RV減速器用軸承的受力分析
2016-07-26 00:55:38張振強王東峰劉勝超李獻會何崇光
軸承 2016年10期
張振強,王東峰,劉勝超,李獻會,何崇光
(1.洛陽軸研科技股份有限公司,河南 洛陽 471039;2.河南省高性能軸承技術重點實驗室,河南 洛陽471039;3.滾動軸承產業技術創新戰略聯盟,河南 洛陽 471039)
RV(Rotary Vector)減速器是在擺線行星減速器機構的基礎上形成的二級封閉傳動機構,因體積小、抗沖擊力強、扭矩大、定位精度高、振動小、減速比大等優點被廣泛應用于工業機器人、機床、醫療檢測設備、衛星接收系統等領域[1,2]。
日本帝人等公司生產的RV減速器所用軸承均由NSK和NTN等公司提供,其相關技術保密;國內關于RV減速器零部件的研究[3-5]主要集中在擺線輪,關于減速器用軸承的研究較少,且該類軸承受力狀況難以確定,給軸承的優化設計帶來了困擾。隨著德國工業4.0和中國制造2025的提出,國內機器人行業迅速發展,但國內RV減速器性能與國外仍存在明顯差距,其重要原因為國產軸承性能無法滿足減速器使用要求。洛陽軸研科技股份有限公司通過與減速器廠家合作,對RV減速器所用軸承進行科研攻關,研發出一系列RV減速器專用軸承,并對其進行受力分析,以期為該類軸承的設計提供參考[6-8]。
1 運動原理
RV減速器結構及軸承安裝示意圖如圖1所示,其內部主要有主軸承(通常為角接觸球軸承)、保持架組件和圓錐滾子軸承3類軸承,其具體結構如圖2所示(某些型號的減速器還會用到深溝球軸承),一臺減速器總共采用10~16套軸承。RV減速器的運動原理:輸入齒輪通過與正齒輪嚙合帶動曲柄軸旋轉(包括自轉與公轉);曲柄軸在轉動過程中帶動擺線輪旋轉,曲柄軸中間的2套保持架組件起到支承擺線輪的作用,曲柄軸兩端的圓錐滾子軸承起到支承曲柄的作用;在支承凸緣被固定的情況下,擺線輪通過與針齒的嚙合帶動減速器外殼轉動;在減速器外殼被固定的情況下,擺線輪通過與針齒嚙合帶動支承凸緣轉動。

1—外殼;2—針齒;3—RV齒輪;4—主軸承;5—支承凸緣;6—輸入齒輪;7—曲柄軸;8—保持架組件;9—圓錐滾子軸承;10—正齒輪;11—軸

圖 2 RV減速器用軸承
2 受力分析
2.1 主軸承
RV減速器用主軸承通常為角接觸球軸承,2套軸承背對背安裝在減速器外殼與支承凸緣上,其受力如圖3所示。

圖3 RV減速器主軸承受力示意圖
在外力F1和F2的作用下,行星架受到傾覆力矩M1,該力矩主要由主軸承A和B共同承擔。由于2套軸承背對背安裝,外部軸向力F1由主軸承B承擔,主軸承A不受外部軸向力,則由以上關系可得
M1=F1c+F2d,
(1)
FrAa+FrBb-M1=0,
FrA+F1-FrB=0,
FaB=F2,
式中:Fa,Fr分別為軸向力和徑向力;a,b,c,d分別為各力與作用點的距離。
故軸承A和B所受的作用力分別為
FaA=0,FrA=(F1c+F2d-F1b)/(a+b),
FaB=F2,FrB=(F1a+F2d+F1c)/(a+b)。
2.2 保持架組件
RV減速器的擺線輪是RV減速器傳遞扭矩的關鍵零部件,RV減速器擺線輪受力示意圖如圖4所示(T1為該擺線輪傳遞的扭矩),由于RV減速器中2個擺線輪同時受力,則總扭矩
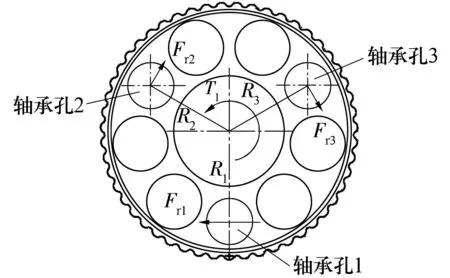
圖4 RV減速器擺線輪受力示意圖
T=2T1=2(Fr1R1+Fr2R2+Fr3R3),
(2)
R1=R2=R3,
式中:R1,R2,R3為軸承孔中心到擺線輪中心的距離;Fr1,Fr2,Fr3為位于軸承孔1,2,3中的3個保持架組件對擺線輪的作用力。
由于3個保持架組件均分擺線輪施加的力,則
Fr1=Fr2=Fr3,
(3)
由(2)式和(3)式可得每個保持架組件所受徑向力為T/(6R1)。
2.3 圓錐滾子軸承
曲柄軸受力示意圖如圖5所示,在O,O3點受到圓錐滾子軸承的支承力;在O4點受到正齒輪的作用力帶動曲柄軸旋轉;在O1,O2點受到保持架組件的反作用力阻礙曲柄軸旋轉。

圖5 曲柄軸受力示意圖
保持架作用在曲柄軸上的力為
F2y=F3y=T/(6R1),
(4)
則施加到曲柄上的扭矩為
(5)
式中:e為偏心距。
在O4點曲柄軸受到的扭矩T4為
T4=T2+T3=Te/(3R1),
(6)
在T4作用下,偏心軸在O4點受到的作用力F5y與F5z實際上是齒輪嚙合過程中受到的切向力和徑向力,故可得
T4=F5yR4,
把兩根木棍擺成十字形,中間用黏土固定。在黏土球上繞好細繩,掛起來。現在,按照圖中的樣子拴好紙飛機。你能讓它們保持平衡嗎?
(7)
F5z=F5ytanα,
式中:R4為齒輪的節圓半徑;α為齒輪壓力角。
由(6)式和(7)式可得
F5y=Te/(3R1R4),
(8)
在xOz平面內
F1z+F4z-F5z=0,
(9)
F4zlOO3-F5zlOO4=0,
則
(10)
式中:lOO3為O與O3之間的距離;lOO4為O與O4之間的距離。
在xOy平面內
F1y-F2y+F3y-F4y-F5y=0,
(11)
F2ylOO1-F3ylOO2+F4ylOO3+F5ylOO4=0,
則
F4y=(F3ylOO2-F2ylOO1-F5ylOO4)/lOO3,
(12)
F1y=F2y-F3y+F5y+
(F3ylOO2-F2ylOO1-F5ylOO4)/lOO3。
式中:lOO1為O與O1之間的距離;lOO2為O與O2之間的距離。

3 實例分析
以帝人RV100C減速器為例,其結構參數見表1,其瞬時最大容許轉矩為T=4 900 N·m,瞬時最大容許力矩為M1=4 900 N·m。

表1 RV100C結構參數
根據上述計算方法,角接觸球軸承、保持架組件、圓錐滾子軸承所受的最大徑向力分別為23.6,11.7,2.17 kN。
4 結束語
闡述了RV減速器的運動原理,從理論上提出了內部軸承的受力分析方法,并對帝人RV100C所用軸承進行了受力分析。研究表明,RV減速器主軸承(角接觸球軸承)受力最大,保持架組件次之,圓錐滾子軸承受力最小,與實際使用情況相符,說明該理論分析的正確性,為RV減速器用軸承的設計和驗證提供了參考。