參數(shù)不確定系統(tǒng)基于輸出反饋的H∞控制和二次穩(wěn)定性研究
2016-07-26 01:58:08劉世勛呂明珠中認(rèn)沈陽北方實(shí)驗(yàn)室有限公司沈陽110141遼寧裝備制造職業(yè)技術(shù)學(xué)院沈陽110034
電大理工 2016年1期
劉世勛 呂明珠中認(rèn)(沈陽)北方實(shí)驗(yàn)室有限公司 (沈陽110141)遼寧裝備制造職業(yè)技術(shù)學(xué)院 (沈陽110034)
?
參數(shù)不確定系統(tǒng)基于輸出反饋的H∞控制和二次穩(wěn)定性研究
劉世勛呂明珠
中認(rèn)(沈陽)北方實(shí)驗(yàn)室有限公司(沈陽110141)遼寧裝備制造職業(yè)技術(shù)學(xué)院(沈陽110034)
摘要針對(duì)線性系統(tǒng)的時(shí)變范數(shù)邊界參數(shù)不確定問題和外部干擾問題進(jìn)行了研究,設(shè)計(jì)了能使閉環(huán)控制系統(tǒng)二次穩(wěn)定的線性動(dòng)態(tài)輸出反饋控制器,并對(duì)于所有的允許不確定參數(shù)達(dá)到了規(guī)定程度的擾動(dòng)衰減,獲得了上述問題與標(biāo)定H∞控制問題的等效性,仿真結(jié)果表明,所提出的控制器的設(shè)計(jì)方法與原有方法相比對(duì)不確定參數(shù)具有更好的魯棒性。
關(guān)鍵詞參數(shù)不確定;H∞控制;二次穩(wěn)定;線性動(dòng)態(tài)輸出反饋控制器;擾動(dòng)衰減中圖分類號(hào):O231.2
文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1003-3319(2016)01-00032-02
眾所周知,H∞控制與許多魯棒問題聯(lián)系緊密,如靈敏度最小化和不確定系統(tǒng)的穩(wěn)定性問題。然而,當(dāng)配置不確定參數(shù)時(shí),用標(biāo)準(zhǔn)H∞控制理論很難保證系統(tǒng)的H∞性能以及穩(wěn)定性。迄今為止,時(shí)變參數(shù)不確定系統(tǒng)的H∞控制器的設(shè)計(jì)問題很少有學(xué)者關(guān)注。參數(shù)不確定系統(tǒng)的穩(wěn)定性問題是控制領(lǐng)域中最為重要的研究方向之一,目前二次穩(wěn)定性理論是處理線性時(shí)變參數(shù)不確定系統(tǒng)魯棒穩(wěn)定的最為有效的方法。所謂二次穩(wěn)定性是指存在一個(gè)反饋控制器使得閉環(huán)系統(tǒng)對(duì)于固定的Lyapunov函數(shù)是穩(wěn)定的。雖然現(xiàn)有的二次穩(wěn)定性研究結(jié)果很豐富,但是在系統(tǒng)某些性能方面很難保證,如擾動(dòng)衰減問題等。為了進(jìn)一步建立H∞控制問題和魯棒穩(wěn)定之間的關(guān)系,本文研究的系統(tǒng)既受控于時(shí)變不確定參數(shù),又受控于擾動(dòng)輸入,處理問題的方法就是建立一個(gè)動(dòng)態(tài)輸出反饋控制器使得閉環(huán)系統(tǒng)是二次穩(wěn)定的且可達(dá)到指定程度的擾動(dòng)衰減。
本文的主要成果在于建立了參數(shù)不確定系統(tǒng)的魯棒H∞問題和標(biāo)定H∞控制問題之間的聯(lián)系。因而,我們可以利用現(xiàn)有的H∞控制方法來解決魯棒H∞控制問題。而基于輸出反饋的二次穩(wěn)定性問題作為一種特殊情況也可以等效于標(biāo)定H∞控制問題,該方法也可以推廣到更為廣義的不確定參數(shù)系統(tǒng)中去。
1 問題的描述
考慮如下參數(shù)不確定系統(tǒng)
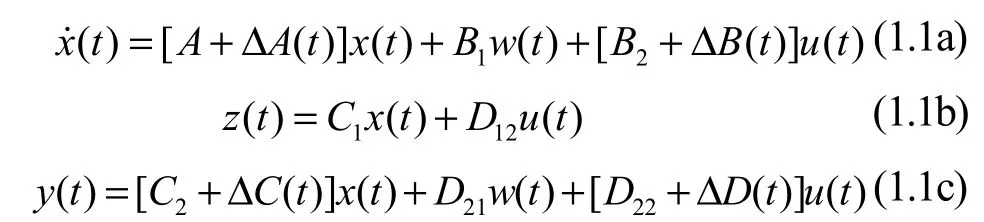
這里的所指的參數(shù)不確定矩陣式有界的,并具有如下形式:


這里,F(xiàn)()?是勒貝格可測(cè)函數(shù),σ>0是給定常數(shù)。我們的目的是要對(duì)于(1.1)描述的系統(tǒng)設(shè)計(jì)一個(gè)線性動(dòng)態(tài)輸出反饋控制器,使得其閉環(huán)系統(tǒng)是二次穩(wěn)定的而且對(duì)于所有滿足(1.3)的不確定參數(shù)具有H∞干擾抑制作用。
考慮如下系統(tǒng):

定義1.1[1]:對(duì)于一個(gè)給定的數(shù)值γ>0,如果能夠滿足如下的條件
1)A是一個(gè)穩(wěn)定矩陣

則系統(tǒng)(1.4)是穩(wěn)定的。
引理1.1[2]:對(duì)于一個(gè)給定γ>0,系統(tǒng)(1.4)時(shí)穩(wěn)定并擾動(dòng)衰減的,當(dāng)且僅當(dāng)存在一個(gè)對(duì)稱矩陣使得

當(dāng)系統(tǒng)(1.4)中包含不確定參數(shù)時(shí),系統(tǒng)方程變?yōu)?/p>
定義1.2[3]:如果存在一個(gè)正定對(duì)稱矩陣P使得所有允許的不確定參數(shù)ΔA( t)滿足

則系統(tǒng)(1.6)是二次穩(wěn)定的。
同理,如果存在一個(gè)線性動(dòng)態(tài)輸出反饋補(bǔ)償器K(s)使得u=K(s)y 下的閉環(huán)系統(tǒng)時(shí)二次穩(wěn)定的,則稱不確定系統(tǒng)(1.1)是在基于線性動(dòng)態(tài)輸出反饋下二次穩(wěn)定的。
為了保證系統(tǒng)(1.6)的H∞特性,我們沿用了二次穩(wěn)定性的定義,并得得到了帶有擾動(dòng)衰減的二次穩(wěn)定性的定義。
定義1.3[4]:對(duì)于一個(gè)給定γ>0,如果存在一個(gè)對(duì)稱正定矩陣P使得對(duì)于所有允許的ΔA()?滿足

則稱系統(tǒng)(1.6)是帶有擾動(dòng)衰減的二次穩(wěn)定。
引理1.2[5]:設(shè)系統(tǒng)(1.6)是帶有擾動(dòng)衰減的二次穩(wěn)定(γ>0)則系統(tǒng)不僅是二次穩(wěn)定的且對(duì)于零初始條件下的有

說明1.2:帶有擾動(dòng)衰減的二次穩(wěn)定性的定義是二次穩(wěn)定到H∞特性的擴(kuò)展,而且由于(1.8)中也存在不變矩陣P的要求,使得該定義也存在保守性。但是,該定義將二次穩(wěn)定和擾動(dòng)衰減聯(lián)系起來,為我們提供了一個(gè)處理參數(shù)不確定和擾動(dòng)輸入的可行方法。
2 研究結(jié)果
為了便于建立魯棒H∞和標(biāo)定H∞控制問題的等效性,我們引入如下一個(gè)系統(tǒng):

下面,我們要建立一個(gè)關(guān)鍵性的引理。
引理2.1:對(duì)于給定常數(shù)γ>0,若存在一個(gè)矩陣P>0使得

對(duì)于所有滿足(1.3)的F(t)成立當(dāng)且僅當(dāng)存在一個(gè)常數(shù)ε0>使得

證明:充分性。對(duì)于任意ε0>,有必要性。假設(shè)存在一個(gè)矩陣P>0,滿足
可見,存在一個(gè)常數(shù)ε>0使得

成立。
推論2.1:對(duì)于給定常數(shù)γ>0,(1.1)的自然系統(tǒng)(u(t)≡0)是帶擾動(dòng)衰減二次穩(wěn)定的,當(dāng)且僅當(dāng)存在一個(gè)標(biāo)定參數(shù)ε0>使得(2.1)的自然系統(tǒng)(u(t)≡0)是一致擾動(dòng)衰減穩(wěn)定的。
定理2.1:令γ>0是一個(gè)描述衰減程度的數(shù)值,K(s)代表一個(gè)給定的線性動(dòng)態(tài)控制器,則系統(tǒng)(1.1)是基于輸出反饋控制器K(s)帶有擾動(dòng)衰減二次穩(wěn)定的,當(dāng)且僅當(dāng)存在一個(gè)常數(shù)ε0>使得(2.1)的閉環(huán)系統(tǒng)和K(s)是一致擾動(dòng)衰減穩(wěn)定的。
證明:設(shè)K(s)是下面的狀態(tài)空間描述:
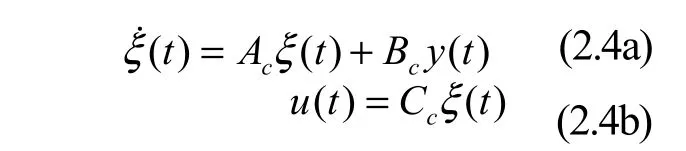

其中,

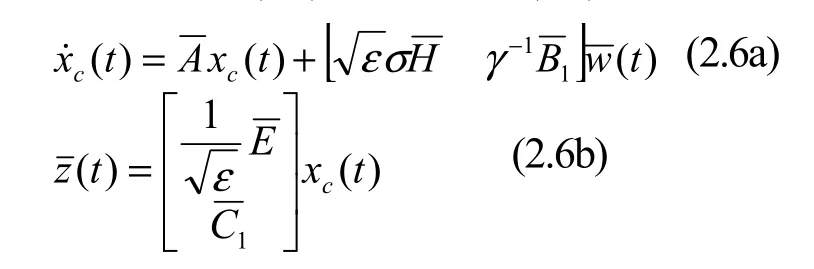
同樣,系統(tǒng)(2.1)帶有控制器(2.4)的狀態(tài)空間方程為
說明2.1:定理2.1建立了系統(tǒng)(1.1)的魯棒H∞控制問題和系統(tǒng)(2.1)的標(biāo)定H∞控制問題的等效性。因此,H∞魯棒控制問題可以通過現(xiàn)有的H∞控制理論得到解決。此外,定理2.1也允許參數(shù)化所有的線性動(dòng)態(tài)輸出反饋控制器來解決魯棒H∞控制問題。
下面,我們來討論系統(tǒng)(1.1)基于線性動(dòng)態(tài)輸出反饋的二次穩(wěn)定性問題。
與魯棒H∞控制問題相似,系統(tǒng)(1.1)的二次穩(wěn)定性可以等效為如下系統(tǒng)的H∞控制問題:
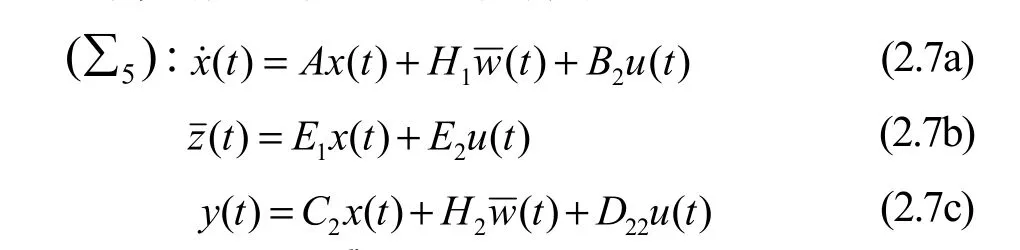
定理2.2:系統(tǒng)(1.1)基于一個(gè)給定線性動(dòng)態(tài)輸出反饋控制器K( s)二次穩(wěn)定的,當(dāng)且僅當(dāng)(2.7)的閉環(huán)系統(tǒng)和是以擾動(dòng)衰減穩(wěn)定的。
說明2.2:從定理2.2可以看出,H∞控制理論也可以推廣到基于線性動(dòng)態(tài)輸出反饋的二次穩(wěn)定性問題。此外,定理2.2也允許參數(shù)化所有的線性動(dòng)態(tài)輸出反饋控制器來解決系統(tǒng)(1.1)二次穩(wěn)定性問題。
3 仿真實(shí)例
考慮如下含有擾動(dòng)參數(shù)d的不確定系統(tǒng):
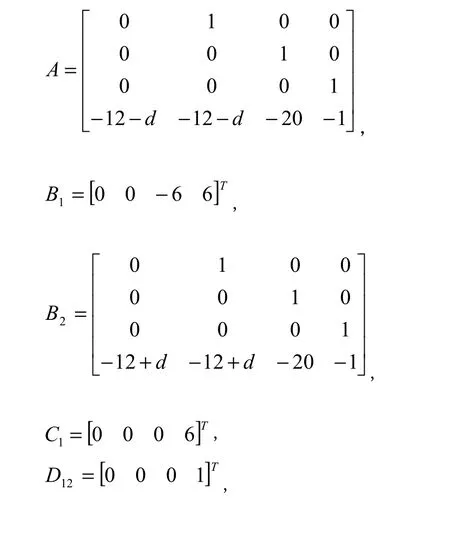
對(duì)于如上系統(tǒng),當(dāng)不確定參數(shù)d的最大攝動(dòng)值為12.65時(shí),由定理2.1,設(shè)輸出反饋控制器為

當(dāng)不確定參數(shù)d在[0,12.65]范圍內(nèi)攝動(dòng)時(shí),該參數(shù)不確定系統(tǒng)在上述控制器K的作用下魯棒穩(wěn)定。此外,由文獻(xiàn)[6]給出的魯棒穩(wěn)定控制條件在0≤d≤11.62時(shí)有可行解,但當(dāng)d=12.65時(shí)沒有可行解存在,這說明本文給出的控制器設(shè)計(jì)較文獻(xiàn)[6]具有更低的保守性。
下面借用文獻(xiàn)[9]給出的不確定系統(tǒng)穩(wěn)定指標(biāo),定義泛函ρ(d)作為不確定系統(tǒng)穩(wěn)定的度量指標(biāo),其值為通過輸出反饋后得到的閉環(huán)系統(tǒng)中所有特征值實(shí)部的最大值,圖1分別給出了按照不同方法得到的ρ(d)值,其中,曲線1代表基于標(biāo)準(zhǔn)二次穩(wěn)定理論,曲線2代表本文定理2.1的數(shù)值結(jié)果。
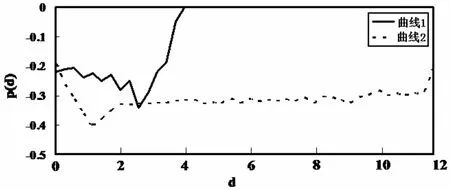
圖1 兩種方法得到的ρ(d)值對(duì)比
由圖1可知,采用標(biāo)準(zhǔn)二次穩(wěn)定理論設(shè)計(jì)的閉環(huán)系統(tǒng)在不確定參數(shù)d變化到4以后時(shí)失穩(wěn);而本文方法對(duì)于不確定參數(shù)d在[0,12.65]范圍內(nèi)變化時(shí)均有嚴(yán)格可行解存在。
4 結(jié)論
本文提出了時(shí)變參數(shù)不確定系統(tǒng)的線性動(dòng)態(tài)輸出H∞控制問題,根據(jù)帶擾動(dòng)衰減的二次穩(wěn)定性的定義,解決了基于線性動(dòng)態(tài)輸出反饋的魯棒H∞控制問題和二次穩(wěn)定性問題,并用已有結(jié)果作為本文的實(shí)例,可較好的改善原有結(jié)果的保守性。仿真結(jié)果表明,本文方法對(duì)于不確定參數(shù)系統(tǒng)具有更好的魯棒性。
參考文獻(xiàn)
[1]I.R.Petersen,”DisturbanceattenuationandH∞optimization:Adesign method based on the algebraic Riccati equation,”IEEETrans.Automat.Contr,1987,32(5):427~429
[2]P.P.Khargonekar,I.R.Petersen,andK.Zhou,”Robust stabilization of uncertain linerr systems:Quadratic stabilizability andH∞control theory,”IEEETrans..Automat.Contr,1990,32(3):356~361
[3]B.R.Barmish,”Necessary and sufficient conditions for quadratic stabilizability of an uncertain system,”J.Optimia. Theory appl,1985,46(4):399~408
[4]L.XieandC.E.deSouza,”RobustH∞controlforlinearsystems with norm-bounded timw-varying uncertainty,”IEEE Trans.Automat.Contr,1992,vol.37,no.6
[5]Lewis F L.A survey of linear singular systems[J],Circuits,Systems andSingularProcessing,1986,5(1):30~36
[6]Chen C J,Wu X W,A relative entropy-based Paretoevolutio-nary algorithm for muiti-objective optimization[J],J of Huazhong AgriculturalUniversity,2003,22(1):65~69.
(責(zé)任編輯:興安)
基金項(xiàng)目:2015年遼寧裝備制造職業(yè)技術(shù)學(xué)院應(yīng)用性專項(xiàng)研究課題“新型傳感器的電磁兼容在線測(cè)試及優(yōu)化設(shè)計(jì)研究”(2015YYYJ-4)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
海峽姐妹(2020年9期)2021-01-04 01:35:44
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
山東青年(2016年1期)2016-02-28 14:25:25
當(dāng)代修辭學(xué)(2014年3期)2014-01-21 02:30:44