基于無線傳感器網(wǎng)絡(luò)的停車位檢測系統(tǒng)
2016-07-25 02:37:50張卓偉李林任煜楊樂劉一鳴
科學(xué)家 2016年4期
張卓偉 李林 任煜 楊樂 劉一鳴
摘要 為了改善停車狀況日益惡化的情況,緩解交通壓力,實(shí)現(xiàn)停車場車輛的自動檢測和智能停車。本課題以停車場為研究背景,根據(jù)無線網(wǎng)絡(luò)車輛檢測系統(tǒng)的實(shí)現(xiàn)原理,選擇超聲波傳感器作為車輛檢測方式,設(shè)計(jì)出一套基于無線傳感器網(wǎng)絡(luò)的停車位檢測系統(tǒng)。本課題分析基于IEEE 802.15.4標(biāo)準(zhǔn)的各種Zigbee技術(shù)網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu),選擇最適合本系統(tǒng)的網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)以搭建無線網(wǎng)絡(luò)。設(shè)計(jì)多元化友好人機(jī)界面。同時對系統(tǒng)的硬件電路和軟件進(jìn)行了詳細(xì)設(shè)計(jì)。試驗(yàn)結(jié)果表明:系統(tǒng)能夠準(zhǔn)確地判定當(dāng)前的車位狀態(tài)。系統(tǒng)的實(shí)現(xiàn)將大大提高停車場內(nèi)部的停車效率,方便進(jìn)入停車場的駕駛員根據(jù)當(dāng)前車位使用情況選擇最佳停車位,能夠?yàn)橛脩籼峁└尤诵曰姆?wù),必將成為智能交通的重要部分。
關(guān)鍵詞 Zigbee;超聲波傳感器;車輛檢測
中圖分類號TP2 文獻(xiàn)標(biāo)識碼 A 文章編號2095—6363(2016)04—0029—02
隨著社會經(jīng)濟(jì)的發(fā)展,私家車的數(shù)量與日俱增,給城市的交通帶來了沉重的壓力。目前,停車場普遍存在以下問題:管理員不了解停車場內(nèi)停車位的占用情況,只能靠人工去勘察。駕駛員在場內(nèi)尋找空余車位時會占用出入主車道資源,造成交通擁堵。因此,設(shè)計(jì)一套能夠?qū)崟r監(jiān)測停車場車位占用情況的停車位檢測系統(tǒng)具有十分重要的意義。
國內(nèi)對停車位檢測的方法有基于機(jī)器視覺的圖像識別技術(shù),紅外傳感技術(shù)等。葉卿等對基于機(jī)器視覺的停車位檢測方法進(jìn)行了研究;華南理工大學(xué)的何建華分析了采用磁阻檢測方式進(jìn)行停車位檢測的可行性;鄭麗玲等對基于超聲波檢測方式的車輛檢測系統(tǒng)進(jìn)行了研究;張足生等、彭燕介紹了基于ZigBee協(xié)議的無線網(wǎng)絡(luò)設(shè)備以及網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu),驗(yàn)證了ZigBee技術(shù)是有效的無線傳感器網(wǎng)絡(luò)組網(wǎng)技術(shù)。
本系統(tǒng)使用超聲波傳感器在車位上進(jìn)行車輛識別,再通過Zigbee網(wǎng)絡(luò)和數(shù)據(jù)網(wǎng)絡(luò)傳輸信息,其無線傳感器節(jié)點(diǎn)可實(shí)時地檢測各個車位的使用情況,讓進(jìn)入停車場的泊車者能夠迅速了解停車場內(nèi)的情況并選擇最佳停車位,為用戶提供更加人性化的服務(wù)。
1系統(tǒng)總體設(shè)計(jì)方案
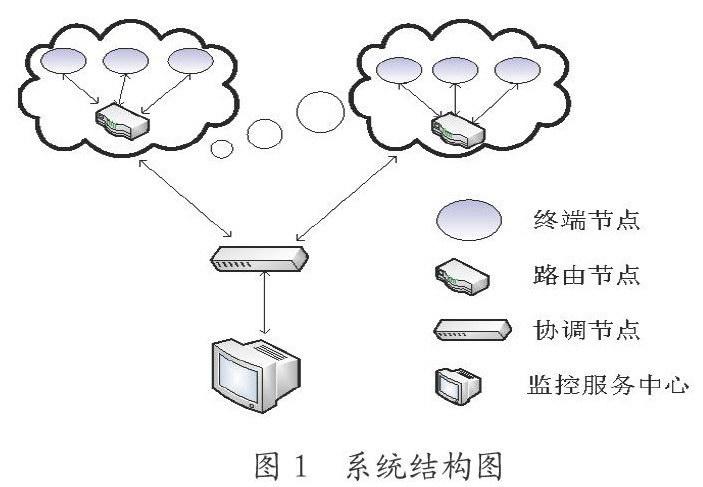
系統(tǒng)主要由傳感器檢測模塊、ZigBee模塊和上位機(jī)軟件模塊組成。該系統(tǒng)通過超聲波傳感器獲得信息,即終端檢測節(jié)點(diǎn)檢測到停車位車輛的存在,從而判別車位狀態(tài),經(jīng)路由節(jié)點(diǎn)的傳輸,信息匯聚到協(xié)調(diào)節(jié)點(diǎn),在上位機(jī)上顯示停車位信息,總體結(jié)構(gòu)如圖1所示。
整個停車位檢測系統(tǒng)的各組成部分功能如下:
1)傳感器檢測模塊由超聲波傳感器和相應(yīng)的信號處理電路構(gòu)成。主要負(fù)責(zé)停車位信息的采集,并將采集到的信息發(fā)送給路由節(jié)點(diǎn)。
2)ZigBee模塊由終端檢測節(jié)點(diǎn)、路由節(jié)點(diǎn)以及協(xié)調(diào)器節(jié)點(diǎn)組成。能夠?qū)⒔K端節(jié)點(diǎn)采集到的信息經(jīng)路由節(jié)點(diǎn)匯聚以后發(fā)送給協(xié)調(diào)器節(jié)點(diǎn),再將總的信息通過串口通信發(fā)送給PC機(jī)。
3)上位機(jī)軟件能夠?qū)C機(jī)發(fā)送來的信息進(jìn)行判斷處理。軟件需求分析包括車位狀態(tài)清晰顯示、網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)的顯示、實(shí)時數(shù)據(jù)保存、地圖重置等。
2系統(tǒng)硬件設(shè)計(jì)
系統(tǒng)硬件主要由PC機(jī)、協(xié)調(diào)器、路由設(shè)備、終端設(shè)備、超聲波傳感器等組成。路由節(jié)點(diǎn)主要完成數(shù)據(jù)的接收與發(fā)送,主要由電源模塊、微處理器模塊組成;協(xié)調(diào)器負(fù)責(zé)數(shù)據(jù)的無線接收與發(fā)送,并通過串口通信模塊與PC相連接;終端節(jié)點(diǎn)加以傳感器檢測模塊,實(shí)現(xiàn)數(shù)據(jù)采集的功能。
2.1 US-100超聲波傳感器
US-100測距的工作原理主要是將模塊設(shè)定為串口觸發(fā)模式,在Trig/TX管腳輸入0X55(波特率9600),系統(tǒng)發(fā)出8個40KH6z的超聲波脈沖,然后檢測回波信號。系統(tǒng)根據(jù)檢測到回波信號所用的時間計(jì)算出與前方障礙物的距離值,另外模塊還要對當(dāng)前溫度值進(jìn)行測量,然后根據(jù)所測溫度對測距結(jié)果進(jìn)行校正,校正后的結(jié)果通過Echo/RX管腳輸出。輸出的距離值共2個字節(jié)(高8位HData與低8位LData),即距離值為(HData×256+LData)mm。
2.2 CC25 30微處理器
基于IEEE 802.15.4標(biāo)準(zhǔn)的Zigbee無線通信技術(shù),由它形成的網(wǎng)絡(luò)必然涉及到射頻電路,CC2530微處理器的出現(xiàn),極大簡化了射頻電路的設(shè)計(jì),它已經(jīng)集成無線射頻功能。CC2530處于休眠模式時所具有的超低功耗使得一個以4節(jié)7號電池并聯(lián)供電的節(jié)點(diǎn)的持續(xù)工作時間能夠達(dá)到半年以上,因此無需經(jīng)常更換電池,保證了節(jié)點(diǎn)使用的長久性。
2.3電源模塊以及供電方式
終端檢測節(jié)點(diǎn)和路由節(jié)點(diǎn)采用4節(jié)7號電池供電的方式,由于協(xié)調(diào)節(jié)點(diǎn)與PC通過USB通信,因此無需提供外部電源,只需利用PC機(jī)上的USB即可實(shí)現(xiàn)外部供電。
3系統(tǒng)軟件設(shè)計(jì)
3.1無線傳輸協(xié)議
為了使設(shè)計(jì)出的節(jié)點(diǎn)具有通用性,系統(tǒng)采用了TI公司開發(fā)的Z-stack協(xié)議棧,這個協(xié)議棧最明顯的特點(diǎn)是兼容性非常好。另外它還支持無線下載,通過Zigbee網(wǎng)絡(luò),可以將程序以無線的方式下載到節(jié)點(diǎn)去。這里只需要使用已有的Z-stack協(xié)議棧即可。在協(xié)調(diào)節(jié)點(diǎn)上拷入CoordinatorEB-Pro,在路由結(jié)點(diǎn)上拷入RouterEBPro,在終端節(jié)點(diǎn)上拷入EndDeviceEB Pro。
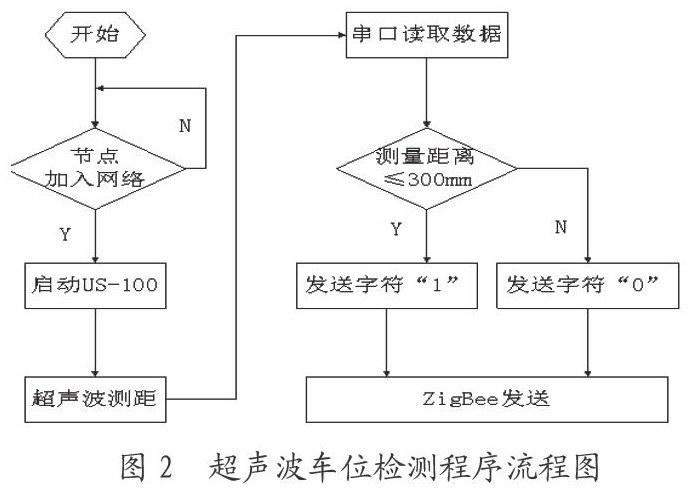
3.2終端檢測節(jié)點(diǎn)程序設(shè)計(jì)
超聲波車位檢測程序流程圖如圖2所示。1)對CC2530進(jìn)行初始化,協(xié)調(diào)器以廣播方式建立網(wǎng)絡(luò),終端以向協(xié)調(diào)器單播的方式加入網(wǎng)絡(luò);2)CC2530組網(wǎng)成功之后,US-100開始工作,超聲波傳感器發(fā)出8個40KHZ的超聲波脈沖;3)終端檢測到有回波返回后,計(jì)算出車底盤到超聲波探頭的距離,并將計(jì)算出的距離值發(fā)送給終端節(jié)點(diǎn);4)終端模塊收到距離值后,對返回的距離值進(jìn)行判斷。設(shè)定距離300mm,若測量距離小于等于300mm,則認(rèn)為該停車位上有車;若測量距離大于300mm,則認(rèn)為該停車位上無車;5)終端模塊調(diào)用無線發(fā)送函數(shù)給協(xié)調(diào)器發(fā)送數(shù)據(jù)。若檢測的停車位上有車,發(fā)送字符‘1,若停車位上無車,發(fā)送字符‘0;6)協(xié)調(diào)器將接收到的數(shù)據(jù)發(fā)送給上位機(jī)軟件。
3.3上位機(jī)軟件設(shè)計(jì)
在Visual C++6.0編程環(huán)境下,結(jié)合Access2007數(shù)據(jù)庫,利用C++程序語言編寫上位機(jī)檢測軟件。軟件可以直觀地觀察到系統(tǒng)的網(wǎng)絡(luò)拓?fù)浜蛙囄粻顟B(tài)等。這里在各個車位圖上放上一個燈并初始化為綠色,燈由綠色變?yōu)榧t色時表示停車位被占用,相反,燈保持綠色則表示停車位空閑。
4試驗(yàn)與結(jié)果分析
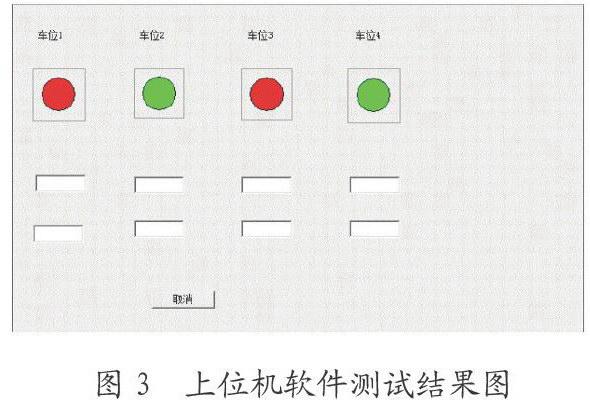
同時將4個終端檢測節(jié)點(diǎn)固定在停車位上,并在節(jié)點(diǎn)1與節(jié)點(diǎn)3上停靠汽車。運(yùn)行上位機(jī)檢測軟件,測試系統(tǒng)能否正常工作,結(jié)果如圖3所示。
由上圖測試結(jié)果可知,節(jié)點(diǎn)1和節(jié)點(diǎn)3的狀態(tài)燈變?yōu)榧t色,表示上方有車輛停靠。故系統(tǒng)準(zhǔn)確地檢測到1、3號停車位上車輛的存在。
5結(jié)論
基于IEEE 802.15.4標(biāo)準(zhǔn)的Zigbee技術(shù)設(shè)計(jì)出的停車位檢測系統(tǒng),分別介紹了系統(tǒng)的總體設(shè)計(jì)方案,對系統(tǒng)涉及到的硬件、軟件進(jìn)行了詳細(xì)的設(shè)計(jì),并通過對終端檢測節(jié)點(diǎn)的測試驗(yàn)證了車輛檢測方法的可行性。所設(shè)計(jì)出的停車位檢測系統(tǒng)具有壽命長、成本低、容量大、準(zhǔn)確度高等諸多優(yōu)點(diǎn),彌補(bǔ)了傳統(tǒng)檢測方式的不足,具有良好的市場應(yīng)用前景,希望對未來交通發(fā)展具有參考價值。
