汽車自動駕駛測評方法研究
2016-07-21 09:54:42何承坤宋娟周唯中國軟件評測中心智能汽車測試實驗室北京100048
工業技術創新 2016年2期
關鍵詞:安全
何承坤,宋娟,周唯(中國軟件評測中心智能汽車測試實驗室,北京,100048)
?
汽車自動駕駛測評方法研究
何承坤,宋娟,周唯
(中國軟件評測中心智能汽車測試實驗室,北京,100048)
摘 要:近年來,汽車自動駕駛發展如火如荼,國內外紛紛把自動駕駛、智能汽車作為國家重要發展戰略目標。但在快速發展的同時,相關安全問題凸顯。本文針對汽車自動駕駛發展過程中的安全問題,基于駕駛員與自動駕駛系統的相似性,提出了一種系統的、全面的汽車自動駕駛測評方法,并針對國內當前亟需開展測評的相關內容進行了分析和架構設計。
關鍵詞:自動駕駛汽車;測試與評價;安全;駕駛行為;智能汽車
引言
近年來,智能汽車、自動駕駛汽車技術正處于飛躍式發展階段。據麥肯錫公司發布的《展望2025:決定未來經濟的12大顛覆技術》研究報告[1],智能汽車排名第六,并預估2025年其潛在的經濟價值為2000億~19000億美元。美國咨詢機構IHS預測[2]:智能汽車將在2025年左右走進尋常百姓家,2035年銷量將達到1180萬輛,占同期全球汽車市場總銷量的9%。美國《美國ITS戰略計劃2015-2019》[3]明確了實現汽車網聯化、加速汽車智能化兩大核心戰略,提出了車輛和道路更安全、增強交通移動性、降低環境影響、促進改革創新、支持交通系統信息共享等5項發展戰略。歐盟《歐洲自動駕駛智能系統技術路線報告》[4]指出:到2020年,通過自動駕駛技術的應用,實現污染物排放降低20%,道路交通傷亡率降低50%;到2050年,污染物排放降低50%,道路交通傷亡率接近零。
我國《<中國制造20 2 5>重點領域技術路線圖》[5]指出:中國汽車保有量已達1.5億輛。至2020年,遠程通訊互聯終端整車裝備率將達50%,駕駛輔助(DA)、部分自動駕駛(PA)車輛市場占有率約30%。2025年,遠程和短程通訊終端的整車裝備率增至80%,DA、PA車輛占有率保持穩定,高度自主駕駛(HA)車輛市場占有率約10%~20%。
國外主流汽車企業以及互聯網企業正強力研發自動駕駛。谷歌已經完成了第一輛無人駕駛汽車原型,無人駕駛汽車的最高時速將達25英里(約合40千米),在路況清晰的環境下可“看到”最多相當于兩個足球場長度的距離。奔馳在無人駕駛技術上已經相當成熟,實驗車以120公里每小時完成了從德國城市之間超過100km的行駛路程,并且它全程都采用了自動駕駛技術并通過了城市和郊區各種復雜路況的考驗。沃爾沃在中國的城市公共道路上首次測試自動駕駛技術,這輛汽車在西六環主路自動行駛12公里,測試包括了自動跟車停車、沿路自動行駛、避讓車輛、手機操控泊車等項目。特斯拉擁有世界上第一款應用自動駕駛技術的量產車型,與其它競爭對手相比,能夠將自動駕駛技術推向市場,進行大量的實踐。特斯拉可以依靠全球的用戶,完成遍布全球的廣泛路試,了解全球各地的消費者駕駛習慣、道路環境,獲得大量的數據和經驗。除此之外,還有奧迪、寶馬、現代、日產、通用、豐田、雷克薩斯等也紛紛在自動駕駛領域發力。
國內汽車企業和互聯網企業也不甘在自動駕駛領域落后。長安宣布智能汽車發展戰略,計劃2025年實現全自動駕駛,其在睿騁車型上實現的無人駕駛汽車,計劃2016年4月從重慶出發,沿高速公路駛向北京,參加北京國際車展。百度在烏鎮世界互聯網大會上將無人駕駛汽車亮相各國政要面前,該車在北京京新高速、五環完成路測,往返全程均實現自主控制,測試時最高速度達100公里/小時,并完成了多次跟車、加減速、變道、超車、上下匝道、調頭等駕駛動作。此外,上汽、一汽、廣汽、北汽、東風、長城、一汽紅旗、奇瑞、吉利、比亞迪等也紛紛涉足自動駕駛領域。
1 汽車自動駕駛的安全挑戰
自動駕駛相關安全問題已經凸顯。
1.1 交通安全問題
2015年11月之前,谷歌無人駕駛試驗車總行駛里程已經超過320萬公里,共發生過17起事故,密歇根大學交通科學研究院2015年10月的一份研究報告[6]指出:自動駕駛汽車的事故發生率是普通車輛的兩倍,但自動駕駛汽車從來都不是過錯方,而是由于其他的社會車輛并不都習慣自動駕駛車輛行駛特點。然而就在2016 年2月14日,Google無人駕駛車犯錯撞上公交車,零責任記錄被打破。根據加州車輛管理局(DMV)的資料顯示:該車駕駛員說他相信公車會減速,讓無人駕駛車并線進來,但是公車并沒有。所以三秒鐘后,這輛處在自動駕駛狀態的無人車撞上了巴士的側面。
1.2 信息安全問題
從2010年3月美國得克薩斯州GPS遙控事件,2011年3月美國華盛頓大學汽車攻擊面的綜合實驗性分析報告[7],2011年9月DEF CON黑客大會上短信解鎖斯巴魯傲虎,2013年9月DEF CON黑客大會上通過OBD-II控制福特翼虎和豐田普銳斯的方向盤、剎車、油門等,2014年4 月360公司表示特斯拉汽車應用程序存在漏洞,2014年8月黑帽大會上一份調研報告指出許多知名汽車的電子系統都存在安全風險[8],2015 年2月通用安吉星被破解并可實現“定位、解鎖和遠程啟動”,同月美國Ed Markey辦公室發布了《車聯網安全漏洞研究報告》[9],2015年7月菲亞特克萊斯勒召回約140萬輛汽車,至2016 年1月全球首部汽車網絡安全標準—SAE J3061發布。與汽車信息安全相關事件的發生頻率越來越高,攻擊范圍越來越廣,引起全球廣泛關注!
1.3 功能安全問題
功能安全標準ISO26262[10]在部分國家已列為強制標準,然而目前的ISO26262標準尚未針對自動駕駛汽車,預計到2018年發布的新版標準中才會增加自動駕駛部分。(ISO26262采用三個參數評價汽車安全完整性等級,包括:危險造成傷害的嚴重程度S、危險所在工況的發生概率E、駕駛員采取控制避免危險的難易程度C。那如何評定無人駕駛汽車的功能安全?僅僅考慮控制避免危險的難易程度C為最高就可以了嗎?)而目前國內對現有ISO26262標準的轉化工作仍未完成,缺乏針對自動駕駛的汽車功能安全標準及其技術的研究。能否抓住自動駕駛汽車發展機遇,形成突破和創新仍面臨挑戰。
2 國內現狀
缺乏系統的綜合試驗驗證環境。盡管杭州、北京、長春、重慶、常熟、嘉定等地啟動了智能網聯汽車示范驗證基地項目,探索解決智能交通、智能駕駛、智能應用等問題,但由于剛剛處于起步摸索階段,還需要總體規劃,進一步明確各自的定位與分工,更深入研究建立綜合試驗驗證環境的任務路線圖。國內僅有部分廠商擁有一些硬件在環測試臺架,缺乏獨立的測試評價機構及測評環境。
尚未形成自動駕駛安全標準體系。我國在自動駕駛的交通安全、信息安全和功能安全標準制訂方面進度落后,結合我國國情轉化國外標準工作也比較緩慢。與企業溝通較少或者較為片面,對企業引導和指導性不夠。
尚未形成針對性的安全測評技術。國內逐漸認識到自動駕駛汽車的信息安全、功能安全和交通安全問題,但相關測評技術、方法處于起步階段。導致汽車功能安全測評、信息安全測評步步跟隨國外,缺少突破和創新。
3 測評方法
3.1 建立綜合試驗驗證環境
(1)自動駕駛相關產業最迫切的需求是產業鏈體系規劃和建設。公平的第三方認證、檢測和驗證為其互聯互通互操作提供保障。
主管機構:面向行業的管理要求和安全可靠要求,事中事后的監管措施。
地方政府:完善區域產業配套環境,營造良性的產業發展生態環境。
整車企業:集成,市場認可,行業監管要求。
零部件企業:智能應用、部件的驗證與推廣。
通信企業:通信終端的驗證與推廣。
為了滿足這些需求,自動駕駛產業最迫切的需求是提供一個公認的、綜合平臺能夠提供上路準許試驗驗證、安全可靠試驗驗證、互聯互通試驗驗證、產品研發試驗驗證等服務。
(2)為產業發展布局,搭好綜合試驗驗證環境這一平臺,促進關鍵技術發展,服務產品研發。
我們應該要搞清楚未來的自動駕駛應該是什么樣的。汽車行業把自動駕駛分為三類:一類是自主式自動駕駛,以車載傳感器為感知核心;一類是網聯式自動駕駛,以網絡通信為感知核心;第三類是自主網聯式也叫智能網聯式,以車載傳感器為感知核心同時以網絡通信為輔助。我們認為智能網聯式是未來最為可能實現的自動駕駛方式,如圖1所示。

圖1 智能網聯式自動駕駛相關系統
針對這樣系統,建立綜合試驗驗證環境,關鍵之處在于處理試驗驗證相關標準體系和質量保障問題,核心在于需要給出互聯互通的標準——車端應用層中間件或數據融合的標準、云端應用層中間件或基礎數據交互平臺的標準,如圖2所示,使得所有符合這些標準和質量要求的自動駕駛汽車、系統、部件、應用等都可以在這個綜合平臺上進行試驗驗證,而這些試驗驗證獲得的成果又可以反過來使得所制定的車端應用層中間件或云端應用層中間件的標準得到試驗驗證,從而為推廣到更大規模做準備,同時推動自動駕駛關鍵技術的試驗驗證與進步,如圖3所示。

圖2 綜合試驗驗證環境建設的關鍵技術
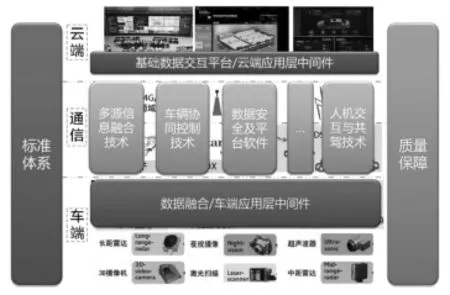
圖3 綜合試驗驗證環境推動關鍵技術發展
3.2 開展自動駕駛安全測評
3.2.1 傳統汽車檢測概況
在中國,為了保障人身安全和行駛安全,傳統汽車上路前需要通過零部件試驗、總成和系統試驗、整車試驗等110項室內和室外的強制性檢測標準,如圖4所示。
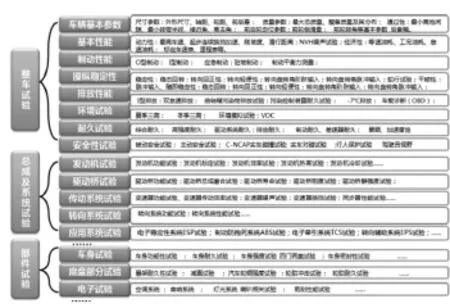
圖4 傳統汽車測評項目概況
為了保障傳統汽車的上路安全,尚需如此復雜的測試,要保障自動駕駛汽車上路的上路安全又需要何種復雜的測試?
3.2.2 自動駕駛安全測評機制
自動駕駛汽車從根本上改變了傳統的“人——車——路”閉環控制方式,采用自動駕駛系統將駕駛員從該閉環系統中替換出去,不僅大大提高了交通系統的效率和安全性,還給人們的出行方式和生活方式帶來了更多的可能。
自動駕駛系統的核心目的是確保自動駕駛系統能夠安全可靠地替換或部分替換駕駛人員的操縱。自動駕駛系統與駕駛員的相似之處如圖5所示,二者都包含了相應的感知、聯通、決策和執行四個關鍵環節,這四個環節是否正常是檢驗合格駕駛員是否能夠安全可靠地駕駛車輛的關鍵要素。世界各國“核準”駕駛員是否可以上路主要采用考駕照的方式,借鑒這一過程,自動駕駛系統拿到上路的“許可牌照”也應遵循類似的考核體系。

圖5 自動駕駛系統與駕駛員的相似之處
目前,駕駛員考駕照一般包括“體檢”、“場地考”、“路考”三個階段,如表1所示,“體檢”階段主要考核人員是否具備駕駛車輛的基本素質,包括是否成年、耳聰目明、手腳靈活、身體健康以及抵抗力強等,“場地考”主要考察人員是否能夠承擔關鍵的駕駛任務,包括在駕駛車輛時是否具備頭腦清晰、方向感好等能力,“路考”主要考核人員在真實道路環境下能否處理復雜情況的能力,即考察駕駛技術是否嫻熟。
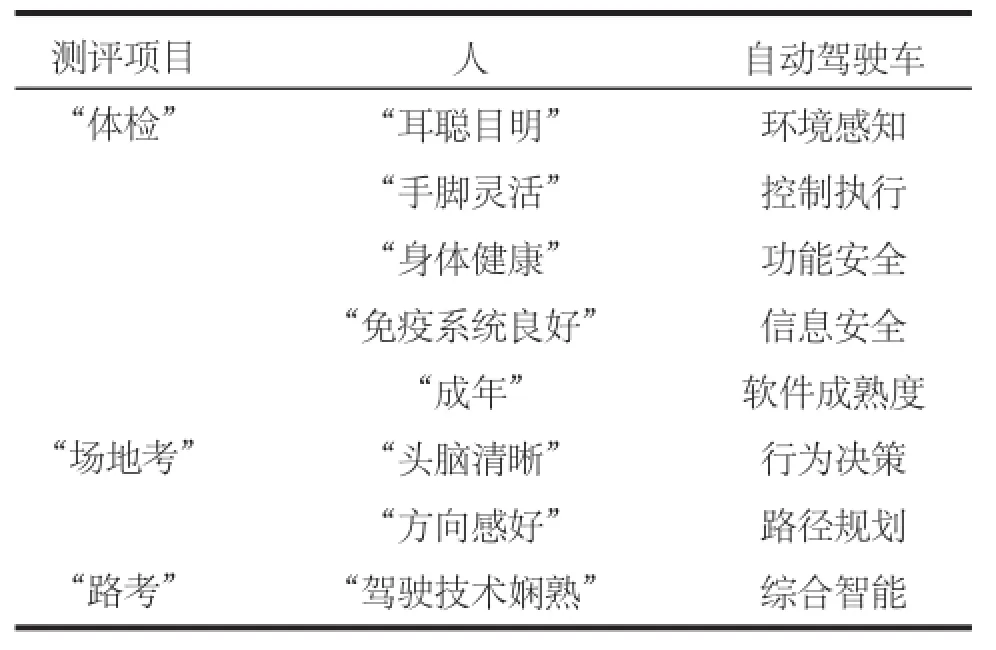
表1 自動駕駛系統測評與駕駛員考核的對照
與此相對,“考核”自動駕駛系統也應包含類似的考核(表1所示),至少應包括以下內容:
※“體檢”:
ü 網絡聯通、環境感知測評——“耳聰目明”
ü 控制執行測評——“手腳靈活”
ü 功能安全測評——“身體健康”
ü 信息安全測評——“免疫系統好”
ü 軟件成熟度測評——“成年”
※“場地考”:
ü 行為決策測評——“頭腦清晰”
ü 路徑規劃測評——“方向感好”
※“路考”:
ü 綜合智能測評——“駕駛技術嫻熟”
3.2.3 國內開展自動駕駛安全測評的思路與計劃
但若一開始就進行如此復雜的“許可牌照”測評,并不利于自動駕駛汽車的發展。為了既能對自動駕駛汽車的安全行駛進行有效監管,同時又不阻礙自動駕駛汽車的發展甚至推進自動駕駛汽車的發展,國內開展自動駕駛測評可以分為三步進行:
第一步:自動駕駛汽車上路測試前,核準其是否具備基本的上路測試能力要求,包括隨車駕駛員需求和自動駕駛汽車需要滿足的基本安全需求,如圖6所示,滿足這些要求后準許其去一些簡單的、不影響交通的道路上有限制地進行測試。
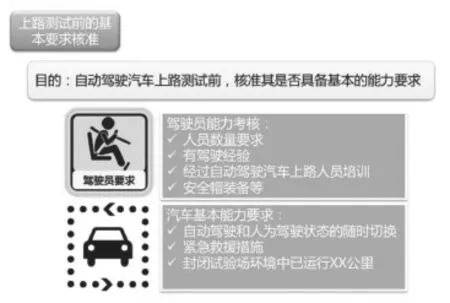
圖6 開展自動駕駛測評的第一步
第二步:自動駕駛汽車上路測試后一段時間后,評估其在不同復雜環境下的行為安全,只有其駕駛行為滿足一定的安全需求后,才允許其到復雜的道路上進行測試,如圖7所示。
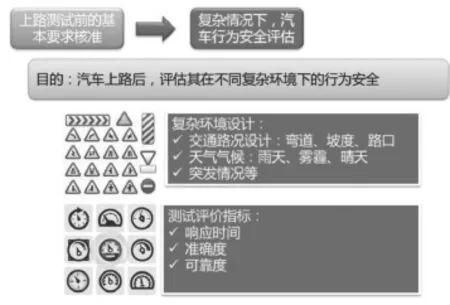
圖7 開展自動駕駛測評的第二步
第三步:自動駕駛汽車滿足行為安全的評估后,要進行全方面、細致的測評,才能正式上路運行,并推廣市場,如圖8所示。

圖8 開展自動駕駛測評的第三步
根據《<中國制造2025>重點領域技術路線圖》,我們可以得出開展自動駕駛測評應有的時間節點(如圖9所示),即2016年左右應核準并頒發自動駕駛汽車部分路段測試牌照、2017年左右應測評自動駕駛汽車的駕駛行為安全性并頒發全路況的測試牌照,2018年至2030年應完成自動駕駛的綜合測評并頒發上路牌照。
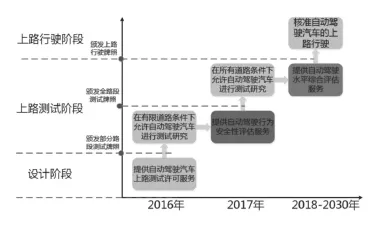
圖9 開展自動駕駛測評的步驟
3.2.4 當前亟需開展的自動駕駛安全測試驗證的主要內容
在上面提及三步思路中,第一步的做法我們可以借鑒當前國際先進水平的做法,尤其是美國的做法,在確定自動駕駛汽車和跟車駕駛員能夠保障汽車行駛安全的前提下盡早的讓其上路測試。然而我們也要吸取其經驗教訓,重點就在于第二步的做法。在讓自動駕駛汽車到更復雜路況下進行測試之前,我們需要盡早開展自動駕駛系統駕駛行為的安全評估,可以從以下幾個方面進行,如圖10所示。
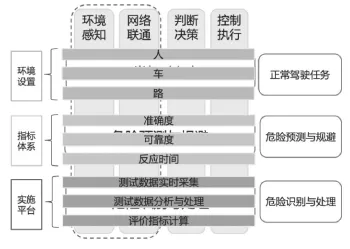
圖10 自動駕駛行為安全測評體系
從橫向上我們需要從環境感知、網絡聯通、判斷決策和控制執行分析它們對自動駕駛行為安全的影響。
從縱向上我們需要考慮三個條件:正常駕駛任務、危險預測與規避、危險識別與處理。正常駕駛任務方面主要考察自動駕駛系統是否能夠在不涉及危險情況下正常完成車輛的駕駛任務,是衡量自動駕駛系統駕駛行為是否安全的基礎;危險預測與規避方面主要考察自動駕駛系統是否能夠在危險發生前預估危險即將出現并采取措施的能力;危險識別與處理方面主要考察自動駕駛系統是否能夠識別已經發生和釋放的危險,并采取合理的措施處理危險情況。這三方面中,當自動駕駛系統具備基本駕駛能力后,尤其要考察自動駕駛系統對危險的響應。
在此基礎上,開展自動駕駛行為安全測試驗證,涉及三方面內容:首先是環境設置或場景設置,需要考慮如何協調人、車、路的要素實現測試環境的設置滿足上面提及的橫向上和縱向上的測評需求;其次,制定指標體系,實現從橫向和縱向上對自動駕駛行為的評定,主要從“準”、“穩”、“快”三方面展開——即準確度、可靠度、反應時間;最后,需要建立自動駕駛行為安全測試的實施平臺,包括測試數據的實時采集、測試數據分析與處理、評價指標計算等。
4 結論
本文通過分析駕駛員與自動駕駛系統的相似之處,從環境感知、控制執行、功能安全、信息安全、軟件成熟度、行為決策、路徑規劃和綜合智能等方面,提出了一種系統的、全面的汽車自動駕駛測評方法,并針對當前亟需開展測評的相關內容——自動駕駛行為安全性測評進行了分析和架構設計。期望本文的研究工作能為國內確保自動駕駛汽車的安全上路提供服務、支持和借鑒。
參考文獻
[1] 詹姆斯·瑪尼卡, 理查德·多布斯, 邁克爾·崔, 展望2025:決定未來經濟的12大顛覆技術 [R].麥肯錫, 2013.
[2]JULIUSSEN E, IHS自動駕駛預測報告 [R].IHS Automotive,2013.
[3]BARBARESSO J, CORDAHI G, GARCIA D, et al., USDOT's Intelligent Transportation Systems (ITS) ITS Strategic Plan 2015-2019 [R].US Department of Transportation, Intelligent Transportation Systems, Joint Program Office, 2014.
[4]DOKIC J, M LLER B, MEYER G, European Roadmap Smart Systems for Automated Driving [R].European Technology Platform on Smart Systems Integration, 2015.
[5] 國家制造強國建設戰略咨詢委員會, 《中國制造 2025》重點領域技術路線圖 [R].《中國制造 2025》重點領域技術創新綠皮書, 2015.
[6]SCHOETTLE B, SIVAK M, A Preliminary Analysis of Real-World Crashes Involving Self-Driving Vehicles [R].The University of Michigan Transportation Research Institute, 2015.
[7]CHECKOWAY S, MCCOY D, KANTOR B, et al.Comprehensive experimental analyses of automotive attack surfaces [M].Proceedings of the 20th USENIX conference on Security.San Francisco, CA; USENIX Association.2011: 6-6.
[8]MILLER C, VALASEK C, A Survey of Remote Automotive Attack Surfaces [R].IOActive, 2015.
[9]MARKE E J, Markey Report Reveals Automobile Security and Privacy Vulnerabilities [R].the staff of Senator Edward J.Markey, 2015.
[10]STANDARDIZATION I O F.ISO26262 Road vehicles Functional safety Part 1-10 [S].Switzerland.2011.
Research for Automobile Autopilot Testing and Evaluation Method
Chengkun He, Juan Song, Wei Zhou
(China Software Testing Center Smart Car Testing Lab, Beijing, 100048, China)
Abstract:In recent years, the technology of autonomous vehicles develops very well.Autonomous vehicles or Smart cars have been mentioned in an important national development strategy at home and abroad.But in the rapid development, related security and safety issues has been showing.In this paper, to deal with the security and safety issues, based on the similarity of the driver of the Autonomous vehicle system, a systematic and comprehensive solutions for automobile autopilot testing and assessment is proposed.The relevant content analysis and architecture design is carried out for the evaluation which needs to be done recently in China.
Key words:Autonomous Vehicles; Testing and Evaluation; Safety/Security; Driving Behavior; Smart Car
中圖分類號:TP206.1
文獻標識碼:A
文章編號:2095-8412 (2016) 02-108-07
DOI:工業技術創新 URL: http//www.china-iti.com 10.14103/j.issn.2095-8412.2016.02.003
作者簡介:

何承坤 (1986-), 男,博士,工程師。研究方向:智能汽車測試。
E-mail: hechengkun@cstc.org.cn
宋 娟 (1984-),女,博士,高級工程師。研究方向:汽車信息安全檢測。
周 唯 (1988-),男,碩士,工程師。研究方向:汽車信息安全檢測。
猜你喜歡
中國科技博覽(2016年18期)2016-10-19 09:59:34
科技視界(2016年21期)2016-10-17 20:00:16
科技視界(2016年20期)2016-09-29 11:59:36
科技視界(2016年20期)2016-09-29 10:54:27
