自動化在線清潔擺桿鏈測試部位的系統的研究
2016-07-09 06:30:38吳愷聞
制造業自動化 2016年5期
吳愷聞
(上海大學 機電工程及自動化學院,上海 200444)
?
自動化在線清潔擺桿鏈測試部位的系統的研究
吳愷聞
(上海大學機電工程及自動化學院,上海 200444)
摘 要:油漆車間擺桿鏈測試精度要求0.1mm,鏈節上沉積的磷化物等的干擾為2mm~3mm。介紹了排除沉積物干擾的清潔系統的研究工作。設計并實現了長期在線自動化功能的實現方法。分析細長懸臂梁受橫向沖擊力的情況,得解析式。解析式的求解過程中運用相對性原理克服了積分常數無法確定的難題。電路方面介紹了克服噪聲干擾的措施。控制程序方面介紹了在狹小空間中交流電機啟停止干擾的克服方法。3個月現場運行表明本系統工作穩定,清潔效果達到精度要求。
關鍵詞:擺桿鏈;清潔系統;彈性懸臂梁;抗干擾
0 引言
汽車廠油漆車間的預處理鏈和電泳鏈是關系到汽車油漆質量的關鍵設備,相關的研究工作曾有報道[1, 2]。
有關設備管理方面的論述也有報道[3]。對重要設備進行測量以獲取第一手數據,是設備管理的基礎,預處理鏈和電泳鏈就是這樣的測試對象。通過行業查詢和現場調研得知,預處理線和電泳線采用的輸送方式多半為推桿鏈[4]、擺桿鏈[5]和RODIP[6]。擺桿鏈因其調速范圍寬、裝掛方式靈活、出入槽角度大等優點受到廣泛應用。擺桿鏈中左鏈與右鏈的同步性、鏈節與驅動輪的嚙合性是這種類型傳動鏈安全性與可靠性的關鍵。對鏈節節距實施在線自動測試是確保擺桿鏈同步性、嚙合性的關鍵基礎工作。在現場調研中得知,擺桿鏈的測試精度要求為0.1mm,而測試準確性受鏈節表面磷化物(預處理鏈)、油污(電泳鏈)的影響為2mm~3mm的數量級。因此,測試前對測試部位進行自動化在線的清潔,成了精確測量鏈節節距的關鍵。
為此而專門研制了在線自動清潔系統。該系統中需要用細長懸臂梁的部分柔性特點。有關結構或構件柔性方面的研究曾見諸報道[7],由于研究對象差別很大而無法直接應用,只得專門進行定量分析與研究。
本系統自動化的關鍵在于總計時系統(如圖2所示),經過調研,針對本項目沒有合適的現成產品或現成方法可用,只得進行專門的研究工作。

圖1 左清潔系統結構圖
1 清潔系統描述
左鏈、右鏈各有一個清潔系統。兩者相仿,此處僅介紹左鏈的清潔系統。如圖1所示,清潔系統結構中的活動部分通過金屬底板固定在框架上,框架通過環抱的方式固定于鏈子軌道上。電機完成清潔旋轉的主運動,電機的伸縮通過氣缸完成。
在氣缸活塞伸出期間中的一段時間內,輪刷和鏈節之間保持垂直方向上的相對靜止,該相對靜止過程與清潔效果直接有關,這種相對靜止是通過金屬板和滑軌之間的鉸鏈結構,通過重力,并通過鏈節對清潔系統中的活動部分提供的提升力三者之間的配合而實現的。相對靜止時間的長度與清潔效果成正相關性關系,據此,將相對靜止時間長度設計成可調節,從而確保了清潔的效果。
氣缸活塞伸出后,鏈節以100mm/s垂直向上的速度將垂直方向處于靜止的輪刷向上提升,從力學角度分析,等效于施加了一個向上的沖擊力。為了保護清潔系統在長期的運行中免受沖擊力的影響,也為了保護輪刷,設計了兩根細長的護桿,具備彈性懸臂梁的特點。

圖2 左清潔系統電路框圖
左清潔系統的電路框圖如圖2所示,圖中還將工作相關的其他兩個系統也繪制在內(灰色)。整個大系統受一個總計時系統的指揮,定時時間到,全部從休眠狀態蘇醒過來。
蘇醒后,各系統的啟動、停機受控于霍爾傳感器與安裝在鏈子上的磁鋼之間的感應信號。
第一次感應觸發啟動,控制模塊通過繼電器1開始驅動電機,同時氣缸活塞開始隨著鏈節的運行而嚴格同步地伸縮。氣缸活塞伸出的控制信號是通過清潔系統與測試系統之間的通信、以及左鏈、右鏈清潔系統之間的通信而獲得,以保持整個大系統的各個分系統之間的步調一致。該信號由控制模塊捕獲并通過繼電器2驅動氣路電磁閥,從而實現氣缸活塞的伸出。氣缸活塞的收縮控制信號由清潔系統的本地計時模塊提供,該計時長度設計成具有可調的特點,從而確保了清潔的效果。
霍爾傳感器與磁鋼之間的第二次感應觸發停機,控制模塊立即停止電機與氣路電磁閥的工作,隨后各系統再次進入休眠狀態。按照這樣的控制機理,可以確保了每次清潔過程恰好是完整的一周,不多一節,也不少一節,避免了部分鏈節重復清潔或者遺漏清潔,而這種遺漏或重復在長期運行中會形成測試誤差的累積效果。
2 總計時系統
由于總計時系統是清潔系統實現自動化的關鍵所在,在硬件上把它設計成控制系統內的一部分,在功能劃分上設計成獨立的功能系統,這樣有利于避免外購的外置計時系統可能存在的內部缺陷、硬件通信信道上的可能失配等的風險,從而最大限度地確保其工作的穩定性。
該計時系統的時鐘源采用高精度的晶體振蕩器(32.768kHz),年誤差不超過30秒。用控制模塊中的T1分模塊實現秒脈沖信號,具體采用該分模塊的外觸發異步計數的工作模式。由此,可以獲得長期走時精確運行穩定的秒時鐘源。具體計算如下:
(1/32768Hz) ×256×128 =1也就是說,讓T1分模塊的預分頻和后分頻都設為1,將TMR1L和TMR1H都清零后開始計時,一旦TMR1H的最高位bit7=1,就代表1秒鐘。此時TMR1L由于ROLLOVER的效果,不需要外界介入,只需將TMR1H清靈并送出秒鐘脈沖即可。
根據現場調研得知,現場工作一般以“周”為工作計劃安排的基本時間單位。各個工廠的測試周期要求也有差別,有些為企業以4周為一個測試周期,另一些以13周為一個周期,還有個別以26周為一個周期。部分以“天”為基本時間單位,如30天,60天,90天等。
對于本系統的研發過程而言,需要以“分”、“時”作為基本時間單位。
由此可見,要求周期是可調節的,并且調節的過程方便、可靠。據此,確定以PC機下載周期的方式。
在研發過程中,提供四個文本框供輸入清潔周期中的“周”、“天”、“時”、“分”。變量分別用Cwek、Cday、Chor、Cmin。當清潔系統完成研制提供給用戶時,“時”和“分”的文本框設為不可見。
同時,用五個變量寄存器Sec、Min、Hor、Day、Wek來表示計時過程中的秒、分、時、天、周,具體如下:
Sec預置196,遞增后進位給Min,且自身預置196;Min預置196,遞增后進位Hor,且自身預置196;Hor預置232,遞增后進位Day,且自身預置232;Day預置249,遞增后進位Wek,且自身預置249;Wek預置0,無進位,僅溢出,溢出時自身預置0。舉例說明如下:周期為4周。
用戶在“周”的文本框內輸入4,PC程序自動轉換如下:

Csec等五個變量由PC下載給總計時系統后,寫入EEPROM內,并讀入RAM。
總計時系統向min進位時作如下判斷:Min⊕Cmin=0 & Hor⊕Chor=0 & Wek⊕Cwek=0 (1)如果式(1)判斷的結果為真,就發出清潔計時到點的脈沖信號,讓各分系統全部從睡眠中醒來,做好清潔的準備工作。同時讓Sec、Min、Hor、Day、Wek全部恢復預置值。由此,實現了長期自動化在線清潔的功能,最長限度為255周,即4年零325天。
為滿足長期運行的要求,設計時增添了時鐘撥準功能。
為了滿足有些場合下需要立刻開始清潔的要求,設計了“一鍵式”功能。
3 輪刷護桿作用和受力分析與計算

圖3 輪刷和護桿
如圖3所示,對測試點的清潔工作是通過電機帶動輪刷旋轉來實現的。當氣缸活塞伸出后,垂直方向靜止的輪刷和以每秒100mm向上運行的鏈節相互碰撞。如果按照這樣的方式長時間受沖擊力的作用,清潔系統的機械結構容易失去穩定的工作狀態,同時輪刷的金屬刷毛將產生嚴重變形而導致清潔能力大幅下降。如圖3所示,用兩根護桿不但減緩清潔系統機械結構受到沖擊力的作用,而且讓輪刷在垂直方向從靜止到每秒100mm的速度之間有一個合理的加速過程,由此可使清潔系統能長期穩定工作。輪刷的刷毛末端低于護桿5mm,有此5mm,輪刷能有效地清潔鏈節測試部位,同時其刷毛不會產生嚴重變形。據此目的,經過初步計算我們將護桿設計成直徑5mm長度153mm的不銹鋼桿。這樣的細桿受橫向碰撞,其安全性與穩定性需要仔細校核,具體如下:
一般情況下我們認為載荷是從零開始平緩增加的,以致在加載過程中加速度很小,可以不計。載荷加到最終值后也不再變化。即所謂靜載荷。

圖4 電機杠桿示意圖
但是在這個項目中,當氣缸活塞收縮回去之后,清潔系統的整個活動部分在重力作用下繞鉸鏈軸向下擺動,直至落在緩沖器上(緩沖器位于滑軌下方,圖1中無法顯示)。當氣缸活塞再次伸出后,以每秒100mm向上運行的鏈節撞到護桿時具有相當的沖量。
設FM為電機受到護桿的向上力。如圖4所示,A點角加速度α為(共有兩根護桿):

其中:

護桿形變為[8]:

設ω11為電機角速度,根據圖4進行幾何分析與材料形變分析可知:

整理式(5),并對t求導,得:

將式(2)、式(4)代入式(6):

整理得:

解式(8),得[9]:

對式(11)的討論:護桿給電機提供的向上力由兩部分組成,第一部分為振動部分,這體現了護桿的彈性/彈簧特征,這正是我們所希望的。有了彈簧特性,就可以保護電機等部件免受沖擊力,也可以避免輪刷被鏈節的突然接觸而損壞。上述受力分析中為簡化起見而略去了阻尼,而工程實踐中阻尼客觀存在,因此實際上振動部分的振幅呈遞減規律。
校核護桿的強度:通常情況下利用兩個特殊時間點的條件可確定式(11)中的積分C1、C2,據此計算出Fmax并進行校核。現在僅有一個條件可利用,不得不改變思路,即:利用相對性原理,考慮將相同結構的電機、護桿等機構,一端繞鉸鏈,另一端以V0的速度撞向鏈節,碰撞瞬間護桿處在水平位置。


k為剛度系數,由能量守恒得(共有兩護桿):

解式(12):

根據合理性分析,式(13)中舍去了減號。
根據k的定義,又根據?是形變最大值,有:

代入式(13):

式(15)中的k沒有現成的表達式可用,必須專門推導,具體如下:
對于懸臂梁末端受到力F作用時的繞度為:

根據k的定義,并將式(16)代入:

式(17)為懸臂梁一端受集中力F,梁長為l的剛度系數通用表達式。
將式(17)代入式(15),常數代入:

校核強度如下[10]:

材料選為不銹鋼0Cr19Ni9N,其屈服強度為275Mpa[11],因此,護桿的強度是足夠的。
對式(11)的進一步討論:FM中的恒定部分為5.5N,由式(18)可得振蕩部分的幅值13.5-5.5=8N,占了一半還多,說明本設計中的護桿,其彈性保護作用是顯著的。
從現場3個月的實際運行結果看:本部件未發生塑性形變,安全性是充分的。
4 電子線路
電子線路總體的方案與功能在第1部分已有介紹,不再贅述。此處將電子線路的一些細節方面的設計作一些介紹。
在電子線路上,我們首要考慮的是安全。因此我們在主板上以及在清潔系統的內部走線上將低壓區與高壓區嚴格分離。為了防止萬一某種偶然因素導致氣缸活塞不能及時縮回,從而避免清潔系統被隆隆而過的擺桿鏈的鏈節拉扯而損毀,在滑軌繞鉸鏈擺動的極限位置上設置一個限位開關。一旦接近擺動的極限位置,限位開關上的彈性片被壓而關閉相應的電路,導致氣路電磁閥向著讓活塞縮回這一確定的方向運行,從而排除了事故的隱患。
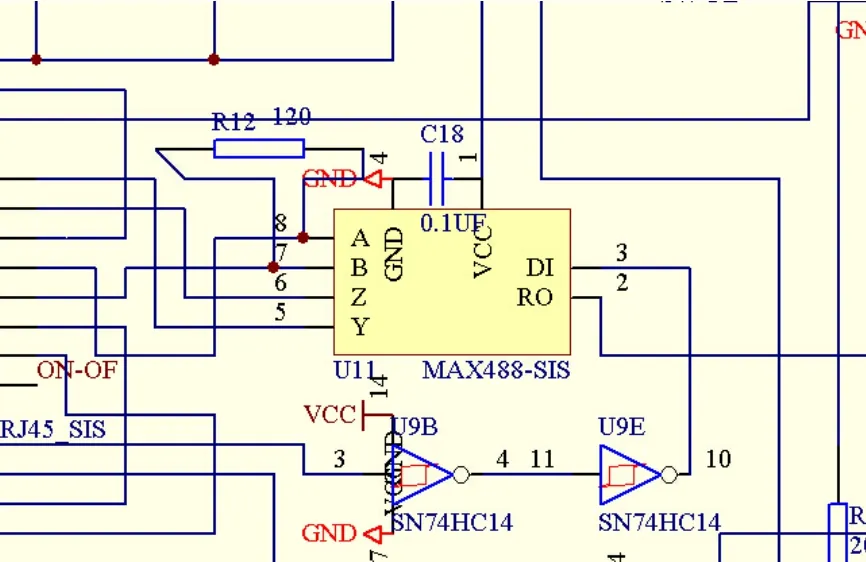
圖5 差模放大電路

圖6 共模環形電感
其次是穩定性。在車間現場,各種電磁干擾與背景噪聲很嚴重。如何提高清潔系統在車間現場的抗干擾能力,顯得尤其重要。為此,我們使用雙絞線實現測試主機與清潔系統之間的通信,以及擺桿鏈左鏈與右鏈兩個清潔系統之間的通信,以減弱干擾的作用。遠程通信使用差模放大電路,進一步提高抗干擾能力,如圖5所示。在一些特殊環節使用共模環形電感來抑制噪聲,如圖6所示。在一些關鍵集成電路塊上,正負電源之間添加去耦電容器,使其能長時間穩定工作。
3個月運行情況表明,上述安全措施與提高穩定性的措施發揮了有效的作用,未曾發現有不安全的隱患存在,也未曾發現有失穩的情況發生。
5 控制模塊中的程序
控制模塊中的程序由各功能塊組成,其中防抖動功能塊是我們反復調試反復修改,從而引起設計者與編程者最大注意的功能塊。
由于清潔系統的尺寸受現場空間條件的很大限制,交流電機與弱電線路不得不同處于一個狹小的空間內。又由于一些非技術性約束因素的存在,客觀上無法采取最嚴密的硬件措施來排除電機產生的電磁干擾。
通過實踐觀察到,電機上電啟動或斷電停轉瞬間的干擾嚴重。起初我們對此沒有充分的準備,因此,第一階段并未將程序防抖動功能考慮在內。
第二階段在實驗室調試的過程中,發現了問題的存在,從而在程序中加入了防抖動的功能塊,使電機啟停干擾的問題得到了解決。
第三階段調試在工廠車間的現場進行,固有電磁干擾和背景噪聲遠遠超過實驗室。對此,我們詳細計算了時間因素,在時間上允許的條件下,將監測一次提升為輪詢監測多次,同時將防抖動的屏蔽時間放長,由此,問題終于得到了解決。
具體的各階段防抖動的程序段如下:


在較長時間內的考驗防抖動性能(現場3個月的實際運行),未曾發生因電機啟停干擾而造成清潔系統運行失穩的問題。
6 結論
1)研制的擺桿鏈測試點清潔系統,經過3個月車間現場的運行,性能穩定,清潔效果滿足測試精度0.1mm的要求。
2)結合工廠運作的實踐,硬件上設計成控制系統內含的而功能上設計成獨立的總計時系統,從而實現了長期自動化在線清潔功能,且自動化清潔的周期調節方便、可靠。
3)提出了一種有效的計算方法,即:用相對性原理克服受力計算公式中積分常數無法確定的困難,并得到了良好的應用。
4)在周期性沖擊力的場合下,提出了用細長懸臂梁作為沖擊力減緩器的方法,并推導獲得了這種減緩器應力的一般計算公式。該式有兩部分:振動部分與恒力
【】【】部分。進一步,選擇合適的直徑,可以調節振動幅值與恒定力值之比,以適應各種場合之需。
5)通過推導,獲得了懸臂梁一端受集中力狀況下的剛度系數一般計算公式。
6)采用了克服車間現場中對電子線路干擾的一些有效措施。
7)提出了在空間狹窄的條件下,用軟件克服交流電機啟停過程產生干擾的措施,提供了具體的程序段,其有效性得到了實踐的驗證。
參考文獻:
[1] 高國琴,秦天,方志明.新型混聯式汽車電泳涂裝輸送機構多模型控制研究[J].制造業自動化,2015,37(6下):38-44.
[2] 劉水兵,李亞,李振亮.間斷式電泳涂裝工藝自動控制系統的研究[J].制造業自動化,2015,37(6下):130-133.
[3] 于東海,王媛.生產車間設備維修成本預算研究[J].機械設計與研究,2013,29(5):42-44.
[4] 楊海波.懸掛式推桿鏈輸送機吊具取電方式的改進[J].汽車工藝與材料,2009,6:32-33
[5] 邱昌勝.擺桿輸送系統在涂裝生產線上的設計應用[J].現代涂料與涂裝,2013,4:45-49.
[6] 孫自松,許能才,李建國,萬德俊,申標. Rodip系統在涂裝電泳線上的應用[J].汽車工藝與材料,2013,8:61-64.
[7] 葛緒坤,劉大維,朱龍龍.剛柔耦合的自卸汽車舉升機構動力學分析[J].機械設計與研究,2014,30(3):45-47.
[8] 單輝祖.材料力學(I)[M].3版.北京:高等教育出版社,2009,2:205.
[9] 上海大學數學系,高等數學(下冊)[M].北京:高等教育出版社,2011,12:379.
[10] 單輝祖.材料力學(II)[M].3版.北京:高等教育出版社,2009,2:118-120.
[11] 吳宗澤.機械設計使用手冊[M].北京:化學工業出版社,2001,5:325.
Research on automatic on-line cleaning system for pendulum chains’ test
WU Kai-wen
中圖分類號:V249.122+.9
文獻標識碼:A
文章編號:1009-0134(2016)05-0086-05
收稿日期:2015-11-18
作者簡介:吳愷聞(1992 -),男,上海人,本科,研究方向為機械工程與自動化。