基于PID控制的電動汽車充電系統智能斷電設計
2016-07-05 01:27:10劉大龍
電力與能源 2016年1期
劉大龍
(廣東工業大學華立學院 機電與信息工程學部,廣東 增城 511325)
基于PID控制的電動汽車充電系統智能斷電設計
劉大龍
(廣東工業大學華立學院 機電與信息工程學部,廣東 增城511325)
摘要:通過對電動汽車充電系統的智能斷電設計可以為充電汽車提供安全保護的同時還能節約電力能源,傳統的充電斷電設計采用互感耦合I/O中斷控制方法,當充電線圈電磁分布出現脈沖干擾時,斷電實時性不好。提出一種基于PID控制的電動汽車充電系統智能斷電控制算法并進行系統硬件設計。首先進行了電動汽車的充電系統電能傳輸原理和結構分析,電動汽車的充電磁共振模式采用平面線圈構建,通過兩個線圈進行電磁感耦合,得到電動汽車的電磁場3D分布圖。在此基礎上進行了斷電控制算法的PID神經網絡算法設計,硬件電路設計主要包括了電動車斷電的傳感器模塊設計、動態增益控制模塊設計、復位電路設計、PCI總線設計和A/D轉換電路設計等,實現硬件電路設計。系統測試結果表明,采用該系統進行電動汽車充電系統的智能斷電控制,初級側電流和逆變器的輸出電壓在軸向偏移下具有較好的負載過載反應能力,斷電控制準確性較好,性能優越。
關鍵詞:PID控制;電動汽車;充電系統;智能斷電
電動汽車是采用交流電充電作為能源的一種新型交通工具,電動汽車具有環保節能的優點,將成為未來汽車的動力發展的一個新方向,電動汽車的智能充電問題成為制約電動汽車發展的一個關鍵瓶頸技術,必須通過改進和普及電動汽車的充電系統,才能有效促進電動汽車產業的發展。在電動汽車充電系統設計中,電動汽車充電系統的智能斷電裝置設計可以為充電汽車提供安全保護的同時還能節約電力能源。研究電動汽車充電系統智能斷電設計方法具有重要意義[1]。
當前,對電動汽車的充電系統智能斷電控制設計方法主要采用基于模糊神經網絡控制的電動汽車的充電系統智能斷電控制方法,基于支持向量機控制的斷電控制方法,基于耦合系數互感電磁場控制的斷電控制方法等,但是傳統方法對充電系統斷電控制中會因為電磁場分布的脈沖干擾和互感耦合導致充電系統斷電出現誤差和失真,斷電控制性能不好[2-3]。對此,相關文獻進行了改進設計,文獻[4]提出一種基于智能斷電系統耦合控制的電動汽車充電系統設計方法,采用兩個DC-DC電源轉換模塊進行了電動汽車的智能斷電控制信號的射頻識別,采用RFID技術提高了系統的可靠性,但是該系統的計算開銷較大,系統穩定性不好[5-8]。針對這些問題,提出一種基于PID控制的電動汽車充電系統智能斷電控制算法并進行系統硬件設計。首先進行了電動汽車的充電系統電能傳輸原理和結構分析,在此基礎上進行了斷電控制算法的PID神經網絡算法設計,最后進行了智能斷電系統的電路設計,通過仿真實驗進行了性能驗證,展示了算法在實現電動汽車充電系統智能斷電控制中的優越性能,得出有效性結論。
1電動汽車充電系統的原理和結構模型
電動汽車采用感應電能進行充電和斷電,在進行電動汽車智能斷電系統設計之前,首先分析電動汽車充電系統的原理,電動汽車充電示意圖如圖1所示。
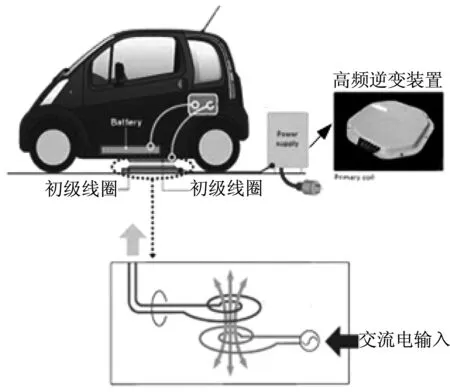
圖1 電動汽車充電系統示意圖
電動汽車采用超導永磁電機進行直流充電,電機模型電流矢量特征方程為:
(1)
式中L11,L22——接收端的電感值和電磁繞阻自感;
M——互感值;
v1,v2——線圈序列磁共振的輸入電壓和輸出電壓;
ψ1和ψ2——共振頻率和磁鏈。
電動汽車充電系統的耦合系數定義為:
(2)
電動汽車的充電磁共振模式采用平面線圈構建,通過兩個線圈進行電磁感耦合,得到電動汽車的電磁場3D分布如圖2所示。
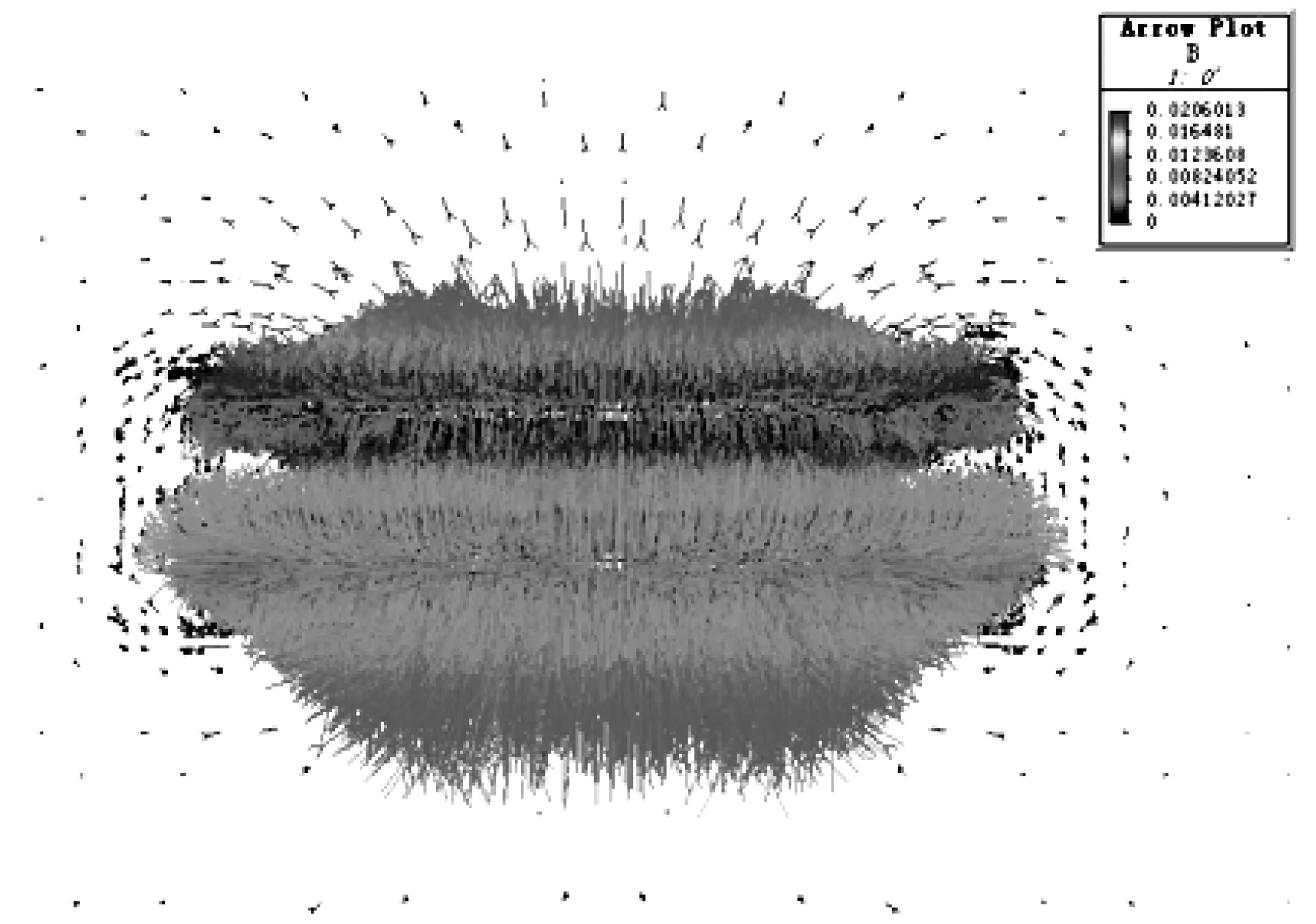
圖2 電動汽車充電線圈磁場分布3D結構
圖2中,電動汽車充電線圈采用半橋LLC諧振電路建立包含初級側的變壓器模型,當電流矢量誤差超出充電線圈磁場分布范圍內,通過Neumann方法進行誤差補償,得到充電系統的電勢感應特征信息代價方程為:
Lx=(1-k2)L11
(3)
Lmx=k2L11
(4)
(5)
式中:μ0=4π×10-1。
通過這些設計,使得電動汽車充電系統的拓撲結構比較固定,具有可靠的供電輸出。通過上述分析,電動汽車充電過程簡要描述如圖3所示。

圖3 電動汽車充電過程
2基于PID控制的電動汽車充電系統控制算法設計
在進行了電動汽車充電原理描述和系統總體結構設計的基礎上,進行斷電控制算法設計,電動車充電系統的智能斷電控制是保證充電系統安全的基礎,在過載和滿電等情況下實現智能斷電,提高安全性能的同時節約能源開銷。提出一種基于PID控制的電動汽車充電系統智能斷電控制算法,接收器通過PID控制計算得出電機系統在時刻的電勢差信息:
(6)
(7)
在時間t,在電勢過負荷的情況下在觀測參考時間m(1.2.3…n)的無線電能傳輸電流有效值計算公式為:
(8)
采用并聯電容方式結合PID模糊神經網絡控制方法,得到共振線圈的電磁場特征用Am0Bm0Cm0表示,負載為R0上電流有效值的偏移坐標用△Am,△Bm,△Cm表示,該電動車斷電的三維控制方程公式為:
(9)
線圈序列在磁共振模式下同時向斷電系統終端發送控制指令時,壓縮碼傳輸完成識別定位實現電動車充電系統的智能斷電。
3系統硬件設計與實現
結合上述系統總體設計模型和控制算法,進行基于PID控制的電動汽車充電系統智能斷電設計,硬件設計主要包括了電動車斷電的傳感器模塊設計、動態增益控制模塊設計和復位電路設計以及PCI總線設計和A/D轉換電路設計等,電動車斷電系統中所使用的拓撲結構如圖4所示。
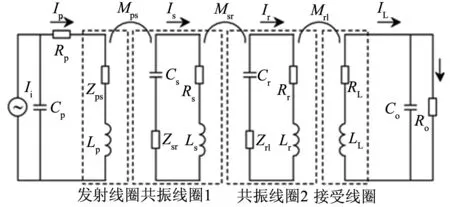
圖4 電動車充電系統斷電控制的線圈控制結構
圖4中,磁共振電能傳輸下電動車充電系統斷電控制線圈1電流有效值為Is,不同的激勵方式下的斷電系統共振線圈2上電流有效值Ir、充電汽車的負載電阻Ro上電流控制的有效輸出Io,計算結果分別為:
(10)
(11)
(12)
采用SRAM構建智能斷電系統的ARM主控模塊,得到斷電系統主控電路的輸出功率為:
(13)
采用遠程模塊化平臺控制方法進行斷電閾值的門限檢測,斷電系統在最大功率的補償電壓輸出和互感值為:
(14)
根據計算結果,采用ADUM1201和PCA82C250設計電動車斷電系統的動態增益控制模塊,在動態增益控制中,次級側輸出電壓流過Lmx的電流為:
(15)
構建半橋LLC諧振逆變器用于存放智能斷電控制芯片DSP的加載數據,復位電路采用分立元件構成,OUT變高,復位撤除,得到智能斷電系統的動態增益控制電路如圖5所示。

圖5 智能斷電系統的動態增益控制電路
圖5中,當電源VCC上電時,單片P監控ADM706的輸出增益,在電動汽車充電中的上電、掉電以及降壓情況下進行智能斷電,設計AD5545電流電壓轉換電路實現過載保護,電流電壓轉換電路如圖6所示。
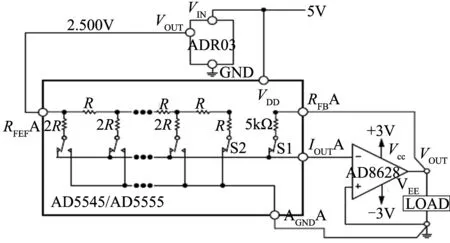
圖6 電流電壓轉換電路
圖6中,電動車智能斷電系統的接口采用簡單的3線制接口,采用AD780產生電壓3.5V的基準,Vout管腳和模擬地之間加10和0.1的去藕電容,由此實現了電動汽車智能斷電系統的模塊化設計,得到斷電系統的集成電路設計結果如圖7所示。
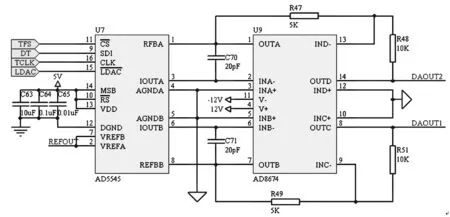
圖7 集成電路設計結果
4仿真實驗與性能測試
為了驗證本文設計的基于PID控制的電動汽車充電系統智能斷電控制系統的性能,進行仿真實驗,實驗中運放供電的+220V,調節的數字量ΔD=65 536×V/5,兩路D/A同時輸出最小值0V,開發AT25HP512進行PID控制算法的在線程序加載和讀寫,把本文設計的PID控制算法加載成Matlab文件燒寫到EEPROM中,配合AT25HP512的時序進行斷電控制和電動車充電的過載保護。采用INSTEKPST3202 可編程芯片進行混合示波器設計和控制輸出測量,上電檢查通過后,進行電動汽車充電過程中過壓保護的斷電功能測試,系統的各個元件參數設定見表1。

表1 電動汽車斷電控制系統各元件參數值
基于仿真環境和參數設計,進行電動汽車斷電控制仿真,得到電動汽車充電系統智能斷電控制的輸出電流和電壓變量時域變化圖如圖8和圖9所示。
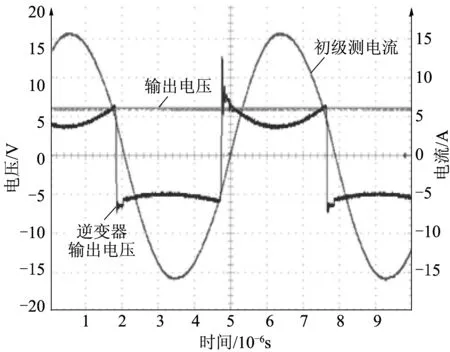
圖8 輸出電壓過載下斷電控制結果
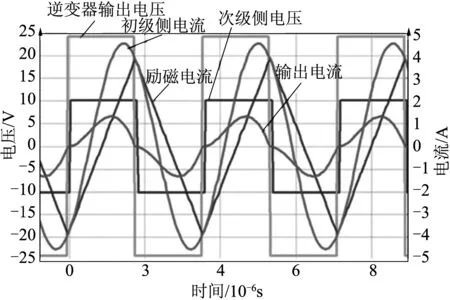
圖9 輸出電流過載時斷電控制結果
從圖8和圖9可見,采用本文方法進行電動汽車充電系統的智能斷電控制,初級側電流和逆變器的輸出電壓在軸向偏移下具有較好的負載過載反應能力,斷電控制準確性較好,性能優越。
5結語
通過對電動汽車充電系統的智能斷電設計可以為充電汽車提供安全保護的同時還能節約電力能源,傳統的充電斷電設計采用互感耦合I/O中斷控制方法,當充電線圈電磁分布出現脈沖干擾時,斷電實時性不好。提出一種基于PID控制的電動汽車充電系統智能斷電控制算法并進行系統硬件設計。首先進行了電動汽車的充電系統電能傳輸原理和結構分析,在此基礎上進行了斷電控制算法的PID神經網絡算法設計,最后進行了智能斷電系統的電路設計,通過仿真實驗進行了性能驗證,展示了本文算法在實現電動汽車充電系統智能斷電控制中的優越性能,實驗結果得出,采用本文設計的系統進行電動汽車充電系統的智能斷電控制,初級側電流和逆變器的輸出電壓在軸向偏移下具有較好的負載過載反應能力,斷電控制準確性較好,性能優越,具有較好的應用價值。
參考文獻:
[1]石鑫,周勇,甘新年,等.機載多源飛行數據資料的非線性檢驗[J].計算機與數字工程,2013,41(5):729-732.
SHIXin,ZHOUYong,GANXin-nian,etal.Testingnonlinearityinflightdataseriesofairbornemultiplesources[J].ComputerandDigitalEngineering,2013,41(5) :729-732.
[2]楊俊,周丙寅,張毅,等.基于遞歸圖分析的壓縮機故障診斷方法研究[J].計算機與數字工程,2013,41(6): 984-986.
YANGJun,ZHOUBing-yan,ZHANGYi,etal.Compressorfaultdiagnosisbasedonrecurrenceplotanalysis[J].ComputerandDigitalEngineering,2013,41(6):984-986.
[3]YUHai-qi,LIUZhen,TIANQuan-hui.ASpectralPredictionModelofPrinterBasedonRBFNeuralNetwork.ImagingScienceandPhotochemistry, 2015, 33(3): 238-243.
[4]PANJia-liang,XIONGZhi,WANGLi-na,EtalASimplifiedUKFAlgorithmforSINS/GPS/CNSIntegratedNavigationSysteminLaunchInertialCoordinateSystem[J].ActaArmamentarii,2015,36(3): 484-491.
[5]甄建軍,張毅.基于螺旋平面線圈的感應電能傳輸技術研究[J].電氣自動化,2014,36(2): 78-80.
ZHENJian-jun,ZHANGYi,HUGuang-bo.Researchoninductivepowertransmissiontechnologybasedonspiralplanarcoil[J].ElectricalAutomation,2014,36(2):78-80.
[6]孟銳.處理器中非阻塞cache技術的研究[J].電子設計工程,2015,(19):85-88.
MENGRui.Researchofthenon-blockingcachetechnologyinprocessor[J].ElectronicDesignEngineering,201 5,(19):85-88.
[7]龍雄輝.基于閾值降噪的行星傳動輪系特征故障診斷[J].科技通報,2014,30(8):73-76.
LONGXiong-hui.Faultdiagnosisofplanetarygearsystembasedonthresholdde-noising[J].BulletinofScienceandTechnology,2014,30(8):73-76.
[8]王磊,劉海濤,梁滔,等.低頻伺服力激勵下進給系統建模與動態響應分析[J].機械工程學報,2015,51(3): 80-86.
WANGLei,LIUHai-tao,LIANGTao,etal.Modelingandanalysisofdynamicresponseofservofeedsystemunderlowfrequencyexcitation[J].ChineseJournalofMechanicalEngineering, 2015(3):80-86
(本文編輯:趙艷粉)
Intelligent Power-off Design for Electric Vehicle Charging System Based on PID Control
LIU Da-long
(DepartmentofMechanicalandElectricalandInformationEngineering,HualiCollegeofGuangdongUniversityofTechnology,Zengcheng511325,China)
Abstract:The intelligent power-off design of electric vehicle (EV) charging system can provide the safety protection of the charging car and save power energy. The traditional design adopts the mutual inductance coupling I/O power-off control method, but has poor real-time power-off control performance in the event of pulse interference in charging coil electromagnetic distribution. This paper proposes an intelligent power-off control algorithm for EV charging system based on PID control and conducts the hardware design of the system. Firstly, the electric energy transmission principle and structure analysis of the EV charging system are carried out. The magnetic resonance mode of EV charging is constructed by using the planar coil. The electromagnetic 3D distribution of the EV is obtained by using two coils. Thereupon, the power control algorithm of PID neural network algorithm is designed, and hardware circuit design mainly includes the sensor module design of EV power, dynamic gain control module design, reset circuit design, PCI bus design and A/D converter circuit design. System test results show that this intelligent power-off control of EV charging system is superior in control accuracy and performance and the primary side current and the output voltage of the inverter has good overload response capability.
Key words:PID control; electric vehicle; charging system; intelligent power-off
DOI:10.11973/dlyny201601015
基金項目:2012年質量工程立項文件粵教高函[2012]204號
作者簡介:劉大龍(1976),男,碩士,實驗師,主要研究領域為電工電子技術和控制科學與技術。
中圖分類號:TP273
文獻標志碼:A
文章編號:2095-1256(2016)01-0070-05
收稿日期:2015-10-22
