變穩飛機飛行模擬中的相似性匹配技術
2016-07-01 01:10:27方威李德尚田福禮張景亭
飛行力學 2016年3期
方威, 李德尚, 田福禮, 張景亭
(1.中航工業飛行仿真航空科技重點實驗室, 陜西 西安 710089;2.中國人民解放軍 空軍試飛局, 陜西 西安 710089)
變穩飛機飛行模擬中的相似性匹配技術
方威1, 李德尚1, 田福禮1, 張景亭2
(1.中航工業飛行仿真航空科技重點實驗室, 陜西 西安 710089;2.中國人民解放軍 空軍試飛局, 陜西 西安 710089)
摘要:針對在空中飛行模擬中變穩飛機與模型飛機的差異導致模擬逼真度下降的問題,提出一種相似性匹配技術,使駕駛員感受到一個更為接近模型飛機響應的飛行動力學特性。從理論上研究相似匹配技術,推導出合適的模型狀態的轉換邏輯;將轉換邏輯加入到數值仿真試驗和人機閉環地面試驗中對其驗證。結果表明,通過采用相似性匹配技術和調節跟蹤參數值,整體跟蹤效果得到改善,模擬逼真度得到顯著提高。
關鍵詞:空中飛行模擬; 模型跟蹤; 相似性; 轉換邏輯; 模擬逼真度
0引言
空中飛行模擬是借助變穩飛機模擬另一架飛機在飛行中的動態響應特性,使駕駛員感覺是在操縱所要模擬的飛機,從而開展飛行品質等方面的研究。當飛行員駕駛變穩飛機時可以在真實飛行環境中感受被模擬飛機的運動狀態和飛行操縱品質,具有完全真實的視景、運動感覺、空間環境和飛行員心理狀態,從而保證駕駛員的操縱感覺的真實性和試驗結果的正確性[1],以獲得逼真的模擬效果。然而從工程應用角度分析,除非變穩飛機和被模擬飛機是同一種飛機,否則它們之間在性能品質上總會有區別,例如尺寸不同,在同一個高度上的配平速度不同,或者是配平姿態不同。在此類情況下,當駕駛員操縱變穩飛機進行飛行模擬時,這些固有的差異就會導致駕駛員的感覺(過載或外部視景)與在模型飛機上出現了一定的差別,因此提出了相似性匹配技術。相似性匹配是一種狀態轉換邏輯,即對模型狀態進行一系列計算,跟蹤轉換后的狀態,可使駕駛員的感受與在模型飛機上的感受一致[2],提高飛行模擬逼真度[3]。
國外對于相似性匹配技術的研究主要來源于TIFS的模擬應用。20世紀70年代,美國已制造出當時最先進的空中飛行模擬器TIFS,為保證駕駛員在TIFS中的感受與在要模擬的飛機中感受一致,工程師Reynolds[2]又對飛控系統的模型跟蹤控制律進行了設計,其中即包含相似性匹配技術的設計。20世紀70~80年代,中國飛行試驗研究院先后研制成功了BW-1型變穩試驗機和綜合空中飛行模擬試驗機IFSTA[4],并借助變穩飛機成功完成了多型號飛機的模擬進場著陸飛行試驗任務。從飛行試驗中可以看到,模擬跟蹤的參數包括俯仰角速度或俯仰角、滾轉角速度、偏航角速度,由于缺乏直接升力和直接側力的控制,使之沒有能力模擬迎角、過載等更多的飛行參數。所以整體上看,除了理論上對空中飛行模擬相似性理論的詳細介紹之外,在飛行試驗中受限于變穩飛機的模擬能力,并沒有緊密地結合相似性匹配技術進行模擬跟蹤試驗。因此,相似性匹配技術有待于深入分析研究和仿真驗證。
本文首次針對之前空中飛行模擬中存在的逼真度問題,開展相似性匹配技術方法的研究,具體解決變穩飛機與模型對象間的重心偏差和速度差異所導致的模擬“不像”等問題,并將此結果應用于模型跟蹤控制方法中,從而提高空中模擬逼真度。
1相似性匹配技術原理
相似性匹配技術依據空中飛行模擬運動學相似理論,研究變穩飛機與模型飛機的運動一致性問題。假定飛行員座位至各自飛機質心距離相同,若變穩飛機的運動方程組為:

(1)

(2)
則兩機運動的相似條件為:在相同初始條件X(t0)=Xm(t0)下,存在著保證t≥t0時,兩機狀態向量相等X(t)=Xm(t)的控制u(t)∈G,且在任何時候有:
(3)
式中:G和Gm為兩機可能的控制范圍;F和Fm為兩機可能的外擾動范圍。
以上為空中飛行模擬運動學相似性理論的基本數學模型。從理論推導來看,給出了兩個假設條件:一是假定飛行員座位至各自飛機質心距離相同;二是有相同初始狀態。
在實際空中飛行模擬中,變穩飛機與模型飛機尺寸上有差別,會造成飛行員座位至各自飛機質心距離不相同;另外,在同一高度上,兩機的配平速度或配平姿態可能不相等。當上述情況出現時,僅采用推導出的響應反饋法或模型跟蹤法來模擬模型飛機的特性是不夠的,或者模擬出來的特性是有差別的。如果要在變穩飛機中提供給駕駛員同樣的飛行感受,那么就需要實現模型飛機中能夠體驗到的同樣感知,即視覺感知和運動感知[5]。為此,本文提出一種相似性匹配技術,解決上述模擬“不像”的問題,提高模型跟蹤的逼真度,最終使駕駛員感受到與模型飛機一致的動態特性。
2相似性匹配技術方法研究
相似性匹配技術主要包含了狀態轉換的邏輯關系,在變穩飛機與被模擬飛機的重心位置偏差以及兩機不同的初始配平條件下,可以得到合適的模型狀態作為模型跟蹤系統的輸入。由于模型跟蹤技術比較成熟,而對于轉換邏輯尚未深入地分析,所以本文重點是借助于簡化模型及飛機飛行運動學的有關公式研究轉換邏輯,從角度失配轉換、重心偏差轉換和速度失配[6]轉換三方面進行論述。
2.1角度失配轉換
角度失配是指在初始配平條件下,變穩飛機的配平姿態角不等于模型飛機的配平姿態角,存在角度差,從而導致角度失配,因此需要重新確定出合適的模型狀態。通過模型飛機的Oxz坐標系旋轉來建立一個等同于變穩飛機的坐標系,如圖1所示。
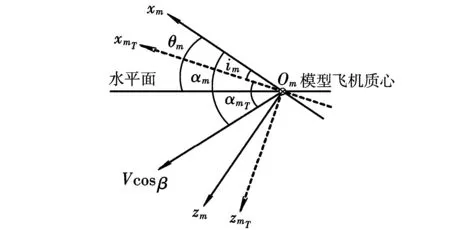
圖1 傾角失配示意圖Fig.1 Schematic diagram of bank angle mismatching
因此,將模型坐標系逆時針旋轉角度im,重合于變穩飛機坐標系。旋轉之后的模型狀態和初始模型坐標系間的關系如下:
(4)
式中:下標m代表模型飛機;mT代表坐標旋轉之后的模型飛機。
2.2重心差異下的轉換
重心差異是指模型飛機和變穩飛機的尺寸大小不一致的情況下,當保證變穩飛機的前艙飛行員位置與模型飛機的駕駛員位置重合時,會產生重心位置偏差。如圖2所示,在洗出失配角后,模型飛機的坐標系平行于變穩飛機坐標系。當兩機重心位置存在差異時,此時模型飛機解算出的狀態參數值并不是變穩飛機重心處的狀態參數值(如速度、過載等),不能直接作為模型跟蹤的輸入,需要將模型飛機的狀態參數進行轉換。
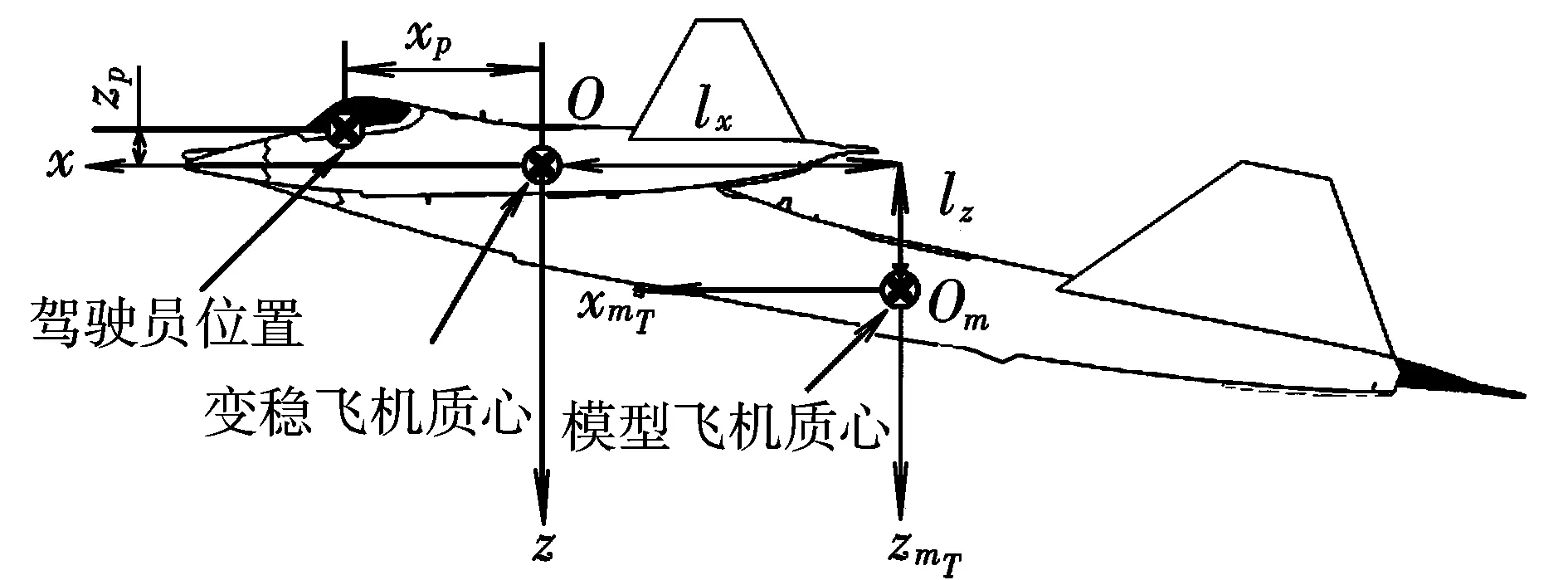
圖2 模型飛機與變穩飛機幾何關系Fig.2 Geometric relation between model aircraft and VSA
本文以過載為例介紹轉換公式的推導過程。定義過載為n=F/(mg)=a/g,F為包括重力在內的合力。由理論力學可知,剛體上距離軸心r處的一點,其加速度的分量形式如下[7]:
(5)
由以上加速度和過載關系可得:
(6)
離心加速度項作為高階因素忽略掉,解算向量差乘,可得z方向的過載分量為:
(7)
根據坐標變換公式及質心幾何關系,可得到速度和迎角轉換公式如下:
(8)
(9)
2.3速度失配條件下的轉換
速度失配是指在某個狀態點配平完成后,變穩飛機的速度不等于模型飛機的速度。通過文獻[8]可得到過載的近似公式如下:
(10)
當存在速度失配時,即VOm≠VO,如果變穩飛機匹配上模型飛機的αp和q時,根據式(10)可知,Δnzp必然不能匹配上,沒有匹配上的參數稱為次要狀態。根據模擬飛行中所要匹配的主要狀態參數和次要狀態參數,可將速度失配分為3類,如表1所示。

表1 速度失配條件
本文以速度失配條件1為例推導轉換公式。假設變穩飛機和模型的匹配參數關系如下:
(11)
(12)
(13)
式中:Δnxp,Δnzp和q分別為變穩飛機駕駛員位置處的軸向增量過載、法向增量過載和俯仰角速度;ΔnxmTp,ΔnzmTp和qm分別為模型飛機駕駛員位置處的軸向增量過載、法向增量過載和俯仰角速度。由此可推導出變穩飛機駕駛員位置處的狀態與模型飛機駕駛員位置處的狀態之間的關系如下:
(14)
(15)
將式(8)和式(9)分別帶入式(14)和式(15),得到:
(16)
(17)
式(16)和式(17)即為變穩飛機重心和模型飛機重心參數間的關系式。假設k1=k2=k3=1,可知兩機重心處的速度是相等的,而迎角并不相等,與兩機的初始配平速度的比值有關系。所有速度失配條件狀態參數的一般化格式如下:
(18)
(19)
(20)
(21)
(22)
(23)
3數值仿真
仿真試驗均為飛機縱向狀態參數模擬,采用模型跟蹤法,試驗內容包括重心差異條件下的縱向跟蹤和速度失配條件1~3下的縱向跟蹤。本文僅以速度失配條件2為例進行分析。
(1)加入相似匹配技術前后跟蹤過載對比
模型和本機狀態點相同,高度為1 000 m,馬赫數為0.27;縱向推桿15 mm,選取跟蹤參數nz,跟蹤過載對比曲線如圖3所示。

圖3 加入相似匹配技術前后的過載跟蹤Fig.3 Overload tracking before and after adding similarity matching technology
可以看出,圖3(a)中駕駛員處法向過載在初始時刻有明顯差異,變穩飛機的駕駛員處過載值為模型飛機駕駛員處過載值的一半,所以在空中模擬時駕駛員會感覺到過載偏小;圖3(b)中兩機駕駛員處法向過載曲線重合,因此駕駛員感受到的過載與在模型飛機上是一致的。
(2)縱向跟蹤對比
模型飛機狀態點為高度1 000 m,馬赫數0.27;變穩機狀態點為高度1 000 m,馬赫數0.23;縱向推桿15 mm,選取參數q和α進行縱向跟蹤,結果如圖4所示。

圖4 縱向跟蹤結果Fig.4 Results of longitudinal tracking
當跟蹤q和α時,為滿足n/α=20,可得到k值范圍為0.814 8~1.000 0,隨著k值下調至0.888 9,在法向過載跟蹤可以接受的情況下迎角跟蹤變好,從而提高了整體跟蹤效果。
4人機閉環地面試驗
人機閉環地面試驗為實際工程應用的表現,試驗系統結構如圖5所示。人機閉環地面試驗系統包括舵機、駕駛桿等實物,動力學仿真過程采用精確定時控制,整個試驗系統具備實時性。相比于數值仿真,本文試驗系統更接近于實際飛行環境。
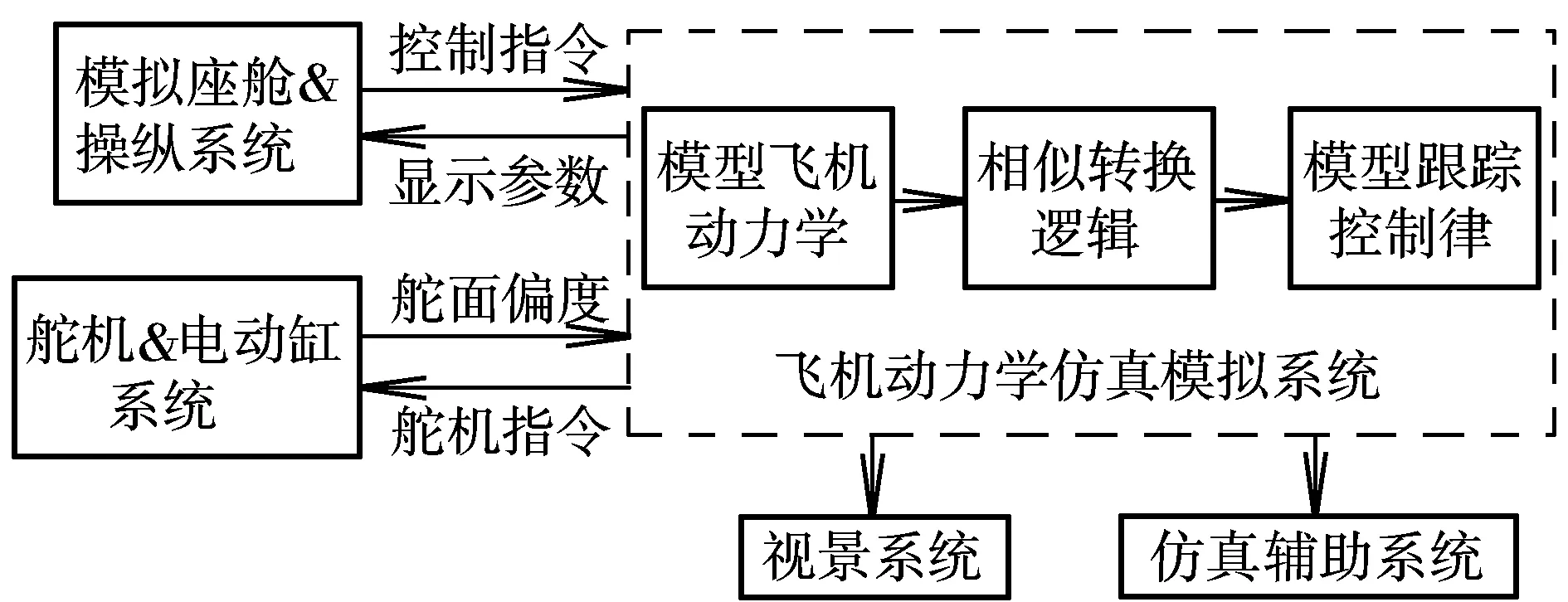
圖5 人機閉環系統結構Fig.5 Human-machine closed-loop system structure
人機閉環仿真試驗僅選取進場著陸階段的飛行模擬為例說明跟蹤結果。在速度失配條件下,選取跟蹤參數q和nz為主跟蹤變量,模型飛機高度為1 000 m,馬赫數為0.27;變穩飛機高度為500 m,馬赫數為0.23。變穩飛機配平后由前艙駕駛桿進行縱向操縱,跟蹤結果如圖6所示。
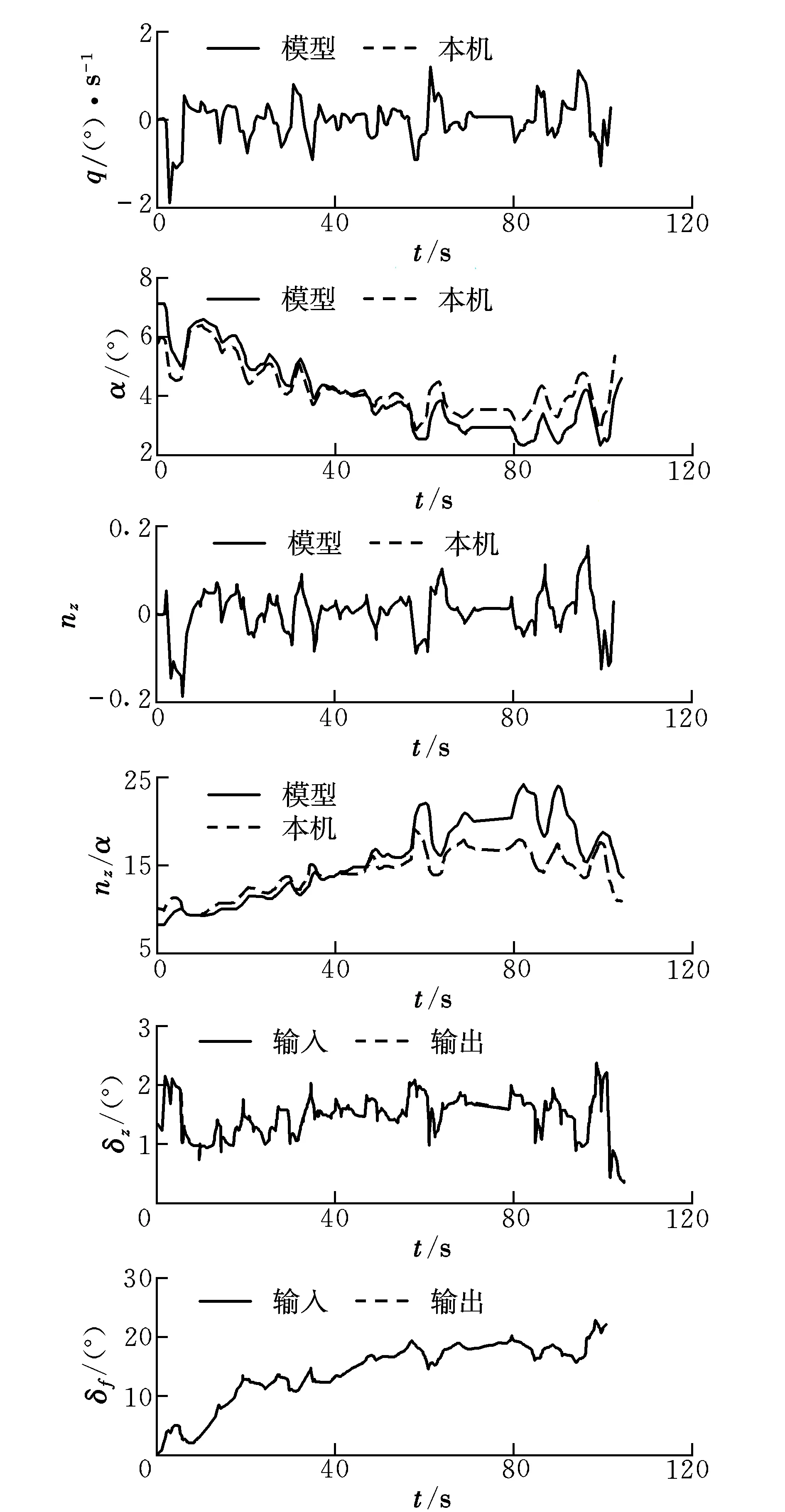
圖6 進場著陸階段跟蹤結果Fig.6 Tracking results of approaching phase
試驗中,要求升降舵偏度限制在-30°~18°,襟翼偏度限制在-35°~35°。由仿真結果可見,升降舵機和襟翼舵機工作在正常范圍內,俯仰角速度和駕駛員處法向過載跟蹤很好,駕駛員處迎角在60 s后迎角偏差變大,最大誤差接近1°,但整體變化趨勢仍然保持一致。
5結束語
空中飛機模擬以運動學相似理論為基礎,該理論提出了兩個假設條件,即變穩飛機和模型飛機的尺寸近似,初始配平狀態一致,但工程實際上往往是要考慮到這兩個假設條件,才能達到逼真的模擬,使駕駛員感受到模型飛機的正確的動態響應特性。基于此,本文研究相似匹配技術方法,通過數值仿真以及人機閉環地面試驗驗證。結果表明,通過調節不同k值,可同時滿足駕駛員處的過載、迎角等參數有很好的跟蹤效果,從而提高了模擬逼真度。
參考文獻:
[1]王素靜,章伯定.飛行模擬器逼真度與飛行試驗[J].飛行力學,1998,16(2):19-23.
[2]Reynolds P A.Recent uses of in-flight simulation[R].AIAA-83-2171,1983.
[3]王遠達,宋筆鋒,李小奇,等.飛行模擬器逼真度的實用評價方法[J].海軍工程大學學報,2005,17(6):53-57.
[4]劉興堂,呂杰,周自全.空中飛行模擬器[M].北京:國防工業出版社,2003:175-176.
[5]Allerton D.飛行仿真原理[M].劉興科,譯.北京:電子工業出版社,2013.
[6]Reynolds P A.Drive logic for in-flight simulations[R].AIAA-73-0933,1973.
[7]哈爾濱工業大學理論力學教研室.理論力學[M].北京:高等教育出版社,2002:156-160.
[8]郭鎖鳳,申功璋,吳成富.先進飛機飛行控制系統[M].北京:國防工業出版社,2003:255-256.
(編輯:李怡)
Similarity matching technology in VSA flight simulation
FANG Wei1, LI De-shang1, TIAN Fu-li1, ZHANG Jing-ting2
(1.AVIC Aeronautical Science and Technology Key Laboratory of Flight Simulation,Xi’an 710089, China;2.Air Force Flight Test Bureau of the PLA, Xi’an 710089, China)
Abstract:For the problem of decreasing the simulation fidelity which caused by differences between variable stability aircraft (VSA) and model aircraft in the air flight simulation, a method of similarity matching technology was proposed to make the pilot could feel a flight dynamic characteristic closer to the model aircraft response. The similarity matching technology was theoretically studied, and the appropriate transformation logic of model states was derived; and the transformation logic was verified in the numerical simulation tests and human-machine closed-loop ground simulation tests. The results show that, by using similarity matching technology and adjusting these tracking parameters, the overall tracking effect is improved, and the simulation fidelity is enhanced greatly.
Key words:in-flight simulation; model tracking; similarity; transformation logic; simulation fidelity
收稿日期:2015-08-25;
修訂日期:2016-02-18; 網絡出版時間:2016-02-29 16:37
作者簡介:方威(1983-),男,江蘇徐州人,工程師,主要從事飛行控制、無人機數據鏈路通信研究以及地面飛行模擬器研制等。
中圖分類號:V212
文獻標識碼:A
文章編號:1002-0853(2016)03-0081-05