基于綜合識別的高速飛行器在線姿態控制方法
2016-07-01 01:10:11王立祺周軍林鵬
飛行力學 2016年3期
王立祺, 周軍, 林鵬
(西北工業大學 精確制導與控制研究所, 陜西 西安 710072)
基于綜合識別的高速飛行器在線姿態控制方法
王立祺, 周軍, 林鵬
(西北工業大學 精確制導與控制研究所, 陜西 西安 710072)
摘要:針對高速飛行器控制方法中控制模型難以適應大包絡飛行和算法中辨識存在收斂性的問題,設計了一種基于綜合識別的在線控制方案。首先,由在線直接可測量構成三通道的特征狀態量,以特征狀態量建立面向控制的特征模型;然后,通過反饋線性化進行通道間的解耦,采用極點配置來進行在線控制參數的實時調節。仿真結果表明,在氣動參數拉偏的情況下,三個通道均取得了較好的控制效果,控制器具有快速性和魯棒性,且易于工程實現。
關鍵詞:高速飛行器; 綜合識別; 特征狀態量; 在線控制; 反饋線性化
0引言
高速飛行器一般是指飛行馬赫數大于5的飛行器。由于其高速度、大包絡的飛行特性,因此姿態控制系統面臨著變參數、快速響應、強魯棒性、高效控制等問題[1-3]。在進行其姿態控制系統設計時,如何建立可描述飛行器瞬時動態特性的控制模型,同時又能避免復雜的控制器結構是極具挑戰性的工作。
文獻[4-5]利用線性變參數方法設計了一種新的增益調度控制系統。通過實時估計系統參數變化,體現系統的時變特性,取得了較好的控制效果。但是隨著飛行包線范圍的擴大,系統的時變參數范圍隨之變大,使得原有設計包線內單一的線性變參數控制器不能適應飛行器飛行狀態大范圍變化的需求,控制性能變得很差,甚至無法求得控制器參數。文獻[6-7]基于特征建模的思想,把原非線性動力學方程用一個二階時變差分方程組形式的特征模型描述,然后通過辨識模型參數后設計自適應姿態控制器。該方法控制模型簡單,易于實現,但其參數辨識存在收斂性等問題,難以實現高超聲速飛行器控制器快速響應的性能要求。
針對高速飛行器控制系統設計的上述問題,本文重點研究了一種基于綜合識別方法的高速飛行器姿態控制方案。首先以飛行器運動狀態在線直接可測量的參數構成特征模型的特征狀態量,進一步獲得俯仰、偏航和滾轉三個通道面向控制的數學模型;然后通過反饋線性化進行通道間的解耦后,由獲得的特征狀態量在線調配對象系統的極點來輸出達到期望性能所需要的控制器控制參數。仿真結果驗證了本文方法的有效性。
1建立高速飛行器動力學模型及特征
模型
1.1高速飛行器動力學模型
基于文獻[8],本文所研究的高速飛行器的氣動結構參考Winged-Cone模型,主要研究飛行器在再入平飛段的姿態控制器設計問題。
采用“固化原理”可以把所研究的瞬時變質量系的飛行器動力學和運動學基本方程寫成常質量剛體的形式,得到高速飛行器運動的矢量方程如下:
(1)
(2)
(3)
(4)
式中:m為質量;V為速度;Ω為彈道坐標系相對地面坐標系的轉動角速度;F為作用在飛行器上的外力之和;ωe為地球自轉角速度;r為質心在慣性坐標系中的位置矢量;J為慣性張量;ωT為彈體坐標系相對平移坐標系的轉動角速度矢量;M為作用在彈體上的合外力力矩;x為飛行器的質心位移;?T,ψT,γT為平移坐標系按3-2-1的順序旋轉到彈體坐標系的歐拉角。
1.2面向控制的特征模型
高速飛行器的姿態控制系統,通常選取迎角、側滑角和傾側角作為俯仰、偏航和滾動通道的控制量。現以俯仰通道為例進行該通道的特征模型的推導。
(1)建立氣動角的角運動方程。根據坐標系之間姿態角關系的定義,以及旋轉角速度之間的等價關系,可以得到兩個矢量表達式:
(5)
(6)
把式(5)和式(6)展開后代入姿態運動學方程式(4)中,整理可得到面向控制的俯仰通道的氣動角微分方程:
(7)
(2)將地球自轉角速度和飛行器姿態運動方程進行分離,得到:
(8)
(3)考慮本飛行器處于再入平飛段,因此認為長周期運動參數為常量,忽略其各階導數,進一步得到飛行器姿態運動方程為:
(9)
(4)在特定的飛行條件下,飛行器主要運動都在縱向平面內進行,因此,認為側向運動為小量,忽略俯仰通道中側向運動的小量,可得:
(10)
(5)建立標稱運動方程。加入姿態方程式(2),并對力矩進行展開,忽略氣動非線性項,得到:
(11)
式中:fz為俯仰通道的擾動項。

(12)

1.3三通道特征模型及特征狀態量
根據得到的高速飛行器特征模型(式(12)),定義其俯仰通道的特征狀態量為:
(13)
式中:ap2為穩定力矩與實際迎角的比值,代表單位迎角產生角加速度的能力;bp為操縱力矩與實際舵偏的比值,代表單位舵偏產生角加速度的能力。
此時,俯仰通道的特征模型進一步變為:
(14)
所提出的特征模型希望利用可測量物理量來表征飛行器的動態特性,將主要作用因素之間的關系模型用作飛行器姿態運動的近似模型,并作為控制器設計的依據。耦合情況的三通道特征模型寫作如下形式:
(15)
按照通道進行劃分,俯仰通道三個特征參數為ap1,ap2和bp,偏航通道三個特征參數為ay1,ay2和by,滾轉通道三個特征參數為ar1,ar2和br。
2綜合識別方法
本文采用一種基于傳感器測量的特征狀態量在線快速綜合識別方法,其主要思想是利用傳感器對系統高階姿態的測量代替傳統的基于統計學原理的參數辨識方法,用增加傳感器種類和數量來獲得特征狀態量在線估值速度的提升。該方法的流程如圖1所示。
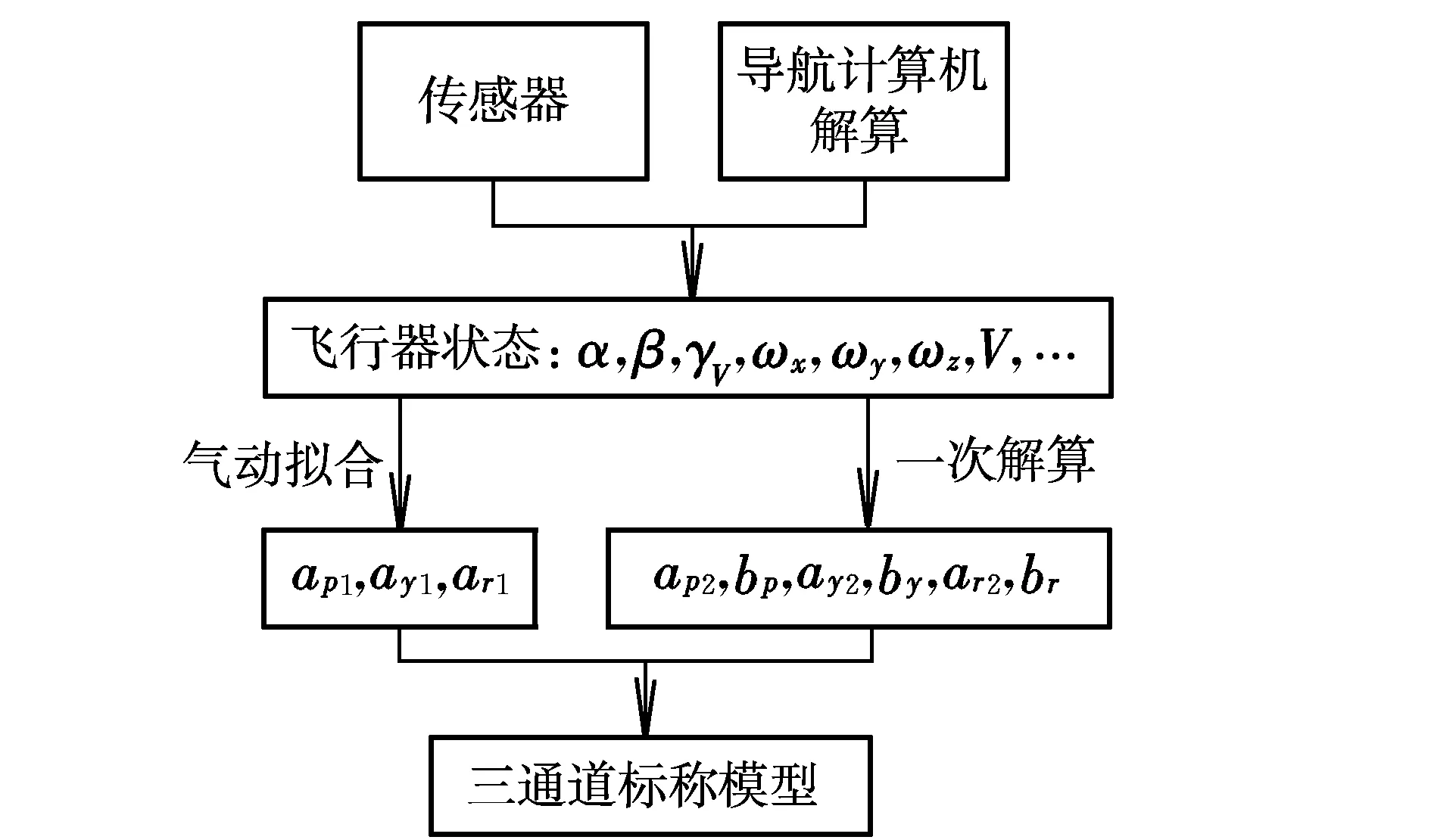
圖1 綜合識別方法流程Fig.1 Process of integrated identification method
具體步驟如下(以俯仰通道為例):
(2)計算ap1。ap1由阻尼力矩系數計算,而阻尼力矩系數可由氣動擬合公式進行計算:

進一步整理可得:
在采樣周期足夠小的情況下,認為參數ap2,bp的變化可忽略不計,從而得到配平系數表達式如下:
(4)用配平系數估值來計算特征狀態量:
由此,便得到了特征模型的全部特征狀態量。偏航通道和滾轉通道同理。
3基于綜合識別方法的在線控制器

其中:
對e1,e2,e3和f1,f2,f3分別進行一次求導,有:
bxδxcosαsecβ-byδysinαsecβ-
定義系數陣:
則有:
選擇控制律:
式中:K1,K2為參數陣;v為指令輸入。
則有非線性反饋后解耦線性化方程:
根據所期望的閉環系統性能設計K1,K2。
4數值仿真結果及分析

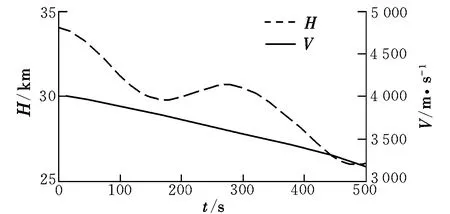
圖2 高度和速度曲線 Fig.2 Curves of height and velocity
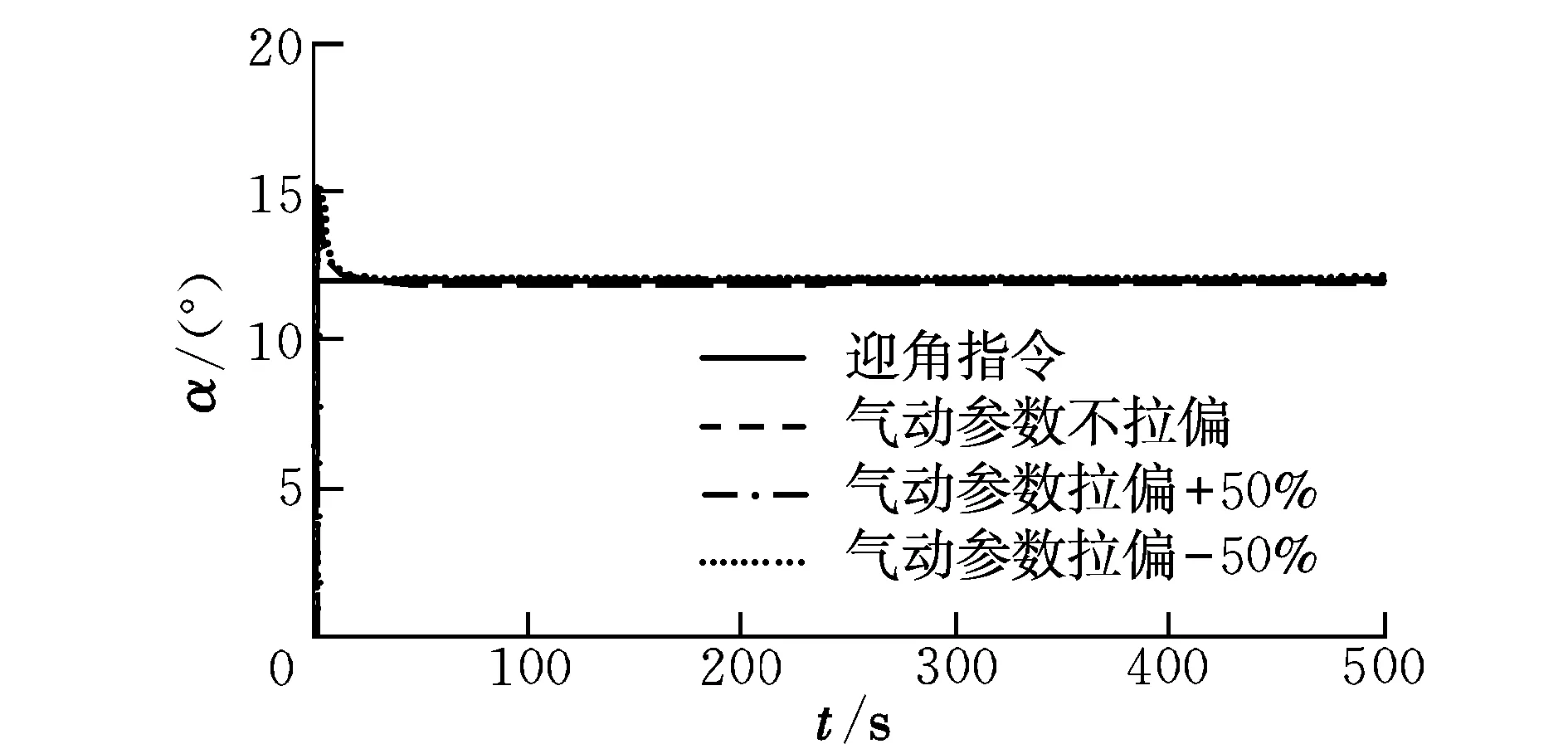
圖3 迎角曲線 Fig.3 Curves of angle of attack
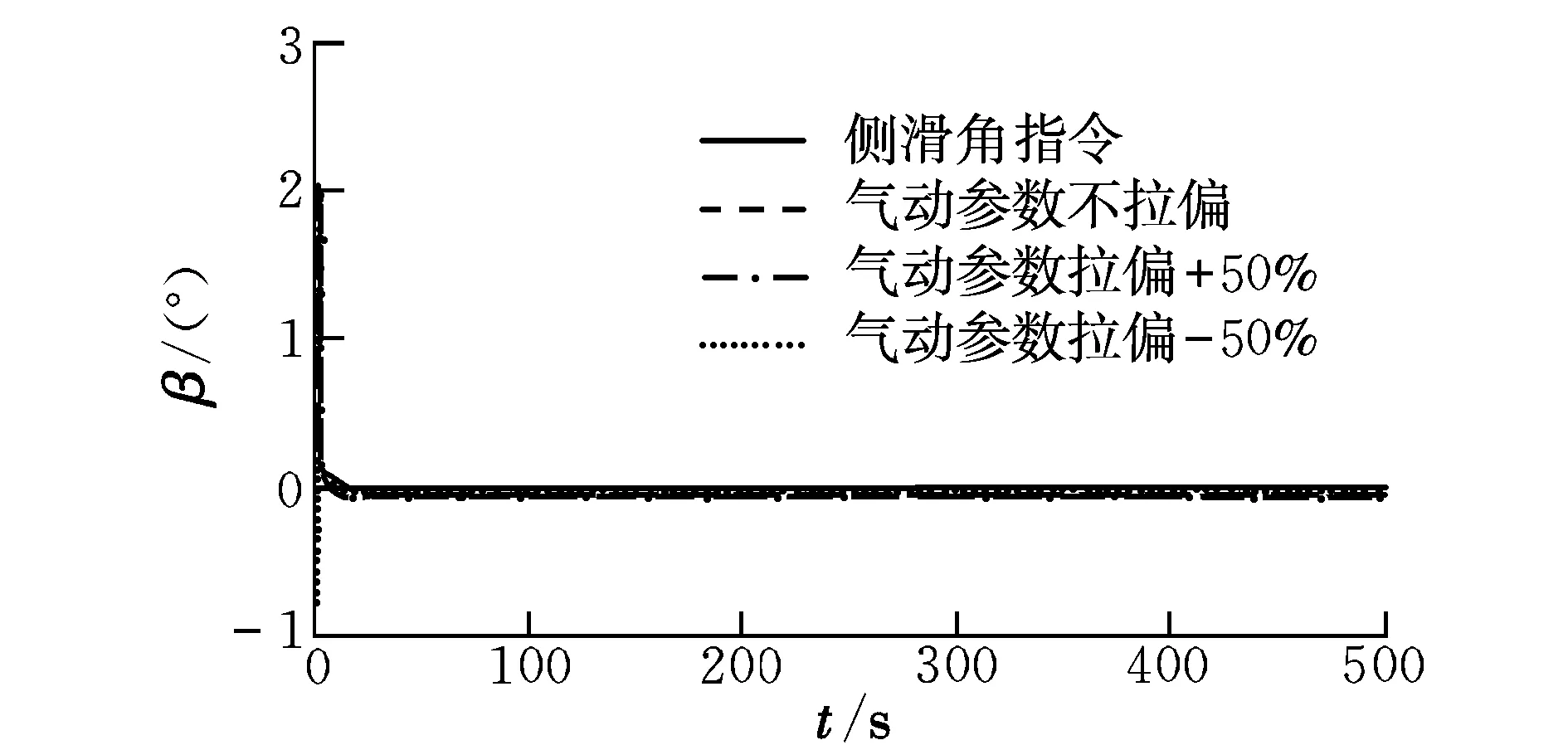
圖4 側滑角曲線Fig.4 Curves of sideslip angle
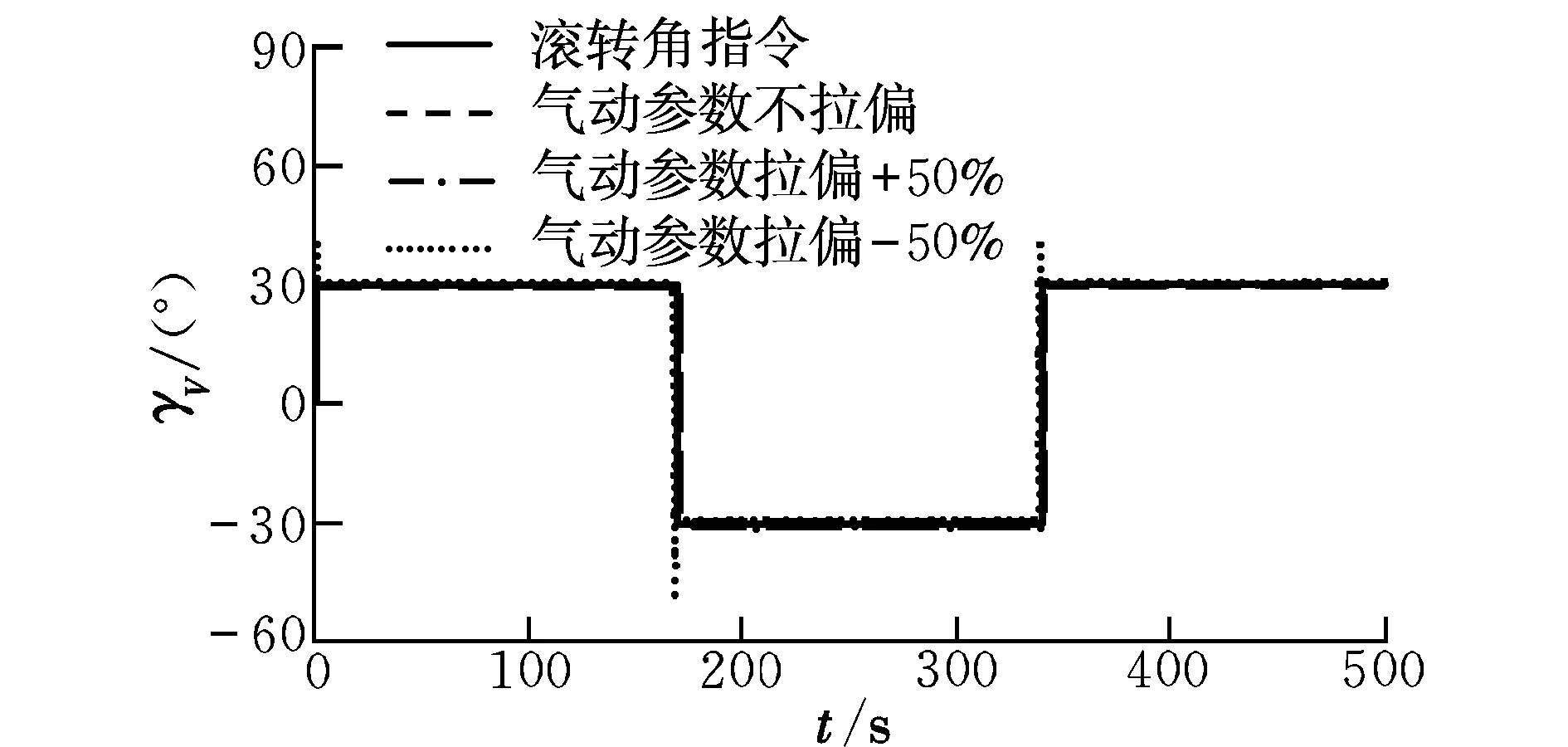
圖5 滾轉角曲線Fig.5 Curves of roll angle
從仿真結果可以看出,控制系統在不同的氣動拉偏強度下,迎角、側滑角和滾轉角均能較好地跟蹤指令信號,控制系統具有令人滿意的控制性能。
5結束語
針對高速飛行器控制中控制模型難以適應大包絡飛行、算法中辨識存在收斂性的問題,本文提出了基于綜合識別方法的自適應控制方案,為高速飛行器的在線控制提供了一個有益的探索,也為該類飛行器自適應控制的實現提供了思路。該控制系統中參考模型的特征狀態量通過在線直接可測量的組合可快速獲得,避免了辨識方法迭代速度慢和存在收斂性的問題。通過反饋線性化的方法進行三通道間的解耦后,由極點配置來進行控制參數的輸出。所建立的面向控制模型可實時反應飛行器的飛行狀態,控制算法簡單、快捷,控制器可靠且易于工程實現。
參考文獻:
[1]崔爾杰.近空間飛行器研究發展現狀及關鍵技術問題[J].力學進展,2009,39(6):658-673.
[2]吳宏鑫,孟斌.高超聲速飛行器控制研究綜述[J].力學進展,2009,39(6):756-765.
[3]方洋旺,柴棟,毛東輝,等.吸氣式高超聲速飛行器制導與控制研究現狀及發展趨勢[J].航空學報,2014,35(7):1776-1786.
[4]Fezans N,Alazard D,Imbert N,et al.Robust LPV control design for a RLV during reentry[R].AIAA-2010-8194,2010.
[5]Lu B,Wu F,Kim S.Switching LPV control of an F-16 aircraft via controller state reset[J].IEEE Transactions on Control Systems Technology,2006,14(2):267-277.
[6]王勇.特征模型分散式自適應姿態控制在高超聲速飛行器中的應用[J].宇航學報,2012,33(10):1413-1421.
[7]龔宇蓮,吳宏鑫.基于特征模型的高超聲速飛行器的自適應姿態控制[J].宇航學報,2010,31(9):2122-2128.
[8]Shaughnessy J D,Pinckney S Z,Mcminn J D,et al.Hypersonic vehicle simulation model:winged-cone configuration[R].NSAS TM-102610,1990.
(編輯:姚妙慧)
Online attitude control for hypersonic vehicle based on integrated identification
WANG Li-qi, ZHOU Jun, LIN Peng
(Institute of Precision Guidance and Control, NWPU, Xi’an 710072, China)
Abstract:Since high speed vehicle’s traditional control method have large envelope flight and identification convergence, an online control method based on integrated identification was proposed. Firstly, online measurable quantities constituted characteristic state variables of the three-channels, which were used to build control-oriented characteristic model. Secondly, through feedback linearization decoupling between channels, use the pole placement for on-line control parameters in real time adjustment. Simulation results show that all the 3 channels are well controlled, and the controller is has a higher speed and robustness, which facilitates the engineering implementation in the case of aerodynamic parameter deviation.
Key words:hypersonic vehicle; integrated identification; characteristic state variables; online control; feedback linearization
收稿日期:2015-10-14;
修訂日期:2016-01-28; 網絡出版時間:2016-03-09 15:00
基金項目:高等學校博士學科點專項基金資助(20106102120008)
作者簡介:王立祺(1985-),男,安徽涇縣人,博士,研究方向為導航、制導與控制。
中圖分類號:V448.2
文獻標識碼:A
文章編號:1002-0853(2016)03-0067-05