一種適用于戰(zhàn)術(shù)網(wǎng)絡(luò)的組移動模型*
2016-07-01 09:58:33賴榮煊
通信技術(shù) 2016年2期
李 寧,蔣 媛,賴榮煊,韓 序
(解放軍理工大學(xué) 通信工程學(xué)院,江蘇 南京 210007)
?
一種適用于戰(zhàn)術(shù)網(wǎng)絡(luò)的組移動模型*
李寧,蔣媛,賴榮煊,韓序
(解放軍理工大學(xué) 通信工程學(xué)院,江蘇 南京 210007)
摘要:節(jié)點移動模型在ad hoc網(wǎng)絡(luò)研究中起了極為關(guān)鍵的作用,在仿真過程中,移動模型直接影響路由協(xié)議的各項性能。特別是在研究特殊環(huán)境下的ad hoc網(wǎng)絡(luò)技術(shù)時,對移動模型的要求更為特殊,如戰(zhàn)術(shù)網(wǎng)絡(luò)。戰(zhàn)術(shù)網(wǎng)絡(luò)獨有的特點和性質(zhì)削弱了常用移動模型下相關(guān)研究的意義。對經(jīng)典的組移動模型 (RPGM)進(jìn)行了分析并提出改進(jìn)方法,提出了一種新的組移動模型,模擬戰(zhàn)術(shù)網(wǎng)絡(luò)單兵節(jié)點在運動過程中曲折前進(jìn)的情形。通過仿真比較,提出的模型更加符合戰(zhàn)術(shù)網(wǎng)絡(luò)的特點,適合戰(zhàn)術(shù)網(wǎng)絡(luò)技術(shù)仿真,具有一定的參考意義。
關(guān)鍵詞:組移動模型;目標(biāo)坐標(biāo);終點坐標(biāo);運動周期;Z-ERPGM模型
0引言
隨著網(wǎng)絡(luò)技術(shù)的日益發(fā)展,人們意識到移動Ad Hoc網(wǎng)絡(luò)(Mobile Ad hoc NETworks,MANET)能夠帶來的網(wǎng)絡(luò)領(lǐng)域的影響與潛力。MANET中節(jié)點移動方式的變遷對網(wǎng)絡(luò)協(xié)議的性能能夠產(chǎn)生較大影響,尤其在環(huán)境較為惡劣的戰(zhàn)場環(huán)境下,甚至能使網(wǎng)絡(luò)陷入癱瘓[1-3]。因此為了達(dá)到較好的網(wǎng)絡(luò)協(xié)議性能,在研究網(wǎng)絡(luò)協(xié)議過程中應(yīng)選擇合適的節(jié)點移動模型[4]。當(dāng)前提出的移動模型大致可分為軌跡移動模型(Trace Mobility Model)和合成移動模型(Synthetic Mobility Model)。前者事先讓真實節(jié)點進(jìn)行移動并記錄它們的軌跡信息,然后再仿真過程中讓模擬節(jié)點按照相應(yīng)軌跡信息進(jìn)行移動,實現(xiàn)起來較為復(fù)雜難度也較大[5]。后者是指人為歸納節(jié)點運動特點,并運用數(shù)學(xué)工具設(shè)計特定規(guī)則或公式,在仿真過程中實時計算節(jié)點下一步運動軌跡,這類移動模型實現(xiàn)相對容易,成本也相對低廉。
針對軍事領(lǐng)域中節(jié)點在運動過程中相對集中的特點,人們提出參考點組移動模型(Reference Point Group Mobility model,RPGM[6])。在RPGM中,每個群組都有一個邏輯中心(ReferencePoint,RP),可以用邏輯中心的移動來定義整個群組的運動行為,群組的運動將由邏輯中心的運動決定。節(jié)點移動主要包括群組和個體的移動兩個方面,群組所定義的是多個節(jié)點間的一種同屬的邏輯關(guān)系,中心的行為定義為整個群組的移動行為,群組的移動由RP的改變來表示[7]:而個體的移動由兩部分構(gòu)成,一是RP的移動,另一方面是個體以RP為參考點的隨機(jī)移動。除此之外,追逐團(tuán)體移動模型(Pursue Mobility Model,PMM)[8-9]也是較為符合戰(zhàn)場環(huán)境的移動模型。隊列移動模型(Column Mobility Model,CMM)[10]描述了在追蹤和搜索場景下節(jié)點以一列縱隊的形式統(tǒng)一向一個方向運動的情形。在CMM中,每個節(jié)點可在其初始位置附近徘徊,且不僅限于通常的縱隊移動,還可以以任意角度移動。
隨著移動模型相關(guān)研究的逐漸深入,某些經(jīng)典模型也逐漸暴露出了一些不足,于是人們提出了一些新的模型用于進(jìn)一步的研究工作。文獻(xiàn)[11]提出以指揮員節(jié)點為參考點且更加接近真實群組移動模型。文獻(xiàn)[12]針對Unmanned Aerial Vehicles (無人駕駛飛機(jī))ad hoc網(wǎng)絡(luò)提出一種移動模型,規(guī)定UAV所有可能的運動模式,在完成某一種運動模式后以隨機(jī)的方式進(jìn)入下一個模式,如此往復(fù)。文獻(xiàn)[13]在原始高斯馬爾科夫移動模型基礎(chǔ)上一種三維的增強(qiáng)型高斯馬爾科夫(Enhanced Gauss-Markov,EGM)移動模型,該模型適用于航空領(lǐng)域的ad hoc網(wǎng)絡(luò)研究,如戰(zhàn)場UAV網(wǎng)絡(luò)、民用飛行機(jī)網(wǎng)絡(luò)等等。
本文著眼于戰(zhàn)場環(huán)境下節(jié)點運動特征,首先對RPGM模型不足之處加以改進(jìn),進(jìn)而針對性的提出了一種新的適用于戰(zhàn)場環(huán)境的組移動模型——Z-ERPGM模型(Z-Enhance Reference Point Group Mobility model)。該模型充分考慮了節(jié)點在戰(zhàn)場上可能發(fā)生的移動軌跡,主要描述節(jié)點以Z字形的行進(jìn)方式向終點坐標(biāo)曲折前進(jìn)的情形。最后,本文針對模型自身參數(shù)以及模型下路由協(xié)議的性能進(jìn)行仿真。由仿真數(shù)據(jù)可知:Z-ERPGM模型比RPGM和RWP模型更為貼近真實戰(zhàn)場環(huán)境;另一方面,不同的移動模型對路由協(xié)議性能有著較大的影響。
1RPGM模型


(1)
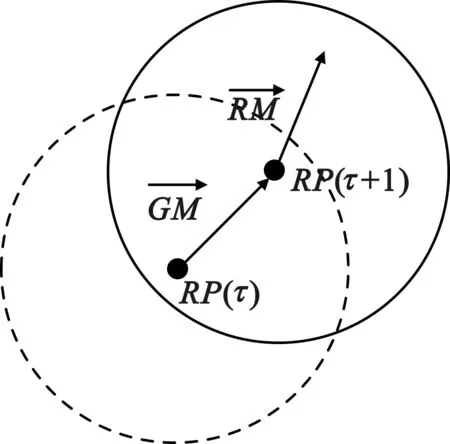
圖1 RPGM中節(jié)點新位置確定示意
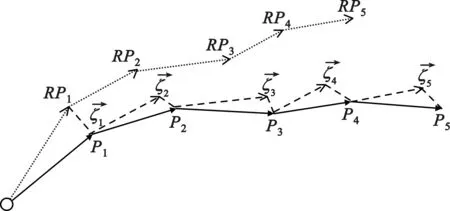
圖2 RPGM中節(jié)點移動誤差累積示意
2Z-ERPGM移動模型
2.1RPGM模型的改進(jìn)

我們首先限定節(jié)點與節(jié)點組的誤差上限為r,每次確定新位置時的累積誤差不能超過r,用公式表達(dá)為:
(2)
2.2Z-ERPGM模型
2.2.1流程描述
Z-ERPGM具體工作流程主要分初始和正常工作兩個階段:初始階段中,Z-ERPGM根據(jù)給定的節(jié)點組初始中心坐標(biāo)位置(即RP1),在一定范圍內(nèi)等概地隨機(jī)布置節(jié)點,節(jié)點在節(jié)點組范圍內(nèi)均勻分布;然后在仿真區(qū)域內(nèi)為每一個節(jié)點組等概地隨機(jī)取一個坐標(biāo)點作為該節(jié)點組的初始終點坐標(biāo)。經(jīng)初始化后,節(jié)點移動進(jìn)入正常工作階段,此時節(jié)點以一定概率向不同的方向先運動一段距離,然后再調(diào)整行進(jìn)方向,并始終保持節(jié)點最終運動方向始終朝著終點坐標(biāo)。當(dāng)?shù)谝淮蔚竭_(dá)指定終點坐標(biāo)時,節(jié)點圍繞該坐標(biāo)點運動一段時間后隨機(jī)選取下一個終點坐標(biāo)位置,并同樣以Z字形行進(jìn)方式向該坐標(biāo)點進(jìn)發(fā)。
在Z-ERPGM模型中,節(jié)點運動過程類似RWP移動模型,主要區(qū)別在于每個周期選取目標(biāo)坐標(biāo)的方法。Z-ERPGM根據(jù)節(jié)點上一運動周期的參考點RP和終點坐標(biāo)位置以及組移動情況選擇下一周期的目標(biāo)參考點坐標(biāo)RP,最后在加入一個隨機(jī)矢量而生成新的目標(biāo)坐標(biāo)點。在節(jié)點運動過程中,同組節(jié)點速度可能存在差異,導(dǎo)致某些節(jié)點的目標(biāo)坐標(biāo)選取頻率更快,因此每次節(jié)點組的新參考點RP的選擇都由運動最快的那個節(jié)點所決定(如圖3中虛線的ac段路徑)。
為了使同組節(jié)點在存在一定的速度差異的情況下,速度慢的節(jié)點能保持和速度快的節(jié)點保持同樣的“歷史參考點坐標(biāo)”,避免由于“歷史參考點坐標(biāo)”的不同導(dǎo)致同組節(jié)點運動軌跡出現(xiàn)紊亂,所以在算法實現(xiàn)過程中記錄每一個更新的RP是非常有必要的(如圖3中虛線的ab段路徑)。
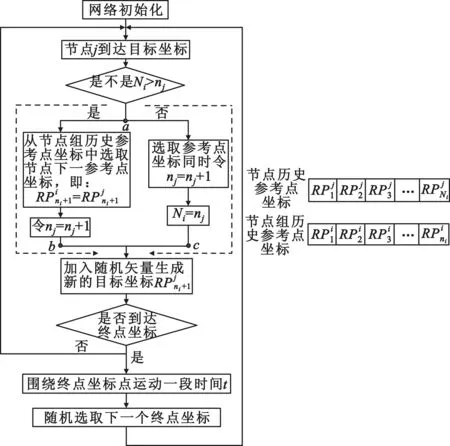
圖3 節(jié)點目標(biāo)坐標(biāo)選取流程
2.2.2運動周期
在RandomWayPoint(RWP)模型中,節(jié)點在仿真區(qū)域中隨機(jī)的選取一個起始坐標(biāo)和目標(biāo)坐標(biāo),以恒定的速率從起始地運動到目的地,隨后在目的地暫停一段時間。之后選取新的目標(biāo)坐標(biāo)開始下一次運動,如此反復(fù),直至仿真結(jié)束。由于模型中節(jié)點運動明顯的重復(fù)性,因此我們定義這一過程為一個運動周期,每個周期都有一個相對應(yīng)的決定節(jié)點運動方向的“目標(biāo)坐標(biāo)”。顯然,一個運動周期由兩個時期組成,即節(jié)點的移動期和停留期。
2.2.3組參考點坐標(biāo)讀取
節(jié)點在上個周期的目標(biāo)坐標(biāo)點處度過停留期后,需要重新選擇新的目標(biāo)坐標(biāo)來實現(xiàn)曲折前進(jìn)。首先需要確認(rèn)該節(jié)點是否是所在節(jié)點組移動最快的節(jié)點。若不是,則讀取節(jié)點組參考點坐標(biāo)作為當(dāng)前節(jié)點的下一步運動的參考點坐標(biāo)(圖3中ab段路徑);若是則自行定義整個節(jié)點組的下一參考點坐標(biāo)(圖3中ac段路徑)。

1)當(dāng)Ni>nj時,即存在同組節(jié)點在參考點坐標(biāo)選取次數(shù)上大于該節(jié)點,節(jié)點直接讀取節(jié)點組的歷史參考點坐標(biāo)作為其下一個目標(biāo)坐標(biāo)。這樣,后行節(jié)點才能與先行節(jié)點保持穩(wěn)定的“組關(guān)系”而不至于出現(xiàn)組分裂的現(xiàn)象。
2)當(dāng)Ni=nj時,說明節(jié)點j是參考點坐標(biāo)選取頻率最快的節(jié)點。此時,該節(jié)點需要自行確定下一RP,領(lǐng)導(dǎo)整個節(jié)點組的運動趨勢。
當(dāng)節(jié)點組所有節(jié)點中運動最快的節(jié)點到達(dá)目標(biāo)坐標(biāo)后,由于Ni=nj,所以該節(jié)點組的下一步運動趨勢由該節(jié)點所決定。
圖4所示,圖中虛線表示節(jié)點組起始坐標(biāo)和終點坐標(biāo)的連線。所謂Z字形運動軌跡,其實就是節(jié)點在運動過程中的一種左右擺動的運動軌跡,即節(jié)點在虛線的上下方位置來回變換而形成的運動軌跡。在確定RP之前節(jié)點需要判斷自身處于虛線的上方還是下方,在上方時節(jié)點偏向于向下方運動,在下方時則偏向于向上方運動。當(dāng)節(jié)點是其所在節(jié)點組中運動速度最快的節(jié)點時,整個節(jié)點組的下一步運動趨勢就由該節(jié)點所決定,隨后跟上的同組節(jié)點應(yīng)隨著當(dāng)前節(jié)點的運動趨勢進(jìn)行下一步的移動。
在每次選取RP時,我們將起始坐標(biāo)指向終點坐標(biāo)的方向作為 “邏輯東方”,則可決定剩下的邏輯方位。基于上述原因,我們用概率表示節(jié)點的偏好,p1,p2,p3,p4分別表示節(jié)點選擇邏輯東北方、邏輯西北方、邏輯西南方、邏輯東南方的概率。顯然,為了實現(xiàn)節(jié)點上下擺動的運動方式,這些概率都是因節(jié)點與虛線的相對位置變化而變化的。當(dāng)節(jié)點抵達(dá)目標(biāo)坐標(biāo)后,應(yīng)決定下一RPk(xk,yk),并根據(jù)新生成的參考點決定下一個目標(biāo)坐標(biāo)位置。其主要步驟可分為以下幾步(見圖4),且很大程度上依賴于上一運動周期的參考點坐標(biāo)RPk-1(xk-1,yk-1)的位置:
1)節(jié)點首先以概率的形式?jīng)Q定下一個運動的大致方向,即邏輯方位。
3)最后以隨機(jī)方式選擇下一步運動的距離lk,為保證節(jié)點在運動過程中實現(xiàn)多次的方向改變,文中令lk≤L/10,其中L為起始坐標(biāo)與終點坐標(biāo)的直線距離。
4)此時,根據(jù)上述指標(biāo),節(jié)點下一步運動的參考點坐標(biāo)(xk,yk)即確定,可由公式表達(dá)如式(3):
(3)

圖4 節(jié)點目標(biāo)坐標(biāo)選取示意
綜合以上描述,節(jié)點目標(biāo)選取工作流程如下:①確定自身所處位置,判斷在虛線上方或下方;②依據(jù)預(yù)設(shè)概率,隨機(jī)選擇一個方向(即與邏輯東方的夾角α);③依據(jù)預(yù)設(shè)的目標(biāo)坐標(biāo)偏離距離大小在選定方向上選取一個坐標(biāo)點。此時該坐標(biāo)點即為下一周期的RP,并記錄以此RP以便后行節(jié)點讀取。確定RP之后,節(jié)點依從上文提出的改進(jìn)的RPGM模型精確選取目標(biāo)坐標(biāo)P。至此,Z-ERPGM模型的一個周期工作完結(jié),隨后進(jìn)入下一個工作周期。
3仿真分析
3.1仿真平臺
ONE (Opportunistic Network Environment simulator)[14-16]是一種針對機(jī)會網(wǎng)絡(luò)仿真而開發(fā)的基于離散事件的開源仿真引擎[17]。延展性較好,實現(xiàn)了多種基本的路由算法以及一些經(jīng)典的改進(jìn)路由算法,通過編程可實現(xiàn)對移動模型的可視化仿真和各項數(shù)據(jù)的采集。
3.2仿真主要評價參數(shù)
為合理評價各個模型的特點,我們從兩個方面進(jìn)行仿真。首先綜合考慮多個常見移動模型參數(shù)度量[18],主要包括移動性度量和連通性度量。其中,移動性度量主要包含空間相關(guān)性程度和時間相關(guān)性程度。連通性度量主要包含鏈路平均持續(xù)時間和路徑平均持續(xù)時間。其次,從路由的角度出發(fā),以Epidemic Routing為例測試RPGM和Z-ERPGM兩種模型對該路由性能的影響。
3.2.1移動性度量

(4)
(5)
1)空間相關(guān)性程度Dspacial(i,j,t)
(6)
空間相關(guān)性程度指的是兩個節(jié)點之間的速度相似程度。如果兩個節(jié)點在同一方向上移動那么它們就具有很高的空間相似度。
2)時間相關(guān)性程度Dtemporal(i,t,t′)

(7)
時間相關(guān)性程度指的是某節(jié)點在兩個時間點的速度相似程度,也可以節(jié)點當(dāng)前時刻的速度對于先前時刻速度的依賴程度,能較為直觀地反映該節(jié)點速度變化程度。
3.2.2連通性度量
連通性度量主要反映網(wǎng)絡(luò)節(jié)點間的通信機(jī)會大小、通信持續(xù)時間等方面問題,比較直觀的反應(yīng)了網(wǎng)絡(luò)各部分間的連通性好壞。
(8)
其中,LD(i,j)表示節(jié)點i和j之間的鏈路持續(xù)時間,N表示網(wǎng)絡(luò)中所有節(jié)點的集合,N是一段時間內(nèi)網(wǎng)絡(luò)產(chǎn)生的鏈路總數(shù)。
(9)
其中,M是一段時間內(nèi)網(wǎng)絡(luò)中產(chǎn)生的路徑總數(shù)。一般的,兩條或兩條以上相接的鏈路才能構(gòu)成一條路徑,所以N≥M。
3.3結(jié)果及分析
3.3.1移動模型參數(shù)仿真及分析
根據(jù)上述仿真環(huán)境參數(shù),采用蒙特卡羅法對同一模型重復(fù)仿真并取各參數(shù)平均值作為最終評定參數(shù)指標(biāo)。
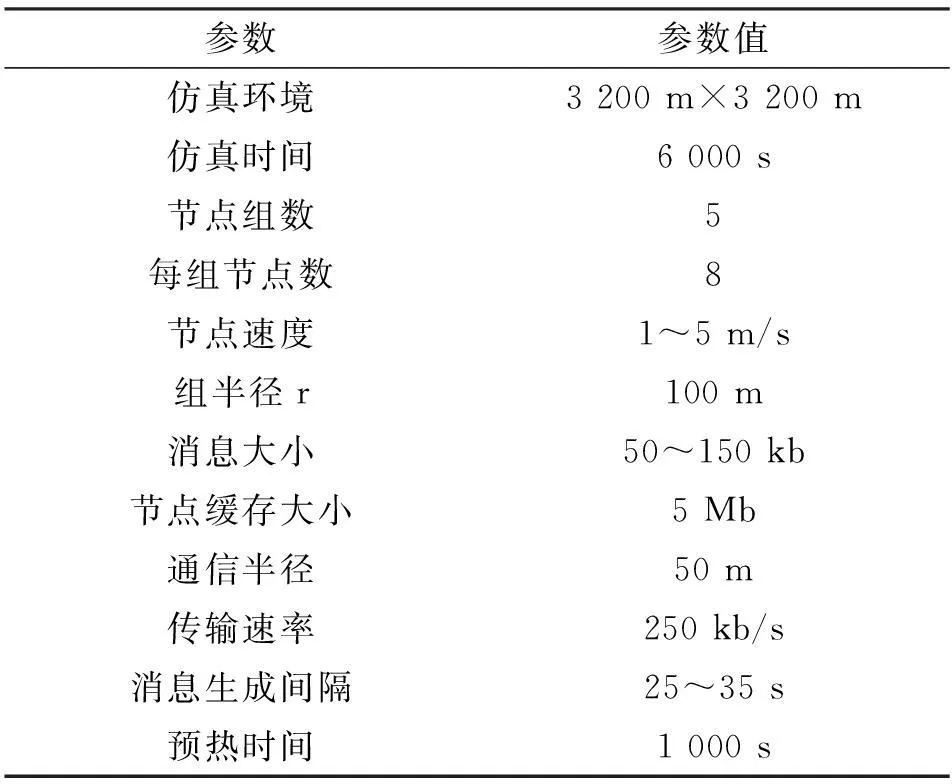
表1 仿真參數(shù)
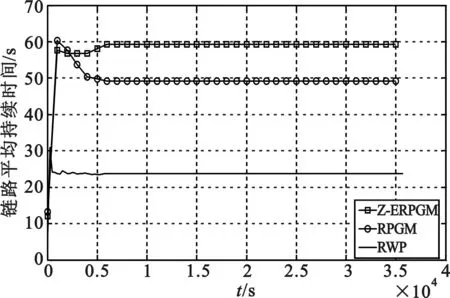
圖5 鏈路平均持續(xù)時間

圖6 路徑平均持續(xù)時間
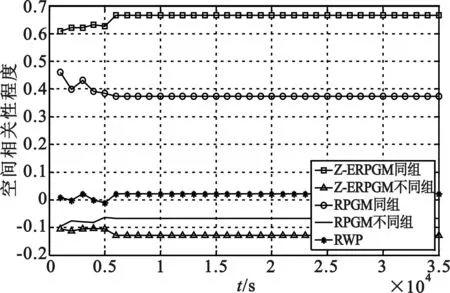
圖7 空間相關(guān)性程度
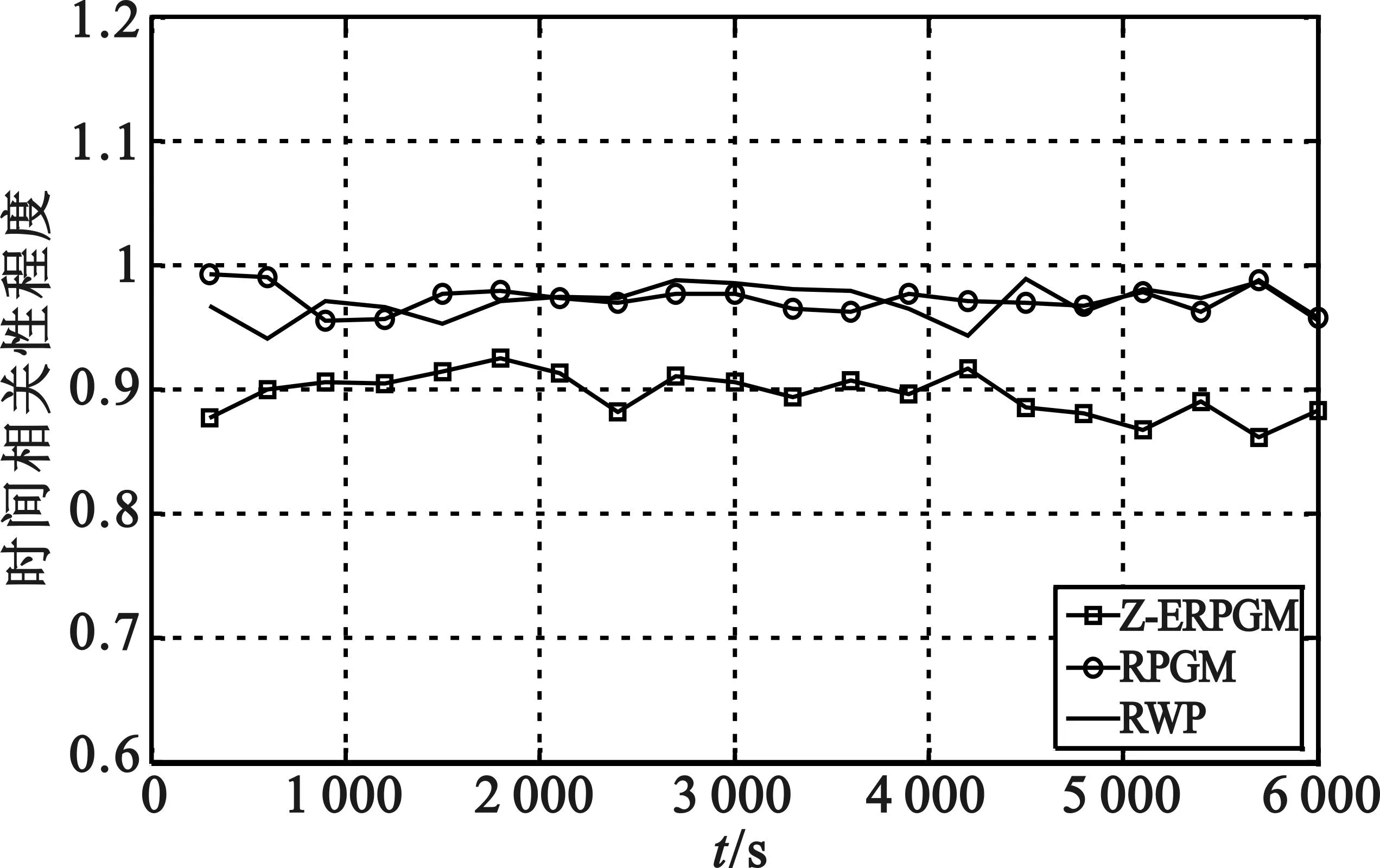
圖8 時間相關(guān)性程度
從圖6中可以看出,RWP模型在整個模型仿真時間內(nèi)產(chǎn)生的可用路徑數(shù)量極為稀少,在持續(xù)時間上也明顯落后,而Z-ERPGM和RPGM模型則能持續(xù)產(chǎn)生路徑,導(dǎo)致這種現(xiàn)象的主要原因還是因為同組節(jié)點間的頻繁相遇。如圖7所示,在空間相關(guān)性程度上群移動模型明顯具有兩極分化的特點。另外,所有節(jié)點間運動都相互獨立的RWP模型的空間相關(guān)性程度也很低,且在模型趨于平穩(wěn)后該參數(shù)數(shù)值始終大于0。
對于圖8,由于時間相關(guān)性程度描述的是同一節(jié)點在不同時間點上的速度改變程度。所以,RPGM和RWP模型在這方面的性能基本處于同一水平。而Z-ERPGM模型具有“左右擺動”的運動特點,節(jié)點速度在短時間內(nèi)可能出現(xiàn)大幅變化,這就降低了時間相關(guān)性程度。
3.3.2兩種移動模型下路由協(xié)議性能的仿真及分析
由以上仿真結(jié)果可知,Z-ERPGM和RPGM移動模型兩者在移動性和連通性方面具有較大差異,這有可能導(dǎo)致同一路由協(xié)議在這兩種移動模型下得到截然不同的性能。為驗證這點,我們以Epidemic Routing為例,通過仿真分析兩種移動模型的不同。
為更好的通過路由機(jī)制體現(xiàn)移動模型的不同,我們設(shè)置消息的目的節(jié)點不與源節(jié)點同組。與此同時,由于組運動模型的特殊性,節(jié)點組間相遇機(jī)會較小,成功到達(dá)目的節(jié)點的消息也相對較少。
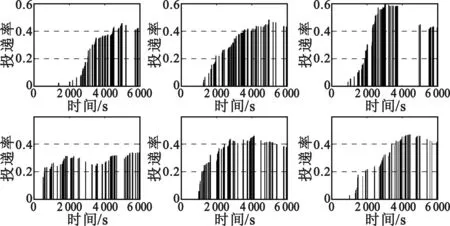
圖9 RPGM模型下投遞率
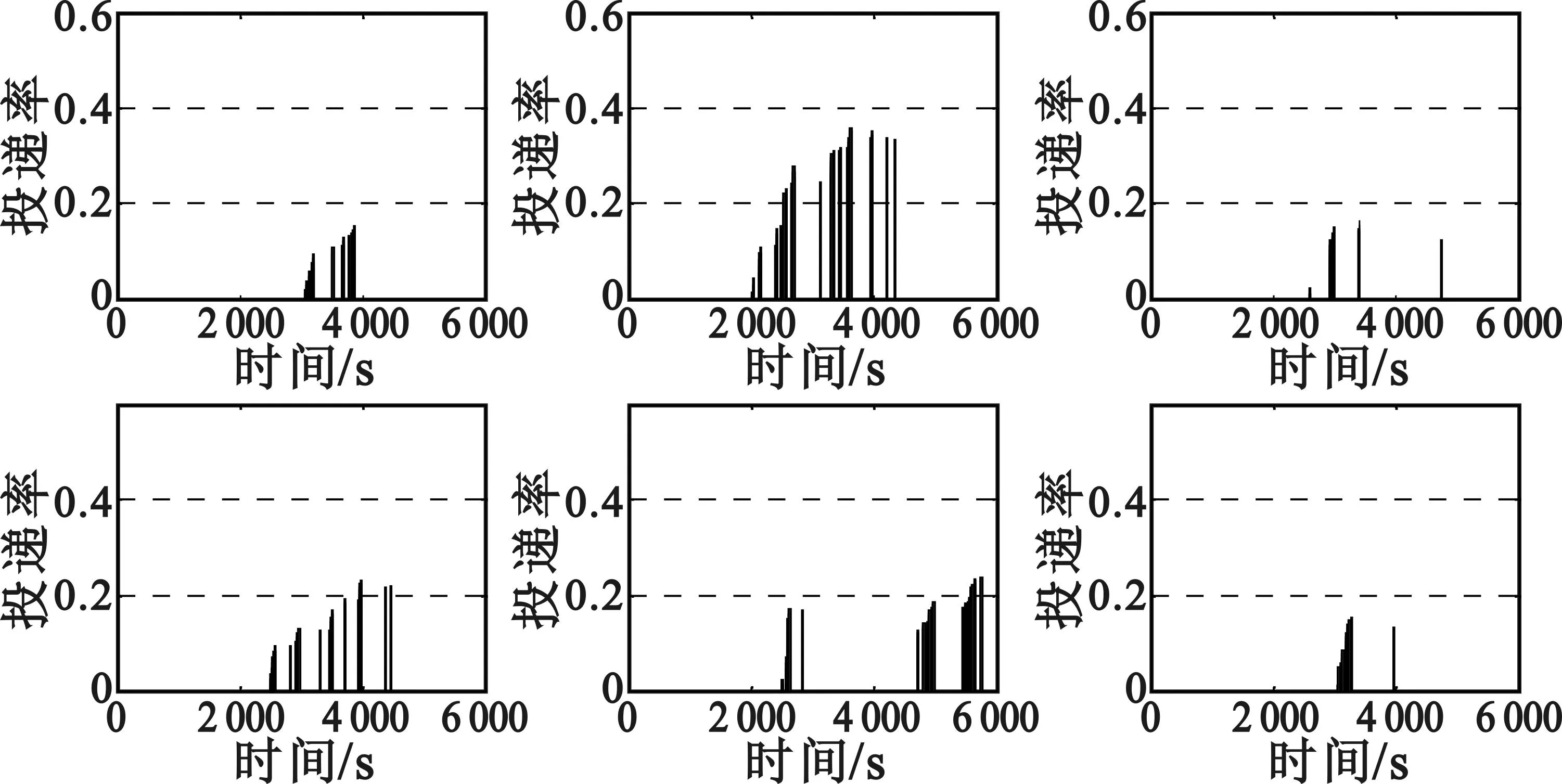
圖10 Z-RPGM模型下投遞率
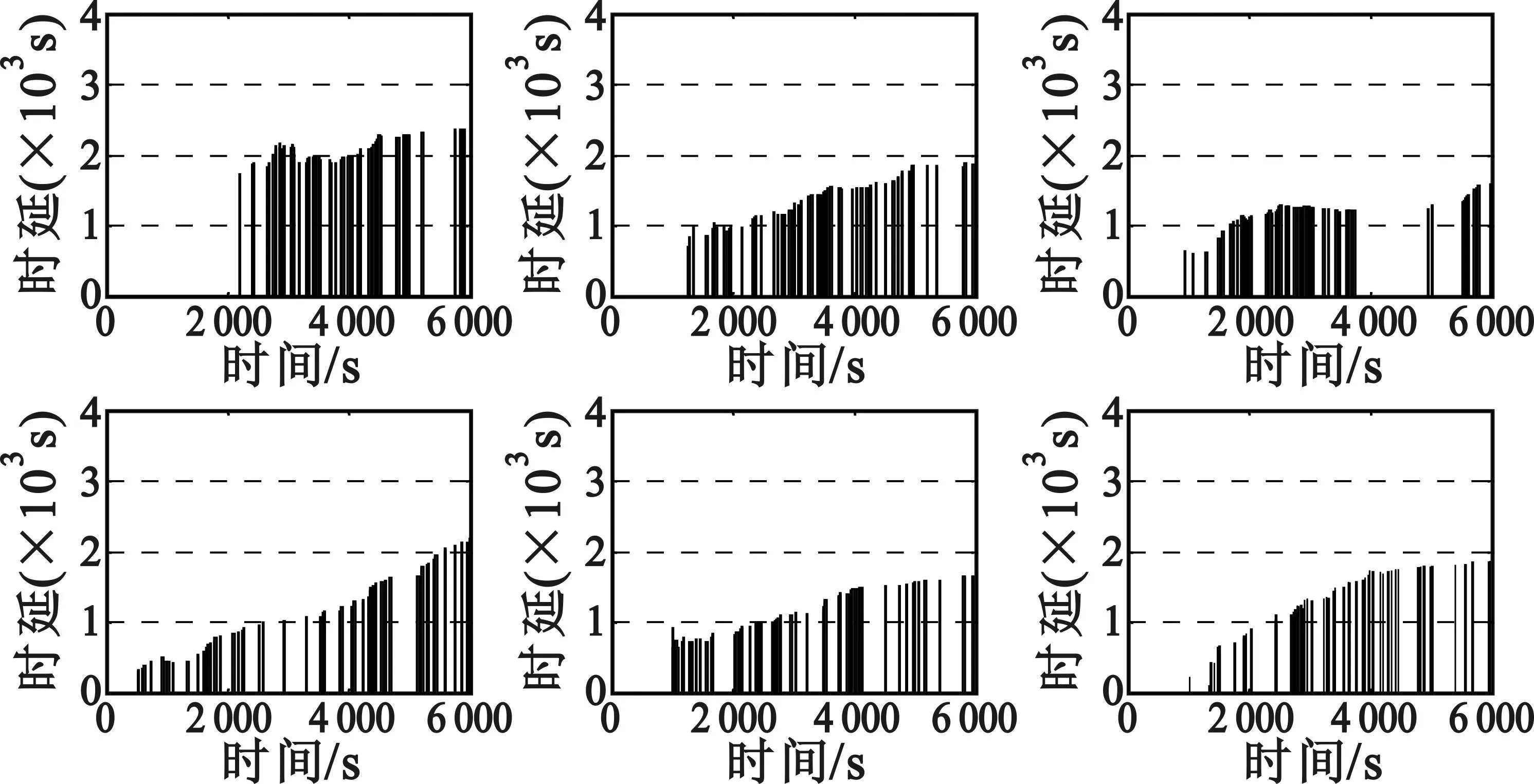
圖11 RPGM模型下投遞時延性能
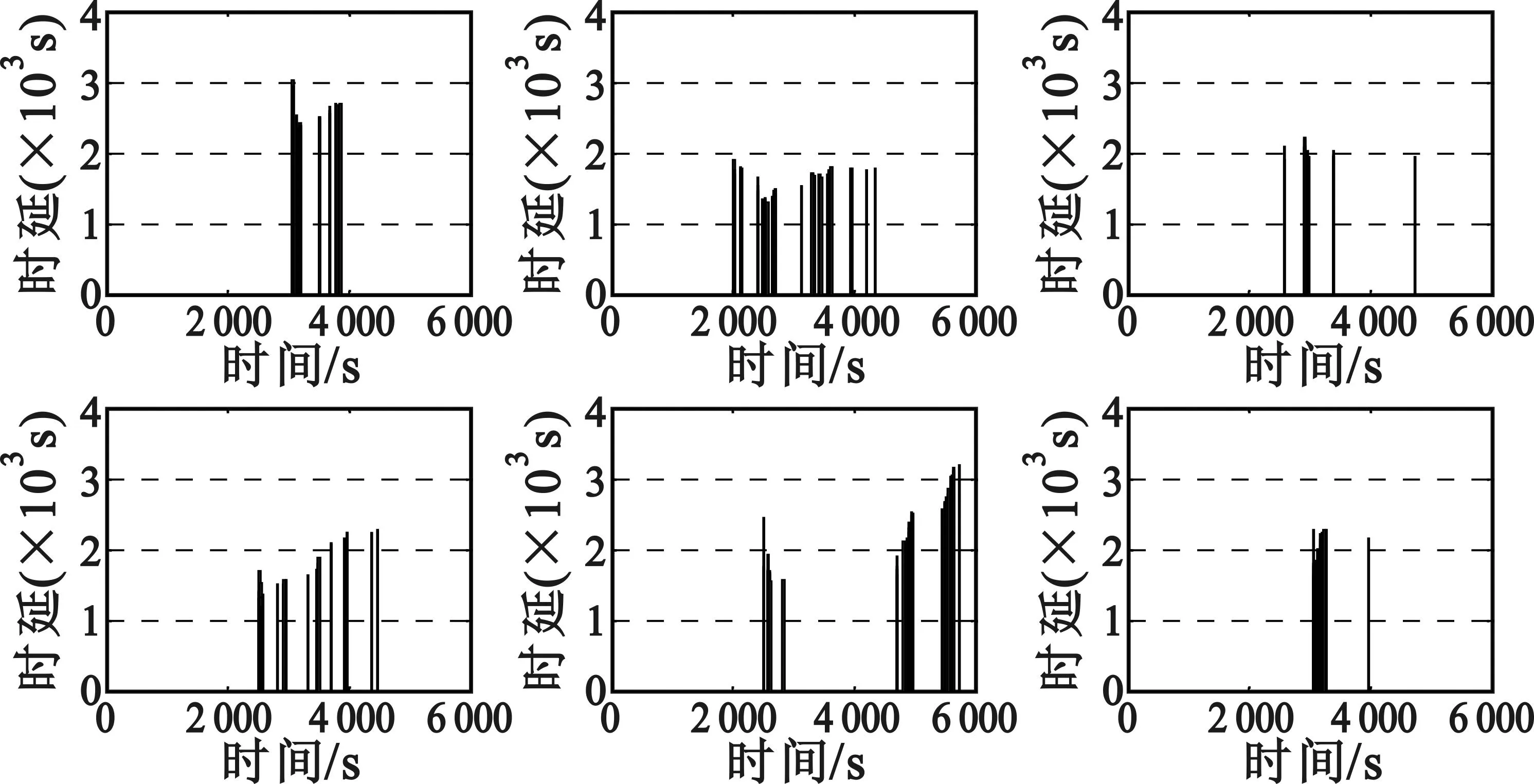
圖12 Z-RPGM模型下投遞時延性能
圖9、圖10所示的是Epidemic Routing在兩種移動模型下的消息投遞率性能表現(xiàn),前者柱狀條排列緊密且數(shù)值較大,后者排列稀疏且數(shù)值較小。很顯然,RPGM在投遞率性能方面優(yōu)于Z-ERPGM。在時延性能方面,如圖10、11所示,兩種模型基本處于相同水平。說明Epidemic Routing在RPGM模型下的性能優(yōu)于在Z-ERPGM模型下的性能,主要原因在于Z-ERPGM節(jié)點間的強(qiáng)“組關(guān)系”,節(jié)點相遇機(jī)會基本取決于節(jié)點組的運動活躍程度,節(jié)點組愈不活躍,消息就愈發(fā)無法得到有效的傳遞。
綜合圖9~12,經(jīng)典的Epidemic Routing在兩種移動模型下并沒有得到較為理想的性能,進(jìn)一步說明合適的移動模型是路由機(jī)制的設(shè)計與評定的基礎(chǔ)。
4結(jié)語
本文首先對經(jīng)典組移動模型RPGM進(jìn)行了分析,并針對其“組關(guān)系弱化”的問題提出了改進(jìn)方法。然后針對戰(zhàn)術(shù)網(wǎng)單兵節(jié)點可能的運動方式與軌跡,進(jìn)一步提出了Z-ERPGM模型,模擬戰(zhàn)場環(huán)境下戰(zhàn)士為隱蔽身形和保全自身而向目標(biāo)地曲折前進(jìn)的運動軌跡。仿真結(jié)果表明,Z-ERPGM具有不同于RPGM的特點,如強(qiáng)組關(guān)系、組間通信相對較弱、組間獨立性高等,這與戰(zhàn)場環(huán)境更為吻合,基于該模型設(shè)計的路由協(xié)議具有較強(qiáng)的實際應(yīng)用價值。
參考文獻(xiàn):
[1]Singh U,Singh M and Malhotra S.Performance Evaluation of Routing Protocols under Different Mobility Models over MANETs[J].International Journal of Application or Innovation in Engineering & Management (IJAIEM),2014: 3(5): 392-400.
[2]Kalra U S,Singh M and Malhotra S.Effect of Varying Mobility Model on Routing Protocols under Different Scalability and Offered Load over Wireless Ad-hoc Network[J].International Journal,2014,2(5): 225-235.
[3]Kumar S,Agrawal G S and Sharma S K.Impact of Mobility Models on MANETs Routing Protocols[J].INROADS-An International Journal of Jaipur National University,2014,3(1s): 142-147.
[4]孫翔,李洪烈,李穎等.Ad Hoc 網(wǎng)絡(luò)移動模型研究[J].四川兵工學(xué)報,2013,34(10): 143-147.
SUN Xiang,LI Hong-lie,LI Ying,et al.Summary of Mobile Model in Ad Hoc Network Research[J].Journal of Sichuan Ordnance,2013,34(10):143-147.
[5]McNett M,Voelker G M.Access and Mobility of Wireless PDA Users[J].ACM SIGMOBILE Mobile Computing and Communications Review,2005,9(2): 40-55.
[6]HONG X,Gerla M,Pei G.A Group Mobility Model for Ad Hoc Wireless Networks[C].In Proceedings of the ACM International Workshop on Modeling and Simulation of Wireless and Mobile Systems(MSWiM),August 1999: 53-60.
[7]張志濤,李德敏,葉迅華,等.基于組移動模型的鏈路生存時間預(yù)測[J].通信技術(shù),2011,44(01):105-108.
ZHANG Zhi-tao,LI De-min,YE Xun-hua,et al.Prediction of Link Expiration Time based on Group Mobility Model[J].Communications Technology,2011,44(1):105-108.
[8]Sanchez M.Mobility Models[EB/OL].http:// www.disca.upv.es/misan/mobmodel.htm.Accessed on May 13,2001.
[9]Vanessa Ann Davies.Evaluating Mobility Models within An Ad Hoc Network[D].advisor: Tracy Camp,Dept.of Mathematical and Computer Sciences.Colorado School of Mines,2000.
[10]Camp T,Boleng J,Davies V.A Survey of Mobility Models for Ad Hoc Network Research[J].Wireless Communications & Mobile Computing: Special Issue on Mobile Ad Hoc Networking: Research,Trends and Applications,2002,2(5): 483-502.
[11]劉行兵,孫華,鄭雪峰.戰(zhàn)術(shù)Ad hoc 網(wǎng)單元群組移動模型研究[J].中南大學(xué)學(xué)報:自然科學(xué)版,2012,43(04):1382-1386.
LIU Xing-bing,SUN Hua,ZHENG Xue-feng.Mobility Models for Unit Cluster of Tactical Ad Hoc Networks[J].Journal of Central South University (Science and Technology),2012,43(4):1382-1386.
[12]Bouachir O,Abrassart A and Garcia F.A Mobility Model For UAV Ad hoc Network[J].ICUAS'14 Proceedings,2014:383-388.
[13]Jean-Daniel Medjo Me Biomo.Unmanned Aeronautical Ad-hoc Networks: Enhancing the Reactive-Greedy-Reactive Protocol and Introducing A New Mobility Model[D].Master Degree.Carleton University,2014.
[14]http://www.netlab.tkk.fi/tutkimus/dtn/theone/
[15]Ker?nen A,Ott J and K?rkk?inen T.The ONE Simulator for DTN Protocol Evaluation[C].Proceedings of the 2nd International Conference on Simulation Tools and Techniques.ICST (Institute for Computer Sciences,Social-Informatics and Telecommunications Engineering),2009:55.
[16]LIU X and CHEN Y.Report of A DTN Simulator-THE ONE[J].2013:1-8.
[17]王朕,王新華,隋敬麒.機(jī)會網(wǎng)絡(luò)模擬器ONE及其擴(kuò)展研究[J].計算機(jī)應(yīng)用研究,2012,29(01):272-277.WANG Zhen,WANG Xin-hua,SUI Jing-qi.Extending Research for ONE Simulator of Opportunistic Network[J].Application Research of Computers,2012,29(01):272-277.
[18]郭麗芳,李鴻燕,李艷萍.無線Ad Hoc網(wǎng)絡(luò)移動模型大全[M].北京:人民郵電出版社,2014.
GUO Li-fang,LI Hong-yan,LI Yan-ping.Collection of Wireless Mobile Ad Hoc Network Model[M].Beijng:People′s Posts and Telecommunications Publishing House,Beijing,2014.
A Group Mobility Model Suitable for Tactical Network
LI Ning,JIANG Yuan,LAI Rong-xuan,HAN Xu
(School of Communication Engineering,PLA University of Science and Technology,Nanjing Jiangsu 210003,China)
Abstract:The mobility model of nodes plays a pivotal role in the research of ad hoc network technology and has a direct effect on various performances of the routing protocol during simulations,particularly in the research of ad hoc network in special environments,which requires need more special mobility models,such as TANET (TActical NETworks).The specific characteristics and nature of tactical network may reduce the meaning of TANET correlation studies based on normal mobility model.A classical group mobility model named RPGM is analyzed,and modified method proposed,and then a new group mobility model modeling the zigzag walk of individual soldier presented.The simulation shows that the proposed mobility model is suitable for TANET and for the simulation of network technology,and thus is of certain reference significance.
Key words:group mobility model; target coordinate; destination coordinate; period of motion; Z-ERPGM (Enhance Reference Point Group Mobility) model
doi:10.3969/j.issn.1002-0802.2016.02.012
* 收稿日期:2015-09-06;修回日期:2015-12-20Received date:2015-09-06;Revised date:2015-12-20
基金項目:國家自然科學(xué)基金項目(No.61371123),江蘇省基金重點專項(No.BK2011002),國家自然科學(xué)基金青年項目(No.61301165)
Foundation Item:National Natural Science Foundation of China(No.61371123),Special Foundation of Jiangsu Province(No.BK2011002),National Natural Science Foundation of China for Young Scholar(No.61301165)
中圖分類號:TP393
文獻(xiàn)標(biāo)志碼:A
文章編號:1002-0802(2016)02-0182-07
作者簡介:

李寧(1967-),男,副教授(碩導(dǎo)),主要研究方向為ad hoc網(wǎng)絡(luò)技術(shù);
蔣媛(1991-),女,碩士研究生,主要研究方向為信號感知處理;
賴榮煊(1990-),男,碩士研究生,主要研究方向為ad hoc網(wǎng)絡(luò)技術(shù);
韓序(1990-),男,碩士研究生,主要研究方向為移動通信。