聲表面波溫度傳感器頻率分級掃描方法研究
2016-06-24 01:56:12鄭天祥
傳感器與微系統 2016年5期
鄭天祥,李 璐,陳 碩
(國網智能電網研究院,北京 102200)
聲表面波溫度傳感器頻率分級掃描方法研究
鄭天祥,李璐,陳碩
(國網智能電網研究院,北京 102200)
摘要:針對聲表面波(SAW)諧振腔體的頻率響應單側單調特征,為提高傳感器的溫度響應速度,提出了一種頻率分級掃描方法,將頻率掃描分為粗掃頻和精掃頻兩個階段,以不同的掃頻步長依次進行。利用粗掃頻確定中心諧振頻率所處的頻率區間,再在該頻率區間內利用精掃頻得到腔體中心諧振頻率,可將溫度傳感器掃頻時間降為原來的1/7。利用提出的頻率掃描方法開展實驗研究,分別研究了單個傳感器的溫度量測不確定度和多個傳感器的溫度量測一致性,并分析了實驗結果。
關鍵詞:聲表面波;溫度傳感器;頻率掃描;分級掃描
0引言
電網電壓等級的升高對絕緣要求更高,電力設備的溫度在線監測需要無線無源型溫度傳感器[1]。聲表面波(SAW)傳感技術是一種典型的無線無源傳感技術[2],根據應用場景定制傳感芯片結構、優化天線設計,可實現2 m和更遠距離的無線傳輸,能滿足電網部分電壓等級下的絕緣距離要求[3]。
聲表面波溫度傳感器主要采用諧振型結構,溫度信息反映在回波信號諧振頻率的變化上[4]。為提升傳感器的測溫響應速度,需盡快檢測出聲表面波器件的諧振頻率。聲表面波溫度傳感器網絡一般包含多個溫度傳感器,按照一定的頻率間隔合理設計多個溫度傳感器的中心頻率,保證各個傳感器在所測溫度范圍內中心諧振頻率無重疊,組成多設備節點溫度傳感器網絡[5]。提高單傳感器的測溫響應速度有助于提升電網關鍵設備溫度監測的實時性水平[6]。
本文將介紹諧振型聲表面波溫度傳感器的工作原理和組網方法,研究傳感器諧振腔體的頻率響應曲線,提出諧振腔體中心頻率分級掃描方法,以快速查詢傳感器中心頻率,提高傳感器的整體響應速度。開展頻率分級掃描方法實驗研究,分別研究單傳感器與多個傳感器的溫度測量一致性等問題。
1諧振型聲表面波傳感器工作原理與組網方法
聲表面波溫度傳感器主要有諧振型和延遲線型兩種結構,諧振型結構更適宜較遠距離的無線信號收發,是常見的聲表面波溫度傳感結構,其原理如圖1所示[7]。工作過程如下:讀寫器發送某一頻率射頻信號,經傳感器天線進入叉指換能器中,由于壓電晶體的逆壓電效應,在晶體表面產生聲表面波,該波沿晶體表面向叉指換能器兩側傳播,每遇到一條反射柵均有一部分波被反射回來,另一部分波透過反射柵繼續傳播,通過合理設計反射柵的寬度和相鄰反射柵間距,各反射柵反射的回波信號間相干疊加,經叉指換能器的正向壓電效應,將反射的聲表面波轉換為射頻信號并通過傳感器天線發射出去,由讀寫器接收并檢測出頻率信息,回波信號頻率值反映了傳感器探測點的溫度信息[8,9]。
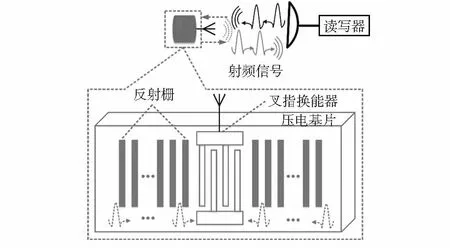
圖1 聲表面波溫度傳感原理Fig 1 Principle of surface acoustic wave(SAW) temperature sensing
傳感器中心諧振頻率f和探測點溫度T間的關系為[10,11]
f(T)=f(T0)[1+b1(T-T0)+b2(T-T0)2+…]
(1)
式中b1為一階溫度系數,b2為二階溫度系數。選出一階溫度系數高而其他階溫度系數小的晶體切向,可使傳感器中心諧振頻率隨溫度線性變化。探測傳感器的中心諧振頻率,解算出當前傳感器探測點的溫度值,以此實現溫度傳感。由于電力設備在線監測所需的溫度探測點較多,因而需要研究溫度傳感器的組網特性。
2頻率掃描方法
2.1傳感器的頻率響應曲線
采用δ函數分析方法對圖1所示的諧振腔體結構進行理論建模,傳感器頻率響應與掃描頻率間的函數關系[12]為
(2)
式中N為反射柵對數,ω0為傳感器的中心諧振頻率,Δω為讀寫器發出的掃描頻率與中心諧振頻率的差值,E0,Es分別為歸一化電場強度和感應電場強度。
式(2)仿真得到理想頻率響應曲線如圖2所示。可以看出,在頻率響應大于-40 dB范圍內進行頻率掃描,1#,2#傳感器間頻率相差1.4 MHz,不會發生串擾。
同一傳感器在不同溫度下的中心諧振頻率會發生變化,如圖3所示,隨著探測點溫度的升高,傳感器中心諧振頻率將會逐漸增大,傳感器頻率響應曲線將隨著溫度的升高而整體向右移動。探測點的溫度在-20~120 ℃間變化時,每一個溫度對應唯一的一條傳感器頻率響應曲線,通過頻率掃描測量出該溫度下的中心頻率,即可解算出探測點的溫度。

圖2 室溫下(25 ℃)不同SAW傳感器的理想頻率響應曲線Fig 2 Ideal frequency response curves of different SAW sensors at 25 ℃

圖3 不同溫度下同一SAW傳感器的理想頻率響應曲線Fig 3 Frequency response curve of the same SAW sensor under different temperatures
2.2頻率分級掃描方法
對于在25 ℃時中心諧振頻率為432.3 MHz的2#傳感器來說,當所測溫度在-20~120 ℃范圍內變化時,需在431.9~433.1 MHz間進行掃頻,根據回波信號強度解算中心諧振頻率。掃頻步長設置越小,掃頻次數越多,傳感器的溫度響應時間也就越長,需綜合考慮測量精度和響應時間來確定掃頻步長。為保證±1 ℃的溫度傳感器精度,一般選擇掃頻步長Δf1=3 kHz,需要掃頻401次。掃描頻率點及其相應頻率響應如圖4所示。每次掃描均包含多個信號發射、響應、解調等環節,增加一次頻率掃描將帶來較大的響應時間延遲。
為提高傳感器的響應速度并兼顧精度,本文提出一種頻率分級掃描方法。該方法利用傳感器頻率響應函數在中心諧振頻率兩側分別單調變化的特點,將掃頻過程分為粗精2個等級,在粗掃頻階段,選擇較大的掃頻步長,快速逼近至中心諧振頻率附近,將中心諧振頻率限制在兩個粗掃描頻率間隔范圍內;精掃頻階段在該范圍內以更小的掃頻步長掃描,實現中心諧振頻率的高精度測量。采用粗精分級的頻率掃描方法,可降低掃頻次數,提升傳感器的響應速度,對傳感器網絡中溫度傳感器輪流查詢具有重要意義。

圖4 傳感器中心諧振頻率檢測(3 kHz單一間隔頻率掃描)Fig 4 Central resonant frequency detection of SAW sensor (frequency scanning at the interval of 3 kHz)
圖5以2#傳感器為例,反映了頻率分級掃描方法的實現過程。在1.2 MHz范圍內,粗掃頻階段掃頻步長Δf2=50 kHz,需要掃描25次,并探測對應的回波信號強度,找到強度最高的三個頻率點,該頻率區間大小為兩個粗掃頻步長之和100 kHz,則傳感器的中心諧振頻率處于該區間;為保證±1 ℃的溫度傳感器精度,精掃頻階段掃頻范圍為100 kHz,掃頻步長Δf3=3 kHz,需要掃描34次。采用粗精分級頻率掃描方法,需要掃頻59次,與分級前的401次相比,傳感器在掃頻上所需的時間約為原來的1/7,可有效提升傳感器的響應速度。

圖5 傳感器中心諧振頻率檢測(50 kHz和3 kHz頻率分級掃描)Fig 5 Central resonant frequency detection by frequency grading scanning of 50 kHz and 3 kHz
3頻率分級掃描方法實驗研究
針對本文提出的頻率分級掃描方法開展聲表面波溫度傳感實驗研究,搭建了發射頻率可靈活調節的射頻收發電路,如圖6和圖7所示。該電路可在粗掃頻階段發射不同頻率信號,探測相應激勵下的聲表面波傳感器回波信號強度,并在智能判別得到精掃頻頻率區間;在精掃頻階段,該電路以更小的掃頻步長精確探測傳感器的中心諧振頻率,實現溫度傳感功能。

圖6 頻率信號收發電路Fig 6 Transceiver circuit for frequency signal

圖7 基于LabVIEW軟件的頻率信號監測平臺Fig 7 Frequency signal monitoring platform based on LabVIEW
實驗中,采用NI公司的PXI—5661矢量信號分析儀,監測射頻收發電路的頻率信號發射時序,并探測2#傳感器在不同頻率激勵下的回波信號,實驗結果如圖8所示。2#傳感器在25 ℃室溫下的中心諧振頻率約為432.3 MHz,在粗掃頻實驗階段,射頻收發電路先以50 kHz的頻率間隔發射了22組頻率信號,比較不同頻率信號激勵下傳感器的回波信號強度,將精掃頻范圍限定在0.100 6 MHz以內;精掃頻階段以3 kHz的頻率間隔發射信號激勵傳感器,根據回波信號強度解算出待測點溫度。為增強傳感器的抗干擾性能,粗掃頻和精掃頻可重復多次。

圖8 溫度傳感過程中的頻率分級掃描時間曲線Fig 8 Frequency hierarchical scanning time curve during temperature sensing process
隨后研究聲表面波傳感器的溫度測量不確定度和不同傳感器的測量一致性。將傳感器置于溫箱中,在30 ℃時進行校準;將溫度降低到-10 ℃,以10 ℃為間隔分段升溫到120 ℃,各溫度均恒溫20 min。將傳感器在每段恒溫的溫度測量值與實際溫度對比,2#傳感器的溫度傳感不確定度溫度誤差為-5~4 ℃,與電網中需要的±1 ℃精度需求還有較大差距。可對溫度傳感結果進行多次測量取溫度均值等后處理,有望得到電網所需的精度。
將6只傳感器均放入溫箱中,在30 ℃時進行校準,采用上段相同的溫度循環方法,觀察各個傳感器的溫度傳感結果,如圖9,1#~6#傳感器的溫度測量一致性所示。因在30 ℃進行溫度校準,它們在30 ℃時測量值基本一致;隨著溫度的升高,各傳感器間的溫度測量值差異增大,最大差異約為10 ℃。盡管每個傳感器的溫度曲線線性度較好,但在溫度傳感一致性方面仍需繼續提升。由于溫度傳感器在電力系統中一般用于高溫預警,在使用中可在高溫區進行溫度校準,以獲得更好的電力應用適應性。

圖9 1#~6#傳感器的溫度測量一致性Fig 9 Inconsistency of 1#~6# sensors in temperature measurement
4結論
本文介紹了聲表面波溫度傳感器的原理和組網方法,針對電力設備溫度在線監測需求中的實時性要求,為了提高單個溫度傳感器的響應速度,有效降低傳感器組網后的溫度輪流查詢時間,提出了頻率分級掃描方法。該方法通過設置粗掃頻和精掃頻2個階段,在保證中心諧振頻率檢測精度的前提下,將掃描時間縮短為原來的1/7。對聲表面波溫度傳感器開展了實驗研究,研究了單傳感器與多傳感器的溫度測量一致性問題,討論了實驗結果并指明了繼續提高傳感器性能的方向。聲表面波溫度傳感器具有無源無線的工作特征,尤其適合電力等具有復雜電磁環境的應用場合,優異的抗干擾性能和絕緣性能將使其在未來電力設備溫度在線監測中發揮重要作用。
參考文獻:
[1]Gungor V C,Lu B,Hancke G P.Opportunities and challenges of wireless sensor networks in smart grid[J].IEEE Transactions on Industrial Electronics,2010,57(10):3557-3564.
[2]葉韜,金浩,董樹榮,等.無線無源聲表面波傳感器研究進展[J].傳感器與微系統,2014,33(12):1-4.
[3]王軍峰,李平,周志坤,等.聲表面波諧振型無源無線溫度傳感器硬件系統[J].壓電與聲光,2006,28(1):1-4.
[4]Müller A,Konstantinidis G,Buiculescu V,et al.GaN/Si-based single SAW resonator temperature sensor operating in the GHz frequency range[J].Sensors and Actuators A:Physical,2014,209:115-123.
[5]張領,劉文,王磊.基于極化和復用的SAW傳感器陣列[J].傳感器與微系統,2012,31(3):78-80.
[6]李平.無源無線聲表面波傳感器及儀器系統研究[D].重慶:重慶大學,2003.
[7]阮鵬,陳智軍,付大豐,等.基于COMSOL的聲表面波器件仿真[J].測試技術學報,2012(5):422-428.
[8]周金.基于聲表面波技術的無線通信系統的研究[D].天津:南開大學,2010.
[9]Malocha D C,Gallagher M,Fisher B,et al.A passive wireless multi-sensor SAW technology device and system perspective-s[J].Sensors,2013,13(5):5897-5922.
[10] 龔貽文.聲表面波溫度傳感器及其通信天線的研究[D].武漢:華中科技大學,2012.
[11] 吳展翔,劉文,盧小榮.聲表面波溫度傳感器的仿真與設計[J].壓電與聲光,2014,36(1):8-11.
[12] 盧小榮.無源無線聲表面波溫度傳感器及應用方案設計[D].武漢:武漢郵電科學研究院,2012.
Research on frequency grading scanning method for surface acoustic wave temperature sensor
ZHENG Tian-xiang,LI Lu,CHEN Shuo
(Smart Grid Research Institute,State Grid,Beijing 102200,China)
Abstract:Frequency responses of surface acoustic wave(SAW)resonators are monotonous in single side around resonant frequency,a grading scanning method is proposed to enhance response speed of SAW sensor for temperature sensing.The scanning method contains two frequency scanning levels,named as the coarse-level and the fine-level.With the method,scanning time of the SAW sensor for temperature is reduced to 1/7.The experiments are performed to testify the effectiveness of the method.The uncertainty with a single SAW sensor and the inconsistency of multi-SAW sensors on temperature measurement are extracted by the experiments,experimental results are analyzed.
Key words:surface acoustic wave(SAW);temperature sensor;frequency scanning;grading scanning
DOI:10.13873/J.1000—9787(2016)05—0028—04
收稿日期:2015—09—28
中圖分類號:TM 932
文獻標識碼:A
文章編號:1000—9787(2016)05—0028—04
作者簡介:
鄭天祥(1987-),男,黑龍江七臺河人,博士,主要研究方向為電力傳感器與系統。