內模控制在溫度控制傳感器系統中的應用*
2016-06-24 01:59:31曠文珍
傳感器與微系統 2016年5期
常 峰,曠文珍,陸 帥
(蘭州交通大學 光電技術與智能控制教育部重點實驗室,甘肅 蘭州 730070)
內模控制在溫度控制傳感器系統中的應用*
常峰,曠文珍,陸帥
(蘭州交通大學 光電技術與智能控制教育部重點實驗室,甘肅 蘭州 730070)
摘要:為了適應現實狀況對于提高控制效果的要求,對溫度控制傳感器系統采用了內模控制方法,完成基于內模控制的溫度控制系統設計。針對具有大時滯的溫度控制對象完成基于內模控制的溫度控制系統設計;對相同的大時滯溫度控制對象,完成基于PID控制的溫度控制系統設計,并在Matlab/Simulink仿真平臺上對所設計的溫度控制系統進行仿真分析。仿真結果表明了內模控制濾波器的時間常數對系統控制效果的影響規律,其控制效果優越于PID控制。
關鍵詞:溫度控制;內模控制;大時滯;PID控制
0引言
目前,溫度已成為工業中經常遇到的一種控制對象,在冶金、化工、機械等各類工業中,廣泛使用各種電阻爐、熱處理爐、過熱蒸汽爐等溫度控制系統。所以,在工業領域的許多重大技術經濟指標直接受溫度控制效果的影響,如,生產安全、生產效率的提高、產品質量的保證、節約資源等指標。
在溫度控制系統發展中應用PID控制[1]、施密斯預估控制[2]、達林控制[3]等控制方法,但是由于溫度控制系統的非線性、大時滯、特性參數隨溫度變化及強耦合特性等特點[4],使得以上控制方法不能夠獲得較高要求的控制效果,且在實現過程中控制算法相對比較復雜。因此,經過長期實踐經驗的累積,人們根據工業過程的控制規律,提出了內模控制策略。
內模控制主要的優勢,一是響應速度快,即使模型不準確仍然具有較大優勢;二是具有較強的魯棒性,內模控制的結構特點使其對過程中的不確定性有很好的適應性,從而使控制系統的穩定性得到很好的保證。而且內模控制器的設計比較簡單、控制性能好、便于系統分析、對于數學理論的要求不高、應用時計算量小,易于為廣大工程人員所接受[5]。
1內模控制
內模控制的基本思路是將內部模型和實際控制對象做成并聯的結構,控制器取模型的動態逆,在魯棒性和輸入約束不被考慮的條件下,使閉環系統的性能可以得到滿足,通過低通濾波器的添加提高系統的魯棒性,從而使其能夠對外界干擾和模型失配帶來的不利影響有一定的適應性[6]。
1.1內模控制基本原理[7,8]

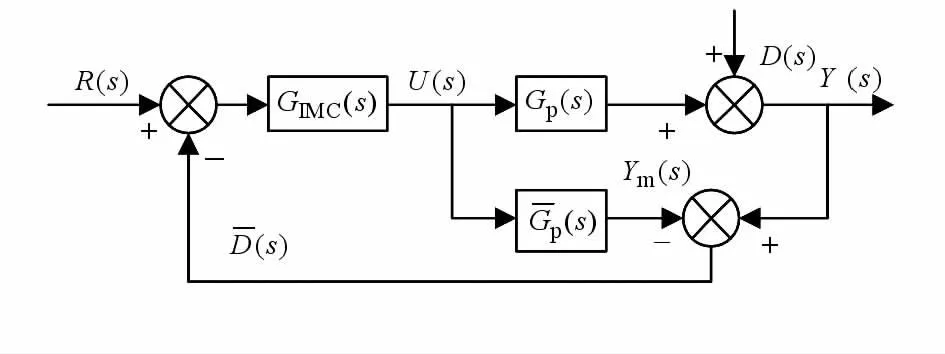
圖1 內模控制結構框圖Fig 1 Structure diagram of internal model control
對于內模控制的設計思路應先從理想控制器出發,進而考慮實際存在的約束條件,設計出符合實際要求的控制器[9,10]。圖1中,系統存在兩個輸入:擾動信號輸入(假定為不可測)D(s)和輸入給定值R(s)。下面分別討論在對系統分別施加兩種不同輸入時系統的輸出情況。
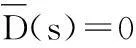
由于假定此時R(s)=0,故根據圖1可得
Y(s)=D(s)[1-GIMC(s)Gp(s)]
(1)
(2)
將式(2)代入式(1)可得
Y(s)=0
(3)
由式(3)可以得出結論:當R(s)=0,D(s)≠0,以及模型準確且可倒的情況下,本控制器是可以對外界擾動有很好抑制的理想控制器。
Y(s)=GIMC(s)Gp(s)R(s)
(4)
式(4)表明:在R(s)≠0,D(s)=0,以及模型準確且可倒時,本控制器是Y(s)能對R(s)的變化進行跟蹤的理想控制器。
由圖1可得,內模控制存在以下關系式

(5)
如果模型準確時,式(5)可以化簡為
Y(s)=GIMC(s)Gp(s)R(s)+[1-GIMC(s)Gp(s)]D(s)
(6)
其中,反饋信號為
(7)
1.2內模控制在溫度控制傳感器系統中的應用
1)溫度控制傳感器的數學建模
在對溫度控制系統進行分析與設計中,首先要建立溫度控制對象的數學模型,選取的溫度控制對象是經常見到的電加熱爐。從控制的角度分析,因為電加熱爐溫度控制具有升溫單向性、慣性、大滯后和時變性的特點[11]。對其控制難度也有所增加,且其升溫單向性又是必須面對的問題。升溫單向性是因為電加熱爐是依靠電加熱對工件進行升溫保溫;但其降溫是自然冷卻。當溫度超調,就無法使用有效的控制手段對其進行降溫。由于以上的原因存在,所以,電加熱爐難以用數學模型精確進行表達。通常其數學模型可以用以下模型定性描述
(8)
式中X為電加熱爐內溫升(爐內溫度與室溫溫差),K為放大系數,τ0為純滯后時間,t為加熱時間,T為時間系數,V為控制電壓。
對式(8)進行拉氏變換整理后,得到
(9)
2)對過程模型進行因式分解
(10)
3)控制器設計
(11)
因為輸入為階躍信號,故可以確定內模控制濾波器的形式為
(12)
式中參數r的選取必須可以使GIMC(s)成為有理的傳遞函數。由式(11)與式(12)可知,取r=1即可滿足要求。
4)模型參數的選取
模型參數取為K=1.6,τ=80,T=120。因為τ/T=80/120≥0.5,滿足大時滯系統的定義,本次所選的溫度控制對象是一個具有大時滯特性的控制對象。要求將溫度控制在30°,誤差小于5 %。內模控制的溫度控制系統結構圖可表示為如圖2所示。

圖2 內模控制的溫度控制系統結構圖Fig 2 Temperature control system structure diagram of internal model control
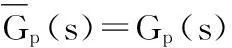
圖2是在模型準確的條件下進行設計的,所以,過程模型與控制對象的數學模型相同。其中,D(s)是不可預測的外界干擾,而Tf的值是不確定的,可以對其進行調整。
2溫控系統中影響內模控制的因素
2.1擾動對系統的影響
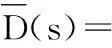
在模型準確且Tf沒有變化的情況下,仍以式(9)所描述的數學模型為對象,給定輸入階躍信號R(s)=30,對系統在無擾動和在控制器輸出端加入20 %階躍擾動信號下進行仿真,分析輸出波形。利用Matlab/Simulink仿真平臺,在上述條件下搭建系統的仿真框圖,選取Tf=10進行仿真,觀察系統輸出波形如圖3所示。
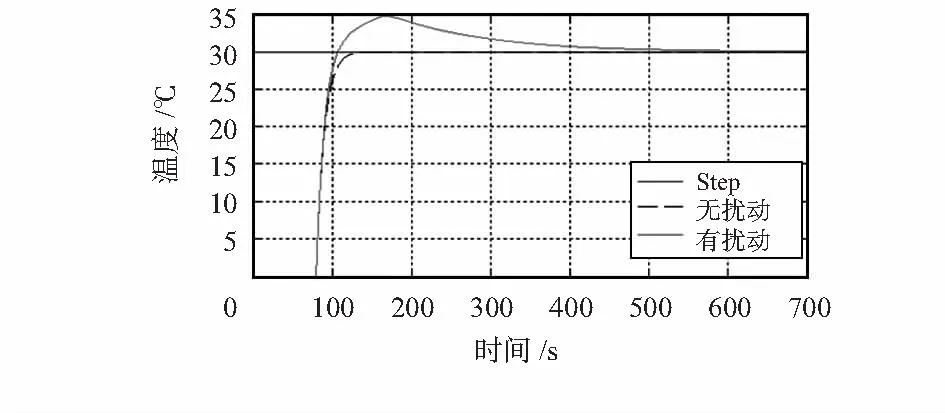
圖3 Tf=10時的輸出波形Fig 3 Output waveform of Tf=10
由圖3可知,在無擾動時系統的響應速度很快,系統很快進入穩定狀態。而存在擾動時,系統會產生超調量,經過較長的調整時間后才能進入穩定狀態。因此,當系統存在擾動時會對系統的控制效果產生不利影響。
2.2溫控對象模型失配時對系統的影響
在控制器沒有發生變化但是被控對象模型失配的情況下,對系統加上相同階躍輸入信號R(s)=30且無擾動信號時進行仿真,通過改變被控對象模型的參數使過程增益為1.8、時間常數為110,此時被控對象模型處于失配狀態下,得到仿真輸出波形如圖4所示。
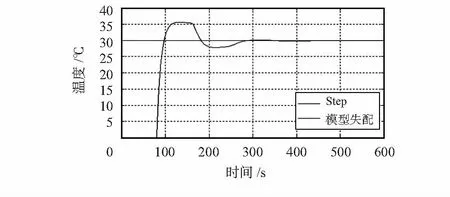
圖4 模型失配時的輸出波形Fig 4 Output waveform of model mismatch
由圖3與圖4的對比可知,系統在被控對象模型準確時響應速度很快,可以很快進入穩定狀態。而在系統被控對象模型發生變化時,系統會產生超調量且有振蕩現象發生,需要經過較長調整時間后才進入穩定狀態。故當被控對象模型失配時會對系統的控制效果產生不利影響。
2.3內模濾波器時間常數對系統的影響
外界擾動和被控對象模型失配均會對系統的控制效果產生不利影響,但是外界擾動與被控對象模型失配現象卻是客觀的存在,不能進行自主調整,而內模濾波器時間常數是可以自主進行調整的參數。
1)過程無擾動時,在圖3的基礎上通過改變Tf值的大小可獲得不同Tf值時的系統仿真框圖,取Tf值分別為1,5,15,18時,仿真得到輸出波形如圖5所示。
圖5 無擾動時Tf變化的輸出波形Fig 5 Output waveform of Tf changes without disturbance
從圖5可看出Tf的取值越小,系統的響應速度會越快;反之,Tf的取值越大,則系統的響應速度越慢。所以,Tf的取值對系統的響應速度有影響,如果對系統的響應速度進行考慮,則對于Tf值的選取應該越小越好。
2)在控制器輸出端加入20 %階躍擾動信號擾動時,取Tf值分別為10,20,30,100時,進行仿真,得到輸出波形如圖6所示。
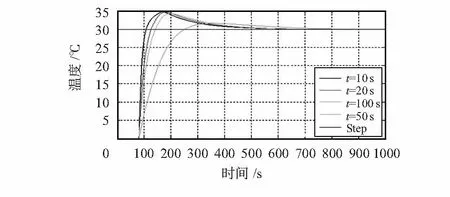
圖6 有擾動時Tf變化的仿真波形Fig 6 Simulation waveform of Tf changes with disturbance
3)通過分析可知,對于Tf值的選取,不能太大也不能太小,Tf選取的太大不能兼顧系統的響應速度;同理,如果Tf值選取太小又不能兼顧系統的魯棒性。所以,在進行Tf值的選取時,既需要考慮系統的響應速度同時也要周全系統的魯棒性。
當被控對象不變時,在系統無擾動和在控制器輸出端加20 %擾動信號的情況下,輸入給定信號R(s)=30時。在Matlab/Simulink仿真平臺中進行調試,比對不同Tf值時的控制效果。最終選取Tf=40時內模控制的溫度控制系統,其仿真框圖如圖7所示。
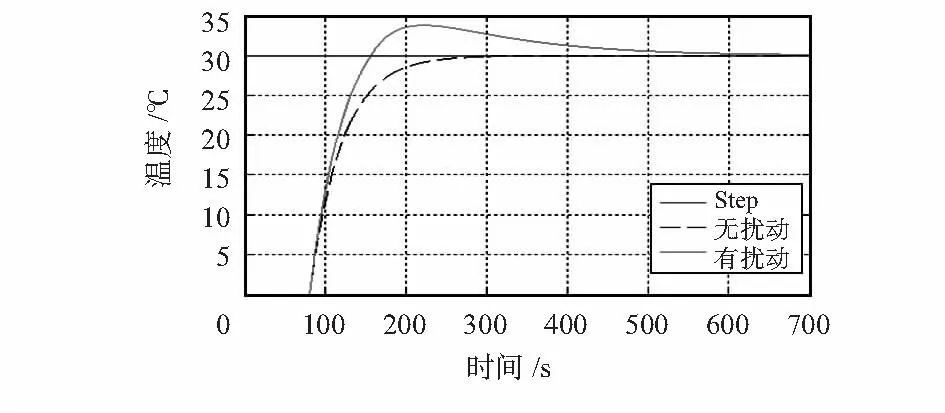
圖7 Tf=40時的輸出波形Fig 7 Output waveform of Tf=40
當Tf=40時,系統的控制效果比較理想,對于響應速度與魯棒性兩者均可以兼顧得到,不會過分偏重于某一方面。
3內模控制與PID控制效果比較
1)過程無擾動時控制效果的比較。當控制對象不變,系統沒有擾動且輸入階躍信號為R(s)=30時,對內模控制與PID控制均在最佳狀態下的溫度控制系統進行仿真分析,探討內模控制與PID控制的優越性,輸出波形如圖8所示。
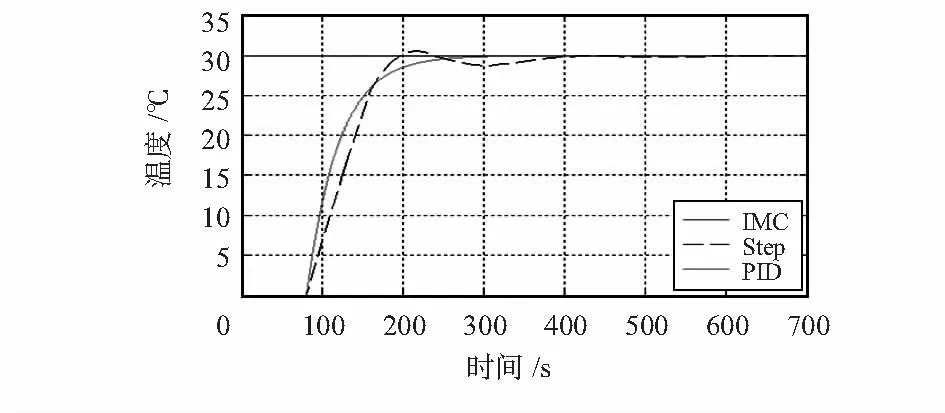
圖8 內模與PID控制在無擾動時輸出波形Fig 8 Internal model and PID control output waveform without disturbance
內模控制的響應速度比PID控制較快,且系統不會有超調現象出現,可以很快進入穩定狀態。而PID控制時系統則有一定的超調量出現,并需要一定的調節時間,最后才慢慢趨于穩定,在系統沒有擾動的情況下,內模控制比PID控制效果更為理想。
2)過程有擾動時控制效果的比較。當控制對象不變,系統輸入階躍信號為R(s)=30時,在控制器輸出端加20 %擾動信號探討內模控制與PID控制的優越性,在仿真平臺上搭建仿真框圖,輸出波形如圖9所示。
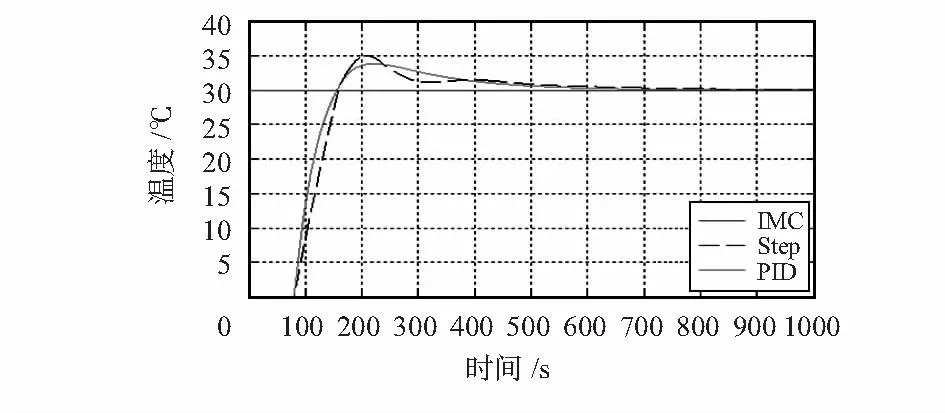
圖9 內模與PID控制在有擾動時仿真波形Fig 9 Simulation waveforms of internal model and PID control with disturbance
可以看出,在系統存在擾動的情況下,雖然兩種控制都存在超調量,但內模控制的系統超調量比較小,且調節時間比較小,而PID控制的超調量相對較大,且其調節時間相對較長。從圖9的仿真波形中還可以看出,內模控制的響應速度依舊比PID控制快,在系統存在擾動時內模控制依舊比PID控制的效果理想。
4結論
當系統存在擾動和被控對象模型失配時會對系統的控制效果產生不利影響;內模控制濾波器的時間常數對內模控制的響應速度與魯棒性均有著直接影響,當內模控制濾波器時間常數越大,系統的魯棒性越強;反之,系統的響應速度越快。通過對PID控制與內模控制的溫度控制系統進行性能比較分析,結果表明:PID控制對大時滯特性的溫度控制對象的控制效果不如內模控制,內模控制在響應速度與魯棒性方面均優越于PID控制。內模控制器的設計簡單、易于實現,且對大時滯特性的溫度控制對象的控制效果非常好。
參考文獻:
[1]王偉,張晶濤,柴天佑.PID參數先進整定方法綜述[J].自動化學報,2000,26(3):347-355.
[2]趙東亞,鄒濤,王治平.Smith 預估控制研究進展[J].化工進展,2010,29(8):1406-1409.
[3]楊琳娟,李秋明,顧德英.大林算法在爐溫控制中的應用[J].儀器儀表學報,2005,26(8):2253-2254.
[4]Sun Zhaoping,Chen Juan,Zhu Xiangting.Multi-model internal model control applied in temperature reduction system[C]∥2014 11th World Congress on Intelligent Control and Automation(WCICA),IEEE,2014:247-250.
[5]戴文戰,丁良,楊愛萍.內模控制研究發展[J].控制工程,2011,18(4):487-495.
[6]高金源,夏潔.計算機控制系統[M].北京:清華大學出版社,2007:215-234.
[7]王佳偉,楊亞非,錢玉恒.基于內模控制的工業控制系統仿真器魯棒PID控制器設計[J].實驗室技術與管理,2015,32(1):120-123.
[8]王樹清.先進控制技術及應用[M].北京:化學工業出版社,2001:184-213.
[9]杜文嫚,韓璞.鍋爐主蒸汽溫度控制系統預測控制設計與仿真[J].計算機仿真,2013,30(7):392-395.
[10] Alberto Isidori,Lorenzo Marconi,Laurent Praly.Robust design of nonlinear internal models without adaptation[J].Automatica,2012,48(10):2409-2419.
[11] 楊大勇,李鳴.內模控制在電加熱爐溫度控制中的應用[J].微計算機信息,2008,24(10):42-43.
Application of internal model control in temperature control sensor system*
CHANG Feng,KUANG Wen-zhen,LU Shuai
(Key Laboratory of Opto-Technology and Intelligent Control,Ministry of Education,Lanzhou Jiaotong University,Lanzhou 730070,China)
Abstract:In order to adapt to requirement of reality for improving control effect,internal model control method is used in temperature control sensor system,complete design of temperature control system based on internal model control.Aiming at temperature control object with large delay,complete temperature control system design based on internal model control;for same large time-delay temperature control object,complete design of temperature control system based on PID control,and the designed temperature control system is simulated and analyzed on Matlab/Simulink simulation platform.Simulation result show that control effect of time constant of internal model control filter on system are studied,and internal model control effect is verified,superior to that of PID control.
Key words:temperature control;internal model control;large delay;PID control
DOI:10.13873/J.1000—9787(2016)05—0149—05
收稿日期:2015—08—30
*基金項目:甘肅省青年科技基金資助項目(1308RJYA096,145RJYA251);甘肅省高校科研項目(2013A—050)
中圖分類號:TP 23
文獻標識碼:A
文章編號:1000—9787(2016)05—0149—05
作者簡介:
常峰(1989-),男,甘肅蘭州人,碩士研究生,主要研究方向為交通信息工程與控制。