無線PIR的人體目標追蹤方法研究綜述
2016-06-24 00:30:08王子豪魏玉宏
傳感器與微系統 2016年4期
王子豪, 田 杰, 魏玉宏
(武警工程大學 軍事通信學重點實驗室,陜西 西安 710086)
無線PIR的人體目標追蹤方法研究綜述
王子豪, 田杰, 魏玉宏
(武警工程大學 軍事通信學重點實驗室,陜西 西安 710086)
摘要:基于無線熱釋電紅外傳感器(PIR)的人體目標追蹤過程分為五步:事件檢測、事件數字化、事件登記、目標定位、軌跡推斷。研究的方向主要是在事件檢測過程中的數據采集和信號處理,在事件登記中的區域分割編碼,在目標定位中的數據處理,以及在軌跡推斷中的數據融合和軌跡預計。闡述了側視感知模式和俯視感知模式的實現原理,分析了解決主要問題所運用的方法,對比兩種感知模式的實驗結果,分析兩種感知模式的優缺點,并據此討論了改進方向。
關鍵詞:無線傳感器網絡; 熱釋電紅外傳感器; 人體目標追蹤
0引言
無線傳感器網絡(WSNs)具有覆蓋范圍廣、體積小、功耗低和網絡動態特性好等優點,逐漸被應用于目標定位和追蹤領域[1]。熱釋電紅外(PIR)技術利用人體輻射出特定波長紅外線的特點,能靈敏地接收紅外光并將光信號轉換為電信號[2]。基于無線傳感器網絡和PIR技術的人體追蹤方法僅需要部署價格低廉的傳感器節點,而且傳感器節點僅針對人體目標,具有成本低、功耗低、數據吞吐量低和針對性強的優點,適用于人體目標追蹤。
本文對基于無線PIR的人體目標追蹤方法研究進行綜述,并討論了其發展方向。
1人體目標追蹤步驟
人體目標追蹤包含五個步驟:事件檢測、事件數字化、事件登記、目標定位、軌跡推斷。
1)事件檢測:在人體目標追蹤中,當PIR測量到的熱量流高于設定的環境閾值,則這個信號就可以反映出有人體目標在監測范圍內運動,這個信號稱之為事件。
2)事件數字化:當人體目標在監測范圍內運動時,其周圍的傳感器節點都會產生模擬電信號,后續處理需要將模擬信號數字化。
3)事件登記:根據不同傳感器節點的視場,可以把監測區域劃分為多個子區域。用一系列的數字序列來表示每一個事件。系統的后臺數據庫會按照時間順序登記節點檢測得到的事件發生序列。
4)目標定位:根據數據庫中的事件序列,結合同一時刻不同傳感器節點的事件序列,用網格逼近、最小二乘法等方法推斷目標的位置。
5)軌跡推斷:目標追蹤問題可以看作為部分可觀測馬爾科夫決策過程(partially observable Markov decision process,POMDP),利用先前的數據結合當前的檢測數據,估計目標
運動軌跡。
2基于無線PIR網絡的人體目標追蹤方法
按照傳感器節點感知模式劃分,基于無線PIR的人體目標追蹤方法可以分為側視感知模式和俯視感知模式。其研究的方向主要有事件檢測過程中的數據采集與信號處理[3],在事件登記中的區域分割編碼[4],在目標定位中的數據處理,以及在軌跡推斷中的數據融合[5]和軌跡預計。
2.1側視感知模式
2005年,Hao Qi博士等人最早研究了PIR用于人體運動檢測的可行性,并持續探究將PIR應用于人體目標追蹤的方法,在區域分割編碼、數據采集和數據處理上得到大量的研究成果。
文獻[6]研究了一種無線PIR系統,該系統由三種節點組成,分別為slave節點、master節點和host主機。slave節點分布在整個探測區域,由8個傳感器單元組成,實現360°的視場覆蓋,它們負責事件檢測、事件數字化和事件登記,并把處理得到的數據傳送到master節點。master節點有一個,負責時間同步和目標定位,并把數據傳送到host主機。host主機得到數據后,進行數據融合。在事件數字化中,由于每個節點有8個傳感器單元,可以把360°的視場分割為16個區域,用8位二進制數對應8個傳感器單元,以此記錄區域的編號,哪個傳感器單元探測到目標,則其對應二進制位上置1;否則,置0。其區域分割編碼如圖1所示。這樣利用2個或以上的節點形成部分重疊的探測區域,就可以較為準確地探測目標位置,理論上,節點數量越多,目標定位精度越高。在目標定位上,使用了網格逼近(grid approximation)的方法進行線性化角度的測量值,推斷目標位置。在仿真環境為9 m×9 m的房間里,在誤報率為0.001的條件下,高斯粒子濾波的標準差為x軸方向1.1 m,y軸方向1.2 m,能基本實現人體運動追蹤,能應用于精度要求不高的室內環境。

圖1 單個slave節點的區域分割示意圖和對應的區域分割編碼方式Fig 1 Region segmentation diagram of single slave node and corresponding coding method of region segmentation
文獻[7]研究了一種基于無線PIR網絡的多代理(multi-agent)方案來實現人體目標追蹤并實現自校準。方案中包含4類代理(agent),分別為感知代理(sensing agent)、行動代理(action agent)、決策代理(decision agent)和數據庫代理(database agent)。感知代理由PIR、信號處理電路和可編程片上系統(PSoC)組成,實現了事件檢測、事件數字化、事件登記和目標定位功能。行動代理由伺服電動機和PSoC組成,它改變感知代理的視場,使感知代理對目標實現持續不間斷的監測。決策代理包含了現場可編程門陣列(FPGA),它負責執行復雜的計算和高分辨率的多目標追蹤和自校準。數據庫代理使用了MySQL平臺,為其他代理提供環境信息。此方案中使用了PSoC,大大增強了節點的計算能力,并通過PSoC控制感知代理動態監測目標,使得追蹤針對性更強。此外,利用感知代理不斷收集環境信息,存儲在數據庫代理中,在目標追蹤過程中,利用環境信息能減少大量干擾,使得計算更為準確。再加上決策代理的自校準功能,進一步提高了追蹤精度。
文獻[8]中,Yang Bo等人提出了基于PIR視場角平分線的目標定位方法和新的數據融合方法,并在軌跡推斷過程中對比了卡爾曼濾波和粒子濾波的效果。在仿真實驗中,通過對比多種傳感器部署方案和網狀網結構,總結得出一種性能次優但計算復雜度低的網狀結構,在10 m×10 m的區域中部署了8個傳感器節點,其定位誤差小于0.5 m的概率高于80 %,誤差大于1 m的概率低于20 %,誤差大于1.5 m的概率更是低于5 %。
文獻[9]中,Yang Bo等人在無線PIR網絡的基礎上,將概率神經網絡(probabilistic neural network,PNN)和測向交叉定位(bearing-crossing locating)應用于區域分割和目標定位中。首先,通過綜合的神經網絡分類器算法初步確定人體目標所在的區域,再結合測向交叉定位數據進行數據融合實現目標的精確定位,最后,利用粒子濾波算法和聯合概率數據關聯算法對目標進行追蹤。仿真和實驗結果表明:此方法能快速判斷人體目標所在區域,而且在多目標時錯誤探測率得到了有效的降低。在實際實驗中,在10 m×10 m的環境里,使用基于神經網絡區域劃分的交叉定位(crossing location based on neural network region partition,CLBNNRP)方法平均誤差為0.71 m,對比交叉定位(crossing location,CL)方法,使用CLBNNRP方法在x軸方向和y軸方向的精確度提高了29.76 %和44.12 %,證明使用CLBNNRP方法能實現精度較高的目標追蹤。
2.2俯視感知模式
文獻[10]中,基于無線PIR網絡,黃鑫研究了新的人體目標定位方法,將傳感器節點設置在探測區域的上方,每個傳感器節點中包含3只傳感器,每個節點的感知區域分為3個,1只傳感器負責感知一個區域,如圖2所示。

圖2 傳感器的感知區域Fig 2 Sensing region of sensor
圖中白色區域為感知區域,1#傳感器感知圓心的圓形區域,2#傳感器感知中間的圓環,3#傳感器感知最外圍的圓環。根據3個或以上節點,形成重疊區域,可以初步定位目標所在位置,感知范圍如圖2所示。

圖3 感知范圍示意圖Fig 3 Diagram of sensing area
圖4中展示了一組節點組成的感知區域,深灰色為3個傳感器節點的重疊區域,當布置更多的節點時,重疊區域可擴展得更大。根據實驗結果,在邊長為3 m的等邊三角形區域里,節點部署高度為3 m,此方法的誤差在0.32 m左右。此方法利用了區域圓環分割和多個節點重疊區域形成監控區域,提高了精度。但此方法理論上沒有考慮到人體目標的身高對測量的影響。
文獻[11]中,Luo Xiaomu等人研究了一種新的俯視感知的紅外傳感器系統,其中每個節點包含5只傳感器,每4個傳感器節點為一組,如圖4所示。
每個傳感器節點的探測區域可劃分為8個扇形和1個圓形區域,每個探測區域中心位置都設置一個方位已知的指示器。當目標進入一個探測區域時,便會激活該區域的指示器。當目標所在探測區域只激活一個指示器時,用指示器的坐標近似目標坐標;當目標所在探測區域激活2個指示器時,用兩指示器連線的中點近似目標坐標;當目標所在探測區域激活3個指示器時,用與3個指示器相等距離的點坐標近似目標坐標;當目標所在探測區域有4個指示器時,利用最大似然估計計算目標坐標。仿真中使用了高1.75 m,半徑0.45 m的圓柱體機器人作為目標,在10 m×10 m的區域內部署了一組節點,其平均誤差為0.486 m。
2.3對比分析
如表 1所示,上述文獻中方法的實驗結果對比。在側視感知模式當中,文獻[8]基于無線PIR網狀網,對比了3種節點部署方案,方案B的節點部署使得多個傳感器節點的區域分割更加分散,當其部署8個傳感器節點,實現了10 m×10 m范圍內,對單目標的定位精度比文獻[9]中方法提升將近50 %。后續可以在探測錯誤率一定的情況下,研究區域分割的方法和節點的部署。
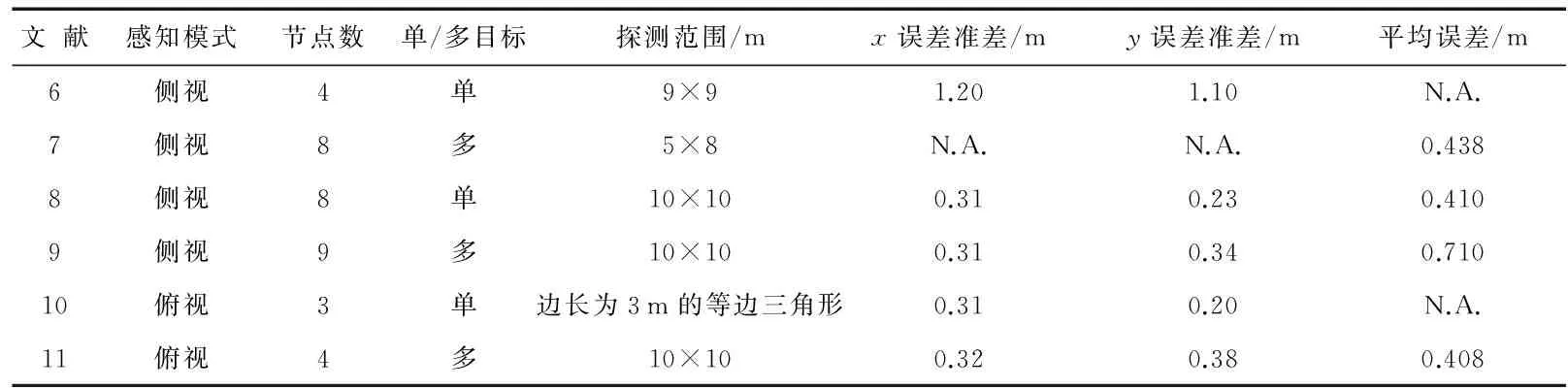
表1 各文獻中方法對比
文獻[9]實驗中部署9個節點,在10 m×10 m范圍內,利用神經網絡分類器確定目標所在區域,再利用交叉測向定位對目標進行精確定位,而后利用粒子濾波算法和聯合概率數據關聯算法進行軌跡推斷,實現了對兩個目標的較高精度檢測。后續可以在神經網絡分類器算法和目標定位算法上做進一步研究。
在俯視感知模式中,文獻[11]中研究了新的俯視感知模式及節點部署方案,比文獻[10]中的方法,在標準差誤差相差不大的情況下,使用了4個傳感器節點實現了10 m×10 m范圍內對多目標追蹤的高精度追蹤,更符合實際應用的需求。
對比本文討論的最優的側視感知模式中的方案和最優的俯視感知模式中的方案,即文獻[9]與文獻[11]中所研究的方案,俯視感知模式部署傳感器節點更少,節點包含5只PIR傳感器,少于側視感知模式中的8只PIR傳感器,在10 m×10 m范圍內對多目標追蹤,標準差誤差較為接近,平均誤差小于側視感知模式,證明了俯視感知模式的性能優越性。但在俯視感知模式中并未充分考慮不同人體目標的高度所帶來的影響,且在節點部署高度對探測范圍、精度的
影響仍需做進一步研究。而側視感知模式節點部署的高度與人同高,部署位置更為靈活。綜上所述,側視感知模式部署更為靈活,而俯視感知模式在監測范圍和追蹤精度上有更大優勢。
3結束語
基于無線PIR的人體目標追蹤方法的研究還處于起步階段,還需要做更多的研究和改進以適應更多的使用場景和實際需求。在側視感知模式中,可以通過仿真實驗對比多種區域分割及節點部署的方法,篩選出目標定位精度高的區域分割方法和節點部署的方法。還可更深入研究基于概率神經網絡的交叉測向定位方法,根據交叉點的權重估算目標位置,進一步提高定位精度。對于室外部署的節點,可以將環境信息記錄在數據庫并進行分析,對比目標信息與環境信息的差異,大幅度減少干擾。在俯視感知模式中,可以研究無線PIR節點部署的高度對探測范圍大小和定位精度高低的影響,設置專門測量目標高度的節點,進而減少目標高度的個體差異對定位精度的影響。
參考文獻:
[1]Kim S,Ko J G,Yoon J,et al.Multiple-objective metric for placing multiple base stations in wireless sensor networks[C]∥2007 2nd International Symposium on Wireless Pervasive Computing,ISWPC’07,IEEE,2007:627-631.
[2]Zappi P,Farella E,Benini L.Pyroelectric Infrared sensors based distance estimation[C]∥2008 IEEE Conf on Sensors,2008:716-719.
[3]Shankar Mohan,Burchett J B,Qi Hao,et al.Human-tracking systems using pyroelectric infrared detectors[J].Optical Enginee-ring,2006,45(10):106401.
[4]Lu Jiang,Gong Jiaqi,Hao Qi,et al.Space encoding based compressive multiple human tracking with distributed binary pyroelectric infrared sensor networks[C]∥IEEE Conference on Digital Object Identifier,2012:180-185.
[5]Khaleghi B,Khamis A,Karray F O,et al.Multisensor data fusion:A review of the state-of-the-art[J].Information Fusion,2013,14(1):28-44.
[6]Hao Qi,Brady D J,Guenther B D,et al.Human tracking with wireless distributed pyroelectric sensors[J].IEEE Sensors Journal,2006,6(6):1683-1696.
[7]Lu Jiang,Gong Jiaqi,Hao Qi,et al.Multi-agent based wireless pyroelectric infrared sensor networks for multi-human tracking and self-calibration[C]∥2013 IEEE Conf on Sensors,IEEE,2013:1-4.
[8]Yang Bo,Luo Jing,Liu Qi.A novel low-cost and small-size human tracking system with pyroelectric infrared sensor mesh net-work[J].Infrared Physics & Technology,2014,63:147-156.
[9] Yang Bo,Li Xiaoshan,Luo Jing.A novel multi-human location method for distributed binary pyroelectric infrared sensor tracking system:Region partition using PNN and bearing-crossing loca-tion[J].Infrared Physics & Technology,2014,68:35-43.
[10] 黃鑫.熱釋電紅外無線傳感器網絡人體定位系統設計與實現[D].廣州:中山大學,2009.
[11] Luo Xiaomu,Shen Baihua,Guo Xuemei,et al.Human tracking using ceiling pyroelectric infrared sensors[C]∥2009 IEEE International Conference on Control and Automation,ICCA 2009,2009:1716-1721.
Review of human body target tracking methods based on wireless PIR
WANG Zi-hao, TIAN Jie, WEI Yu-hong
(Key Laboratory of Military Communication,Engineering University of CAPF,Xi’an 710086,China)
Abstract:Process of human body target tracking based on wireless pyroelectric infrared(PIR)sensor can be divided into five steps,which are event detection,event digitalization,event registration,target location and trajectory estimation.Research direction is mainly focused on data collection and signal processing in event detection process,region-segmentation coding in event registration,data processing in target location,as well as data fusion and trajectory prediction in trajectory estimation.Illustrate realization principles of side-view sensing mode,and top-view sensing mode,analyze method for solving main problems and compare experimental results of the two kinds of sensing modes,analyze the advantages and disadvantages of two sensing modes and discuss improving direction according to the analysis.
Key words:WSNs; pyroelectric infrared(PIR) sensor; human body target tracking
收稿日期:2015—08—26
DOI:10.13873/J.1000—9787(2016)04—0008—03
中圖分類號:TP 393
文獻標識碼:A
文章編號:1000—9787(2016)04—0008—03
作者簡介:
王子豪(1991-),男,廣東廣州人,碩士研究生,主要研究方向為無線傳感器網絡。
