氣動教學機械手的開發與開放實驗應用
2016-06-20 06:32:30唐德棟韓天泉張雪亮
大學教育 2016年5期
唐德棟+韓天泉+張雪亮
[摘 要]根據機械手的控制要求,進行可編程序控制系統的輸入/輸出地址分配,利用順序控制的方法實現控制系統的軟件設計。分析設計氣動教學機械手的結構及氣壓驅動系統。氣動教學機械手的開發過程與開放實驗項目結合,可以提高學生的獨立科研能力,激發學生的創新潛能,為學生的創新、創業奠定堅實基礎。
[關鍵詞]機械手;可編程序控制;開放性實驗;創新訓練
[中圖分類號] TP241.3 [文獻標識碼] A [文章編號] 2095-3437(2016)05-0146-02
現代工業技術中,隨著液壓與氣壓傳動及機械手的迅速發展和廣泛應用,各高校已經認識到其相關技術及人才培養的重要性和緊迫性。[1]氣動教學機械手是機電一體化技術的典型代表產品,涉及機械設計及制造技術、可編程序控制技術、氣壓驅動技術、傳感器技術等。本文設計了一種氣動教學機械手,它作為機電一體化集成技術的教學載體,提供了一個開放、創新的綜合教學平臺,可以用于機械設計、機電一體化系統設計、機器人、氣壓傳動等課程的理論教學演示及實驗教學操作。[2]
一、機械手的結構方案設計
教學機械手設計為三個自由度,分別為腰部回轉運動(周向),大臂伸縮運動(徑向),小臂升降運動(軸向)。其具體結構如圖1所示。
其中腰部的回轉通過擺動氣缸實現,手臂伸縮及手腕的升降通過直線氣缸實現,直線氣缸選用了多軸結構,保證了機械手的運動精度與剛度,并具有防扭轉的效果,手爪的開合通過單獨的氣缸驅動。機械手采用了模塊化的設計理念,各個模塊獨立于整體,每個氣缸可以單獨控制,互不干涉。
二、機械手的氣壓驅動系統設計
氣壓系統中方向控制閥可以通過改變閥芯位置,使氣流流過不同的通道而改變氣流運動方向。本文采用的方向控制閥為三位五通電磁換向閥,分別控制四個氣缸的伸縮[3],實現機械手腰部、大臂、小臂及手爪的相應動作,每個氣缸缸體安裝兩個磁性感應開關,用于檢測氣缸的極限位置。[4]由于手爪模塊所需控制精度高,工作壓力小,在該氣缸的控制回路上安裝了減壓閥,確保手爪抓緊與松開的可靠性。為了保證機械手運動的平穩性,每個氣缸的進出口均安裝了單向節流閥,可實現氣缸運動速度的連續調整。綜上所述,氣壓系統回路如圖2所示。
三、機械手的可編程控制系統設計
1.機械手的動作順序
機械手將工件從A點搬運至B點,其具體的動作順序為:機械手大臂伸出、小臂下降、手爪夾緊工件、腰部順時針旋轉90°、大臂縮回、手爪松開、小臂上升、腰部逆時針旋轉90°回到原點位置。
2.輸入/輸出地址分配
根據機械手輸入輸出量的特點及數量,控制系統采用西門子S7-200系列CPU226型可編程控制器。表1為機械手控制系統的輸入/輸出地址分配表。
三、控制系統軟件設計
為了滿足教學實驗的需求,將氣動機械手設置為多種工作方式,包括手動和自動工作方式。改變機械手的控制流程軟件程序,可以方便快捷的改變機械手的動作順序。可編程控制器的程序由1個主程序及4個子程序組成。四個子程序分別為公用程序、手動程序、回原點程序及自動程序。其中自動程序包含三種功能,單步動作、單周期動作、連續動作。[5]公用程序用于處理各種方式都要執行的任務,以及處理不同工作方式之間的轉換。手動程序設計時,為了保證機械手的安全運行,需要設定一些必要的互鎖,防止動作相反的兩個輸出同時接通。回原點程序是基于自動程序的順序控制實現的,通過相應指令控制機械手自動回到原點處。執行單步運動時,運動過程及動作與連續運動相同,每按下一次起動按鈕,執行一步活動后停止。執行單周期運動時,程序執行完一個完整周期后便停止。單周期動作與連續動作通過連續標志位進行區別,控制連續標志位的梯形圖程序采用起保停電路。通過轉換允許標志位實現單步功能,其控制電路由起動按鈕與正跳變觸點指令串聯而成,在自動程序的梯形圖中,每步起動電路中均串聯轉換允許標志位的常開觸點,可實現機械手的單步控制。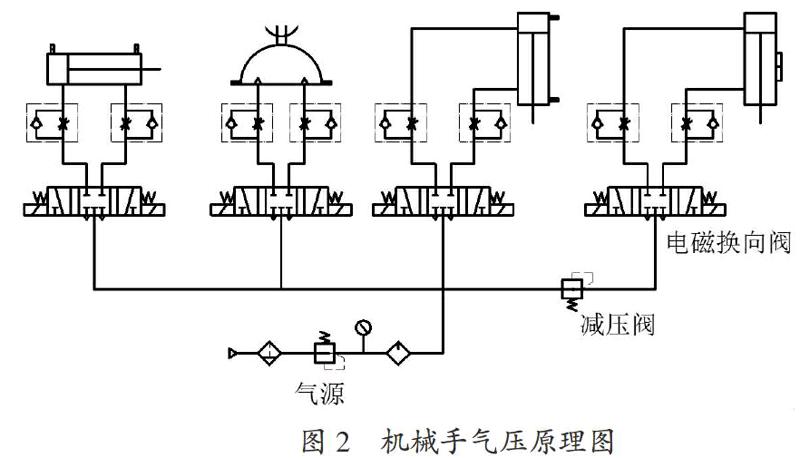
四、開放實驗教學的實踐與效果
結合氣動機械手的開發進行了開放性的實驗教學,學生參與實驗之前,需要掌握機械設計、氣壓系統設計、可編程控制器原理等相關的技術基礎課。將參與實驗的學生分成三個小組,分別為機械設計調試組、氣壓系統設計組、控制系統設計組。機械設計調試組主要完成機械手標準件的選型及購買,非標件的設計及加工,所有零部件齊備后,進行裝配及調試。氣壓系統設計組主要完成機械手所有執行元件的驅動系統設計,并根據設計的氣壓系統原理圖選擇相應的氣壓元件進行搭接及調試。控制系統設計組主要完成機械手可編程控制器輸入/輸出地址的正確分配,利用順序控制的設計方法編制合理的控制程序,軟件仿真驗證合理后,下載至可編程序控制器中,正確連接可編程控制器的外部接線,進行控制系統的調試。各組可根據教師布置的任務,分別獨立完成自己負責部分工作的設計、仿真、調試等工作。三個小組調試成功后,由實驗項目的總負責人,協調所有學生完成機械手的機、電、氣系統的綜合調試工作。開放實驗的過程中,學生們遇到了很多實際的問題,比如機械設計調試組,一開始選擇的氣缸型號市場上很難買到,根據工況重新選擇了常用的型號;設計的手爪與小臂氣缸的連接板實際裝配時出現了干涉的錯誤,需重新進行修改;機械手驅動系統連接成功后,發現機械手運動過程中沖擊較大,氣壓系統設計組與控制系統設計組聯合調試,最終實現了機械手的平穩運動。三個小組的學生既有分工又有合作,在確定方案、詳細設計、實驗調試的過程中,鍛煉了縝密思維、協同創新、團隊合作的科研攻關能力。開發的機械手現主要用于機械、機電等專業的理論及實驗教學。機械手結構簡單,控制系統可靠,動作方式多樣,操作及調試方便。通過該裝置的開發、調試及演示,學生們對機電一體化系統設計、機器人基礎、機電傳動控制、液壓與氣壓傳動、可編程序控制器等課程的理解可以更加直觀及深入,大大提高了專業課程的教學效果和學生的動手及創新能力。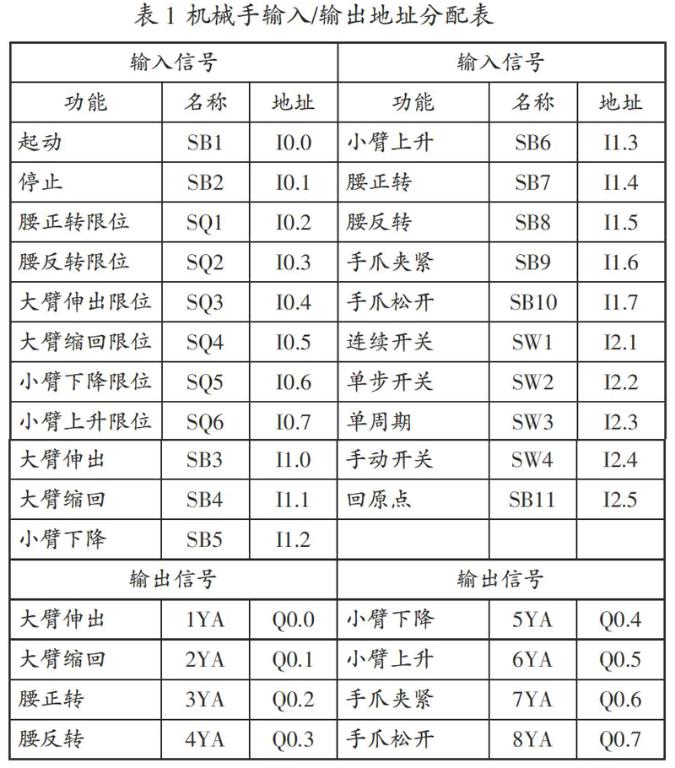
[ 注 釋 ]
[1] 王翠艷,吳文江,高占鳳,等.機電一體化創新教育探索與實踐[J].中國電力教育,2010(4):154-155.
[2] 張燕,史留勇,劉世豪.基于社會需求的機電一體化專業實驗教學改革[J].中國電力教育,2014(29):75-76.
[3] 左健民.液壓與氣壓傳動[M].北京:機械工業出版社,2013.
[4] 唐德棟.基于Festo實驗臺氣動綜合實驗的開發[J].機床與液壓,2006(4):109-110.
[5] 廖常初.PLC編程及應用[M].北京:機械工業出版社,2014.
[責任編輯:鐘 嵐]
