基于電力載波的智能LED燈控制系統設計
2016-06-16 01:33:47趙建平邵建龍昆明理工大學信息工程與自動化學院昆明650051
微處理機 2016年2期
趙建平,邵建龍,陳 廣,張 燚(昆明理工大學信息工程與自動化學院,昆明 650051)
?
基于電力載波的智能LED燈控制系統設計
趙建平,邵建龍,陳 廣,張 燚
(昆明理工大學信息工程與自動化學院,昆明650051)
摘 要:針對目前常規的LED燈控制系統存在通信距離近、成本高、操作復雜等缺點,設計了一種基于電力載波通信的智能LED燈控制系統。該系統基于C8051F411單片機實現了電力載波通信,并借助Modbus協議及自擴展的Modbus協議,在不改變原有電力線和E27螺口燈泡的情況下,即可進行對LED燈開關控制、256級亮度控制及故障自檢操作,適用于在一個變壓器回路中需要對最多247只LED燈的燈光進行更遠距離亮度控制和準確控制的場合。實驗結果表明該系統具有操作簡單、性能穩定等特點。
關鍵詞:電力載波;智能LED;故障自檢;控制器;E27螺口;Modbus協議
1 引 言
近年來,隨著大功率白光LED技術的發展,照明產業開始面臨新的機遇與挑戰。LED越來越多地被應用于通用照明領域[1],在遠程抄表、路燈智能控制等遠程控制系統中得到廣泛應用[2]。LED照明的智能化程度還不夠高,在場景控制和燈光亮度調節方面技術還不夠成熟[3-4],而且存在無故障自檢功能、維護不便,靈活性低,可擴展性差等問題[5-6]。
公知的電力載波技術通常是單獨作為通信技術來使用的,由它構成的電力載波LED燈控制系統還需要增加MCU微處理器,進行相應編程,導致成本增加,且控制距離在一個變壓器回路中不能超過1km[7],不能滿足對遠距離燈光進行準確控制的要求。基于上述背景,設計了一種基于電力載波通信的智能LED燈控制系統。該系統充分利用了Silicon Labs公司的C8051F411單片機高速、高可靠性、低功耗、超強抗干擾性、豐富的外圍模塊等性能特點,實現了對LED遠程開關控制、燈光調節、燈光故障檢測和通信等多項功能,同時性能穩定,成本低。
2 系統總體設計
2.1控制系統構成及其工作原理
基于電力載波通信的智能LED 燈控制系統結構框圖如圖1所示,該系統總體設計由主控制器和各個照明點處的智能LED燈組成。主控器通過220V電力線與各個照明處的智能LED燈連接,利用現有的電力線,通過載波方式將高頻數字信號加載到電力線上,用電力線實現控制器與各個照明點處的智能LED燈的數據傳輸,因此電力線不僅為設備提供了電源,也提供了信息通信的途徑[8]。主控制器和各照明點處被控的智能LED燈采用相同的異步串行通信協議Modbus,在僅有一個主控制器的情況下可以同時對多個電力載波智能LED燈進行控制。在正常情況下,當主控制器發出Modbus命令時,通過電力載波模塊將信號耦合到電力線上,經電力線傳輸到所有連接在電力線上的電力載波智能LED燈,通過它們的電力載波模塊將信號解調,經過單片機識別處理串行數據之后進行相應操作并將開關狀態和反饋信號傳回到主控制器,主控制器根據接收到的串行數據即可知道所要操作的電力載波智能LED燈是否按照了命令要求執行。
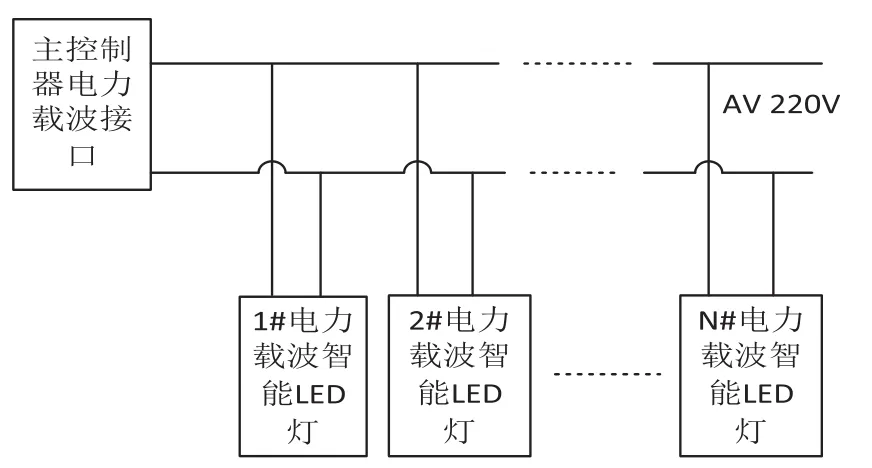
圖1 智能LED燈控制系統結構框圖
2.2電力載波智能LED燈組成
電力載波智能LED燈的組成框圖如圖2所示。
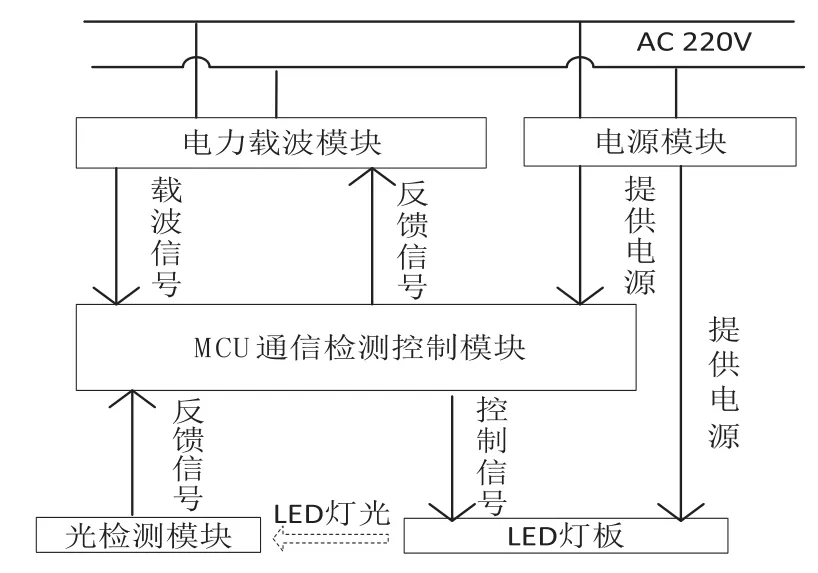
圖2 電力載波智能LED燈的組成框圖
智能LED燈主要由MCU通信檢測控制模塊、電力載波模塊、電源模塊、光檢測模塊、LED燈板組成。MCU通信檢測控制模塊主要負責LED輸出控制、PWM調光控制、采集光檢測模塊的反饋信息以及與主控制器的通信控制;電力載波模塊主要負責調制解調在電力線上的載波信號;光檢測模塊主要負責檢測LED燈亮滅狀態以及LED故障檢測。
3 控制系統的硬件設計
3.1MCU控制電路
MCU控制電路如圖3所示,采用了Silicon Labs公司的C8051F411高性能單片機為控制核心。C8051F411具有高集成性能,集成了高精度可編程的內部振蕩器、32KB片內FLASH存儲器等豐富的外圍模塊[9]。結合其內部集成的可編程計數器陣列(PCA)提供增強的定時器功能,產生電力載波模塊在電力線信號正負過零點處時發送的120HKz載波信號以及混頻解調所需的600KHz、460KHz高頻方波信號。C8051F411具有的交叉開關功能使得控制系統的軟硬件設計變得更加靈活和方便。
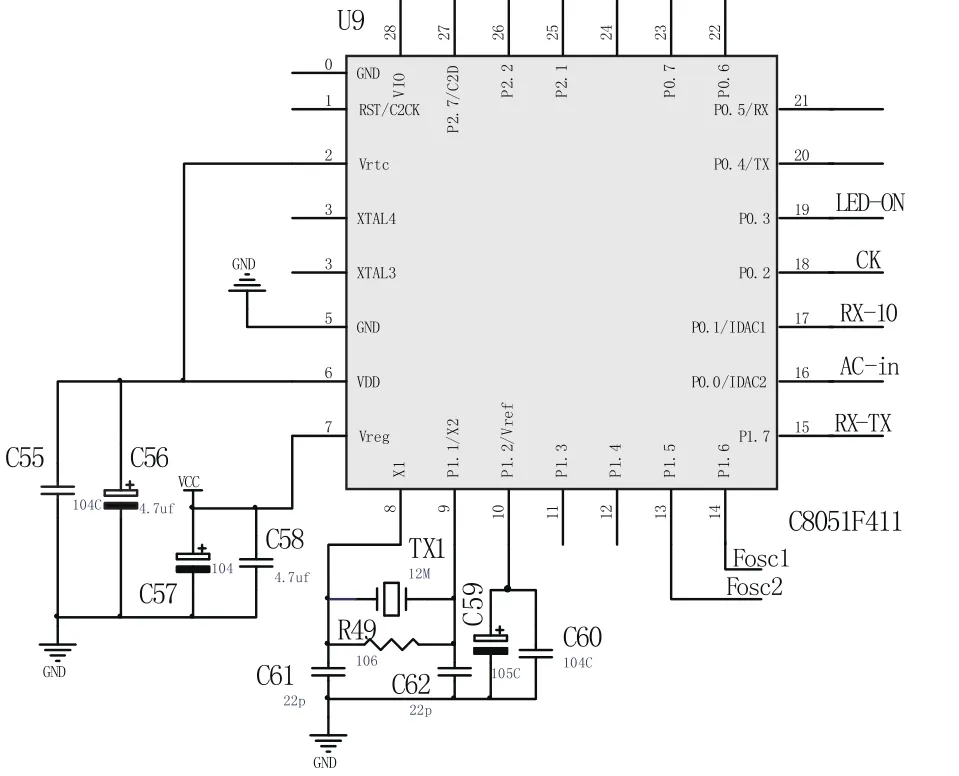
圖3 MCU控制電路
3.2電力載波模塊電路
電力載波模塊電路如圖4所示,電力載波模塊發送時,由MCU通信控制檢測模塊的檢測單片機檢測到AC_in在電力線信號正負過零點(即下降沿)時根據需要串行傳輸的信號,按照為1產生120KHz信號,為0不產生的原則將信號由RX-TX輸出120KHz的信號,通過發送濾波電路后利用耦合電路把信號耦合到T4上,實現載波信號調制耦合到電力線上,同時實現強電側和弱電側的電氣隔離。接收時,來自電力線上的120KHz載波信號經過高頻耦合線圈T4在經過諧振選頻電路、濾波電路將120KHz的載波信號連接到單片窄帶調頻接收芯片的RF_in(即U8的16管腳),再與單片機產生的600KHz信號、460KHz信號進行混頻差頻,所產生的20KHz差頻信號從U8的10管腳輸出,再經過低通濾波電路產生的脈沖信號接到單片機的I/O口,通過單片機實現串行載波信號的解調接收。
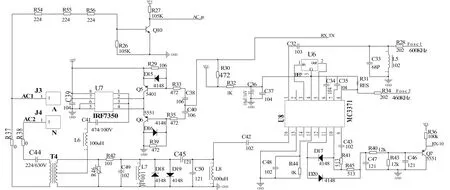
圖4 電力載波模塊電路
3.3其他電路
電源模塊電路如圖5所示,電源電路的AC1、AC2輸入電壓接到220V電力線上,通過電容C63,電阻R57分壓和限流之后接到整流芯片DB2交流輸入管腳3、4上,DB2輸出V +電壓,經過場效應管Q1接到16V穩壓管Z1,得到16V電壓,再接到三端穩壓芯片78L05輸出5VDC電壓。
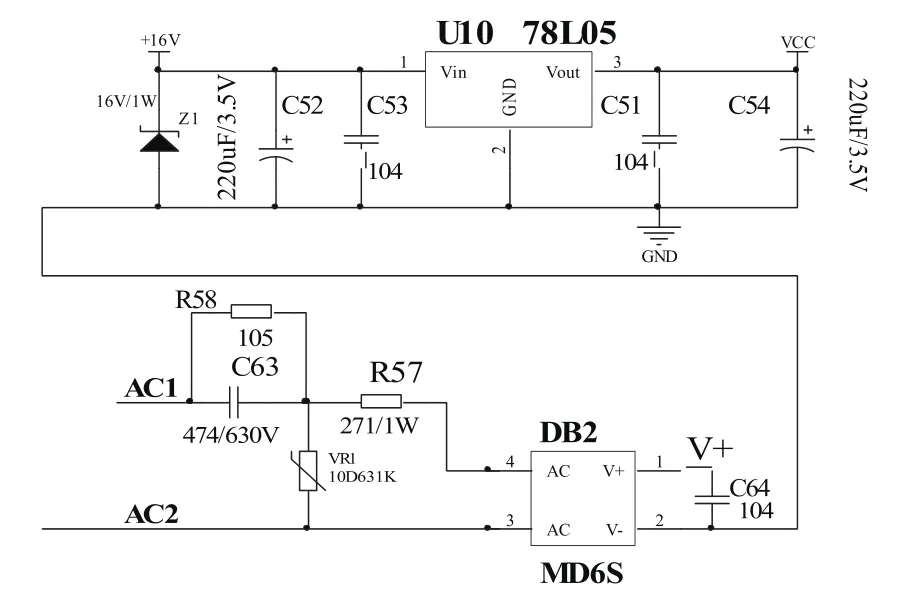
圖5 電源模塊電路
LED燈板電路如圖6所示。
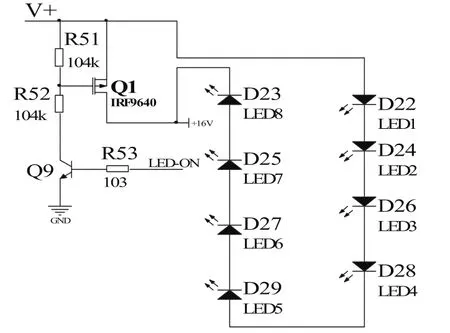
圖6 LED燈板電路
LED燈板采用發光二極管分別串聯起來再并接到場效應管Q1的漏極和源極,場效應管Q1的漏極和源極接到電源模塊的整流芯片直流輸出管腳即V +和16V的直流電壓上,三極管Q9的基極信號線LED-ON接到單片機C8051F411的I/O口,實現了通過單片機對LED燈的開關控制,同時I/O口輸出占空比從0.000~1.000可調的PWM脈寬調制信號時,LED燈的亮度就從最亮調節到熄滅。
光檢測電路采用光敏電阻經過三極管放大電路處理后,經過單片機C8051F411的A/D轉換采集處理,實現了光敏電阻檢測LED燈亮滅狀態和故障檢測。
4 控制系統軟件設計
C8051F411程序設計采用功能模塊化設計,包括Modbus通信模塊和應用控制模塊。Modbus通信實現與主控制器的數據或者命令的傳輸功能;應用控制程序主要負責執行主控制器通過Modbus傳輸的控制命令等功能。在接收主控制器發送信息時,電力載波模塊捕獲電力載波信號,解析處理后傳遞給單片機控制單元,經過單片機的分析處理之后輸出0.000~1.000可調的PWM脈寬調制信號,LED燈的亮度就從最亮調節到熄滅;同時可將光檢測電路的LED燈亮滅狀態和故障自檢信息發送到主控制器。其工作流程如圖7所示。
在該控制系統中,主控制器和各照明點處被控的智能LED燈采用相同的異步串行通信協議Modbus,在僅有一個主控制器的情況下可以同時對多個電力載波智能LED燈進行控制。主控制器和N只智能LED燈連接在同一個變壓器回路里,且最遠的智能LED燈離主控制器在電力線上的距離不超過1km,即主控制器發出的Modbus命令可以傳輸到每一個智能LED燈。當主控制器需要控制第2只智能LED燈時,發送以下06號Modbus命令如表1所示。序號a命令為全開2號燈,亮度為(1-0x00/0xFF)% 即100%;序號b命令為開2號燈,亮度為(1-0x40/0xFF)%即74.9%;序號c命令為全關2號燈,亮度為(1-0xFF/0xFF)%即0%。以上Modbus命令中第一個字節02為LED設備地址,即命令是發給2號燈的,只有2號燈接收到此命令會執行,其它燈因為地址不符,不理會此命令。第六個字節即是控制亮度的反占空比,最后兩個字節為CRC校驗碼。
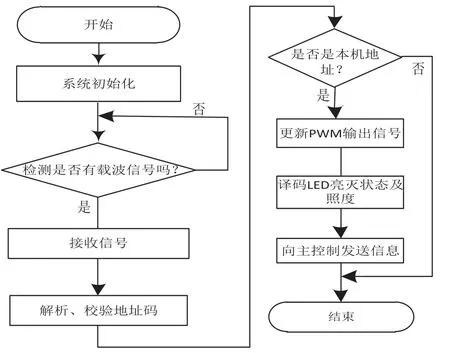
圖7 工作流程

表1 06號Modbus發送命令
當2號燈正確執行了命令并檢測到燈光,沒有故障后,它返回相應的06號Modbus應答信息如表2所示。序號a應答信息,即全開2號燈成功;序號b應答信息即開2號燈成功,亮度為74.9%;序號c應答信息即全關2號燈成功。當2號燈執行了命令但檢測不到燈光,有故障后,它返回相應的Modbus應答信息為:02 06 FF FF C9 ED。如果主控制器接收不到2號燈的返回信息,說明2號燈沒有接在電力線網絡里,或者已經出現通信問題,或者已經損壞。同理,主控制器通過Modbus協議依次對要進行控制的LED燈進行控制,最終實現對各照明點處的多個智能LED燈進行開關控制、256級亮度控制及故障自檢操作。
如果主控制器和N只智能LED燈連接在同一個變壓器回路里,相鄰兩只LED燈之間的距離不超過1km。但高序號的智能LED燈離主控制器的距離比較遠,不能直接接收到主控制器發出的Modbus命令,即主控制器發出的Modbus命令只可以傳輸到第一個智能LED燈,相鄰兩只LED燈之間又可以相互通信,則本系統通過如下Modbus自定義擴展協議的方法實現遠距離智能LED燈中繼控制。
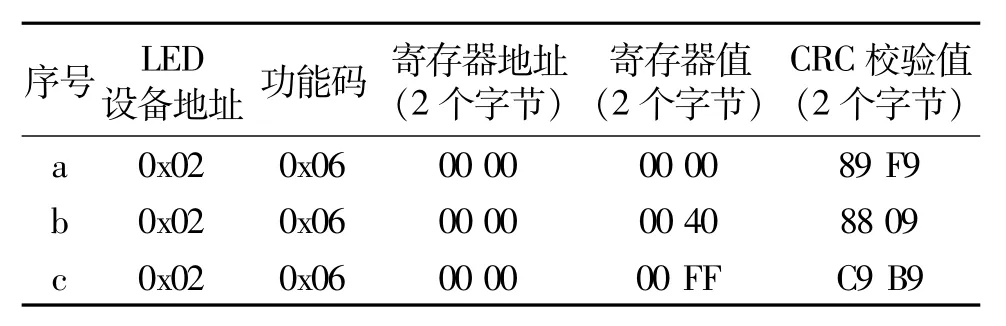
表2 06號Modbus應答信息
先用06號Modbus命令實現正向傳遞:
(1)addr06 11 01 00 XX,主控制器控制地址號為addr的LED燈亮度反占空比為XX的中繼命令,給01號LED燈發出命令。
(2)addr 06 11 02 00 XX,01號LED燈接收到主控制器發來的正向傳遞中繼命令,轉發給02號LED燈。
(3)addr 06 11 03 00 XX,02號LED燈接收到01號LED燈發來的正向傳遞中繼命令,轉發給03 號LED燈。
以上Modbus命令中第一個字節addr為最終要控制的LED燈的地址,第三個字節11為正向傳遞,第四個字節為下一個接收命令的LED燈地址,此處省略最后兩個字節的CRC校驗碼。接收到此命令的LED燈如果不是最終被控制的LED燈,它就只是把命令傳遞給下一個LED燈而不執行控制亮度操作。當最終被控的LED燈接收到上一個LED燈傳遞過來的命令后,地址相符,就執行命令,并檢測有無故障,最后把結果用反向傳遞中繼命令沿原路返回。下面為addr =03時的情況:(d)addr 06 22 02 00 XX,addr =03號LED燈執行了主控制器的命令后,返回正確信息給02號LED燈。
(4)addr 06 22 01 00 XX,02號LED燈接收到03號傳遞過來的反向傳遞中繼命令,又轉發給01 號LED燈。
(5)addr 06 22 00 00 XX,01號LED燈接收到02號傳遞過來的反向傳遞中繼命令,又轉發給00號即主控制器。
以上Modbus命令中第一個字節addr為最終要控制的LED燈的地址,第三個字節22為反向傳遞,第四個字節為下一個接收命令的LED燈地址。這樣主控制器就可以知道addr號LED燈執行命令的情況。
5 結束語
設計了一種基于電力載波通信的智能LED控制系統,完成了軟硬件開發,設計出了一套完整的系統模型。該系統的主要創新點在于:其一,將電力載波模塊集成到LED燈內部,不需要外接MCU微控制器,不需要改變原有的電力線和E27螺口燈泡接口,節省了費用;其二,利用光敏電阻檢測LED燈運行狀態以及LED故障檢測,主控制器可通過Modbus協議對各照明點處的多個智能LED燈進行開關控制、256級亮度控制及故障自檢操作;其三,Modbus自定義擴展協議的方法實現遠距離智能LED燈中繼控制,為電力載波在更遠距離的應用提供了新的可行參考方案。
參考文獻:
[1]汀磊,蔣曉波,陳郁陽,等.一種用于LED路燈的高效率電源驅動器設計[J].照明工程學報,2009,20(4):54-58.Jiang Lei,Jiang Xiaobo,Chen Yuyang,et al.A High Efficiency Power Supply Designed for LED Street Lights[J].China Illuminatng Engineering Journal,2009,20(4):54-58.
[2]汪義旺,宋佳,張波,等.基于低壓電力載波通信的FFU風機群控系統[J].儀表技術與傳感器,2012 (12):45-46.WANG Yi-wang,SONG Jia,ZHANG Bo,et al.FFU Motors Group Control System Based on Low Voltage Power Line Communication Technology[J].Instrument Technique and Sensor,2012(12):45-46.
[3]羅靜華.大功率LED驅動控制技術[D].西安:西安電子科技大學,2010.Luo JingHua.Study on Drive and Control Technology of High Power LED[D].Xi’an:XiDian university,2010.
[4]劉紅俠.大功率恒流型LED驅動芯片設計[D].西安:西安電子科技大學,2008.LIU HongXia.Design of high power constant current LED driver IC[D].Xi’an:XiDian unsiversity,2008.
[5]趙青青.智能照明控制系統的特點及應用綜述[J].照明工程學報,2011,22(4):112-116.ZHAO QingQing.The Characteristics And Application of Intelligent Iighting Control System[J].China Illuminating Engineering Journal,2011,22(4):112-116.
[6]張利.辦公室室內數字智能化LED照明光環境研究[D].北京:北京工業大學,2010.ZHANG Li.Research on The Indoor Digital Intelligent LED Illumination Iight Environment In Office[D].Beijing:Beijing unsiversity of technology,2010.
[7]樸相范,楊丹.基于電力線載波通信的糧情測控系統[J].糧食流通技術,2009(4):29-31.PIAO Xiang-fan,YANG Dan.The Grain M-easurement and Control System Based on the Power Line Communication[J].Grain Distribution Technology,2009(4):29-31.
[8]覃世歡,吳光敏.電力載波在智能家居內部網絡中的應用[J].微處理機,2012(2):36-37.QIN Shi-huan,WU Guang-min.Design and Research of Smart Home System[J].Microprocessors,2012(2):36-37.
[9]SiliconLaboratories.C8051F410/1/2/3[EB/OL].(2008-11)[2015-07-8].http://www.silabs.com/Support%20Documents/TechnicalDocs/C8051
Design of Intelligent LED Light Control System Based on Power Line Carrier
Zhao Jianping,Shao Jianlong,Chen Guang,Zhang Yi
(School of Information Engineering and Automation,Kunming University of Science and Technology,Kunming 650051,China)
Abstract:As the current conventional LED light control system has some disadvantages of short communication distance,higher costs and complex cooperation,etc,an intelligent LED light control system based on a power line carrier communication is designed.For the new system,the power line carrier communication is achieved based on C8051F411 microcontrollers.With the help of the Modbus protocol and the self-expanded Modbus protocol,the LED light switch,the 256-level brightness control and fault self-detection operation can be made without changing the original power lines and the E27 screw socket bulbs.In a transformer circuit,for a maximum of 247 LED lights,the system is suitable for the light brightness control and accurate control in further distance.The experimental results show that the system has the advantages of simple operation,stable performance and so on.
Key words:PLC;Intelligent LED;Fault self-detection;Controller;E27 screw;Modbus protocol
DOI:10.3969/j.issn.1002-2279.2016.02.020
中圖分類號:TP273.5
文獻標識碼:A
文章編號:1002-2279(2016)02-0077-05
作者簡介:趙建平(1991-),男,安徽省淮南市鳳臺縣人,碩士研究生在讀,主研方向:智能化信息處理系統。
收稿日期:2015-07-27
