核環境機器人現狀及關鍵技術分析
2016-06-15 09:28:25杜樹標蔣韋韋
兵器裝備工程學報 2016年5期
杜樹標,蔣韋韋,丁 泮
(1.中國兵器工業第五八研究所,四川 綿陽 621000;2.大亞灣核電運營管理有限責任公司,廣東 深圳 518120;3.海南核電有限公司,海南 昌江 572700)
?
核環境機器人現狀及關鍵技術分析
杜樹標1,蔣韋韋2,丁泮3
(1.中國兵器工業第五八研究所,四川 綿陽621000;2.大亞灣核電運營管理有限責任公司,廣東 深圳518120;3.海南核電有限公司,海南 昌江572700)
摘要:針對我國近年來研制的多款核環境機器人現場應用情況,分析當前核環境機器人發展急需突破的抗輻照設計、可靠通信等關鍵技術,總結了敏感元器件單體屏蔽、集成電路整體屏蔽等抗輻照加固方案,提出了機器人高頻通信方法、中繼通信方法以及機器人智能控制的主要改進方法。
關鍵詞:核環境機器人;輻射探測;抗輻照
核安全重于泰山,核安全是核工業發展的前提,必須加強對核設施的安全管控,尤其是核電站、核廢料處理廠的高反射性區域和系統,及時發現故障并完成故障處理。然而,故障處理環境往往是在高放射性區域,工作人員無法靠近,阻礙了故障處理進程,造成經濟損失,甚至引發連鎖故障,使得故障范圍擴大危及核安全。若直接由工作人員進入完成對設備的檢修、去污等工作,無疑會受到大劑量照射,危及人身安全。除此之外,核工業作業場所往往系統錯綜復雜,作業空間狹小,環境濕熱,不方便工作人員直接進入檢修。
隨著工業技術的不斷進步,由機器人完成高放射性環境下的工作成為可能,運用機器人開展高放射性區域的日常巡檢,完成特種工作等。日本福島核事故發生后,日本、美國先后派出Quince、Packbot、Warrior等多款機器人進入高放射性廠區執行現場檢測以及相應操作任務,取得了不錯的效果[1]。
作為核能發展大國,我國也越發重視核環境機器人的研發,投入大量資金及科研力量開展研究。本文結合我國核環境機器人現場應用情況,對現階段我國核環境機器人發展進行總結,分析當前核環境機器人的關鍵技術,并提出相應解決方法。
1核環境機器人基本組成
現階段研發的核環境機器人除特種作業機器人外,多為履帶式、輪式、多足式遙控機器人,由機器人系統及遠程終端組成,機器人系統以嵌入式控制系統為控制核心,配套圖像采集系統、導航系統、運動控制系統和放射性檢測等功能性系統,在現場執行檢測和操作等任務,遠程終端可實時接收機器人系統傳回的現場圖像、檢測數據等信息,根據需要控制機器人運動路線和機械手臂執行相應任務,現場應用如圖1所示。
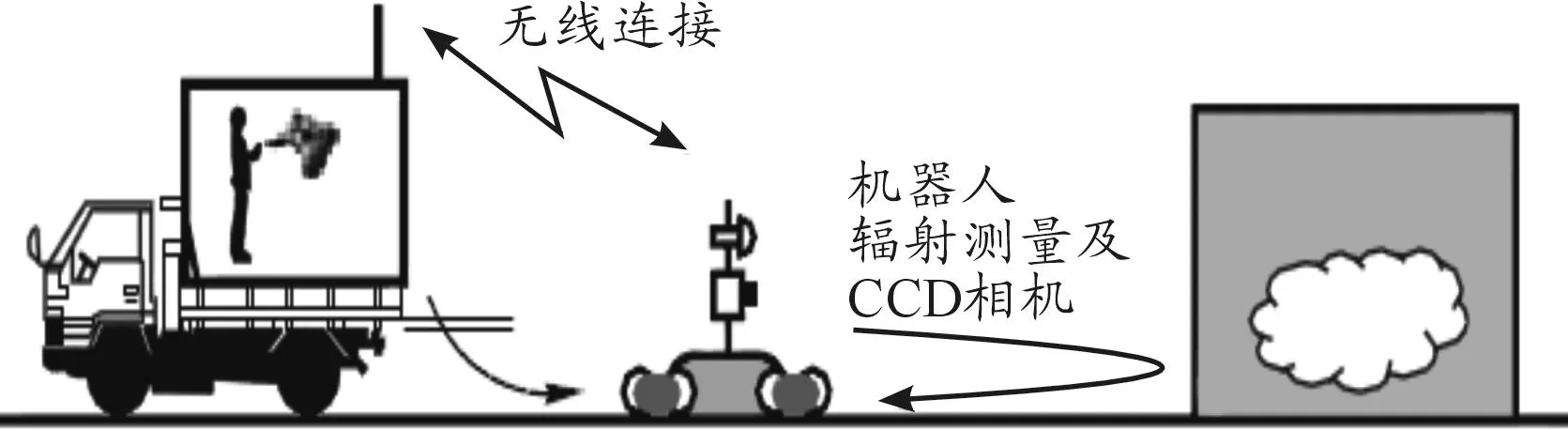
圖1 遙控機器人現場應用示意圖
機器人基本組成如圖2所示,圖像采集系統是機器人的“眼睛”,一般采用抗輻照CCD相機拍攝現場圖像,勘察現場情況并為操作者提供位置信息;導航系統通過超聲波、雷達、紅外等多種方式判斷周圍障礙物情況,提高機器人自身環境感知能力;運動控制系統主要受遠程終端控制,通過其調整機器人姿態、行走路徑以及控制機械手完成相應操作,同時運動控制系統也可根據導航系統的傳感器信息調整行走路徑,實現自動蔽障;機器人平臺搭載輻射檢測設備獲取現場輻射信息,并將測量數據通過無線傳輸模塊傳送至遠程終端。

圖2 核環境機器人基本組成框圖
2核環境機器人現狀
鑒于核環境機器人在福島核事故中發揮的重要作用,我國也加快了核環境機器人的研發。多個核工業企業、高校、科研院所牽頭研發項目,中國廣核集團、東南大學、北京理工大學、中國原子能科學研究院等單位成功研制了幾款核環境專用機器人工程樣機,部分機器人已在核電站進行了工程示范應用。目前我國研發的核環境機器人按用途大致分為特種作業機器人和輻射探測應急機器人[2]。本文主要以研制種類更多樣的輻射探測應急機器人為重點進行論述。
2.1核環境特種作業機器人
針對核電站在役檢查、核燃料更換等工作,科技部“核反應堆專用機器人技術與應用”課題研發了反應堆換料機器人、反應堆壓力容器無損檢測機器人、蒸汽發生器一次側堵板操作機器人、反應堆整體螺栓拉伸機、核電站多功能水下爬行機器人、核電站微小型作業潛艇六款核環境特種作業機器人[3-4],部分已進行了現場應用。
1)反應堆整體螺栓拉伸機自動測量機器人[5]。該機器人系統用于實現核電站內壓力容器多個螺栓在液壓拉伸過程中的拉伸量以及殘余拉伸量的自動測量,從而減少操作人員在輻射環境下的滯留時間,有效的降低其所吸收的輻射劑量,并提高系統整體的工作效率[5]。該機器人已在大亞灣核電站進行示范應用,取得良好效果。
2)蒸汽發生器一次側堵板操作機器人。蒸汽發生器一次側堵板操作機器人針對蒸汽發生器檢修期間的操作實現遠程控制,有效減少現場操作人員所吸收的輻射劑量。機器人系統通過視覺識別可在傾角為45°的蒸汽發生器入水孔端面上正常工作。可實現360°旋轉,完成堵板安裝的高可靠性自主作業[6]。解決了大扭矩螺栓擰緊、高精度視覺識別、擰緊規劃與自主作業以及輕量化結構設計等關鍵技術,實現了蒸汽發生器一次側堵板自動安裝功能[5],保障了核電站放射性第二道屏障的完整性。
2.2輻射探測應急機器人
1)核輻射檢測與應急機器人。中國原子能科學研究院與北京航空航天大學共同研發了核輻射檢測與應急機器人[7],如圖3所示,其主要技術指標如表1所示。該機器人采用履帶式運動機構,機器人平臺攜帶放射源“熱點”成像裝置,放射源“熱點”成像裝置可以清晰給出現場放射性污染程度的圖像,相機可實現360°周向觀測,-10°至+10°俯仰觀測[5]。機器人控制系統采取穩定可靠的嵌入式設計,且具備冗余控制功能,采用有線+無線的通訊方式,可通過專用控制臺和計算機分別控制。
2)SJTU特種機器人。上海交通大學特種機器人研究室研制的核工業機器人特別針對核電站、核燃料后處理廠及廢水、廢氣、廢渣處理廠等放射性環境現場,能夠對核設施中的設備裝置進行探測、維修等。如圖4所示,其主要技術指標如表2所示。該機器人采用履帶式車載機械臂基本結構,能夠以半徑為70 cm進行原地旋轉,使用多攝像機、超聲測距傳感器等在內的傳感器集成系統,具有雙向力反饋能力以提供操作員環境力感信息[5]。
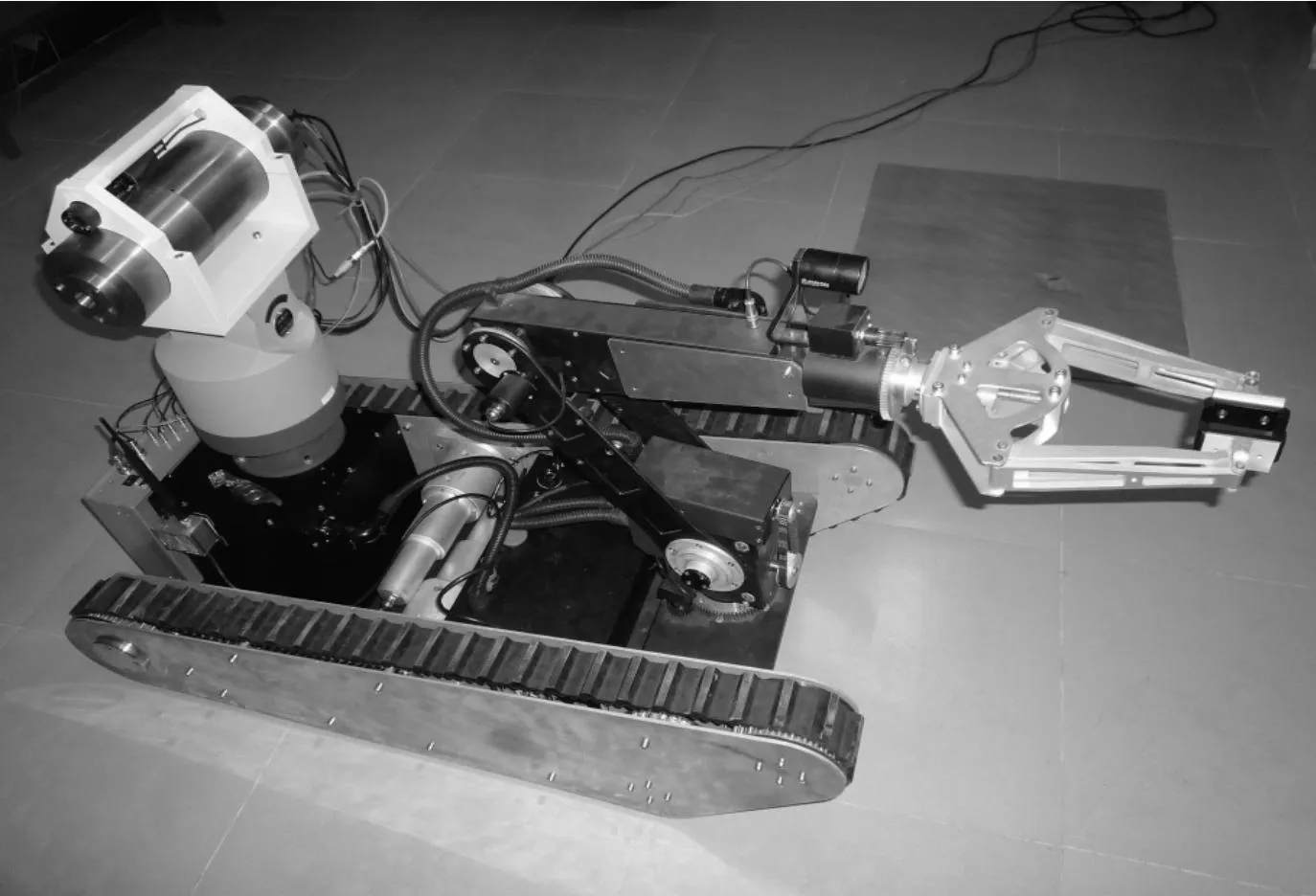
圖3 核輻射檢測與應急機器人

圖4 SJTU特種機器人
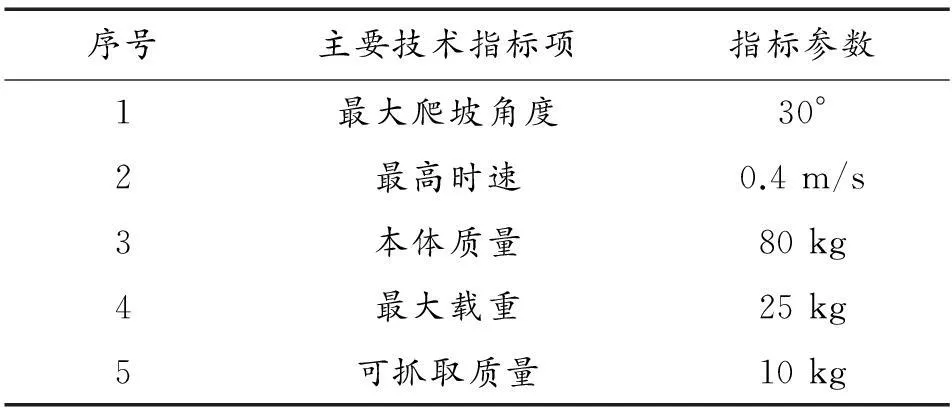
序號主要技術指標項指標參數1最大爬坡角度30°2最高時速0.4m/s3本體質量80kg4最大載重25kg5可抓取質量10kg
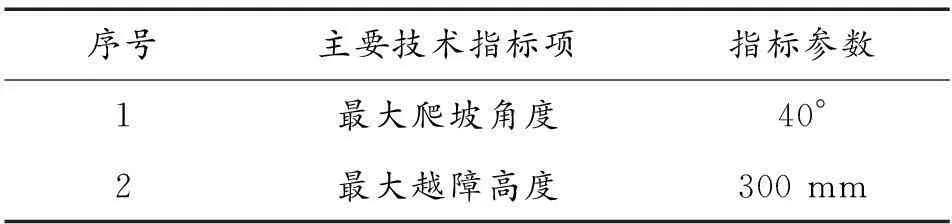
表2 SJTU特種機器人主要技術指標
3)水下異物打撈機器人。中國科學院光電技術研究所研發的水下異物打撈機器人克服了高輻照環境下動靜密封等關鍵技術,成為首臺國內自主研發的水下異物打撈機器人。如圖5所示,其主要技術指標如表3所示。機器人由水下爬行機、二維云臺、機械手、清掃機、水下吸泵和控制器等組成,監控部分由電視攝像系統、圖像壓縮存儲系統組成。其中機械手用于處理體型較大的墜落物,例如螺絲刀等;清掃機可以清理體積較小的物品,例如螺絲等;水下吸泵用于微小物體清掃,例如:粉渣等。該機器人系統設計為多學科交叉融合,集光學、自動控制、精密機械、信息處理技術和系統集成于一體[5,8]。
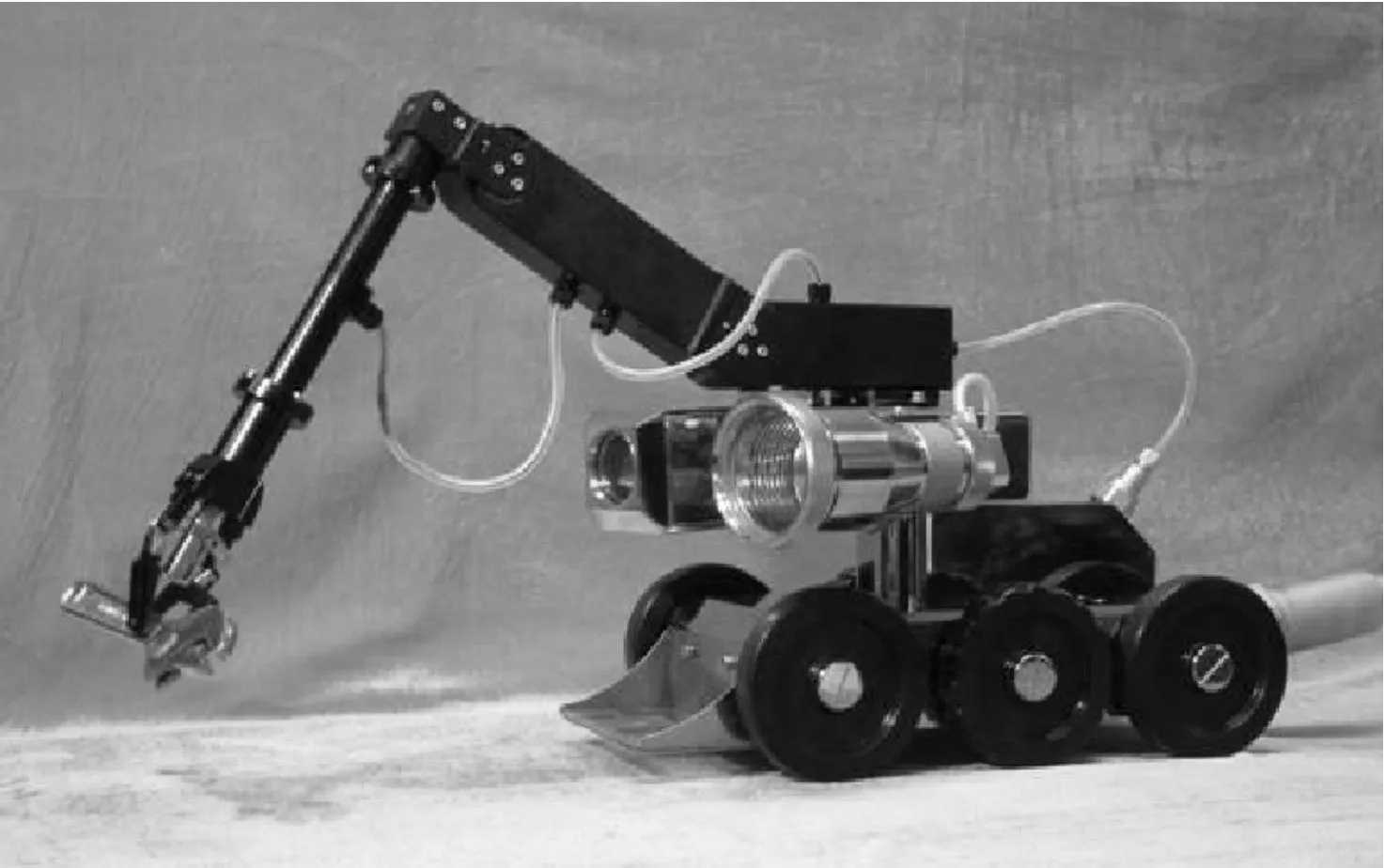
圖5 水下異物打撈機器人
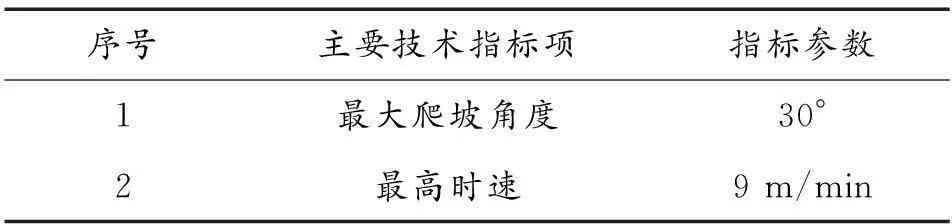
序號主要技術指標項指標參數1最大爬坡角度30°2最高時速9m/min
4)中輻院輻射探測機器人。中國輻射防護研究院研制了一種能夠在環境γ劑量率不高于100 Gy/h的強輻射場中進行探查作業的六輪式遙控探測機器人。如圖6所示,其主要技術指標如表4所示。該機器人由行走機構、電動云臺以及探測設備3部分組成,其中兩只前輪可垂直擺動90°,提高遙控探測機器人翻越障礙的能力。

圖6 中輻院輻射探測機器人
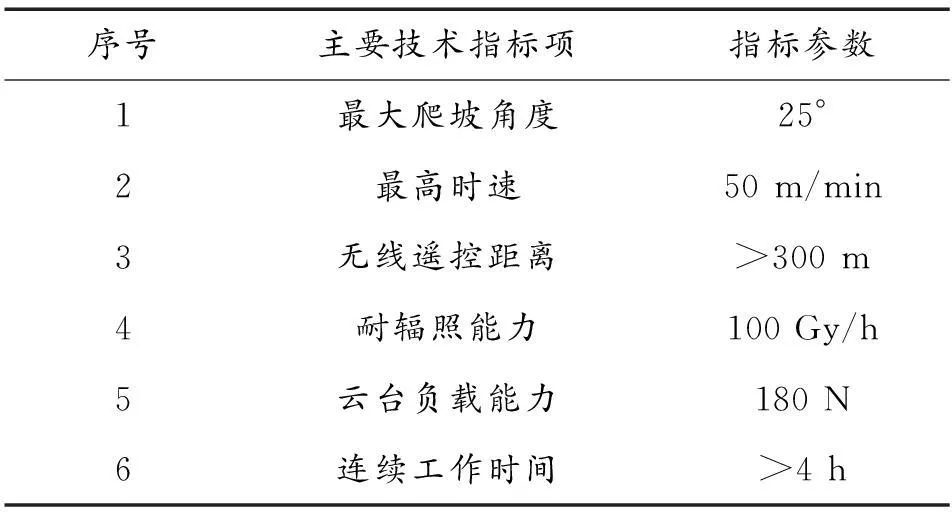
序號主要技術指標項指標參數1最大爬坡角度25°2最高時速50m/min3無線遙控距離>300m4耐輻照能力100Gy/h5云臺負載能力180N6連續工作時間>4h
該機器人采取了有線、無線兩種通訊方式進行遠程控制,能夠實時反饋強輻射環境現場的場景圖像和輻射信息。探測設備由耐輻射攝像機和高壓電離室組成,高壓電離室的可測最大劑量率為100 Gy/h,工作時把耐輻射攝像機安裝在遙控探測機器人的電動云臺頭關節頂端,通過控制電動云臺3個關節的轉動實現攝像機對場景的多方位拍攝,遙控探測引導機器人現場作業,配合高壓電離室使用可方便直接尋找放射性熱點,了解事故現場情況[9]。
5)東南大學核化探測機器人。東南大學聯合多單位研發的核化探測機器人如圖7所示,其主要技術指標如表5所示。該機器人配備攝像頭、超聲波和紅外測距傳感器、無線通信系統、核輻射探測儀等,具有體積小、重量輕、機動能力強等特點[10],可深入高毒高危作業區域,執行核輻射、化學、生物污染的探查和取樣,執行緊急任務[11]。

圖7 東南大學核化探測機器人
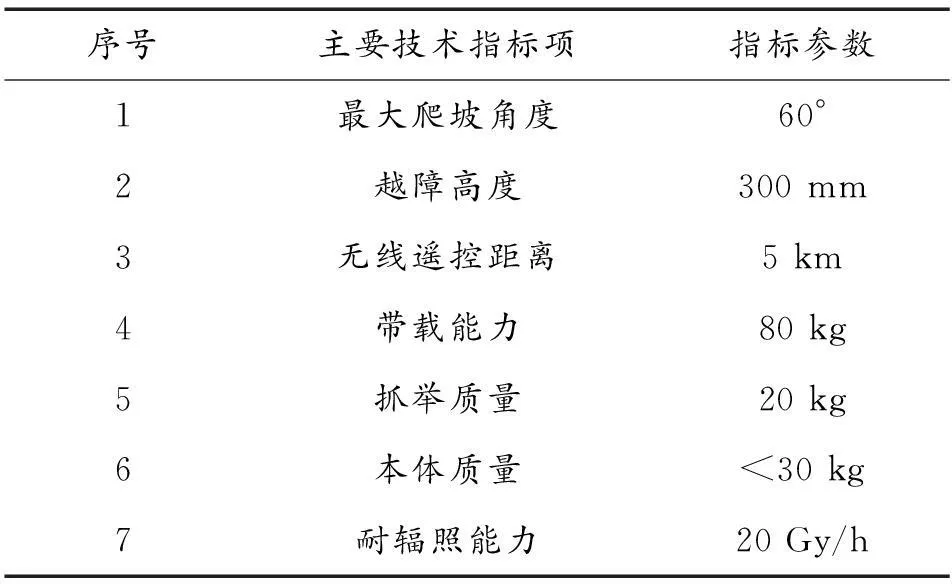
序號主要技術指標項指標參數1最大爬坡角度60°2越障高度300mm3無線遙控距離5km4帶載能力80kg5抓舉質量20kg6本體質量<30kg7耐輻照能力20Gy/h
3關鍵技術分析
通過近年的著力研發,我國核環境機器人已取得一定成果,但在試驗和應用過程中也暴露了一些問題,部分關鍵技術仍急需解決。
3.1核環境機器人抗輻照技術
核環境機器人耐輻照能力至關重要,在福島核事故救援過程中,日本Quince 1號機器人就因輻射劑量過大“照死”在反應堆廠房無法收回[12]。核環境機器人耐輻照能力主要取決于其部件材料耐輻照性能,尤其是對輻射最為敏感和脆弱的控制電路、電子器件等,一般電子部件在累積計量達到10Sv時性能開始下降。比較昂貴的解決方式是采用CMOS集成電路技術(SOS技術)和在合成藍寶石絕緣襯底上、在絕緣襯底上形成單晶硅制作數字電路和模擬電路技術(SOI技術)[9]。對于中小規模的集成芯片,也可通過輻照環境篩選器件以及抗輻射材料屏蔽等方式減小環境輻射影響,但需要盡可能減小屏蔽結構給機器人帶來的“死重”,減小對機器人靈活性的影響。
以核環境機器人通常配備的CCD相機為例,其主要由CCD傳感器、FPGA集成電路等電子器件構成,在輻射環境中CCD傳感器及集成電路都會產生缺陷,造成工作異常或故障[13],普通CCD相機輻照劑量超過200 Gy時無法工作[14],如圖8。
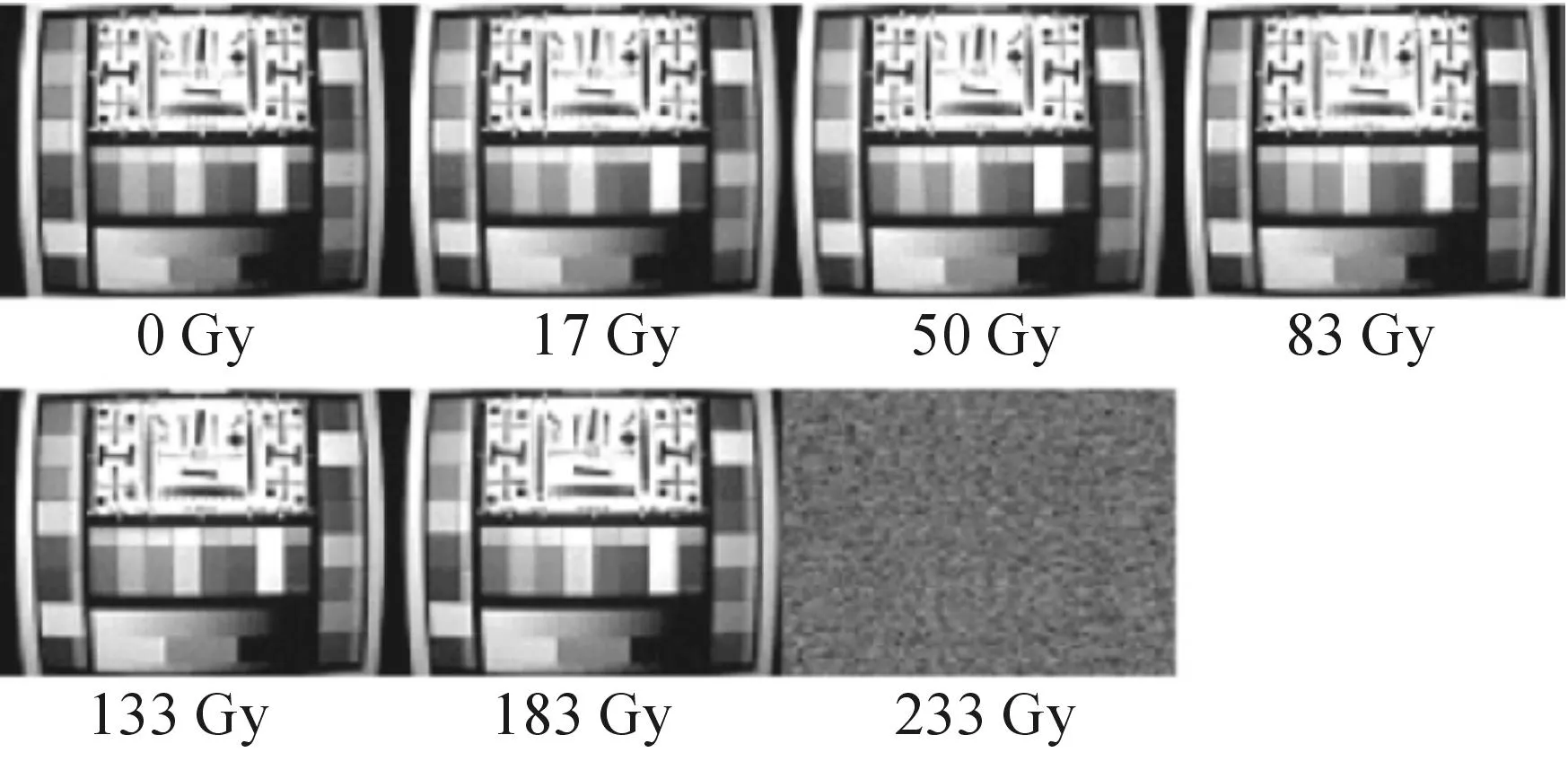
圖8 CCD傳感器輻照試驗結果
敏感部件高度集成化、模塊化設計;電子元器件進行輻照試驗篩選;鎢、鉛等耐輻照材料加固屏蔽電子元件;電路整體屏蔽加固,如圖9所示。
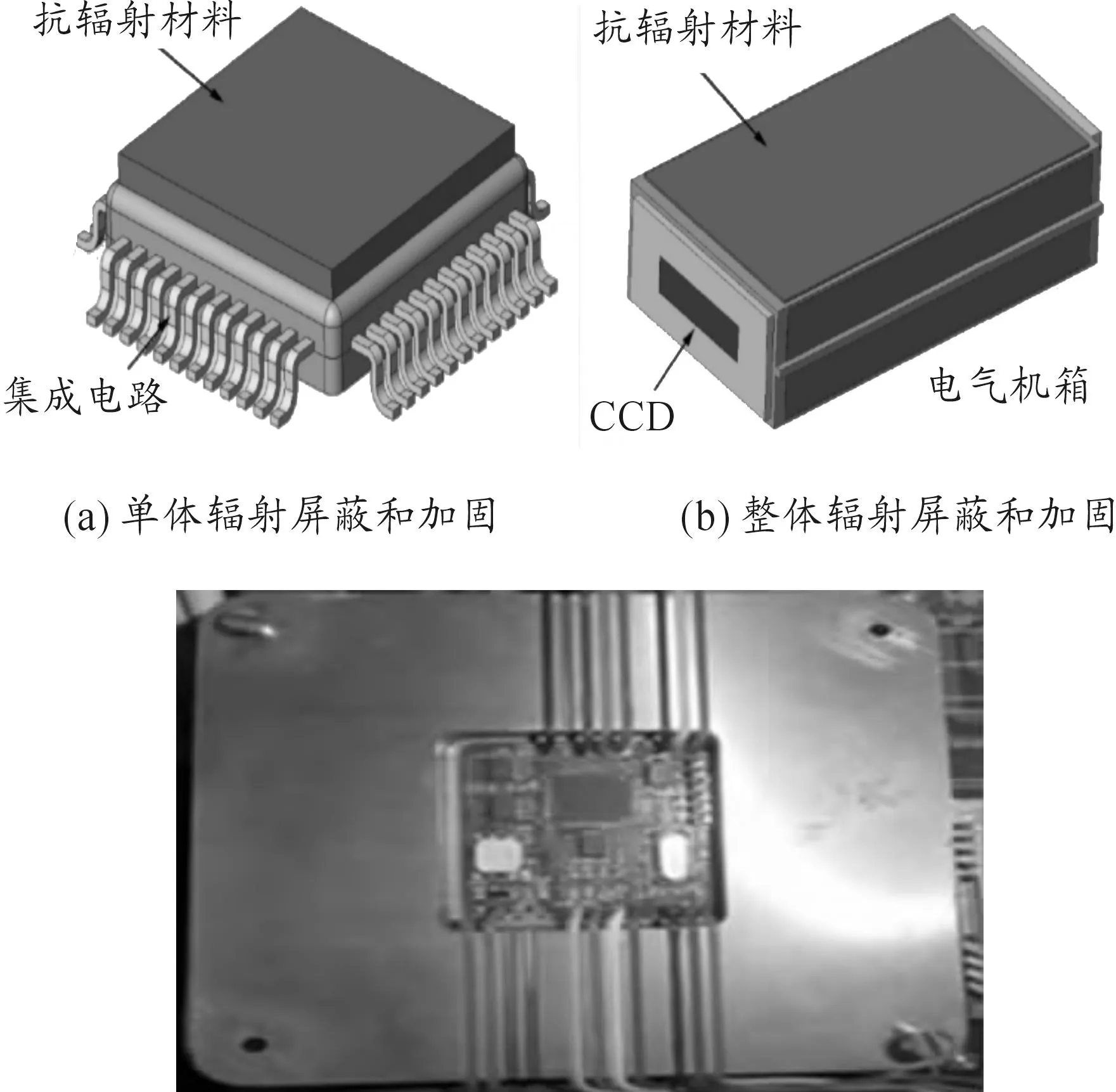
圖9 屏蔽加固方案
試驗表明:通過抗輻射加固的半導體器件耐輻照能力可達10 kSv[13]。目前核環境機器人研發過程中,各研發單位抗輻照設計方案優劣各異,缺少抗輻照模塊化、標準化接口設計和即插即用的軟硬件模塊輻射加固設計[1],必須減少研發成本,縮短研發時間。
3.2核環境機器人可靠通信技術
除抗輻照的特殊要求外,機器人系統與遠程控制終端的可靠通訊也是當前核環境機器人發展面臨的關鍵問題。
現場信息采集是核環境機器人的重要功能,現場信息的有效傳回對應急救援決策至關重要。由于機器人作業的放射性控制區墻體為厚度1.5~2 m的混凝土,對無線通信信號有極強的屏蔽,機器人系統無法與遠程終端建立可靠的無線通信[15]。若采用有線通信,控制區復雜的現場環境極易引起通信線纜纏繞,影響機器人行進和工作。針對這一問題,主要采用三方面措施:通信線纜防纏繞設計;發展高頻無線通信;機器人系統與遠程終端間增加通信中繼[16]。
在福島事故救援中表現突出的美國Packbot機器人采用有線+無線的混合通信方式,無線通信距離800 m,同時機器人配備200 m通信線纜,在無線通信不可用情況下,使用有線通信。其通信單元設計的線纜卷軸器是防止線纜纏繞的關鍵,卷軸器控制系統能夠根據機器人的行徑自動支出和重繞線纜,盡可能減小線纜纏繞,并防止線纜過度拉緊造成通信故障[17],如圖10所示。另外,packbot可根據應用需要,配備2.4 GHz或4.9 GHz頻段全向天線[18],增強信號的穿透能力。我國核環境機器人無線通訊通常是2.4 GHz及以下頻段,需要開展更高頻段通信研究,以滿足特殊應用環境。

圖10 Packbot機器人通信單元
同樣參與福島核事故救援的日本Quince 2號機器人采用光纖連接器和中繼器的模式,可實現2 km通信距離,同時提高了通信可靠性[19],如圖11所示。

圖11 機器人中繼通信示意圖
3.3核環境機器人智能控制技術
結合應用需要,核環境機器人逐漸從單一機器人、單一功能、簡單控制向多機器人協同、復合功能、智能控制方向發展。機器人導航系統配備超聲波、雷達、紅外、陀螺儀等多種傳感器增強機器人的環境感知能力,通過傳感器信息融合、圖像信息處理,判斷現場環境進而實現自主控制[20-21]。同時,機器人平臺搭載的CCD相機、輻射探測器、氣體探測器、爆炸物探測器及機械手臂等,操作者結合傳感器綜合信息及任務需求控制機器人運動和機械手操作。機器人的自主控制與遠程終端控制高效結合,同時多機器人協同配合實現智能控制也是當前核環境機器人發展的關鍵技術。智能控制主要有以下方法:
1)優化機器人基于多傳感器數據的導航算法,實現合理的實時路徑規劃[22-23],增強多參數之間的自適應協同控制;
2)多機器人數據信息共享,提高遠程終端協同控制能力;
針對機器人的智能控制,目前有傳統PID控制、神經網絡控制、模糊控制、自適應魯棒控制、灰色理論控制等多種算法,復合算法研究也在開展,均有不同程度應用。快速、可靠的控制算法是提高機器人智能控制程度的關鍵。
多機器人數據共享,充分利用多機器人、多傳感器數據信息,建立空間信息與時間信息互補關系,模擬出更貼近實際的現場環境[24-25],提高控制精度和效率,實現核環境機器人在復雜環境中的智能控制。
4結論
本文總結了我國近年研制的多款核環境機器人技術性能及實際應用情況,分析當前核環境機器人仍需解決的關鍵技術,包括核環境機器人抗輻照技術、可靠通信技術、智能控制技術等,提出了相應技術方法。
參考文獻:
[1]QIAN H H,XU Y S,XU W F.The State-of-arts and Key Technologies for Telerobotics in Nuclear Applications[C]//Proceedings of the 32nd Conference,2013:6016-6017.
[2]廖韓林,趙毅,李清鵬.核化高危環境偵察機器人[C]//2013中國指揮控制大會論文集,2013:558.
[3]儀器.我國核反應堆專用機器人研發取得技術進展[J].軍民兩用技術與產品,2014(12):29.
[4]師帥.我國成功研發六款核反應堆專用機器人[J].電苑雜談,2015,23(9):50.
[5]楊陽.整體螺栓拉伸機自動測量機器人系統設計與實現[D].北京:北京理工大學,2015(1):4-6.
[6]DUAN X G,YANG Y.Control System for Blocking Plate Manipulation Robot Based on Visual Servo[C]//13th International Conference on ICIA.IEEE,2013:326-333.
[7]李懷兵,張韜懿,丑武勝.核輻射探測與應急處理機器人的小型機械臂系統設計[J].高技術通訊,2011,21(1):101-105.
[8]竇普,廖禮斌,張志剛.基于μC/OS-Ⅱ水下異物打撈機器人控制系統的設計[J].計算機測量與控制,2014(7):31.
[9]沈亞華,朱萬寧,董強敏.耐強輻射遙控探測機器人研制[J].核電子學與探測技術,2015,35(1):75.
[10]崔建偉.東南大學研制成功小型核化探測與應急處理遙操作機器人[J].機器人技術與應用,2012(1):45.
[11]凌軍輝.中國防核化機器人[J].國事,2012:32.
[12]劉波,王欣.機器人在核與輻射事故應急中的應用展望[J].工業安全與環保,2015,41(1):63-64.
[13]郭永飛.遙感CCD相機的抗輻射策略研究[J].中國光學與應用光學,2010,3(6):538-539.
[14]劉呈則,嚴智,鄧景珊.核電站應急機器人發展和技術研究[J].核科學與工程,2013,33(1):98,102.
[15]徐文福,毛志剛.核電站機器人研究現狀與發展趨勢[J].機器人,2011,33(6):763-764.
[16]孫奇.無線協同中繼通信系統的傳輸技術研究[D].北京:北京郵電大學,2014:3-4.
[17]iRobot Corporation.irobot 510 Packbot CBRNe products introduction[EB/OL].[2015].http://www.irobot.com.
[18]iRobot Corporation.irobot Packbot Accessories One Robot Unlimited Possibilities[EB/OL].[2015].http://www.irobot.com.
[19]劉振景.輻射場數據采集及無線傳輸處理[D].哈爾濱:哈爾濱工程大學,2009:15.
[20]張明路,彭平,張小俊.特殊環境下服役機器人發展現狀及其關鍵技術研究[J].河北工業大學學報,2013,42(1):73-74.
[21]宋偉科.基于多機器人的開放式智能控制系統關鍵技術研究與開發[D].天津:天津大學,2012:10-11.
[22]衛光,倪靖濱,白玉磊.淺談核工業機器人及其自控與遙控切換技術[J].科技導向,2015(2):83.
[23]丑武勝,劉源,楊光.核輻射探測機器人故障容錯控制方法研究[J].博士論壇,2010,10(2):1-2.
[24]王俊,徐宏慶,王高山.多模式無線傳感器機器人的研究與設計[J].電子技術應用,2014,40(10):84-85.
[25]郭崇濱.并聯機器人多目標協同智能控制研究[D].上海:東華大學,2013:14-15.
(責任編輯楊繼森)
本文引用格式:杜樹標,蔣韋韋,丁泮.核環境機器人現狀及關鍵技術分析[J].兵器裝備工程學報,2016(5):93-97.
Citation format:DU Shu-biao,JIANG Wei-wei,DING Pan.Status and Key Technologies Analysis for Robot in Nuclear Applications[J].Journal of Ordnance Equipment Engineering,2016(5):93-97.
Status and Key Technologies Analysis for Robot in Nuclear Applications
DU Shu-biao1,JIANG Wei-wei2,DING Pan3
(1.No.58 Research Institute of China Ordnance Industries,Mianyang 621000,China;2.Daya Bay Nuclear Power Operations and Management Co.,Ltd.,Shenzhen 518120,China;3.Hainan Nuclear Power Co.,Ltd.,Changjiang 572700,China)
Abstract:Based on the practical performance of nuclear application robots developed in China in recent years,the key technologies of the current robots such as radiation resistance and reliable communication were studied.This paper summarized the sensitive components and integrated circuit radiation resistance scheme and put forward the communication and intelligent control measures.
Key words:nuclear application robot; radiation detection; radiation resistance
doi:【信息科學與控制工程】10.11809/scbgxb2016.05.023
收稿日期:2015-11-12;修回日期:2015-12-20
作者簡介:杜樹標(1987—),男,碩士,主要從事核輻射監測技術研究。
中圖分類號:TP24
文獻標識碼:A
文章編號:2096-2304(2016)05-0093-06
