基于領導者的群體機器人編隊及導航控制
2016-06-14 02:30:52高全杰
武漢科技大學學報 2016年3期
關鍵詞:一致性
陳 浩,雷 斌,高全杰
(武漢科技大學機械自動化學院,湖北 武漢,430081)
?
基于領導者的群體機器人編隊及導航控制
陳浩,雷斌,高全杰
(武漢科技大學機械自動化學院,湖北 武漢,430081)
摘要:介紹了基于領導者的群體機器人一致性方法,在此基礎上提出一種群體機器人編隊及導航控制方法。該方法采用分層控制策略,即控制系統分為目標層、領導層和跟隨層。將目標層中目標點的位置信息發送給領導者,采用位置一致性算法使領導者朝目標運動;與此同時,領導者將其狀態信息發送給跟隨層中的跟隨者,采用基于領導者的群體機器人編隊控制方法,使跟隨者與領導者保持一定的隊形朝著目標運動。該方法可針對由多個子集構成的群體機器人系統進行導航。通過計算機仿真和群體機器人實驗平臺驗證了所提方法的有效性。
關鍵詞:群體機器人;多智能體;一致性;領導者;編隊;導航;分層控制
隨著機器人在工業、農業、醫學、建筑業甚至軍事等領域中的應用日益廣泛,其工作環境和任務也越來越復雜。單個機器人對外部環境信息的獲取及處理能力是有限的,因此其發展存在著一定的瓶頸;群體機器人結構簡單,設計和制造成本相對較低,而且群體機器人的可擴展性、靈活性、柔性和魯棒性等都占有較大的優勢,因此其應用前景更加廣闊。群體機器人控制的一個基本方法是一致性方法,它是個體之間相互作用的規則,描述了每個個體與它相鄰個體間的信息交互過程,通過局部的信息交互而使整個群體的狀態信息量形成一致。該方法在群體機器人、多智能體系統等研究領域已經取得了一定的成果[1-5]。
一致性方法的一個重要應用是群體機器人的編隊控制。編隊是指控制群體機器人的方向角、速度以及機器人之間的相對距離形成一致,保持設定的隊形朝著同一個方向運動。文獻[6]介紹了一種基于一致性的多智能體編隊控制方法,通過選擇合適的一致性狀態信息量,將一致性變體算法運用到編隊控制中。文獻[7]采用迭代學習控制方法產生一系列的控制信號,用于多智能體的編隊控制。文獻[8]提出了一種輸入受限的編隊控制方法,具有較好的實際應用效果。群體機器人編隊控制可使群體機器人保持一定的隊形進行運動,然而這種運動不具有目的性,要想其運動到指定位置并執行任務,則需進行編隊導航控制。文獻[9]研究了基于PSO參數優化的群體機器人在位置環境下的編隊導航控制。文獻[10]研究了傳感器約束條件下基于領導者信息的編隊導航,提出一種局部控制策略,即采用動態信息交互拓撲結構,也能確保形成預定的編隊模式。文獻[11]針對多智能體系統提出了模糊邏輯控制的導航控制方法。
本文首先介紹一種基于領導者的一致性方法,然后提出基于領導者的群體機器人編隊控制方法以及采用分層控制策略的編隊導航控制方法,最后通過仿真和試驗對上述方法的有效性進行驗證。
1基于領導者的一致性方法
1.1預備知識
1.2數學描述
這里考慮由n+1個機器人組成的群體機器人系統,其中編號為0的機器人為領導者,其他編號1~n的機器人為跟隨者。該n+1個機器人的信息交互圖={V,E}中,V={0,1,2,…,n},信息交互矩陣為:
跟隨者機器人的數學模型為:
(1)
式中:t為時間;ξi∈R和ζi∈R分別表示第i個跟隨者機器人的狀態信息量和控制輸入量。
領導者機器人的數學模型為:
(2)
式中:ξ0∈R和ζ0∈R分別表示領導者機器人的狀態信息量和控制輸入量。
定義1對于任意初始條件,如果滿足
即所有跟隨者的狀態信息量最終收斂于領導者的狀態信息量,則表明群體機器人系統形成具有領導者的一致性。
建立基于領導者的一致性方法如下:
(3)
式中:bi=ai0≥0;wij(t)和wi0(t)為t時刻的加權值。
定理1[12]基本靜態連續時間一致性方法(式(3))漸進形成一致,當且僅當其對應的交互圖有一條有向生成樹。
2基于領導者的編隊控制方法
2.1機器人運動模型
一個典型的移動機器人運動模型如下:
(4)
式中:xi、yi分別為機器人i的橫坐標和縱坐標;θi、vi、ωi分別為機器人i的方向角、線速度和角速度,其中vi和ωi為控制輸入量。
2.2基于領導者的對齊行為一致性方法
對齊行為是用來控制群體機器人的方向角形成一致,使群體機器人朝著同一個方向運動。根據式(3),基于領導者的對齊行為一致性方法可以表示為:
(5)
2.3基于領導者的聚集和分散行為一致性方法
聚集和分散行為是用來控制群體機器人的相對距離形成一致,使群體機器人保持一定的隊形。 基于領導者的聚集和分散行為一致性方法可以表示為:
(6)
(7)
令ri=[xi,yi]T、rj=[xj,yj]T、rij=ri-rj,則式(6)和式(7)可以化為:
(8)

綜合式(5)和式(8),就得到基于領導者的群體機器人編隊控制方法。
3基于領導者的編隊導航控制方法
3.1編隊導航分層控制策略
在基于領導者的編隊控制方法基礎上,本文提出一種群體機器人分層編隊導航控制方法。將控制系統分為目標層、領導層和跟隨層,如圖1所示,其中:目標層含有一個目標點,領導層含有一個或多個領導者,跟隨層含有一個或多個不相連通的跟隨者群,每一個領導者都有與其對應的跟隨者群。具體的控制策略為:將目標層的目標信息發送給領導層的領導者,并采用位置一致性方法,使領導者朝著目標點運動;同時,每一個領導者將自身狀態信息發送給跟隨層中與其相對應的跟隨者群,并采用本文提出的編隊控制方法與跟隨者保持一定的隊形朝著目標運動,不同的群體之間不受影響。
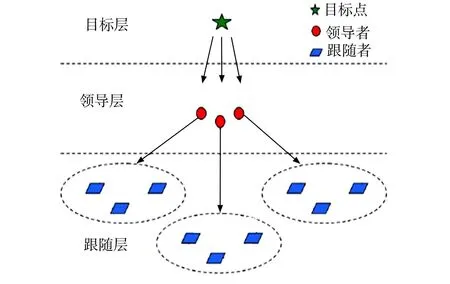
圖1 分層控制策略示意圖
3.2編隊導航控制方法
由領導層和跟隨層中的N個機器人組成的群體機器人系統記為g={r1,r2,…,rN},存在m個不連通的子集,每個子集中含有一個領導者和n個跟隨者。某一個子集中的群體機器人記為gk={rk0,rk1,…,rkn},1≤k≤m,其中領導者為rk0。采用位置一致性算法,將目標信息發送給領導者rk0,其導航控制方法如下:
(9)
引理1[12]當群體機器人的信息交互圖為一條有向生成樹時,所有機器人最終收斂于根節點機器人的狀態信息。
領導者和目標點可看作是由兩個機器人所組成的有向生成樹[12],且目標點為根節點。將目標點的位置信息發送給領導者,并采用式(9)的控制方法,由引理1可知,領導者的狀態信息量最終收斂于目標點的狀態信息量,即領導者運動到目標點位置。向目標點運動的同時,領導者與其對應的跟隨者之間采用式(5)和式(8)所示的基于領導者的編隊控制方法進行編隊運動,到達目標點及其附近,從而完成編隊導航運動。同理,其他子集的領導者及所對應的跟隨者也采用上述控制方法,從而完成整個群體的編隊導航控制。
4編隊導航控制仿真與試驗
4.1仿真
本仿真采用的群體機器人系統分為兩個子集:g1={r10,r11,r12,r13,r14}和g2={r20,r21,r22,r23,r24},其中r10和r20為領導者。每個子集中含有1個領導者和4個跟隨者,其信息交互如圖2所示,圖中箭頭表示信息傳遞方向。
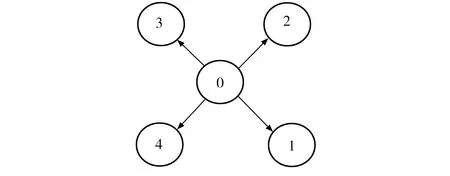
圖2 仿真過程中機器人的信息交互
Fig.2 Information interaction between robots in the simulation
圖2中含有一條有向生成樹,由引理1可知其狀態信息量可以形成一致。兩個群體機器人子集的信息交互矩陣為:
設定g1中5個機器人的初始位置分別為(12,5)、(20,10)、(6,13)、(20,3)、(4,3),編隊運動時,跟隨者與領導者在x軸和y軸方向的距離保持為5 m,跟隨者之間的距離保持為10 m。設定g2中5個機器人的初始位置分別為(12,66)、(18,70)、(6,73)、(21,64)、(5,52),編隊運動時,跟隨者與領導者在x軸和y軸方向的距離保持為8 m,跟隨者之間的距離保持為16 m。圖3為群體機器人的初始狀態。采用本文所提出的編隊導航控制方法,仿真結果如圖4所示。從圖4中可以看出,領導者最終都運動到目標點,并與跟隨者保持一定的隊形,從而驗證了該編隊導航控制方法的有效性。
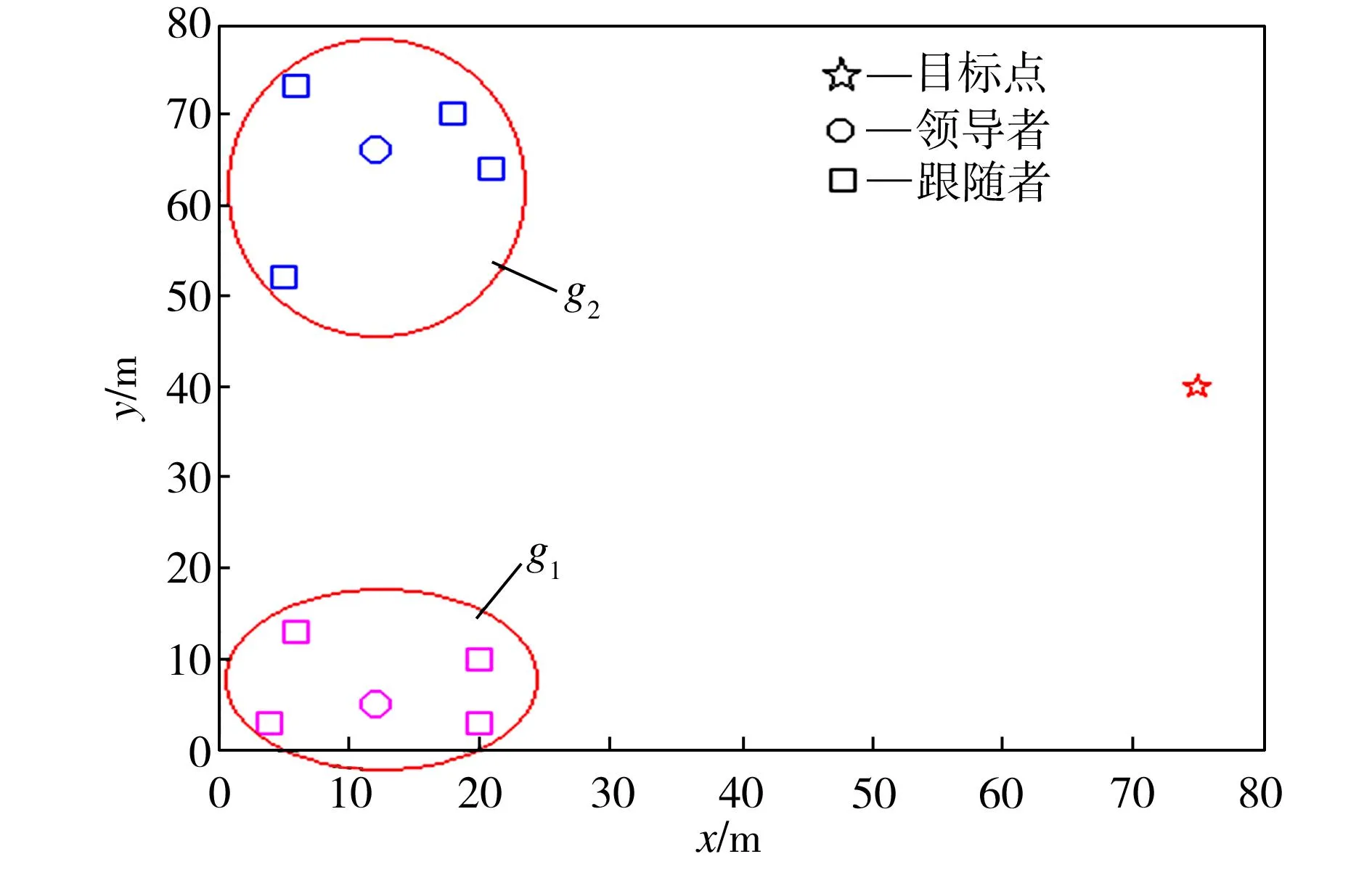
圖3 群體機器人的初始狀態
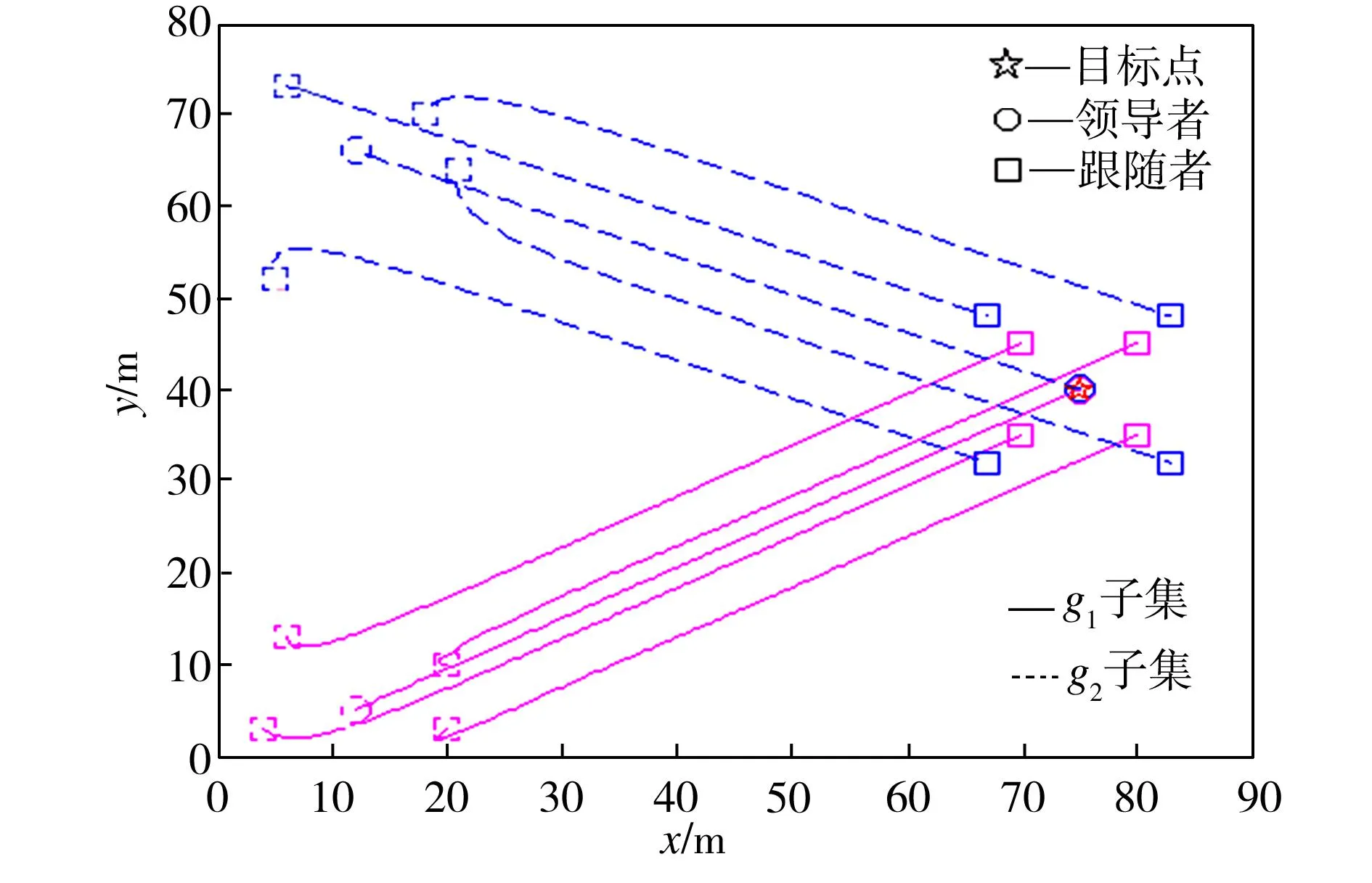
圖4 群體機器人編隊導航控制仿真結果
Fig.4 Simulation result of formation and navigation control for swarm robots
4.2試驗
采用本文提出的編隊及導航控制方法在由3個機器人組成的群體機器人實驗平臺上進行試驗。該群體機器人有一個領導者和兩個跟隨者,表示為g={r0,r1,r2},其信息交互如圖5所示,設定r0與r1及r2的編隊距離均為0.2 m。編隊及導航控制試驗結果如圖6所示。從圖6中可以看出,機器人最后保持一定的編隊運動到了指定目標處,進一步驗證了本文所提出的群體機器人編隊及導航控制方法的有效性。
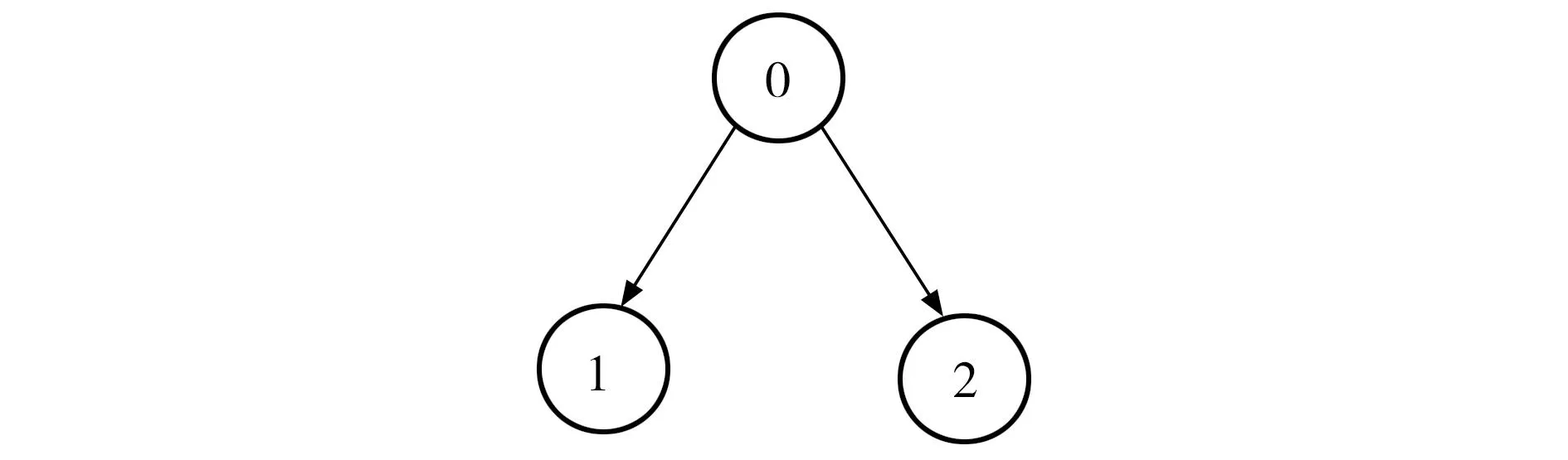
圖5 試驗過程中機器人的信息交互
Fig.5 Information interaction between robots in the experiment
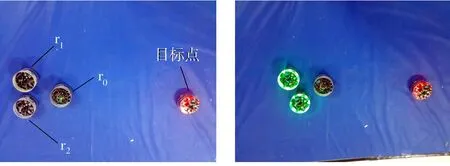
(a)初始狀態(b)t=3 s
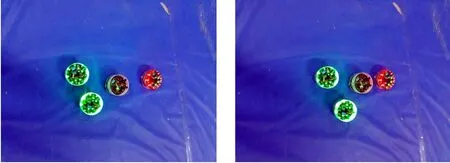
(c)t=7 s(d)t=9 s
圖6群體機器人編隊導航控制試驗結果
Fig.6 Experimental results of formation and navigation control for swarm robots
5結語
本文提出了基于領導者的群體機器人編隊控制方法以及基于領導者的群體機器人編隊導航控制方法,該方法采用分層控制策略,即將控制系統分為目標層、領導層和跟隨層,可針對由多個子集構成的群體機器人系統進行導航。最后通過計算機仿真和群體機器人實驗平臺驗證了該方法的有效性。
參考文獻
[1]Olfati-Saber R,Murray R M. Consensus problems in networks of agents with switching topology and time-delays[J]. IEEE Transactions on Automatic Control, 2004, 49(9): 1520-1533.
[2]Ren Wei, Beard R W. Consensus seeking in multi-agent systems under dynamically changing interaction topologies[J]. IEEE Transactions on Automatic Control, 2005, 50(5): 655-661.
[3]Ren Wei, Atkins E. Distributed multi-vehicle coordinated control via local information exchange[J].International Journal of Robust and Nonlinear Control, 2007,17:1002-1033.
[4]Yu Wenwu, Chen Guanrong, Cao Ming. Some necessary and sufficient conditions for second-order consensus in multi-agent dynamical systems[J]. Automatica, 2010, 46: 1089-1095.
[5]Yang Tao, Meng Ziyang, Dimarogonas D V,et al. Global consensus for discrete-time multi-agent systems with input saturation constraints[J]. Automatica,2014,50: 499-506.
[6]Ren Wei. Consensus based formation control strategies for multi-vehicle systems[C]//Proceedings of the 2006 American Control Conference. Minneapolis, Minnesota, USA, June 14-16, 2006:4237-4242.
[7]Meng Deyuan, Jia Yingmin, Du Junping, et al. On iterative learning algorithms for the formation control of nonlinear multi-agent systems[J]. Automatica, 2014, 50: 291-295.
[8]Lei Bin, Chen Hao, Zeng Liangcai, et al. Consensus algorithm with input constraints for swarm robots formation control[C]//Proceedings of the 2015 IEEE 12th International Conference on Networking, Sensing and Control. Taipei, April 9-11, 2015:157-162.
[9]Liu Qiang, Ma Jiachen, Zhang Qi. PSO-based parameters optimization of multi-robot formation navigation in unknown environment[C]//Proceedings of the 10th World Congress on Intelligent Control and Automation. Beijing, July 6-8, 2012:3571-3576.
[10]Li Yangmin, Chen Xin. Leader-formation navigation with sensor constraints[C]//Proceedings of the 2005 IEEE International Conference on Information Acquisition. Hong Kong and Macau, June 27-July 3, 2005: 554-560.
[12]雷斌. 群體機器人系統合作控制問題研究[D]. 武漢:武漢理工大學, 2009.
[責任編輯尚晶]
Formation and navigation control for swarm robots based on leader
ChenHao,LeiBin,GaoQuanjie
(College of Machinery and Automation, Wuhan University of Science and Technology, Wuhan 430081, China)
Abstract:A consensus algorithm for swarm robots based on leader is introduced. On the basis of this algorithm, a formation and navigation control method for swarm robots is proposed. It uses hierarchical control strategy, and the control system is divided into target layer, leader layer and follower layer. Position information of target point in the target layer is sent to the leader, and then the leader is impelled to move towards the target by using the position consensus algorithm. Meanwhile, the leader’s status messages are delivered to his followers in the next layer, and the formation control algorithm based on leader is adopted to control the leader and his followers moving to the target with the right formation. The proposed approach can be used to navigate swarm robots system consisting of multiple subsystems, and its validity is verified by computer simulation and swarm robots experimental platform.
Key words:swarm robots; multi-agent; consensus; leader; formation; navigation; hierarchical control
收稿日期:2016-01-06
基金項目:國家自然科學基金資助項目(61305110);武漢科技大學青年科技骨干培育計劃項目(2011xz007).
作者簡介:陳浩(1989-),男,武漢科技大學碩士生. E-mail:chenhao894@163.com通訊作者:雷斌(1979-),男,武漢科技大學副教授,博士. E-mail:leibin@wust.edu.cn
中圖分類號:TP273
文獻標志碼:A
文章編號:1674-3644(2016)03-0219-05
猜你喜歡
遼寧教育(2022年19期)2022-11-18 07:20:42
公民與法治(2022年5期)2022-07-29 00:47:28
汽車實用技術(2022年9期)2022-05-20 05:51:26
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學問題(2021年4期)2021-11-05 07:02:34
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
裝備制造技術(2020年11期)2021-01-26 00:39:12
中國公共安全(2017年11期)2017-02-06 05:28:08
電測與儀表(2016年7期)2016-04-12 00:22:18
燕山大學學報(2015年4期)2015-12-25 02:19:49
