基于集成光電探測器的仿生偏振光導航傳感器*
2016-05-31 08:38:46王寅龍王志文褚金奎
傳感器與微系統 2016年1期
王 璐, 王寅龍, 王志文, 褚金奎
(大連理工大學 精密與特種加工教育部重點實驗室,遼寧 大連 116024)
?
基于集成光電探測器的仿生偏振光導航傳感器*
王璐, 王寅龍, 王志文, 褚金奎
(大連理工大學 精密與特種加工教育部重點實驗室,遼寧 大連 116024)
摘要:根據沙漠螞蟻(Cataglyphis)導航機制設計了一個體積小、集成度高的偏振光導航傳感器。傳感器采用一個具有多方向偏振檢測功能的集成光電探測器采集光信號,減小分立元件帶來的安裝誤差。設計了以MSP430為核心的硬件電路來對電信號進行控制處理,采用分段導航算法計算導航角,提高傳感器分辨率;設計了實時信息顯示界面,便于實時對傳感器進行監測。在室內對傳感器進行了性能測試,對實驗數據進行處理后得到的導航精度在±0.1°以內。實驗證明:該傳感器精度較高且性能穩定,有著良好的發展應用前景。
關鍵詞:光電探測器; 導航; 傳感器; 仿生; 偏振光
0引言
大自然中的每種生物都有獨特的生存本領,其中,一種叫做Cataglyphis的沙漠螞蟻(以下簡稱沙蟻)就因其驚人的導航本領引起了科學工作者們的興趣。生物學家們觀察發現該種沙蟻到遠離其巢穴200 m的地方覓食后能夠準確地以一條近乎直線路徑返回巢穴,而這其中的路程是它自身身體長度的數千倍[1]。研究表明,沙蟻能夠導航定位的原因在于其復眼具有對天空中偏振光敏感的獨特結構,能夠感知偏振光在天空中的偏振度和方向的分布模式[2~4]。
大連理工大學實驗組是國內最早研究偏振光導航的單位之一,其對天空偏振光導航做了大量的研究工作,研究了天空中偏振光的分布模式,搭建了測量天空偏振光分布的實驗裝置,并通過大量的實驗測量得到了天空偏振光基本的分布模式[5],提出了一種仿沙蟻偏振光導航傳感器模型并設計了傳感器樣機。之后多次改進了傳感器的設計,逐步提高傳感器性能[6~9],還搭建了測試傳感器性能的實驗平臺,對傳感器進行了室內室外測試[10,11],并且進行了機器人導航實驗[12]。
本文設計了以MSP430為控制核心,基于集成光電探測器的仿生偏振光傳感器,有效地縮減了傳感器的體積,利于傳感器的集成化發展;設計了應用在上位機上的實時導航信息顯示界面,方便實時檢測傳感器。在室內均勻光場環境下對傳感器樣機進行了性能標定測試,結果表明:該傳感器精度較高,且穩定。
1傳感器工作原理
沙蟻能夠利用天空中的偏振光進行導航,一是因為天空中的偏振光有著穩定的分布模式;二是因為沙蟻擁有對偏振光敏感的視覺神經系統——其視網膜層(復眼背部邊緣區)上含有大量面向不同方向的視神經感桿,每個感桿僅對與其同向的偏振光敏感,并且這些視神經感桿按一定方向排列。沙蟻在偏振模式下旋轉體軸,偏振復眼對于偏振光的刺激呈現出規則的正弦響應,當其體軸與太陽子午線的方向平行時得到最大響應。沙蟻通過旋轉復眼,找到天空中太陽子午線的方向從而得到自身體軸和太陽子午線夾角。同時,沙蟻通過其內部的羅盤神經元能夠得到太陽子午線方向和正南正北方向夾角,這兩個角度相加即得到自身體軸和正南正北夾角。
本傳感器模仿沙蟻的視覺神經系統設計而成,其主要包括偏振光檢測部分和電信號處理部分。其中,偏振光檢測部分包括一個光電探測器和三個對數放大器,光電探測器內含有三個互成60°的偏振檢測通道,且每個通道由兩個偏振光檢測單元組成,該偏振光檢測部分將入射到金屬光柵上的光信號轉換為電壓信號;而電信號處理部分主要由控制電路組成,其通過一定的算法對對數放大器輸出的電壓信號進行處理從而得到導航角度。
將本傳感器中的三個通道依次定義為0°通道、60°通道、120°通道。
0°,60°,120°通道電壓信號分別為

(1)

(2)
(3)
其中,θ為偏振方位角,V1,V2,V3分別為0°,60°,120°通道的電壓值,d為偏振度。

(4)

(5)

(6)
由式(4)~式(6)可知,V1,V2,V3隨偏振方位角θ變化而變化,其中,以0°通道為例,V1對偏振方位角θ的變化率為

(7)


圖1 偏振光檢測結構輸出電壓曲線Fig 1 Output voltage curves of polarized light detection structure
觀察曲線可知,通道電壓在其峰值附近的變化率很小,因此,將偏振方位角分為不同區間進行分段組合計算。這種分段組合計算方法有效地避開了使用三路通道電壓的峰值附近的點,當偏振方位角變化時電壓變化值比較明顯,這樣能夠有效提高傳感器的分辨率、提高導航精度[13]。
2傳感器結構設計
設計了基于集成光電探測器的仿生偏振光導航傳感器(如圖2所示)。該傳感器的底座邊長63 mm,高30 mm,鏡頭連接部高13 mm,與之前的傳感器[10]相比體積明顯地縮小。
圖2 基于集成光電探測器的仿生偏振光導航傳感器Fig 2 Bionic polarized light navigation sensor based on integrated photodetector
2.1電源部分
本傳感器采用外接5 V的鋰電池供電,一來可以和飛機測試平臺共用一個供電電池來減少測試平臺的載重,再者,通過體積很小的電壓轉換芯片將+5 V電壓轉換為-5 V電壓和3.3 V電壓就可以完成整個傳感器的供電,減小了傳感器的體積。
2.2偏振光檢測部分
根據本傳感器的工作原理可知,本傳感器需要三路通道,每個通道之間相差60°且每個通道具有一對偏振方向相互垂直的偏振光檢測單元,本傳感器采用了一個具有多方向偏振檢測功能的光電探測器[13](如圖3所示)實現該目標。該光電探測器分為兩部分,上面的部分為利用納米壓印技術和金屬蒸鍍工藝制作的雙層金屬納米光柵,六個方向的金屬納米光柵全部集成在一片板子上,下面的部分為硅基光電探測器。該光電探測器制作簡單,體積小,能夠消除分立元件的安裝誤差,使傳感器部件的安裝變得簡易,并且有效地減小了傳感器的體積,提高了本傳感器的集成度。

圖3 光電探測器Fig 3 Photodetector
光電探測器將入射到其上的光信號轉變為電流信號輸出,其后,三組電流信號通過精密對數運算放大器LOG104轉變為電壓信號,放大系數為0.5。對數比例運算消除了外界對導航角度的影響,同時縮小了電壓信號的變化范圍以便于處理。
2.3控制處理部分
采用TI公司的MSP430F4794型號的芯片作為控制處理芯片。該芯片最顯著的特點是能夠超低功耗運行且CPU在1.8~3.6 V寬電壓范圍內都可以工作,其次,MSP430單片機采用模塊化的結構,每個模塊都有獨立而完整的結構,同一種模塊的使用方式和寄存器都相同并且MSP430單片機每年都會推出新型號的單片機,便于以后傳感器的更新換代。
本傳感器利用MSP430單片機內置的16位Σ-Δ型ADC(即SD16模塊)進行A/D轉換,且通過串口將導航角度信息和經緯度信息輸出到上位機。
本傳感器利用u-blox公司的NEO—M8N模塊采集經緯度信息。NEO-M8N模塊是u—blox公司的M8系列中的一款,該模塊最大的特點是能夠同時獲取和跟蹤不同的全球導航衛星系統以獲得更廣闊的覆蓋范圍和更高的精度,即使在GNSS惡劣的環境下仍然能夠保持較高的準確性和可用性。
3上位機顯示界面設計
利用LabVIEW設計了三路電壓和偏振方位角的實時顯示界面,可以實時顯示數值和一定時間內的波形。傳感器通過串口RS—232與上位機連接。該顯示界面便于操作者判斷傳感器的好壞和信號的質量。
4性能測試
利用傳感器標定裝置模擬偏振環境(如圖4所示),在室內對傳感器進行標定。重復進行4次實驗,實驗數據如表1所示。

圖4 實驗標定裝置Fig 4 Experimental calibration device
角度(°)4次實驗角度(°)123400.1960.1900.0860.1171010.17910.25110.06910.1142020.19920.30020.08720.1653030.30130.40430.22330.3124040.58340.66840.53740.596?????100100.01299.89599.95699.961110109.925109.889109.953109.899?????170170.110169.800169.867169.982180180.129179.741179.849179.969
對上述數據進行處理,得到傳感器輸出角度的原始誤差曲線(如圖5所示)。從該圖中可以看出傳感器輸出的原始角度誤差在±0.9°以內且該角度誤差按一定規律分布。利用最小二乘支持向量機進行補償[9],從而得到對各組數據進行補償后的誤差曲線,各組數據補償后的誤差均在±0.1°內,以其中一組數據為例的補償后的誤差曲線如圖6所示。
圖5 原始角度誤差Fig 5 Original angle error
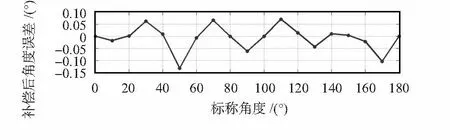
圖6 最小二乘支持向量機補償后誤差Fig 6 Error after compensation by LS-SVM
5結論
本文設計了基于集成光電探測器的仿生偏振光導航傳感器,該傳感器體積小、功耗低。在室內對傳感器進行了性能測試并對實驗數據進行了處理,得出傳感器原始誤差在±0.9°以內,誤差補償后導航精度在±0.1°以內。實驗證明:該傳感器精度較高且性能穩定,具有良好的發展應用前景。
參考文獻:
[1]Wehner R.Spatial organization of foraging behavior in individually searching desert ants,Cataglyphis (Sahara desert) and Ocymyrmex(Namib desert)[J].Experientia Supplementum,1987(54):15-42.
[2]Yimit A,Huang X,Xu Y,et al.Development of a composite optical waveguide sensor for immunoglobuling[J].Chemistry Letters,2003,32(1):86-87.
[3]Potyrailo R A,Hobbs S E,Hieftje G M.Optical waveguide sensors in analytical chemistry:Today’s instrumentation,applications and trends for future development[J].Fresenius’ Journal of Analytical Chemistry,1998,362(4):349-373.
[4]Yimit A,Itoh K,Murabayashi M.Detection of ammonia in the PPT range based on a composite optical waveguide pH sensor[J].Sensors and Actuators B:Chemical,2003,88(3):239-245.
[5]崔巖,曹楠楠,褚金奎,等.天空偏振光測量系統的設計[J].光學·精密工程,2009,17(6):14-31.
[6]褚金奎,趙開春.仿昆蟲復眼偏振敏感測角光電模型研究[J].微納電子技術,2005,42(12):541-545.
[7]張強,趙開春,褚金奎,等.一種嵌入式仿生測角傳感器的設計與實現[J].傳感器與微系統,2008,27(9):106-108.
[8]趙開春,褚金奎,張強,等.新型仿生偏振測角傳感器及角度誤差補償算法[J].宇航學報,2009,30(2):503-509.
[9]褚金奎,林林,陳文靜,等.基于 MSP430 的仿生偏振光導航傳感器的設計與實現[J].傳感器與微系統,2012,31(8):107-110.
[10] Chu J,Zhao K,Zhang Q,et al.Construction and performance test of a novel polarization sensor for navigation[J].Sensors and Actuators A:Physical,2008,148(1):75-82.
[11] 褚金奎,趙開春,王體昌,等.仿生偏振導航傳感器實驗模型的構建與標定[J].微納電子技術,2007,44(7):376-378.
[12] 褚金奎,陳文靜,王洪青,等.基于偏振光傳感器的移動機器人導航實驗[J].光學·精密工程,2011,19(10):2419.
[13] Chu J,Wang Z,Zhang Y,et al.Integrated blue-sensitive polarization-dependent photodetector[J].Journal of Micro/Nano lithography,MEMS,and MOEMS,2013,12(3):33005.
王璐(1988-),女,遼寧撫順人,碩士研究生,研究方向為偏振光傳感器。
Bionic polarized light navigation sensor based on integrated photodetector*
WANG Lu, WANG Yin-long, WANG Zhi-wen, CHU Jin-kui
(Laboratory of Technology Precision & Non-traditional Machining,Ministry of Education, Dalian University of Technology,Dalian 116024,China)
Abstract:A polarization navigation sensor of small size and high integration is designed according to Desert ants Cataglyphis navigation mechanism.In order to decrease installation error caused by discrete components,this sensor uses an integrated photodetector to collect light signal.Hardware circuit of this sensor is designed based on MSP430 microcontroller;in order to improve the resolution of the sensor,subsection navigation algorithm is used to calculate navigation angle;real-time information display interface is designed for sensor monitoring.Performance tests on this sensor is carried out indoors,the results show the navigation precision is within ±0.1° after experimental datas are processed.The experiment shows that the sensor has high precision and stable property,and it has widespread application prospect in the future.
Key words:photodetector; navigation; sensor; bionic; polarized light
作者簡介:
中圖分類號:TP 212
文獻標識碼:A
文章編號:1000—9787(2016)01—0091—04
*基金項目:國家自然科學基金資助項目(51305057);國家“973”重點基礎研究發展計劃資助項目(2011CB302105)
收稿日期:2015—04—13
DOI:10.13873/J.1000—9787(2016)01—0091—04
