四足攀爬機器人的研制
2016-05-30 10:48:04王新王雪微
科技尚品
2016年1期
關鍵詞:工作原理
王新 王雪微
摘 要:研制了一種四足結構的墻壁爬升機器人,通過吸盤實現在較光滑的墻體上或天花板上行走,通過自身攜帶的監視裝置實現對高空墻體或玻璃的檢驗,從而避免人親自工作帶來的危險。鏤空式機械臂以及超薄底板減輕重量;二級活動式關節、球關節與懸浮支架的結合,實現了機器人的穩定與靈活行動;十字交叉式吸盤增大與物體接觸的面積,更有利于表面吸附,更利于機器人的行走。
關鍵詞:總體結構;工作原理;十字吸盤
攀爬機器人是指可以在垂直壁上進行作業的機器人,作為高空極限作業的一種自動機械裝置,越來越受到人們的重視。目前攀爬機器人在各個領域中得到了廣泛的應用和發展:對核廢液儲罐進行視覺檢查、維修;對石油罐內外壁面的日常維護以及防銹除銹處理;高層建筑壁面清洗、玻璃清潔;消防作業中救援物資的傳遞,現場勘查等。隨著微機械電子技術、微驅動器技術、高分子材料技術和能源供給方面等高科技領域的發展,各種攀爬機器人的功能都會更加先進,也必將深入到國民生產的各個部門和人們日常生活的各個方面。
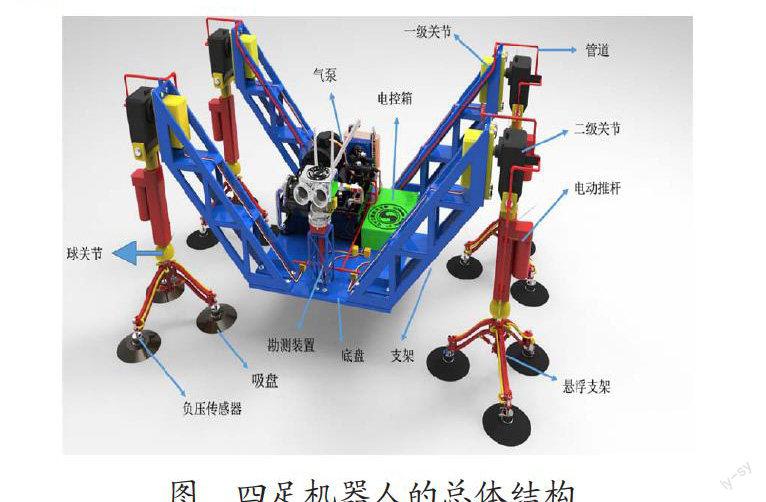
1 總體結構
四足吸盤機器人由支架、底盤、一級關節、二級關節、球關節、電動推桿、懸浮支架、氣動系統、電氣系統、勘測系統、吸盤足組成。在吸盤足的末端“腳”上裝有3個吸盤,每個吸盤上都裝有換氣閥,每個足上的3個吸盤采用可調節懸浮式支架以及負壓傳感器……
登錄APP查看全文
猜你喜歡
科學與財富(2016年29期)2016-12-27 16:31:30
中國新技術新產品(2016年23期)2016-12-26 09:43:17
科學與財富(2016年18期)2016-12-22 19:31:13
科學與財富(2016年18期)2016-12-22 18:17:21
現代企業文化·理論版(2016年19期)2016-12-21 08:32:27
科學與財富(2016年26期)2016-12-01 21:17:46
中小企業管理與科技·上旬刊(2016年11期)2016-11-28 21:21:49
科技視界(2016年18期)2016-11-03 22:36:30
中國科技博覽(2016年18期)2016-10-19 11:24:50
科學與財富(2016年28期)2016-10-14 01:59:13
