具有全向推力矢量的六旋翼無人機設計與建模
2016-05-23 09:31:20馬振強董文瀚解武杰邵鵬杰
飛行力學 2016年2期
馬振強, 董文瀚, 解武杰, 邵鵬杰
(空軍工程大學 航空航天工程學院, 陜西 西安 710038)
?
具有全向推力矢量的六旋翼無人機設計與建模
馬振強, 董文瀚, 解武杰, 邵鵬杰
(空軍工程大學 航空航天工程學院, 陜西 西安 710038)
摘要:針對常規旋翼飛行器飛行速度小和加速飛行時不能保持機體水平姿態等問題,提出了一種具有全向推力矢量的六旋翼無人機設計方案;分析了推力矢量六旋翼在可傾轉旋翼結構傾轉不同角度時的飛行模式;建立了推力矢量六旋翼的動力學模型,并針對動力學模型設計了PID控制器;最后對動力學模型進行數值仿真驗證。結果表明,所設計的推力矢量六旋翼能夠懸停,且可以在定速飛行中保持飛行器的水平姿態。
關鍵詞:六旋翼無人機; 推力矢量; 動力學模型; 飛行模式; PID控制
0引言
多旋翼飛行器是一種電動的、能夠垂直起降的、可以遙控、自主飛行的飛行器,具有結構簡單、飛行穩定、易于操控、低噪聲、攜帶方便等特點,非常適合于執行中短距離的飛行任務[1-4]。關于常規旋翼飛行器設計和控制理論的研究已經比較成熟。文獻[5]介紹了兩種旋翼飛行器建模方法,并進行了仿真對比;文獻[6]介紹了一種具有共軸雙旋翼的新型的六旋翼結構;文獻[7]使用PID+LQR方法對六旋翼飛行器進行控制,取得了較好的效果。
雖然對常規旋翼飛行器的研究已經比較成熟,但是由于其動力設計上的特點,常規旋翼飛行器的飛行速度和加速度較小,且加速飛行時,機體不能保持水平姿態。為克服上述問題,目前采用最多的是傾轉旋翼方案。文獻[8]設計了一種小型傾轉旋翼飛行器,并進行了試飛;文獻[9]用改進的葉元法和動量法建立了旋翼數模型,給出了旋翼下洗對機翼的影響。雖然傾轉旋翼無人機可以很好地解決上述問題,但是其結構相當復雜,且安全性和穩定性較低。
本文提出的具有全向推力矢量的六旋翼飛行器可以在保持機體水平姿態下,通過可傾轉旋翼繞兩正交軸的旋轉傾轉一定角度,為飛行器提供任意方向的推力。
1具有全向推力矢量六旋翼的結構設計
推力矢量六旋翼飛行器在常規四旋翼飛行器的基礎上,增加了一組可傾轉的共軸雙旋翼結構(見圖1)。增加的共軸雙旋翼結構可以繞電機支撐桿軸線旋轉(見圖2),支撐桿可以繞桿的中點旋轉,兩種傾轉方式相結合,可以使此共軸雙旋翼結構指向任意方向,給常規四旋翼增加推力矢量。推力矢量六旋翼外側相鄰的旋翼之間夾角為90°,分別將外側四個旋翼編為1號、2號、3號和4號,中間旋翼分別編為5號和6號。

圖1 全向推力矢量六旋翼飛行器Fig.1 The omni-directional thrust vector hexarotor UAV
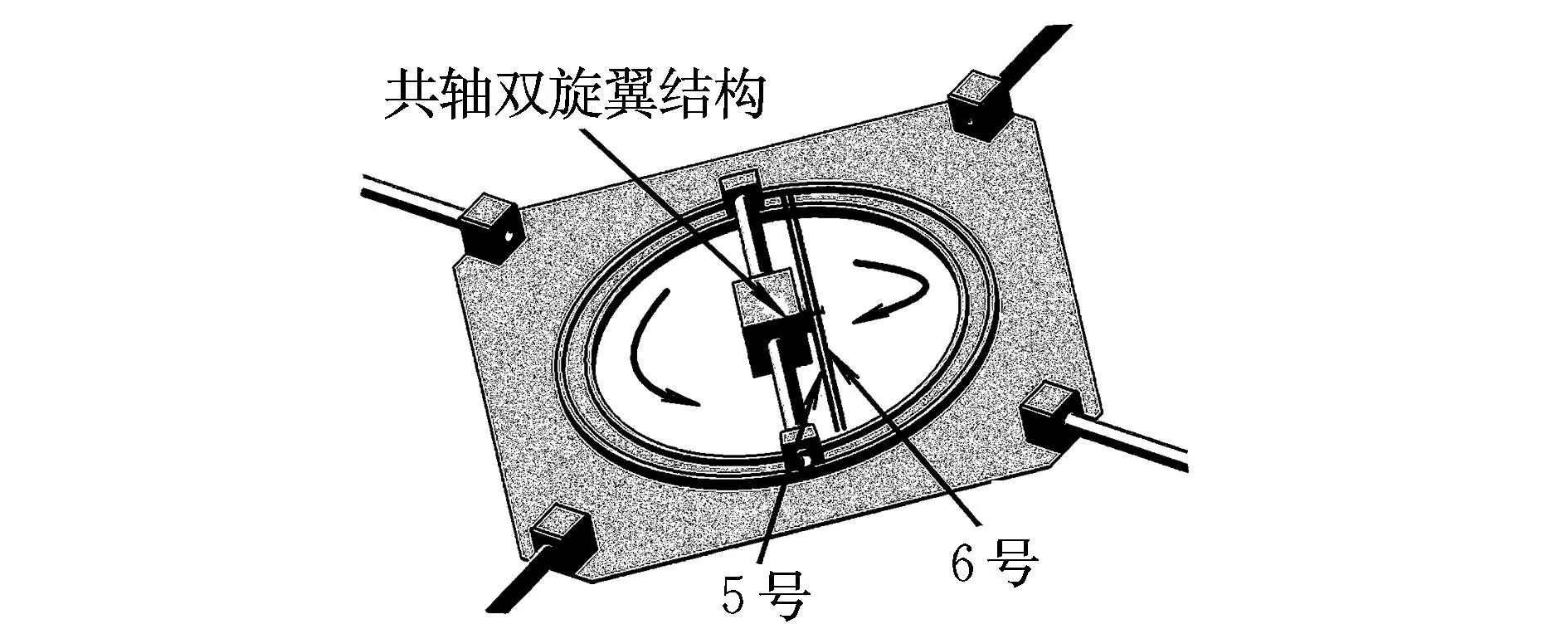
圖2 傾轉旋翼結構Fig.2 Structure of tilting rotor
2動力學建模
假設1:飛行器重心始終位于中心電機位置上。
假設2:中間旋翼結構傾轉引起的轉動慣量變化忽略不計。
文獻[10]給出了從機體坐標系到慣性坐標系的方向余弦矩陣為:
(1)
式中:S為正弦函數sin的縮寫;C為余弦函數cos的縮寫;ψ,θ,φ分別為機體坐標系下的偏航角、俯仰角、滾轉角。在機體坐標系下飛行器的推力為:
(2)
式中:α1為傾轉旋翼機構繞y軸旋轉的角度;α2為傾轉旋翼機構繞z軸旋轉的角度。根據FE=RFB,在慣性坐標系下飛行器的推力為:
FE=
(3)
考慮各個方向的阻力,由牛頓第二定律得:
在Docker鏡像上傳到鏡像倉庫之后,部署中心可在不同的運行環境下根據特定的鏡像啟動相應的Docker容器。為便于描述,將該容器稱為“服務容器”,包含承載微服務的應用程序及其配置文件。
(4)
(5)

(6)
式中:U1為外側四個旋翼在垂直方向上的控制輸入;U2為可傾轉旋翼的控制輸入;U3為滾轉運動的控制輸入;U4為俯仰運動的控制輸入;U5為偏航運動的控制輸入;kt為拉力系數;kd為旋翼轉速差轉化成扭矩的扭矩系數。
結合式(2)、式(4)~式(6),可得推力矢量六旋翼動力學模型為:
(7a)
(7b)
式中:l為外側相鄰旋翼距離。
3飛行模式分析
具有全向推力矢量的六旋翼無人機飛行原理與常規四旋翼有相似之處,文獻[12-13]對四旋翼的飛行原理進行了介紹。外側4個旋翼的功能是保持飛行器最基本的飛行穩定,中間的可傾轉旋翼轉向相反,且可以傾轉,主要作用有以下三點:一是為飛行器提供全向的推力矢量;二是增大飛行器的最大飛行速度和加速度;三是使飛行器在水平方向運動時,可以保持整個機體的水平狀態。下面對可傾轉旋翼指向不同角度時的運動模式進行分析(見圖3)。
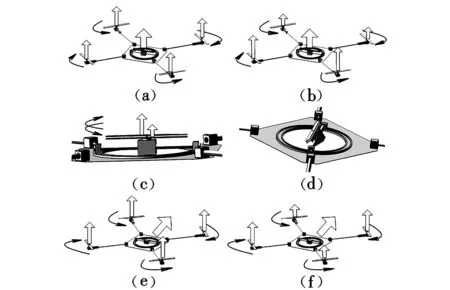
圖3 飛行模式Fig.3 Flight patterns
當可傾轉旋翼指向z軸正方向(α1=0°,α2=0°)時,如圖3(a)所示,所有旋翼為飛行器提供向上的升力,在水平速度為零的條件下,當升力等于重力且豎直方向速度為零時,飛行器處于懸停狀態;當升力小于重力時,飛行器產生向下的加速度;反之,飛行器產生向上的加速度。如圖3(b)所示,當1號和2號旋翼提供的升力減少ΔF,而3號和4號旋翼提供的升力增加ΔF時,飛行器產生俯仰力矩,飛行器可以產生俯仰運動。如圖3(c)所示,當中間旋翼速度差不為零時,飛行器即產生偏航力矩,使飛行器偏轉航向。
當可傾轉旋翼指向x軸正方向(α1=90°,α2=0°)時,如圖3(e)所示,外側4個旋翼為飛行器提供向上的升力,并要保持飛行器的穩定,傾轉旋翼提供向x軸正方向的推力,可以增加飛行器x方向的加速度,使飛行器能在更短的時間內達到一定的速度,也可以在x軸方向達到更大的速度。常規六旋翼實現前向飛行是通過機體向前傾斜了小的角度,產生負的俯仰角,升力產生向前的分量,此分量是飛行器向前飛行的動力,前向推力較小,飛行速度和加速度都比較小,且六旋翼飛行器在飛行中不能保持機體的水平姿態,前向速度與垂直方向速度有耦合。推力矢量六旋翼飛行時只需將中間旋翼傾轉向前即可。兩個旋翼的全部推力都作為前向推力,使飛行器可以具有較大的前向速度。同時前向飛行不需要飛行器產生負的俯仰角,此時飛行器可以保持水平飛行姿態。如圖3(f)所示,1號和3號、2號和4號旋翼轉速相同,但1號和2號旋翼轉速不同,即可產生偏航力矩,使飛行器產生偏航運動。
當傾轉旋翼繞y軸旋轉α1角度,繞z軸旋轉α2角度(指向任意方向)時,如圖3(d)所示,可傾轉旋翼指向其他任意方向時,都可以在該方向上產生較大的推力,飛行方向可以向任意方向快速改變,比常規六旋翼有更好的機動性。當飛行器受到擾動產生滾轉和俯仰角時,可以通過外側4個旋翼調整飛行器姿態,使其穩定飛行。
4控制器設計及仿真
4.1控制器設計
通過定義U1,U2,U3,U4和U5,這個復雜的非線性、強耦合系統被分解成5個獨立的控制通道。控制器設計分為內環控制和外環控制。內環回路是姿態控制回路,外環回路是位移控制回路。四旋翼雙回路控制結構如圖4所示。圖中,Pr為期望位置;ψr為期望偏航角;θr為期望俯仰角;φr為期望歐拉角。
仿真所用飛行器的參數如表1所示。
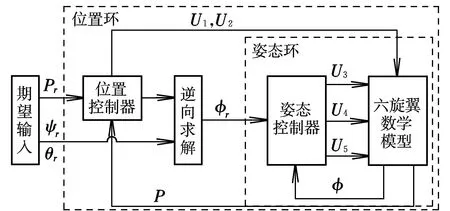
圖4 控制系統結構Fig.4 Structure of control system

參數數值參數數值m/kg1.2625Iz/kg·m20.04975l/m0.642kt1.5e-05Ix/kg·m20.03151kd2.8e-07Iy/kg·m20.03152K0.05
傾轉旋翼指向z軸正方向和指向x軸正方向是飛行器最常用的兩種飛行模式,針對這兩種飛行模式分別設計了PID控制器。PID控制是一種基于目標與實際的誤差的反饋控制,PID控制器設計如圖5所示。
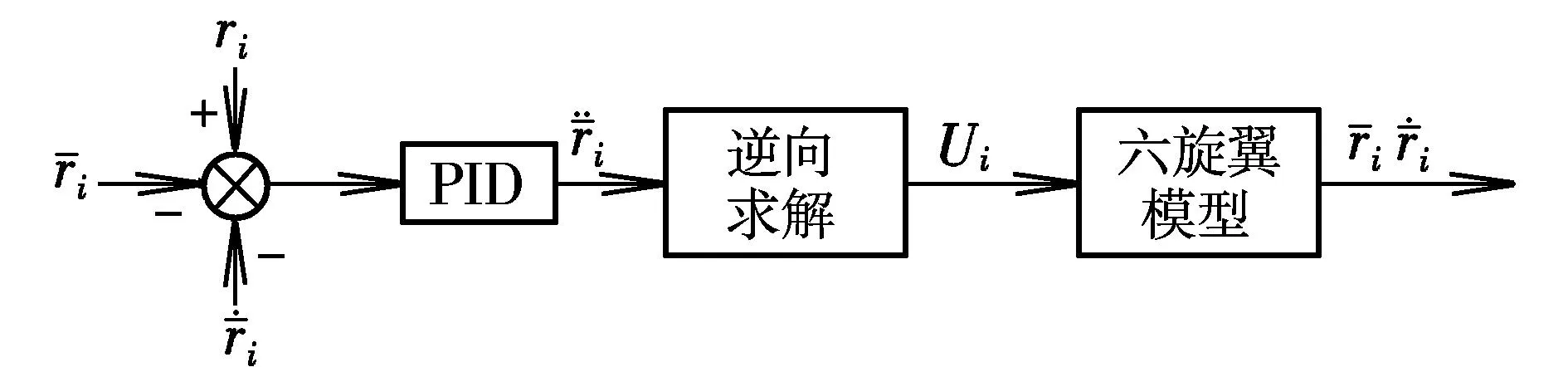
圖5 PID控制器結構Fig.5 Structure of PID controller

(8)
其中:
A=Sα1Cα2CψCθ,B=Sα1Sα2CψSθSφ
C=CψSθCφ+SψSφ,D=-Sα1Cα2Sθ
E=Sα1Sα2CθSφ,F=Cα1CθCφ
4.2傾轉旋翼指向z軸正方向
傾轉旋翼指向z軸正方向時,對飛行器進行定點懸停控制仿真。控制器通過引入位置和姿態角誤差,修正飛行器姿態和位置。飛行器從原點起飛,給定懸停位置坐標為(10,10,10)m。此狀態下的PID控制器的具體參數如表2所示。飛行器可以從原點起飛,最終在較短時間內懸停于指定位置,且調節時間、超調量等動態性能較好,如圖6~圖8所示。
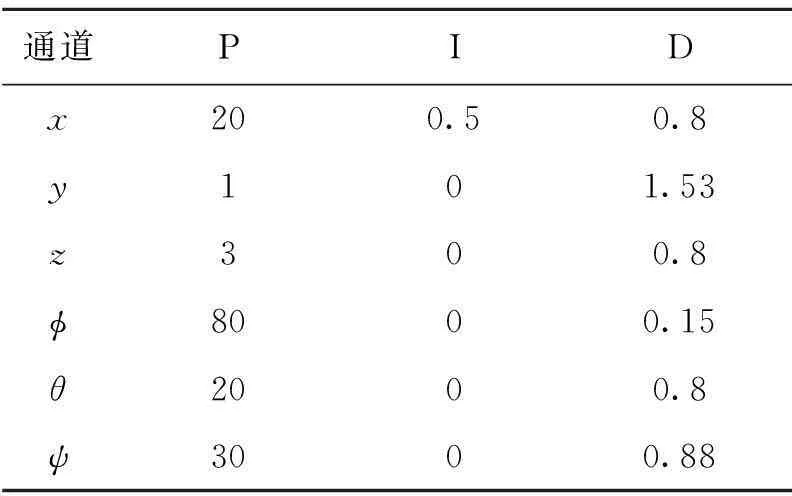
表2 PID控制器參數

圖6 x方向位移變化Fig.6 Variations of displacement in x direction

圖7 y方向位移變化Fig.7 Variations of displacement in y direction

圖8 z方向位移變化Fig.8 Variations of displacement in z direction
4.3傾轉旋翼指向x軸正方向
傾轉旋翼指向x軸正方向時,對飛行器進行定速飛行控制仿真。飛行器從原點起飛,到達10 m高度后,以20 m/s的穩定速度向x正方向飛行。此狀態下的PID控制器的參數如表3所示。位移和速度曲線如圖9和圖10所示。

表3 PID控制器參數
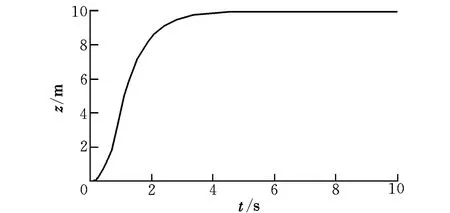
圖9 z方向位移變化Fig.9 Variations of displacement in z direction

圖10 x方向速度變化Fig.10 Variations of speed in x direction
由圖可知,飛行器可以按照預定的狀態穩定飛行,且調節時間和超調量等動態性能較好。
5結束語
針對常規旋翼飛行器飛行速度和加速度小、傾轉旋翼飛行器結構復雜、安全性低等問題,設計了具有推力矢量的六旋翼飛行器。可傾轉旋翼可以在飛行器保持機體水平姿態的情況下,為飛行器提供任意方向的推力,飛行器具有很強的機動性。建立了飛行器的動力學模型,并進行了仿真驗證。仿真結果表明,在可傾轉旋翼指向z軸正方向和x軸正方向時,飛行器可以穩定飛行。
參考文獻:
[1]楊成順,楊忠,許德智,等.新型六旋翼飛行器的軌跡跟蹤控制[J].系統工程與電子技術,2012,34(10):2098-2105.
[2]聶博文,馬宏緒,王劍,等.微小型四旋翼飛行器的研究現狀與關鍵技術[J].電光與控制,2007,14(6):113-117.
[3]岳基隆,張慶杰,朱華勇.微小型四旋翼無人機研究進展及關鍵技術淺析[J].電光與控制,2010,17(10):46-52.
[4]Angel E,Rosas A.Path tracking control for an autonomous four rotor mini-helicopter[R].Canada:University of Calgary,2007.
[5]Rubio J D,Cruz J H P,Zamudio Z,et al.Comparison of two quadrotor dynamic models[J].IEEE Latin America Transactions,2014,12(4):531-537.
[6]張陽勝,劉榮.一種新型六旋翼飛行器的設計[J].機械與電子,2010(5):64-66.
[7]Salim N D,Derawi D,Abdullah S S,et al.PID plus LQR attitude control for hexarotor MAV[C]//IEEE International Conference on Industrial Technology (ICIT).Busan,Korea,2014:85-90.
[8]Song Yanguo,Wang Huanjin.Design of flight control system for a small unmanned tilt rotor aircraft[J].Chinese Journal of Aeronautics,2009,22(3):250-256.
[9]楊喜立,朱紀洪,黃興李,等.傾轉旋翼飛機建模與仿真[J].航空學報,2006,27(4):584-587.
[10]Li Jun,Li Yuntang.Dynamic analysis and PID control for a quadrotor[C]//Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation.Beijing,2011:573-578.
[11]劉曉杰.基于視覺的微小型四旋翼飛行器位姿估計研究與實現[D].長春:吉林大學,2009.
[12]黃依新.四旋翼飛行器姿態控制方法研究[D].成都:西南交通大學,2014.
[13]甄紅濤,齊曉慧,夏明旗,等.四旋翼無人直升機飛行控制技術綜述[J].飛行力學,2012,30(4):295-299.
(編輯:方春玲)
Design and modeling of an omni-directional thrust vector hexarotor UAV
MA Zhen-qiang, DONG Wen-han, XIE Wu-jie, SHAO Peng-jie
(Aeronautics and Astronautics Engineering College, AFEU, Xi’an 710038, China)
Abstract:In order to increase the flight speed of the conventional hexarotor UAV, meanwhile to keep horizontal attitude during the accelerated flight, a design scheme of an omni-directional vector thrust hexarotor UAV is proposed in this paper. The different flight modes, when the tilting rotor rotates to different angles, are analyzed. The dynamic model for the vector thrust hexarotor is established and the PID controller is designed for the model. The simulation results show that the designed vector thrust hexarotor UAV could keep hovering and maintain horizontal attitude in the flight at given speed.
Key words:hexarotor UAV; thrust vector; dynamic model; flight mode; PID control
作者簡介:馬振強(1991-),男,吉林遼源人,碩士研究生,研究方向為多旋翼建模、故障診斷與容錯控制。
收稿日期:2015-07-21;
修訂日期:2015-11-07; 網絡出版時間:2016-01-10 14:09
中圖分類號:V249.1
文獻標識碼:A
文章編號:1002-0853(2016)02-0032-05
