基于PLC的模糊PID控制在電梯上的應用
2016-05-18 04:47:28
電子制作 2016年18期
基于PLC的模糊PID控制在電梯上的應用
張鳳強 張 穎 張 丹 沈陽建筑大學信息與控制工程學院
本文將模糊控制與PID控制結合起來,通過先進的PLC可編程控制器來實現,完成基于PLC的模糊PID電梯控制系統,并通過計算機仿真和實驗驗證其控制性能好,響應快,過渡時間短的特點。
PLC;電梯系統;模糊PID控制
引言
傳統的PID控制策略針對于時變系統,即當系統參數變化時難以較快適應控制系統,最終不能較好達到預期效果。本文在PID控制的基礎上加入模糊控制,對其參數進行模糊化處理,以實現系統的靈活性和穩定性。
1. 模糊PID控制器
模糊PID控制器[1]就是將模糊控制器與PID控制器結合起來,對PID的輸入參數進行模糊自適應處理,這樣相比于單獨的模糊控制器,可以提高靈敏度,減少響應時間,及時調整系統,削弱外界信號的干擾,更好地適應系統的不確定性和復雜性,具體的控制原理如圖1所示。
2.模糊控制算法的PLC實現
模糊控制器的核心是模糊控制算法,該算法是根據實際生產過程和操作人員的經驗來完成模糊控制規則表,然后按照模糊推理規則得出相應的控制量,再經過在線反復的調試和修改,最后得到模糊控制表。如表1所示。

圖1 模糊PID控制系統圖
以PID的三個參數KP,Ki,Kd為輸出變量,關于KP,Ki,Kd相應的模糊變量子集為{NB,NM,NS,ZO,PS,PM,PB},KP論域為{-0.3,0.3},Ki論域為{-0.06,0.06},Kd論域為{-3,3}。經過復雜的處理及現場調試,最終得到關于三個輸出參數模糊控制規則表。此處以KP為例進行闡述。
為實現PLC控制,本文采用查表法,為方便程序設計,將{NB,NM,NS,ZO,PS,PM,PB}轉化為{0,1,2,3,4,5,6},在將轉化后的表2-1,表2-2,表2-3內元素按從上到下,從左到右的順序逐個存入MD0-MD146中,Ec存入MD147中,E存入MD148中,本文設定模糊控制變量的基礎地址是100,人為舍得偏移量是Ec×5+E,最終可得到控制量的地址為100+Ec×5+E。
3.電梯系統的軟件設計
電梯的初始化程序主要功能是在電梯的安裝和電梯發生故障后來確定電梯停靠位置,在電梯發生故障后,啟動初始化程序,使電梯向下運行至限位開關處,然后停止運行,再打開上行接觸器,使電梯向上運行至1層的上平層信號處,此時斷開上行接觸器,電梯停止運行并發出準備就緒信號,初始化程序結束[2]。相關流程圖程序如圖2所示。
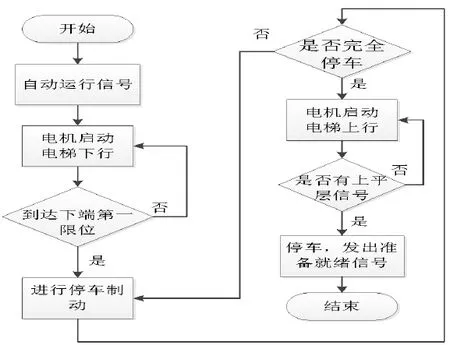
圖2 初始化流程圖

表1 模糊控制規則表
4.電梯轎廂與開關門控制程序
4.1 電梯轎廂向上運行
電梯轎廂運行時要先判斷其運行趨勢,電梯轎廂的運行趨勢與某層(非呼梯最高層)呼梯的方向(上或下)相同時,電梯轎廂才會停止在該層。以最高為6層的電梯,轎廂處于1層為例,當2層有向上呼梯,5層有向上呼梯,則電梯轎廂依次停在2層和5層,而當2層有向下呼梯,5層有呼梯信號時,電梯轎廂會先上升到5層,此時經過2層時電梯轎廂不停止。
4.2 電梯轎廂向下運行
電梯轎廂向下運行的原理與向上運行原理基本一致,同樣以最高為6層的電梯,轎廂處于6層為例,此時當5層有向下呼梯信號,2層有呼梯信號,電梯轎廂會依次停在5層和2層,而當5層有向上呼梯信號,2層有呼梯信號時,電梯轎廂會先下降的2層,此時經過5時,電梯轎廂不停止。
4.3 開關門控制程序
電梯轎廂的開關門控制程序要做的很細致,將每一個關系到開關門的信號都要考慮進去,否則會很容易發生故障。
5. 仿真實驗
仿真實驗采用E-Elevator仿真軟件,WINCC界面組態軟件和西門子 S-1200控制器,首先將程序下載到控制器中,并開始運行,在E-Elevator仿真軟件中可看到電梯按照預設的要求進行運行,從視覺上觀察其工作狀態,我們可以通過組態軟件WINCC可以清楚的進行電梯的內部呼梯,外部呼梯,電梯調試,電梯參數修改,從而觀察電梯的內部運行狀態。
6. 結論
通過模糊PID控制電梯系統的仿真運行效果可以看出,系統具有很好的穩定性,電梯在運行過程中完全按照預設的路線和速度工作,可以大大提高乘客的舒適度。
結果表明,電梯控制系統使用模糊 PID控制策略以后很有效的提高了系統的適應能力和魯棒性,改善了系統的動、靜態品質,相對PID控制來說控制效果更加令人滿意。
[1]楊玉杰. 基于PLC的模糊PID電梯控制系統研究[D]. 天津:天津大學電氣與自動化工程學院,2013.
[2]周樺. 電梯PLC控制系統的設計與實現[D]. 成都:電子科技大學,2012.
張鳳強(1993-),男,沈陽建筑大學學生,電氣工程及其自動化
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
