雙慣量彈性負(fù)載系統(tǒng)機(jī)械諧振機(jī)理分析及諧振特征快速辨識
2016-05-16 12:32:40楊明郝亮徐殿國
電機(jī)與控制學(xué)報(bào) 2016年4期
楊明, 郝亮, 徐殿國
(哈爾濱工業(yè)大學(xué) 電氣工程系,黑龍江 哈爾濱 150001)
?
雙慣量彈性負(fù)載系統(tǒng)機(jī)械諧振機(jī)理分析及諧振特征快速辨識
楊明,郝亮,徐殿國
(哈爾濱工業(yè)大學(xué) 電氣工程系,黑龍江 哈爾濱 150001)
摘要:重點(diǎn)分析帶彈性傳動(dòng)裝置的雙慣量系統(tǒng)機(jī)械諧振機(jī)理,首先對比連續(xù)系統(tǒng)開、閉環(huán)幅頻特性與固有諧振特征的定量關(guān)系,確定諧振模式;進(jìn)一步針對離散系統(tǒng),分析控制器剛度對離散閉環(huán)系統(tǒng)諧振的影響,確定離散系統(tǒng)持續(xù)振蕩狀態(tài)下諧振頻率即為NTF頻率。通過諧振機(jī)理的分析可知固有機(jī)械諧振特征對于消除諧振影響顯得尤為重要。研究了基于偽隨機(jī)序列和Chirp信號的兩種快速諧振特性獲取方法。通過辨識的諧振頻率可以確定陷波濾波器參數(shù)。仿真及實(shí)驗(yàn)結(jié)果證實(shí)了該諧振特征獲取方法的準(zhǔn)確性和在此基礎(chǔ)上的諧振抑制效果。
關(guān)鍵詞:伺服系統(tǒng);機(jī)械諧振;諧振特征辨識;偽隨機(jī)序列;Chirp信號
0引言
伺服驅(qū)動(dòng)系統(tǒng)的機(jī)械部分經(jīng)常會(huì)用到傳動(dòng)軸、聯(lián)軸器、變速裝置等傳動(dòng)裝置連接電機(jī)與負(fù)載。由于實(shí)際系統(tǒng)中傳動(dòng)裝置彈性系數(shù)不是無窮大,尤其是在傳動(dòng)軸細(xì)長的情況下,彈性因素的影響不能忽略,就會(huì)引發(fā)機(jī)械諧振[1]。諧振的存在會(huì)對系統(tǒng)的機(jī)械傳動(dòng)部分造成損害,特別是在中高壓大功率電機(jī)驅(qū)動(dòng)系統(tǒng)中如果不采取抑制措施可能會(huì)產(chǎn)生斷軸等嚴(yán)重事故。
早期避免機(jī)械諧振的方法很簡單,就是降低速度給定的階躍值或變化斜率,但這必然會(huì)限制系統(tǒng)的頻響帶寬。當(dāng)前各種研究方案主要針對僅測量驅(qū)動(dòng)電機(jī)側(cè)的位置、轉(zhuǎn)速信息,不針對傳動(dòng)裝置及負(fù)載側(cè)增加傳感器。眾多的研究方案可大致分為2類:主動(dòng)方式和被動(dòng)方式。
所謂主動(dòng)方式就是用主動(dòng)改變控制器參數(shù)或控制器結(jié)構(gòu)來消除機(jī)械諧振。主動(dòng)方式可分為單純PI控制(雙自由度PI控制、RRC)[2-4]、基于PI的狀態(tài)反饋控制[5-7]、魯棒控制、模型預(yù)測控制等高級算法應(yīng)用[8-11]。
所謂被動(dòng)方式就是在速度環(huán)輸出與電流環(huán)給定之間插入陷波濾波器,而控制系統(tǒng)其他設(shè)計(jì)不變。利用陷波濾波器衰減指定頻率的幅值而對其他頻率沒有影響的特點(diǎn),而且其參數(shù)設(shè)計(jì)物理概念明確、簡單易行,串入多個(gè)陷波濾波器即可抑制多個(gè)諧振頻率,是目前大規(guī)模商用伺服系統(tǒng)普遍采用的方案[12-14]。被動(dòng)方式又分為在線與離線兩種模式:在線模式為在系統(tǒng)運(yùn)行過程中時(shí)刻針對當(dāng)前諧振情況進(jìn)行分析獲取,自動(dòng)配置濾波器,占用資源較大,適用于負(fù)載變化頻繁的彈性傳動(dòng)系統(tǒng);離線模式首先通過掃頻等方法獲得系統(tǒng)Bode圖,然后通過分析諧振頻率特性來設(shè)置濾波器參數(shù)。離線方式節(jié)省控制器資源,適用于負(fù)載變化不大的數(shù)控機(jī)床等。
文獻(xiàn)[15]詳細(xì)闡述了定點(diǎn)算法中所遇到的如延時(shí)、量化誤差等各種數(shù)字信號處理問題。陷波濾波器的通帶范圍過寬會(huì)導(dǎo)致較大的相角滯后,為了增加抑制深度而采用窄通帶設(shè)計(jì)又導(dǎo)致受諧振頻帶辨識影響加劇,因此,文獻(xiàn)[16]采用自適應(yīng)陷波濾波器設(shè)計(jì)方案,該方案能夠快速辨識諧振中心頻率并以此調(diào)整濾波器參數(shù)設(shè)計(jì)。盡管陷波濾波器的零極點(diǎn)數(shù)目相等對通帶范圍造成的相角滯后較小,但還是附加了相角滯后,文獻(xiàn)[17]通過相角補(bǔ)償追求零相位滯后,取得一定的效果。
傳統(tǒng)獲取頻率特性的掃頻方式精確度較高,但作用時(shí)間很長,不利于做低頻測試,會(huì)造成低頻的漂移并增加含諧振系統(tǒng)的機(jī)械損害。在文獻(xiàn)[18]考慮到用偽隨機(jī)序列的方法來做掃頻。文獻(xiàn)[19]提出一種基于Welch法的功率譜估計(jì)法。
眾多文獻(xiàn)針對諧振機(jī)理分析不夠徹底,即使獲取諧振特征后如何設(shè)置濾波器參數(shù)也沒有系統(tǒng)研究。本文分析了帶彈性裝置的雙慣量模型,并對伺服系統(tǒng)中的機(jī)械諧振機(jī)理進(jìn)行了研究。分析了連續(xù)閉環(huán)系統(tǒng)中,控制器剛度對諧振頻率的影響。針對離散閉環(huán)系統(tǒng)中由于控制器剛度較大引發(fā)的穩(wěn)態(tài)持續(xù)振蕩條件及諧振特性進(jìn)行了分析,得到陷波濾波器的頻率設(shè)置選擇條件。進(jìn)一步,通過基于偽隨機(jī)序列信號及Chirp信號的2種離線諧振特性快速辨識方法來得到準(zhǔn)確的諧振特性,為被動(dòng)方式抑制機(jī)械諧振提供準(zhǔn)確的諧振參數(shù)。
1機(jī)械諧振特性分析
1.1諧振原理及模型
電機(jī)、傳動(dòng)機(jī)構(gòu)、執(zhí)行機(jī)構(gòu)組成的典型雙慣量機(jī)械傳動(dòng)系統(tǒng)如圖1所示。其中傳動(dòng)軸系聯(lián)接電機(jī)和執(zhí)行機(jī)構(gòu),具有一定的抗扭剛度K和阻尼系數(shù)Cw。當(dāng)傳動(dòng)軸系發(fā)生扭轉(zhuǎn)形變時(shí)將產(chǎn)生轉(zhuǎn)矩Tw。電機(jī)端電磁轉(zhuǎn)矩Te和傳動(dòng)軸系轉(zhuǎn)矩Tw共同作用于轉(zhuǎn)動(dòng)慣量為J1、阻尼系數(shù)為C1的電機(jī)轉(zhuǎn)軸。執(zhí)行機(jī)構(gòu)等效轉(zhuǎn)動(dòng)慣量為J2、阻尼系數(shù)為C2,傳動(dòng)軸系轉(zhuǎn)矩Tw與負(fù)載轉(zhuǎn)矩Tl共同作用于執(zhí)行機(jī)構(gòu)最終決定了負(fù)載轉(zhuǎn)速。根據(jù)以上分析可建立微分方程組,如式(1)所示[20]。

圖1 典型雙慣量機(jī)械傳動(dòng)裝置模型Fig.1 Model of typical 2-mass mechanical system
(1)
可忽略阻尼系數(shù)進(jìn)而對上述微分方程組進(jìn)行拉普拉斯變換,得
(2)
通過式(2)可以推導(dǎo)出如圖2的雙慣量傳動(dòng)模型框圖,進(jìn)而推導(dǎo)出電機(jī)轉(zhuǎn)速與電機(jī)電磁轉(zhuǎn)矩之間的傳遞函數(shù),如式(3)所示。
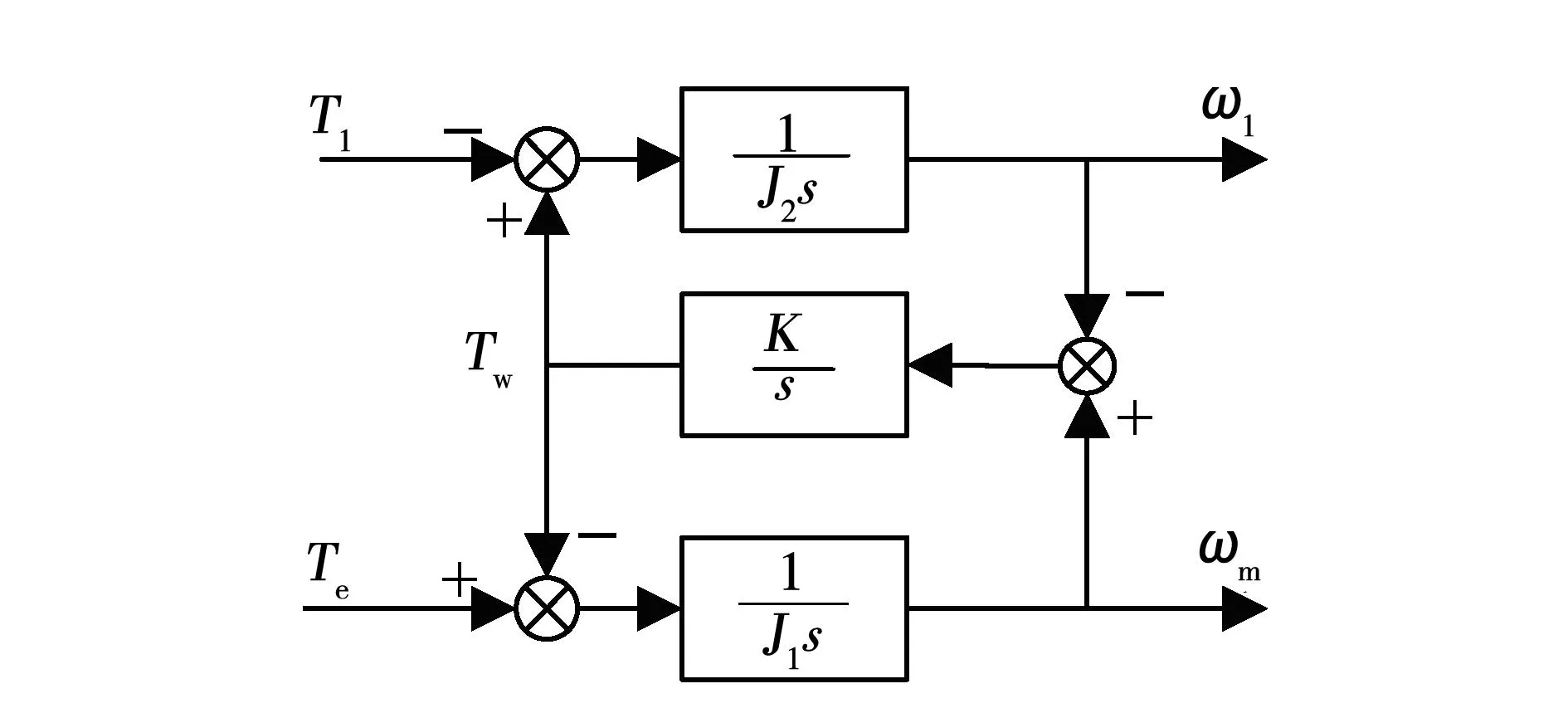
圖2 傳動(dòng)裝置模型框圖Fig.2 Block diagram of mechanical transmission
從式(3)中可以得出,機(jī)械諧振點(diǎn)在傳遞函數(shù)上引入了一對共軛的零極點(diǎn),共軛零點(diǎn)為抗諧振頻率點(diǎn)ARF(anti-resonance frequency),共軛極點(diǎn)為自然振動(dòng)頻率點(diǎn)NTF(natural torsional frequency)。零極點(diǎn)的存在使得系統(tǒng)在特定頻率下的響應(yīng)會(huì)比較強(qiáng)烈,這就會(huì)形成機(jī)械諧振現(xiàn)象。通過式(3)可以得到兩個(gè)諧振點(diǎn)具體頻率及慣量比R的關(guān)系如式(4)所示。
(4)
1.2連續(xù)系統(tǒng)中的諧振
1.2.1開環(huán)系統(tǒng)振蕩
由于理想電流環(huán)具有快速響應(yīng)性,所以可將速度開環(huán),電流閉環(huán)的理想系統(tǒng)近似為諧振模型。通過圖2能夠得到電機(jī)轉(zhuǎn)速與負(fù)載轉(zhuǎn)矩間的傳遞函數(shù)見式(5)。由式(3)、式(5)可以得出電機(jī)轉(zhuǎn)速與電磁轉(zhuǎn)矩和負(fù)載轉(zhuǎn)矩的拉氏表達(dá)式及對應(yīng)的時(shí)域單位階躍響應(yīng)式,見式(6)、式(7)。

(5)
ωm(s)=G1(s)Te(s)-G2(s)Tl(s)=

(6)

(7)
從式(7)中可以看出開環(huán)系統(tǒng)的階躍響應(yīng)會(huì)在斜坡輸出的基礎(chǔ)上疊加NTF頻率的振蕩,振蕩幅值與NTF頻率成反比。而且振蕩頻率值與負(fù)載轉(zhuǎn)矩?zé)o關(guān),所以在分析諧振頻率時(shí)可以不考慮負(fù)載轉(zhuǎn)矩對系統(tǒng)的影響。證明在速度開環(huán)情況下,系統(tǒng)會(huì)以NTF諧振頻率振蕩。
1.2.2閉環(huán)系統(tǒng)振蕩
由于速度環(huán)帶寬遠(yuǎn)遠(yuǎn)小于電流環(huán)帶寬,可在將電流環(huán)近似為1。令速度控制器的傳遞函數(shù)為式(8)時(shí),閉環(huán)系統(tǒng)電機(jī)轉(zhuǎn)速與速度給定間的傳遞函數(shù)為式(9),Kp為速度PI控制器比例系數(shù),Ki為速度PI控制器積分系數(shù)。
(8)

(9)
(s2+2ζ1ω1s+ω12)(s2+2ζ2ω2s+ω22)=0。
(10)
其中ω1和ω2是閉環(huán)下的兩個(gè)自然角頻率,ζ1和ζ2為對應(yīng)頻率下的閉環(huán)阻尼。可以得到下面四組等式:
(11)
(12)

(13)

(14)
系統(tǒng)閉環(huán)帶寬主要受到min(ω1,ω2)的影響,而且通過式(14)發(fā)現(xiàn)min(ω1,ω2)<ωARF,所以閉環(huán)帶寬不會(huì)超過ωARF。圖3為彈性系統(tǒng)ωm/Te、開環(huán)系統(tǒng)及閉環(huán)系統(tǒng)的幅頻曲線。可以發(fā)現(xiàn)由于彈性裝置的引入對系統(tǒng)的最顯著影響就是降低了系統(tǒng)的帶寬,使得系統(tǒng)無法進(jìn)一步提高性能。
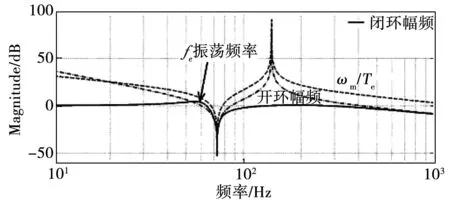
圖3 彈性系統(tǒng)幅頻特性Fig.3 Magnitude diagram of elastic system
令ωn= min(ω1,ω2),ζ對應(yīng)角頻率的阻尼。在速度閉環(huán)系統(tǒng)中,由于受到閉環(huán)控制作用的影響,NTF頻率大于0 dB的增益會(huì)被明顯抑制,所以此時(shí)的諧振主要是以接近ARF頻率的振蕩頻率fe在振動(dòng),而且該頻率振動(dòng)也會(huì)逐漸地趨于穩(wěn)定。連續(xù)閉環(huán)系統(tǒng)的振蕩頻率fe的關(guān)系為
(15)
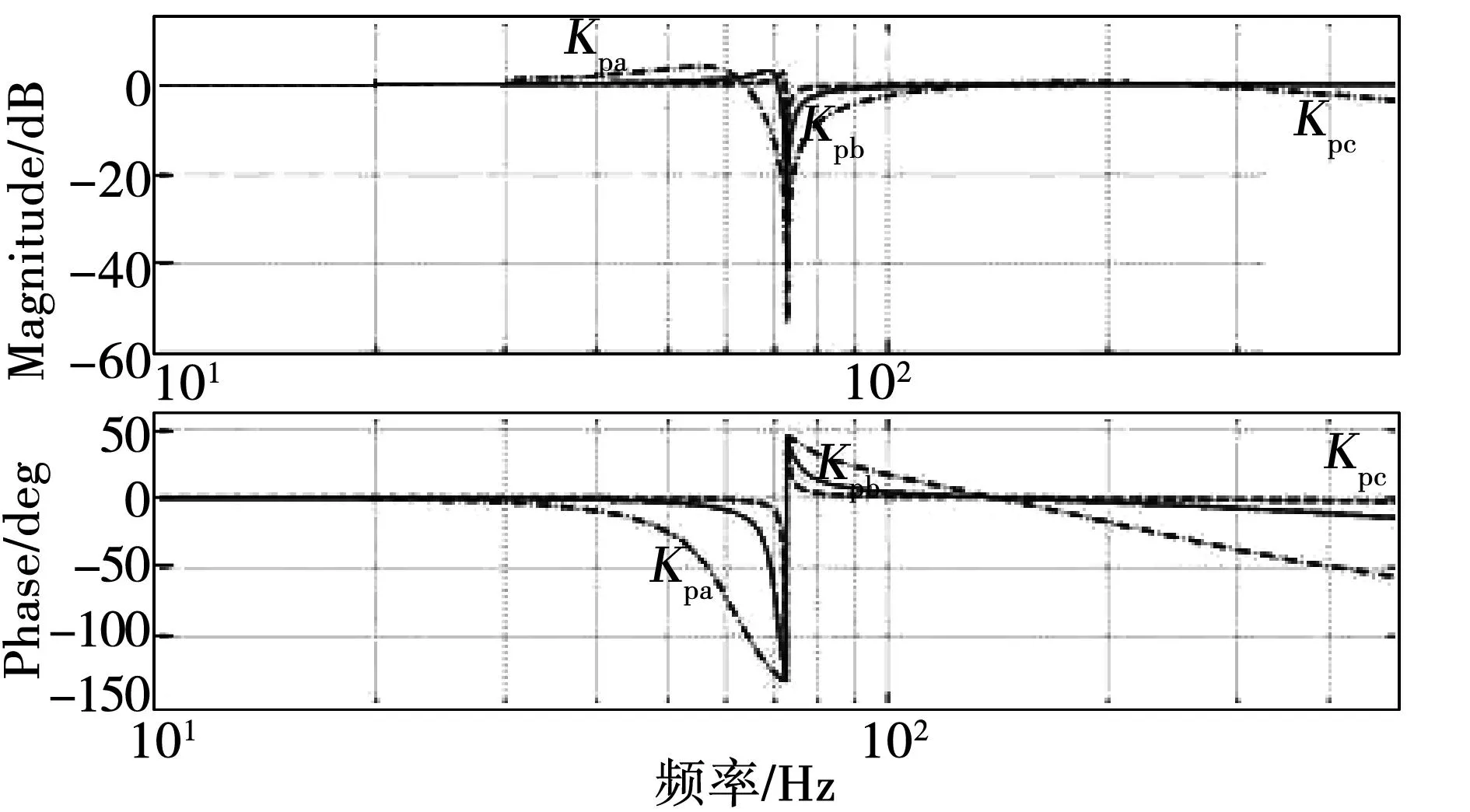
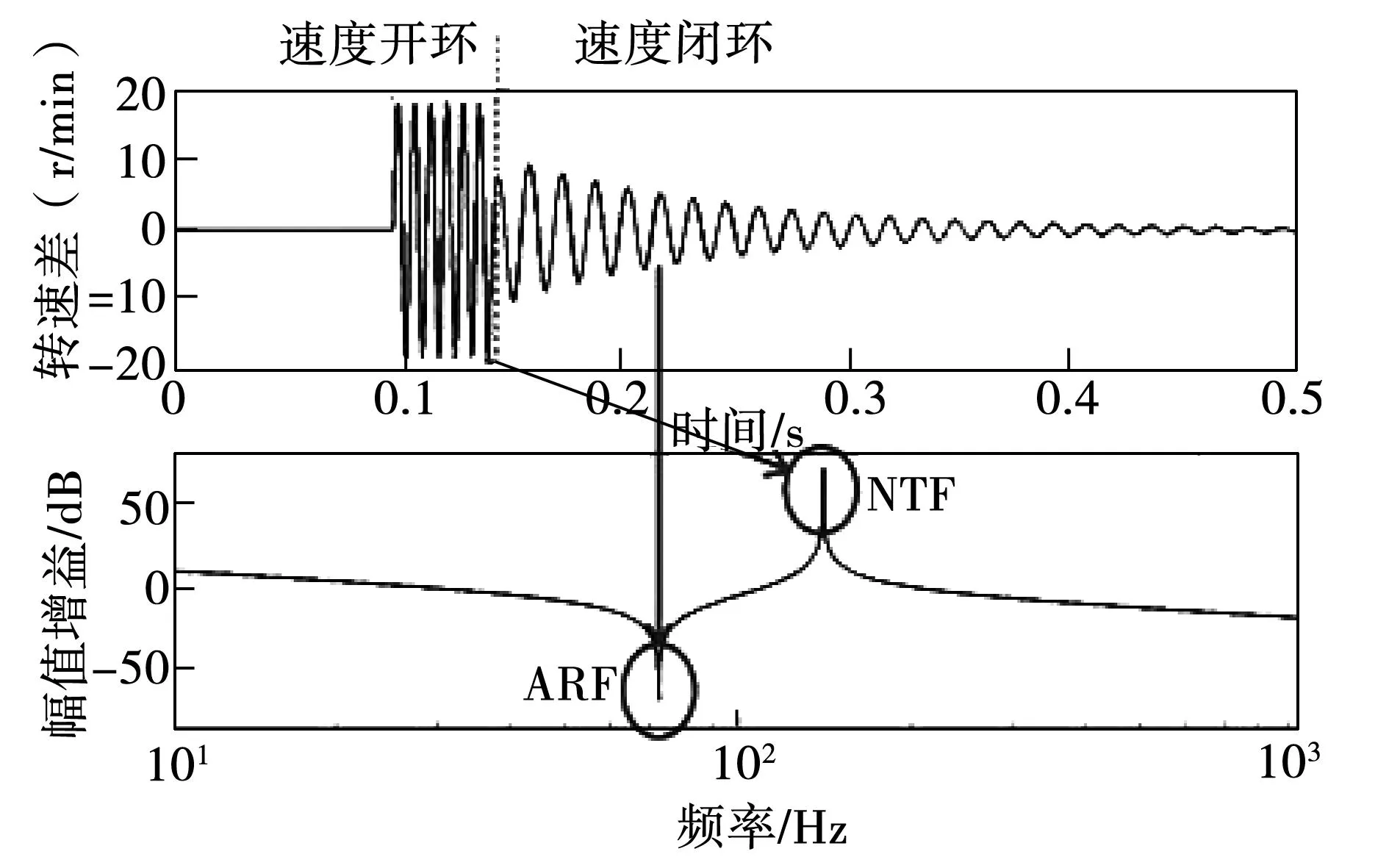
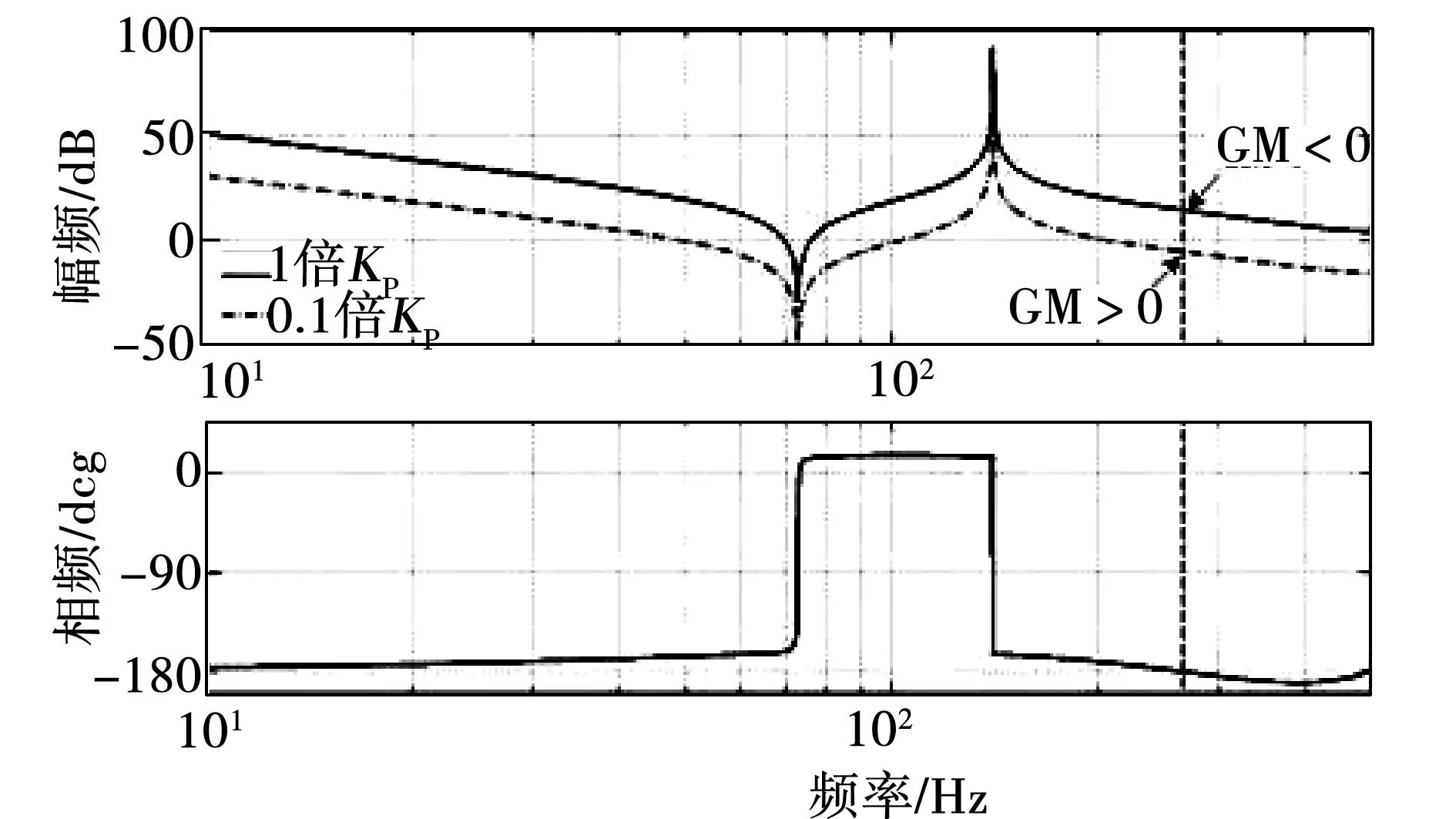
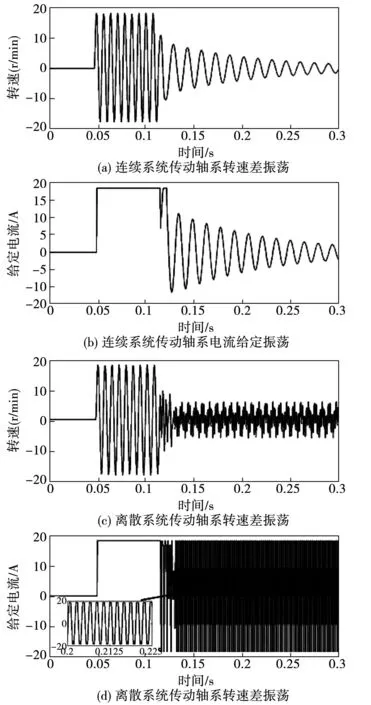
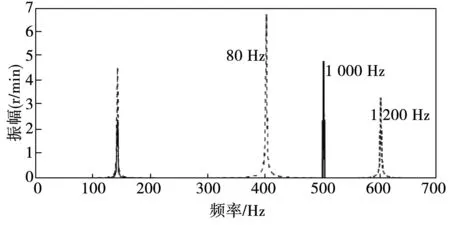
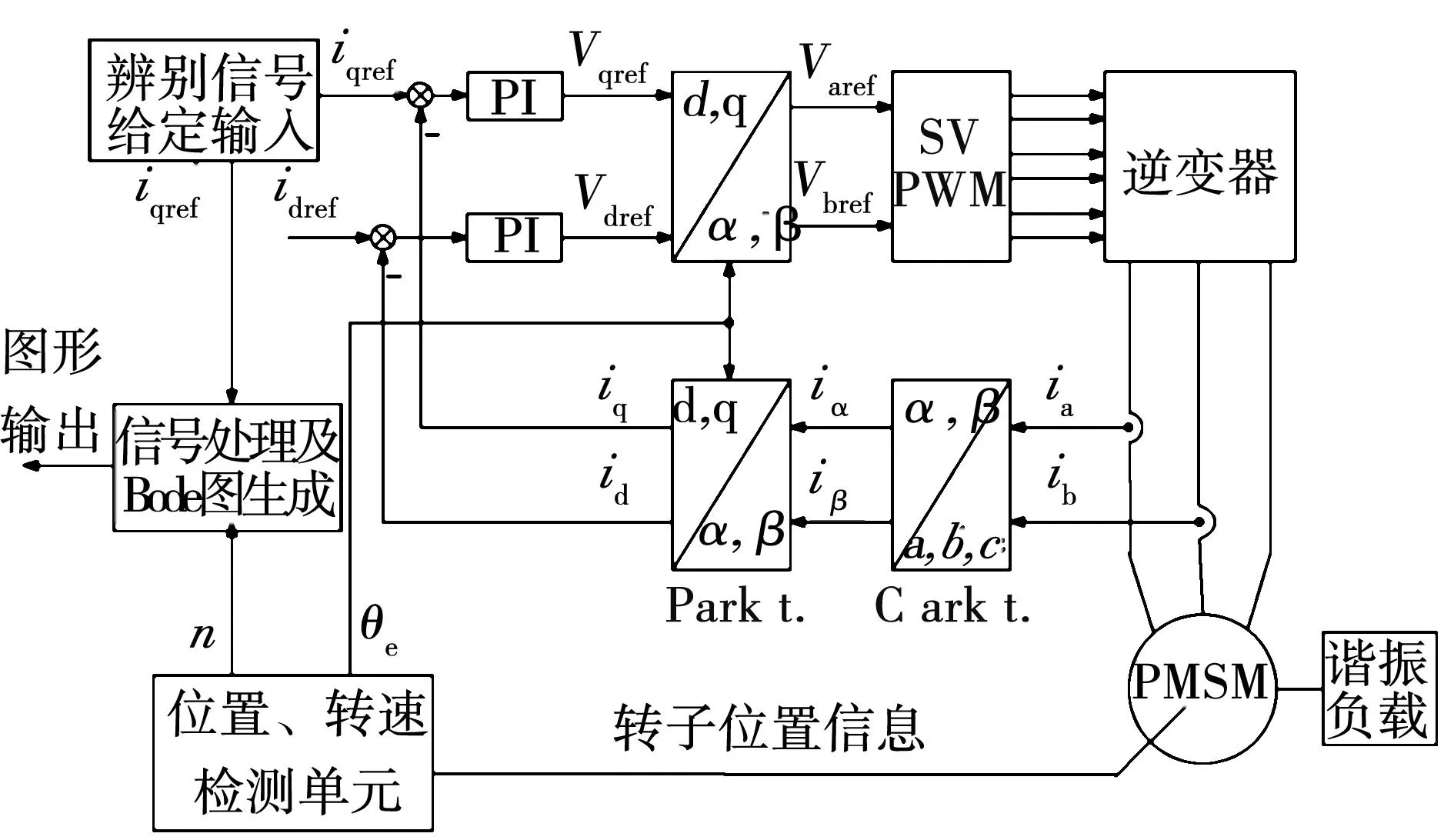
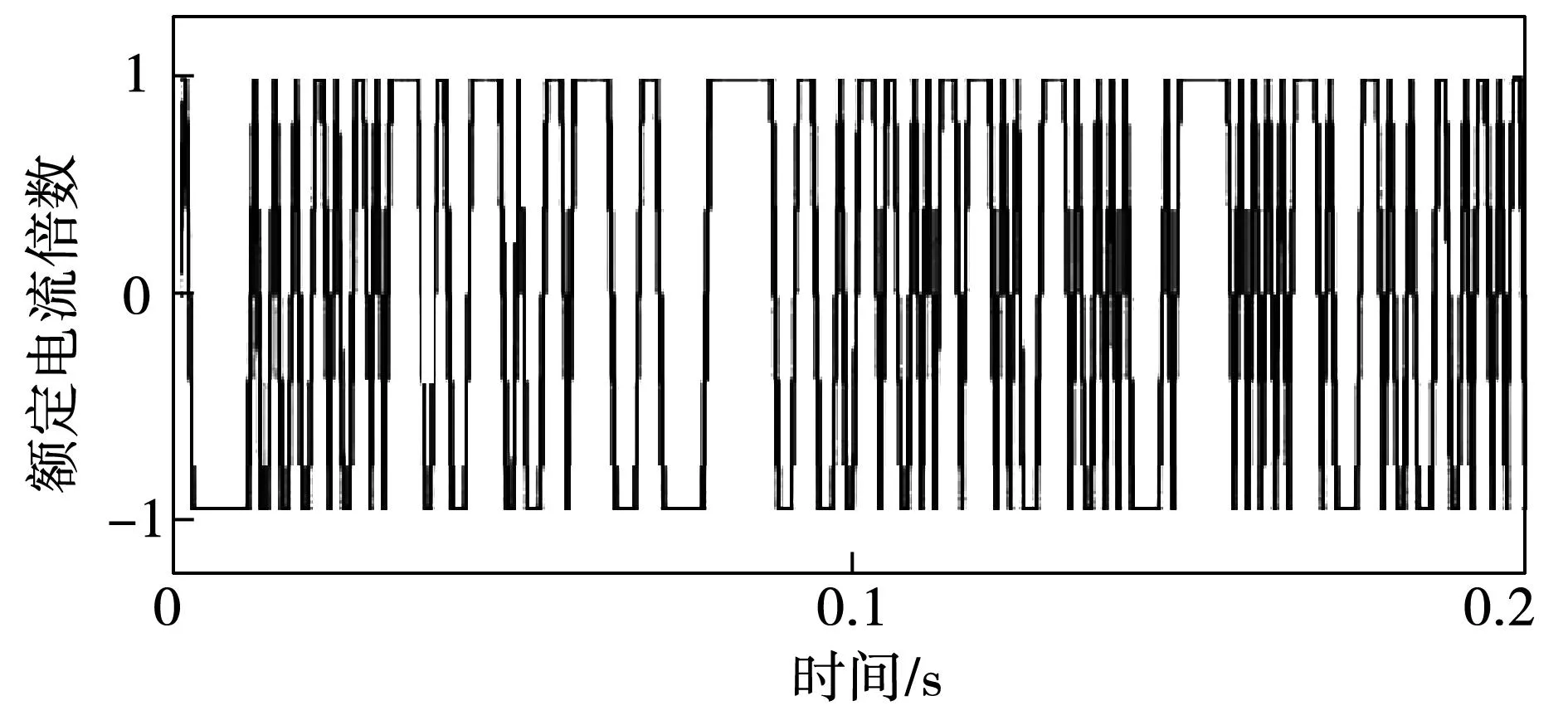
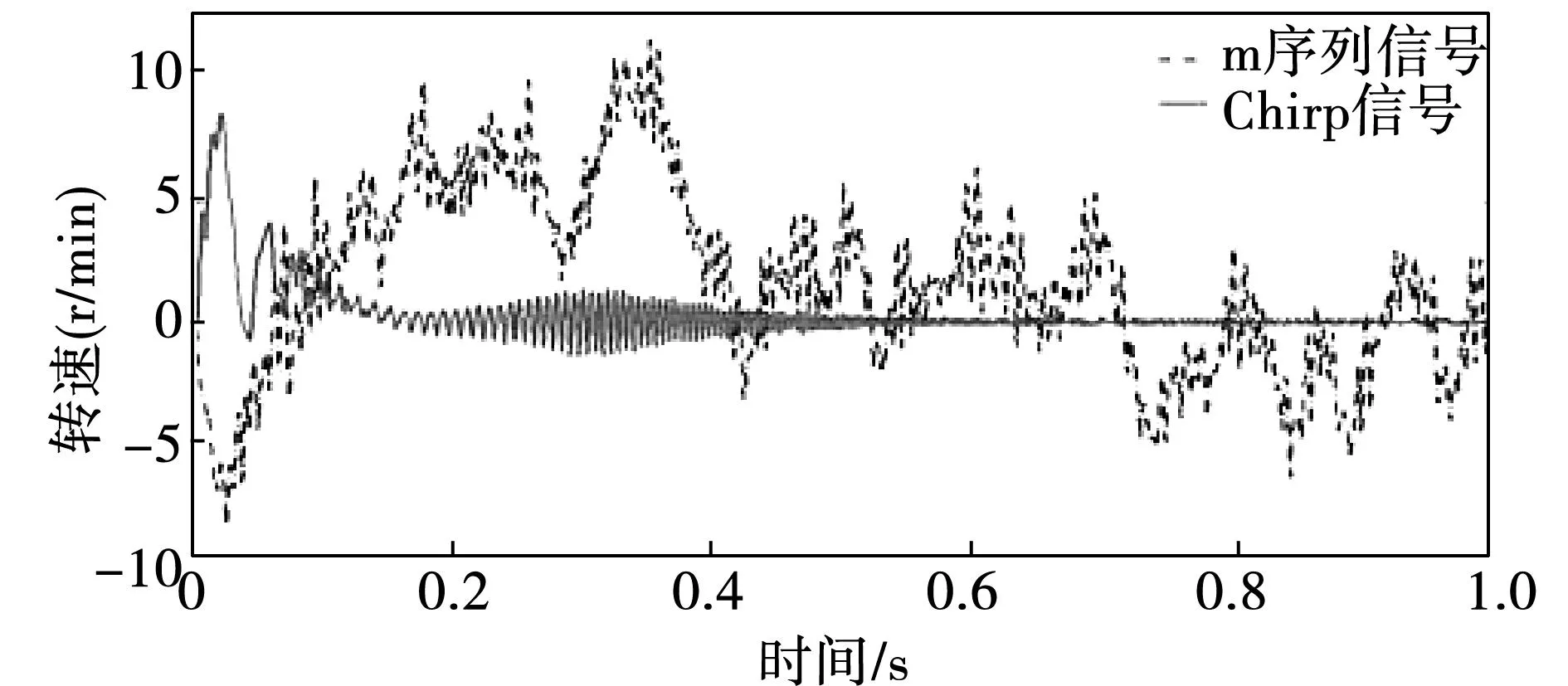
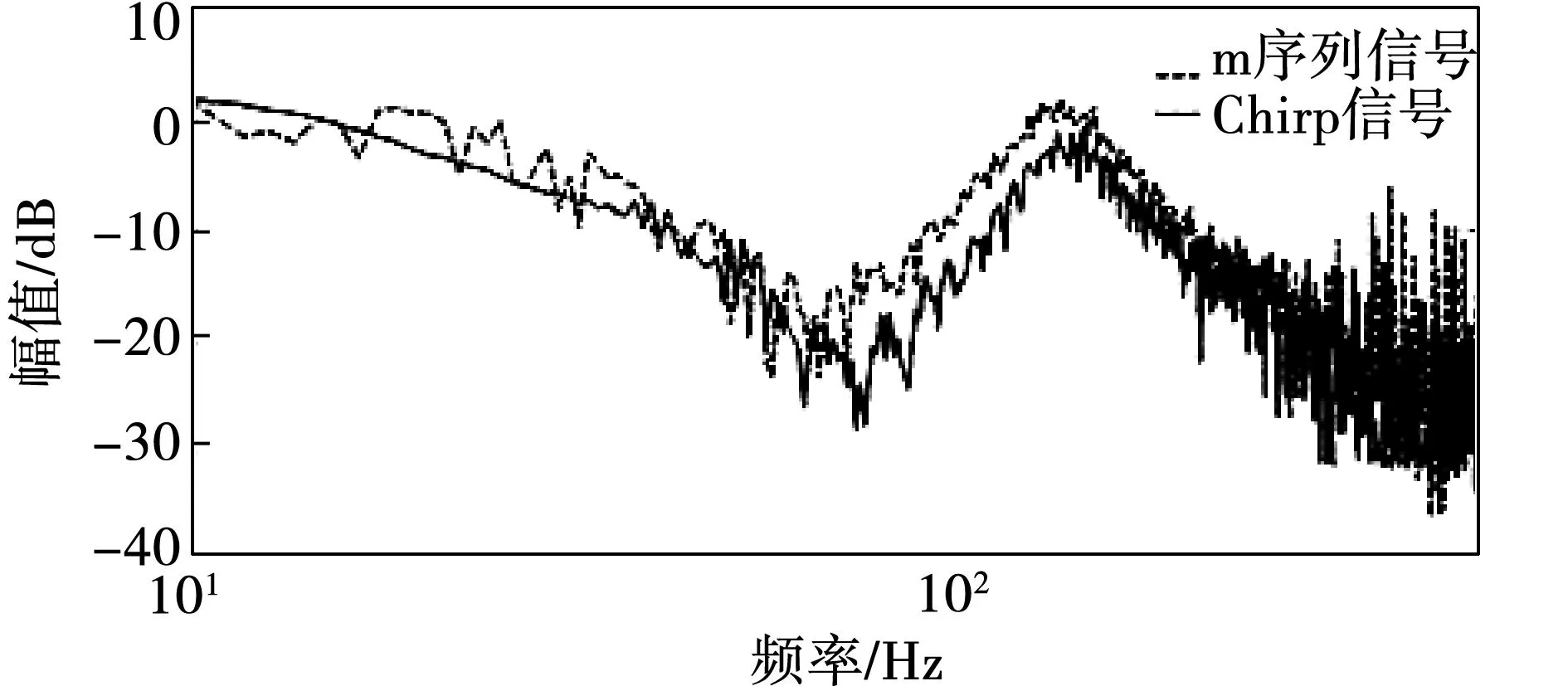
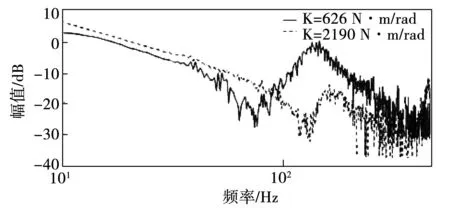
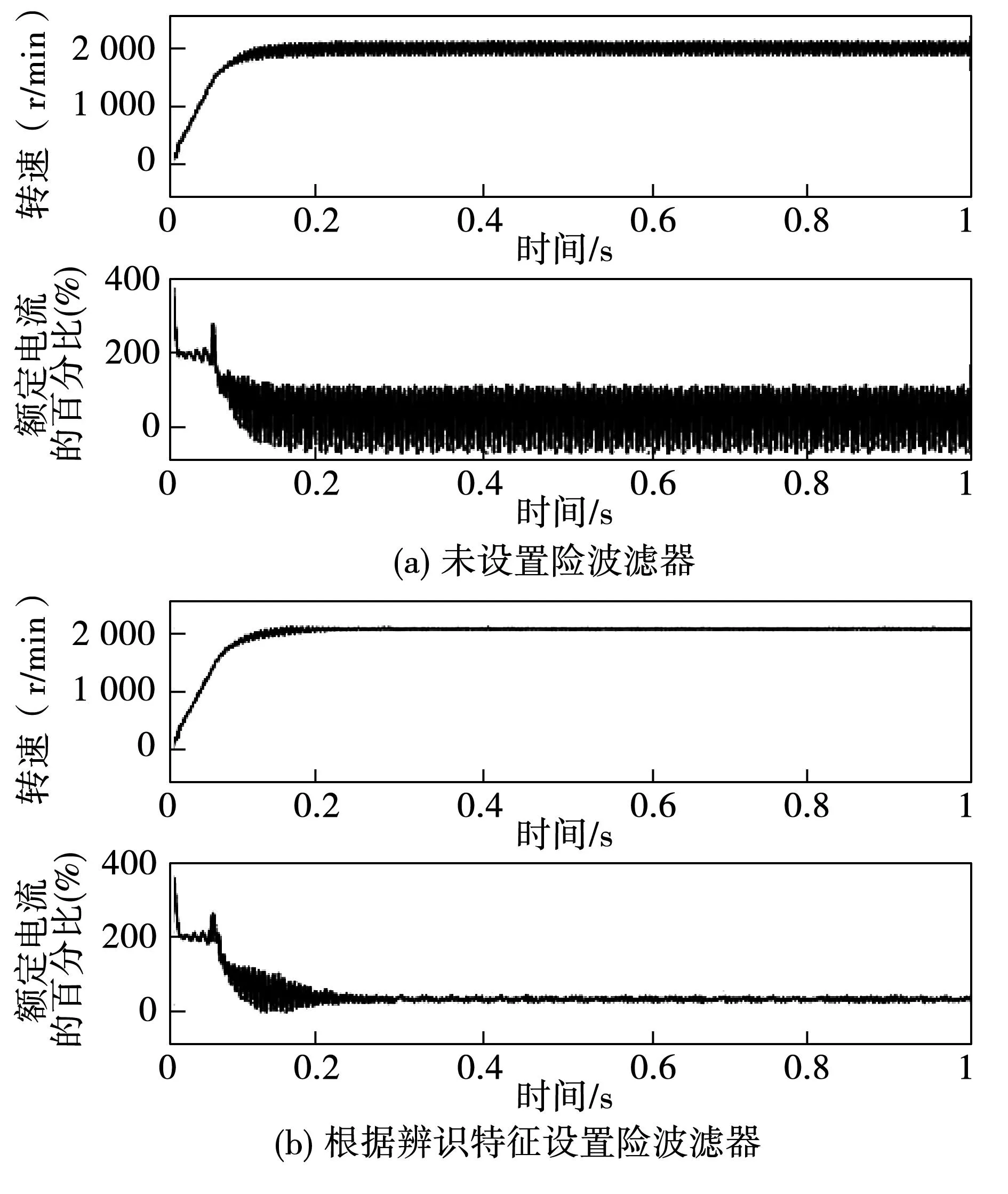
圖4為在不同Kp時(shí)閉環(huán)系統(tǒng)的Bode圖,其中Kpa 圖4 不同Kp的閉環(huán)系統(tǒng)Bode圖Fig.4 Bode diagram of closed-loop system with different Kp 對于過小Kp值的系統(tǒng),阻尼較大,fe會(huì)遠(yuǎn)離ARF頻率。隨著Kp的加大,阻尼減小,衰減效果減弱,ωn趨近于ωARF,振蕩頻率fe接近ARF頻率。對于大慣量的數(shù)控伺服來說,為了滿足動(dòng)態(tài)性能,Kp一般較大,所以在Kp較大的連續(xù)系統(tǒng)中,振蕩頻率fe可以近似為ARF諧振頻率。 如圖5所示為帶有速度輸出限幅的閉環(huán)系統(tǒng)中速度階躍響應(yīng)電機(jī)與負(fù)載間的轉(zhuǎn)速差振蕩。從圖5可以看出,振蕩頻率明顯分為兩段:當(dāng)速度調(diào)節(jié)器飽和,系統(tǒng)處于速度控制開環(huán)階段,此時(shí)電機(jī)和負(fù)載側(cè)都以NTF頻率振蕩;當(dāng)電機(jī)速度達(dá)到給定速度,速度調(diào)節(jié)器退飽和,進(jìn)入速度控制閉環(huán)階段。在對于大慣量系統(tǒng)控制器剛度隨之較大時(shí),該階段就能以ARF諧振頻率衰減振蕩,直至轉(zhuǎn)速達(dá)到給定。 圖5 扭轉(zhuǎn)振蕩的仿真結(jié)果Fig.5 Simulation result of torsional oscillation 從振動(dòng)的類型上看,NTF諧振受到激發(fā)后能保持自身特性持續(xù)振蕩,屬于自激振蕩;而ARF諧振由于受閉環(huán)阻尼的影響,最終會(huì)逐漸衰減,屬于自由振蕩。 1.3離散系統(tǒng)中的諧振 由于實(shí)際伺服驅(qū)動(dòng)系統(tǒng)均是數(shù)字化控制系統(tǒng),所以要重點(diǎn)考慮離散化對系統(tǒng)諧振現(xiàn)象的影響。離散化對系統(tǒng)的最直接影響就是改變了系統(tǒng)的相頻特性,降低了系統(tǒng)的穩(wěn)定裕度。除了相角裕度PM,穩(wěn)定性也可通過增益裕度GM來決定。增益裕度表達(dá)式 (16) 其中,A(fg)為穿越-π角度fg頻率處的幅值。 在采樣1 kHz的離散系統(tǒng)中,由于采樣原理,頻譜在500 Hz以后就沒有確定意義,剪切頻率可能無法獲得,而變Kp對相頻沒有影響,所以用GM來判斷穩(wěn)定性更方便。在速度開環(huán)情況下,速度Kp決定增益裕度。當(dāng)GM<0,閉環(huán)離散系統(tǒng)發(fā)散。圖6是兩種Kp情況下的速度開環(huán)Bode圖,連續(xù)與離散系統(tǒng)的系統(tǒng)參數(shù)一致。 當(dāng)Kp小于一定值時(shí),系統(tǒng)的增益裕度為正,此時(shí)系統(tǒng)具有與連續(xù)系統(tǒng)相同的性質(zhì)。這時(shí),速度控制器不會(huì)飽和,仍會(huì)在線性范圍內(nèi),離散系統(tǒng)的諧振情況近似與連續(xù)系統(tǒng)一致,逐漸衰減穩(wěn)定。 圖6 不同Kp的開環(huán)離散系統(tǒng)Bode圖Fig.6 Bode diagram of open-loop discrete system with different Kp 當(dāng)Kp增大使增益裕度小于零時(shí),變?yōu)榘l(fā)散系統(tǒng)。由于速度控制器的限幅作用使其基本處于飽和狀態(tài),振蕩形式發(fā)生了變化。圖7為Kp較大時(shí)同一參數(shù)下,連續(xù)系統(tǒng)與離散系統(tǒng)在速度給定3 000 r/min階躍的傳動(dòng)軸系振蕩對比。從圖中可以看出離散后的發(fā)散系統(tǒng)會(huì)在穩(wěn)態(tài)出現(xiàn)持續(xù)諧振。 穩(wěn)態(tài)諧振時(shí)控制器在正負(fù)飽和間變換,而飽和時(shí)的諧振頻率為NTF,所以非線性穩(wěn)態(tài)諧振中會(huì)包含NTF頻率。由于發(fā)散系統(tǒng)的穩(wěn)態(tài)振蕩是一種幅值變化最劇烈的振蕩,所以此時(shí)會(huì)引入fs/2的附加頻率分量(fs為采樣頻率)。在系統(tǒng)開環(huán)截止頻率大于附加頻率時(shí),系統(tǒng)就會(huì)在NTF頻率上附加這個(gè)諧振頻率。圖8為不同離散化頻率時(shí)的對轉(zhuǎn)速差的FFT分解。從圖中可以看出,不同采樣頻率下都會(huì)有NTF的諧振頻率存在,而且附加的頻率為fs/2。 在此情況下,速度控制器參數(shù)不再對諧振頻率值產(chǎn)生影響。系統(tǒng)處于電流給定均值近似為零的速度開環(huán)狀態(tài)。由于數(shù)據(jù)保持原理,實(shí)際系統(tǒng)在采樣后會(huì)有一個(gè)低通濾波器進(jìn)行濾波,所以在實(shí)際中的該情況下只體現(xiàn)NTF諧振頻率。 離散系統(tǒng)一旦由于穩(wěn)定裕度不滿足穩(wěn)定條件時(shí)系統(tǒng)就會(huì)發(fā)散,而受到控制器限幅的作用使得發(fā)散狀態(tài)受到限制,使得系統(tǒng)變成飽和非線性系統(tǒng)。該飽和非線性形成的穩(wěn)態(tài)振蕩同開環(huán)NTF振蕩一樣在激發(fā)后不受給定的影響可以持續(xù)振蕩。 2諧振特征辨識 實(shí)際伺服系統(tǒng)的高性能往往要求高控制剛度,Kp一般較大,通過對機(jī)械諧振特性的分析可以發(fā)現(xiàn),系統(tǒng)的諧振頻率只有ARF及NTF諧振兩種情況,而且以NTF諧振為主。由于被動(dòng)方式的諧振抑制是通過陷波濾波器對諧振頻率進(jìn)行濾波,若系統(tǒng)出現(xiàn)由于穩(wěn)定裕度不足而導(dǎo)致的穩(wěn)態(tài)持續(xù)振蕩時(shí),將陷波頻率設(shè)為NTF頻率;反之,沒有穩(wěn)態(tài)持續(xù)振蕩,則可認(rèn)為衰減振蕩,陷波頻率設(shè)為ARF頻率。 圖7 連續(xù)與離散系統(tǒng)的振蕩對比Fig.7 Comparison of oscillation between continuous and discrete system 研究通過離線方式獲取開環(huán)系統(tǒng)Bode圖來得到諧振特性。圖9為離線諧振特性辨識結(jié)構(gòu)框圖。信號的給定不宜過小,否則會(huì)對辨識精確度造成影響。將信號幅值變?yōu)橐槐额~定電流值輸入作為q軸給定輸入系統(tǒng)。 2.1辨識給定信號 基礎(chǔ)掃頻主要是提供頻率連續(xù)且周期性重復(fù)的信號,將不同頻率下的系統(tǒng)特性記錄下來,以此繪制頻率特性曲線。但操作繁瑣費(fèi)時(shí),還可能遺失特定頻率的細(xì)節(jié),對于諧振系統(tǒng)長時(shí)間測試甚至?xí)l(fā)機(jī)械損害,所以要研究快速辨識諧振特性的方法。 圖8 不同采樣頻率對諧振頻率成分的影響Fig.8 Effects on resonant frequency of different sampling frequency 圖9 離線諧振特性辨識的結(jié)構(gòu)框圖Fig.9 Structure block diagram of resonance characteristic identification in discrete system 快速系統(tǒng)辨識中給定信號的最主要特點(diǎn)是要能充分包含所有的頻率成分,頻域上有寬頻譜,時(shí)域上信號變化劇烈呈現(xiàn)非周期性。符合該特點(diǎn)的信號最典型的就是白噪聲信號,但由于白噪聲不易在實(shí)際的數(shù)字系統(tǒng)中實(shí)現(xiàn)且噪聲方差較大,所以需要通過其他符合辨識特點(diǎn)的信號來代替。 2.1.1偽隨機(jī)序列信號 偽隨機(jī)序列碼就能充分體現(xiàn)辨識信號特點(diǎn)。用到的偽隨機(jī)序列碼為m序列碼,m序列又稱最大線性移位寄存器序列,它的產(chǎn)生是由反饋移位寄存器生成的。序列x1x2…xpxp+1…,各元素間存在式(17)的關(guān)系: xi=a1xi-1⊕a2xi-2⊕…⊕apxi-p,i=p+1,p+2,… (17) 其中ai取0或1,⊕表示求和模2運(yùn)算。 二進(jìn)制m序列具有良好的偽隨機(jī)特性,有以下幾個(gè)特點(diǎn): 1)平衡性:二進(jìn)制m序列的一個(gè)周期中,1與0的數(shù)目相差1。 2)具有二值自相關(guān)函數(shù)。 對于一個(gè)周期為T=2n-1的±1電平m序列,n為m序列的階數(shù),其自相關(guān)函數(shù)為 (18) 其中u(k)為序列信號電平值,τ為整數(shù)。 這樣得到的自相關(guān)特性為:當(dāng)τ為0和T的整數(shù)倍時(shí)R(τ)=T,τ取其他值時(shí)為弱相關(guān)R(τ)= -1,當(dāng)周期T很大時(shí),m序列的自相關(guān)函數(shù)與白噪聲類似,這樣就有很尖銳的自相關(guān)特性,這就是可以選擇基于m序列的偽隨機(jī)序列來代替白噪聲做電流給定信號的原因。 二位式m序列的一個(gè)周期中1的個(gè)數(shù)比-1的個(gè)數(shù)只多一個(gè),序列的平均值很小,在實(shí)際應(yīng)用中避免了開環(huán)下的低速累積導(dǎo)致的速度過大問題。圖10序列作為q軸電流給定的波形圖。 圖10 偽隨機(jī)序列信號波形圖Fig.10 Waveform graph of Pseudo random sequence signal 2.1.2Chirp信號 除了偽隨機(jī)序列信號以外,Chirp信號也具有寬頻帶及恒定頻率分量值。Chirp信號為調(diào)頻脈沖掃頻信號,是一種連續(xù)的余弦掃頻信號。在頻率特性獲取中,用的是如下 u(t)=Acos(2π(βt2+f0t))。 (19) 其中A為掃頻幅值,β為頻率變化速率,f0為初始頻率。由式(19)可以看出Chirp信號是隨時(shí)間線性變化的余弦函數(shù),其作為q軸電流給定的波形圖見圖11。 通過對Chirp信號的FFT分解可以發(fā)現(xiàn),該信號也有類似白噪聲的統(tǒng)一的頻率分量,也可以產(chǎn)生寬范圍的頻帶。Chirp信號頻帶有截止范圍,取決于信號的高頻中止頻率,頻率越高,頻帶越寬。 以上兩種辨識信號都具有快速性和準(zhǔn)確性,在采樣1 kHz的離散系統(tǒng)中,只需1 s即可完成信號給定。 圖11 Chirp波形圖Fig.11 Waveform graph of Chirp signal 2.2數(shù)據(jù)處理 由于給定x(t)引起的激勵(lì)y(t),它的傅里葉變換y(jω)等于系統(tǒng)傳遞函數(shù)G(jω)和x(jω)的乘積,即 y(jω)=G(jω)·x(jω)。 (20) 通過FFT運(yùn)算可以得到給定信號及激勵(lì)信號的相同頻率ωr的同相正交分量,為 (21) 通過計(jì)算每個(gè)頻率處的給定信號與激勵(lì)信號的幅值比和相位差就可以得到被測系統(tǒng)的幅頻和相頻特性。系統(tǒng)的幅頻及相頻特性可按下式(22)計(jì)算。按上述方式就可以繪制出系統(tǒng)的頻率特性Bode圖。 (22) 3仿真與實(shí)驗(yàn) 3.1仿真結(jié)果 在Matlab/SIMULINK中進(jìn)行仿真驗(yàn)證,仿真中用到的永磁同步伺服系統(tǒng)參數(shù)如表1。 在此系統(tǒng)參數(shù)下可以算出ARF=72 Hz,NTF=140 Hz。圖12為m序列信號及Chirp信號兩種給定方式的對比圖。通過仿真對比圖可以發(fā)現(xiàn),兩種信號給定都能獲得開環(huán)系統(tǒng)的頻率特性(本文只列出幅頻特性),但Chirp信號得到的結(jié)果要優(yōu)于m序列信號,噪聲方差含量較小。 3.2實(shí)驗(yàn)結(jié)果 圖13為雙慣量系統(tǒng)實(shí)物圖,左右兩側(cè)電機(jī)可互為電機(jī)-負(fù)載結(jié)構(gòu),中間以彈性軸聯(lián)接,并可通過附加中間的慣量盤達(dá)到改變負(fù)載慣量的目的。實(shí)物系統(tǒng)參數(shù)與仿真一致。 表1 永磁同步伺服系統(tǒng)主要參數(shù) 圖12 兩種信號FFT法仿真結(jié)果Fig.12 Simulation results between two signals with FFT method 圖13 雙慣量系統(tǒng)實(shí)物圖Fig.13 Realtest bench of 2-mass system 在實(shí)物平臺(tái)上用以上方法獲取系統(tǒng)機(jī)械諧振特性。兩種信號給定與速度檢測采樣的頻率都為1 kHz,信號長度為1 024,所以給定時(shí)長1 s,加上FFT運(yùn)算共計(jì)1.07 s即可得到諧振特性Bode圖。圖14為兩種方法的電機(jī)側(cè)轉(zhuǎn)速波形。兩種方法都具有運(yùn)行時(shí)間短、沒有轉(zhuǎn)速累加的優(yōu)點(diǎn),均可以避免長時(shí)間運(yùn)行和高轉(zhuǎn)速時(shí)諧振對系統(tǒng)的機(jī)械損害。 圖15為兩種信號用FFT直接計(jì)算法的實(shí)物對比結(jié)果圖。兩種方法均能得到諧振特性,實(shí)驗(yàn)證明其在諧振特性獲取上的可行性及實(shí)用性。 圖14 兩種方法的電機(jī)轉(zhuǎn)速波形Fig.14 Waveform of motor speed between two methods 圖15 兩種信號FFT法實(shí)物結(jié)果Fig.15 Real results between two signals with FFT method 圖16是在不改變控制器參數(shù)情況下,改變彈性軸系數(shù)并增加電機(jī)慣量的對比圖,用的是Chirp信號法。其中軸剛性增加,彈性系數(shù)為2 190 N·m/rad,電機(jī)慣量為5.9×10-3N·m2,負(fù)載慣量不變?yōu)?×10-3N·m2,進(jìn)而算出的理論ARF為136 Hz,NTF為167 Hz。可以看出不同參數(shù)不會(huì)對辨識造成影響,該快速辨識方法具有很好的精確度。 圖16 改變軸剛度系數(shù)實(shí)物結(jié)果Fig.16 Real results of changing stiffness coefficient 由于離散系統(tǒng)出現(xiàn)持續(xù)振蕩現(xiàn)象,證明穩(wěn)定裕度不足,根據(jù)前面的分析諧振頻率為NTF頻率。通過幅頻特性圖可以讀出當(dāng)前NTF諧振頻率,依據(jù)該頻率配置陷波濾波器的陷波頻率。將陷波濾波器設(shè)置在速度控制器輸出后進(jìn)行濾波處理,可以得到濾波前后的轉(zhuǎn)速階躍對比圖,見圖17。實(shí)驗(yàn)證明根據(jù)辨識后的諧振特征可以確定陷波濾波器參數(shù),達(dá)到抑制機(jī)械諧振的目的。 圖17 根據(jù)辨識特征投入陷波濾波器前后實(shí)物對比Fig.17 Comparison before and after setting notch filter according to identification of characteristics 5結(jié)論 為了能離線獲取機(jī)械諧振特性,本文分析了連續(xù)及離散系統(tǒng)的諧振特性并提出了實(shí)用的諧振特性辨識方法。得到如下結(jié)論: 1)閉環(huán)系統(tǒng)的帶寬受到彈性系統(tǒng)的限制,加大連續(xù)系統(tǒng)剛度只會(huì)使系統(tǒng)帶寬及諧振頻率趨近ARF諧振頻率。所以在大慣量伺服系統(tǒng)中,由于控制器剛度較高,可以將諧振頻率近似為ARF頻率。 2)由于剛度的增加可能會(huì)使離散閉環(huán)系統(tǒng)的穩(wěn)定裕度為負(fù),進(jìn)入發(fā)散狀態(tài)。由于速度限幅的作用,使系統(tǒng)進(jìn)入非線性振蕩狀態(tài)。此時(shí)振蕩頻率為NTF頻率疊加二分之一采樣頻率,經(jīng)過采樣濾波的實(shí)際系統(tǒng)體現(xiàn)的就為NTF諧振頻率。 3)通過偽隨機(jī)序列信號或Chirp信號的FFT直接運(yùn)算法可以得到諧振特性的Bode圖。辨識方法具有快速性,以及小轉(zhuǎn)動(dòng)量的特點(diǎn),可以降低對諧振系統(tǒng)的機(jī)械損害,提高測試的安全性。 參 考 文 獻(xiàn): [1]馬小亮.驅(qū)動(dòng)彈性負(fù)載的調(diào)速傳動(dòng)[J].電氣傳動(dòng),2008,38(7):3-7. MA Xiaoliang .Variable speed drives with elastic loads[J].Electric Drive,2008,38(7): 3-7. [2]G Zhang.Speed control of two-interia system by PI/PID control [J].IEEE Transactions on Industrial Electronics,2000,47(3):603-609. [3]S KATSURA,K OHNISHI.Force servoing by flexible manipulator based on resonance ratio control[J].IEEE Transactions on Industrial Electronics,2007,54(1):539-547. [4]Y HORI,H SAWADA,Y CHUN.Slow resonance ratio control for vibration suppression and disturbance rejection in torsional system[J].IEEE Transactions on Industrial Electronics,1999,46(1):162-168. [5]K SZABAT,T ORLOWSKA-KOWALSKA.Vibration suppression in a two-mass drive system using PI speed controller and additional feedbacks-comparative study[J].IEEE Transactions on Industrial Electronics,2007, 54(2):1193-1206. [6]G.Shahgholian,P.Shafaghi,M.Zinali,S.Moalem.State space analysis and control design of two-mass resonant system[C]//2009 Second International Conference on Computer and Electrical Engineering,2009:97-101. [7]T ORLOWSKA-KOWALSKA,M KAMINSKI.Effectiveness of saliency-based methods in optimization of neural state estimators of the drive system with elastic couplings[J].IEEE Transactions on Industrial Electronics,2009,56(10):4043-4051. [8]A.Hace,K.Jezernik,A.abanovic.SMC with disturbance observer for a linear belt drive[J].IEEE Transactions on Industrial Electronics,2007, 54(6):3402-3412. [9]K.Peter,I.Sch?ling,B Orlik.Robust output-feedback H∞-control with a nonlinear observer for a two-mass system[J].IEEE Transactions on Industry Applications,2003,39(3):637-644. [10]M CYCHOWSKI,K SZABAT,T ORLOWSKA- KOWALSKA.Constrained model predictive control of the drive system with mechanical elasticity[J].IEEE Transactions on Industry Applications,2009,56(6):1963-1973. [11]P J SERKIES,K SZABAT.Application of the MPC to the position control of the two-mass drive system[J].IEEE Transactions on Industrial Electronics,2013,60(9):3679-3688. [12]G ELLIS,R D LORENZ.Resonant load control methods for industrial servo drives[C]//Industry Applications Conference,2000,3:1438-1445. [13]Wei-Chih Hsu,Chien-Liang Lai,Pau-Lo Hsu.A novel design for vibration suppression for lightly-damped servo control systems[C]//Proceedings of 2011 8th Asian Control Conference (ASCC),2011,251-256. [14]P SCHMIDT,T REHM.Notch filter tuning for resonant frequency reduction in dual inertia systems[C]//IAS Annual Meeting (IEEE Industry Applications Conference),1999,3:1730-1734. [15]Lennart Harnefors.Implementation of resonant controllers and filters in fixed-point arithmetic[J] .IEEE Transactions on Industrial Electronics,2009,56(4):1273-1281. [16]C I KANG,C H KIM.An adaptive notch filter for suppressing mechanical resonance in high track density disk drives[J].Microsystem Technologies,2005,11:638-652. [17]S KUMAGAI,K OHISHI,T MIYAZAKI.High performance robot motion control based on zero phase error notch filter and D-PD control[C]//Proceedings of 2009 IEEE International Conference on Mechatronics,2009,1-6. [18]JENNISONB K.Performance of a linear frequency modulated signal detection algorithm[C]// The Record of the IEEE 2000 International,2000: 447-450. [19]VILLWOCK S,PACAS M.Application of the welch-method for the identification of two- and three-mass-system[J].IEEE Transactions on Industrial Electronics,2008:457-466. [20]楊明,胡浩,徐殿國.永磁交流伺服系統(tǒng)機(jī)械諧振成因及其抑制[J].電機(jī)與控制學(xué)報(bào),2012,16(1):79-84. YANG Ming,HU Hao,XU Dianguo.Cause and suppression of mechanical resonance in PMSM servo system[J].Electric Machines and Control,2012,16(1):79-84. (編輯:劉素菊) Analysis of mechanical resonance mechanism and fast identification of resonance characteristic for 2-mass system with elastic load YANG Ming,HAO liang,XU Dian-guo (Department of Electrical Engineering,Harbin Institute of Technology,Harbin 150001,China) Abstract:Mechanism of mechanical resonance in two-mass system with elastic transmission was analyzed.First of all,the quantitative relation between magnitude characteristic of open/closed-loop continuous system and natural resonant characteristic was contrasted.According to the relation,the resonant mode was confirmed.In discrete system,the effect of controller’s rigidity on oscillation in closed-loop discrete system was analyzed.The resonant frequency at the state of sustained oscillation in discrete system is NTF.Through the analysis of resonance mechanism,the natural resonant characteristic is important to eliminate resonance.Two methods of fast acquirement of resonant characteristic were discussed based on Pseudo random sequence and Chirp signals.According to the identified frequency,the parameter of notch filter was determined.The results of simulation and experiment demonstrate the accuracy of this method and the suppression effect based on this method. Keywords:servo system; mechanical resonance; identification of resonance-characteristic; Pseudo random sequence; Chirp signal 中圖分類號:TM 921 文獻(xiàn)標(biāo)志碼:A 文章編號:1007-449X(2016)04-0112-09 DOI:10.15938/j.emc.2016.04.016 通訊作者:楊明 作者簡介:楊明(1978—),男,博士,副教授,博士生導(dǎo)師,研究方向?yàn)橛来沤涣魉欧到y(tǒng);徐殿國(1960—),男,博士,教授,博士生導(dǎo)師,研究方向?yàn)殡娏﹄娮蛹夹g(shù),交流電機(jī)驅(qū)動(dòng)。 基金項(xiàng)目:國家自然科學(xué)基金(61273147) 收稿日期:2014-03-30 郝亮(1989—),男,碩士,研究方向?yàn)樗欧?qū)動(dòng)控制;