基于Android的無線遙控汽車的設計與優化
2016-05-14 13:09:56張超
科技創新與應用 2016年6期
張超
摘 要:基于Android平臺的遠程遙控小車,可以使用智能手機通過藍牙(或wifi)發出指令。該車可以躲避障礙物,實時視頻傳輸,可用于在發生自然災害時執行搜索任務。經過相關參數的測試,實驗表明該智能小車性能穩定、操控性好,視頻傳輸穩定。通過對各部件電流消耗的分析,提出了優化方案。
關鍵詞:藍牙;wifi;遙控小車;Android設備
1 概述
隨著手機移動技術迅速發展,智能手機的功能越來越強大,從單一通話和收發短信,發展到可進行移動搜索、全球定位導航、手機電視、實時視頻通信等其它強大功能。Android是一種以linux為基礎的開源操作系統,基于此平臺的手機應用滲透到生活的方方面面。基于Android平臺的無線遙控汽車,通過藍牙(或wifi)發出指令。該車可以躲避障礙物,實時視頻傳輸,可用于在發生自然災害時執行搜索任務,具有一定的實際意義。
2 系統概述
該系統是由一個遙控小車單元和一個運行在Android智能手機的應用程序組成。
總體方案設計:
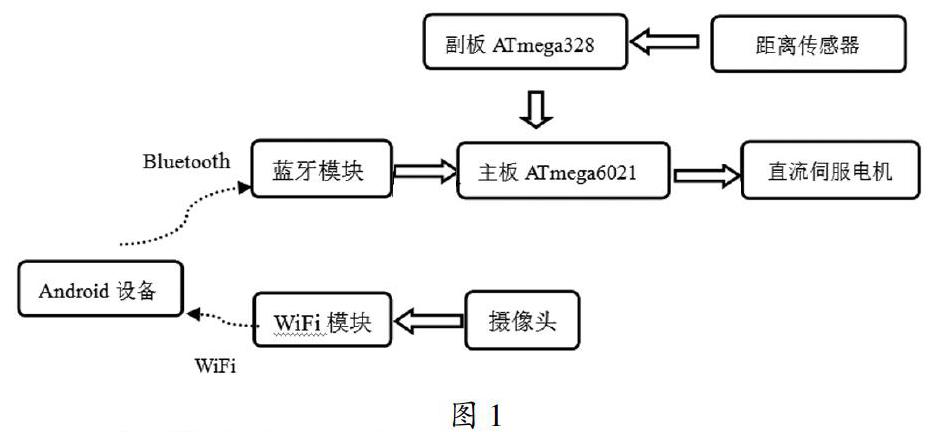
總體硬件框圖如圖1所示。
主板采用Arduino公司的Mega開發板,它是一個開源的單板機控制器,采用了基于開放源代碼的軟硬件平臺,構建于開放源代碼 simple I/O 接口版,并且具有使用類似Java,C 語言的Processing/Wiring開發環境。Arduino Mega是一塊以ATmega2560為核心的微控制器開發板,提供54個數字輸入/輸出引腳(其中6可以作為PWM輸出)8個模擬輸入,2個UART(硬件串口),一個16 MHz的晶體振蕩器,一個USB連接,輸入電壓6-12V 。主板產生1 前進/后退,左/右脈沖,通過直流伺服電機控制小車運行。
副板采用Arduino 公司的UNO板,微處理器是ATmega328,具有14路數字輸入/輸出口(其中6路可作為PWM輸出),6路模擬輸入,一個16MHz晶體振蕩器,一個USB口,一個電源插座,一個ICSP header和一個復位按鈕。副板連接一個距離傳感器,距離傳感器提供2-400厘米的非接觸式測量功能,精度可達到3毫米。
一個VGA攝像頭連接到路由器模塊,該裝置安裝在主控板后面。由攝像頭拍攝的視頻輸入到路由器通過wifi連接到Android設備,該視頻實時顯示在Android應用程序。
3 下位機軟件設計
主程序流程:
本系統的軟件完成以下功能:
(1)系統初始化:包括I/O口工作模式、串口、中斷、PWM的初始化,同步手機應用程序等。
(2)接受上位機android設備的控制命令。
(3)控制電機的運轉方向和速度。
副板上安裝有距離傳感器,ATmega 328微處理器通過計算距離傳感器發出脈沖和接受信號之間的間隔時間來確定與障礙物的距離,如果此距離小于20厘米,將產生中斷,中斷命令將被發送到主板的atmega2560微處理器上,主板將關閉伺服電機,避免可能出現的碰撞。如果計算出的距離大于20厘米,不產生中斷,小車繼續前進。
4 基于Android智能手機應用程序開發
4.1 Android系統架構
Android系統架構由5部分組成,分別是:Linux Kernel、Android Runtime、Libraries、Application Framework、Applications。
4.2 方向控制
首先我們創建一個傳感器管理器和一個傳感器監聽器,管理器用來管理傳感器以及創建各種各樣的傳感器,監聽器用來監視傳感器的變化并且進行相應的操作
private SensorManager sensorManager;private MySensorEventListener mySensorEventListener;
mySensorEventListener= new MySensorEventListener();
這個監聽器當然是我們自己定義的,在方向感應器感應到手機方向有變化的時候,我們可以采取相應的操作。
private final class MySensorEventListener implements SensorEventListener{
public void onSensorChanged(SensorEvent event) {
if(event.sensor.getType()==Sensor.TYPE_ORIENTATION){
float x = event.values[SensorManager.DATA_X];
float y = event.values[SensorManager.DATA_Y];
float z = event.values[SensorManager.DATA_Z];
x表示手機指向的方位,0表示北,90表示東,180表示南,270表示西
Y表示沿x軸的傾斜度,0表示水平,90表示頭向上垂直,180表示面向下水平,270表示頭向下垂直。
Z表示沿y軸的滾動角度,0表示水平,90表示右側向上垂直,-90表示左側向上垂直。
應用程序首先調用方向傳感器,獲取手機和一個通過Android傳感器管理器定義的默認坐標之間的角度信息,然后應用程序根據預定義的閾值將方向數據轉換為執行命令。
5 系統特性和實驗系統
經測試遙控小車的最大速度約為30厘米/秒,可以攜帶多達450克負荷。在開放空間本單元和Android設備之間通過藍牙或Wi-Fi通信的最大范圍為10米和20米。經測量,當設置在20厘米檢測距離時,本單元與障礙物之間自主停車距離在2厘米至7厘米。小車是由兩個9伏電池供電,經測量在滿負荷條件下每個電池的最大消耗電流約0.73A
6 結論和改進
基于Android平臺的無線遙控小車,可以通過Android設備(如智能手機或平板電腦)無線控制。該系統具有良好的操控性和實用性,可以通過狹小的空間執行搜索、探查任務。電流的測量結果表明,滿負荷下系統的功率消耗是比較高的。然而,通過數據分析我們了解哪些組件消耗大部分的能量,這為我們進一步優化設計提供了依據。
(1)計劃修改Android應用程序實現自主控制。例如,當小車前面沒有障礙物的時候,我們通過Android應用程序將關閉距離傳感器,這樣可以減少電量消耗。
(2)電流消耗試驗還表明,對于執行連續工作的小車,電量消耗還是比較大的,由于該小車可以攜帶更多的負載,因此可以安裝更大能量的電池組。
(3)替換更強大和低功耗的單片機以增加處理能力,并將進一步降低功耗。
參考文獻
[1]李寧.Android開發權威指南[M].北京:人民郵電出版社,2011.
[2]陳德益.基于嵌入式單片機的電機控制系統設計[J].計算機仿真,2010,27(1):359-362.
[3]林志翔.新型多功能智能小車的設計與應用[J].現代電子技術,2011,34(6):134-136.
