SRTM數字高程模型在合成視景技術中的應用
2016-05-14 11:13:49范力維張錦賡王麗君
海峽科技與產業 2016年7期
范力維 張錦賡 王麗君


摘 要:本文對SRTM數字高程模型在合成視景中應用的關鍵技術進行了研究,采用雙線性插值法對地形數據重采樣,為了提高地形繪制速度,構建了高程數據及紋理數據的金字塔模型,最后,論述了地形瓦片數據的調度方法。
關鍵詞:合成視景;SRTM;DEM;三維地形可視化
0 引言
合成視景技術是一項新興的飛機駕駛艙顯示技術,其基本原理是利用機載地形數據庫中存儲的地形數據,根據飛機的精確導航定位信息,通過計算機圖形技術,生成飛機外部環境的三維虛擬視景。國外多家航電設備公司都推出了具有合成視景功能的駕駛艙顯示器產品,這些產品除了具有傳統主飛行顯示器的顯示內容外,還可以實時地為飛行員顯示飛機外部環境的三維地形、障礙物、機場跑道等信息,使飛行員能夠在低能見度及陌生的地形條件下,獲得近似目視飛行所需的信息,提供了更先進的環境感知能力,從而提升了飛行安全性。
SRTM(Shuttle Radar Topography Mission)地形數據是由美國航空航天局(NASA)、美國國家圖像測繪局(NIMA)以及德國與意大利航天機構共同合作完成,覆蓋了全球表面從北緯60°至南緯56°間陸地地表80%面積和95%以上的人類居住區,是迄今為止現勢性最好、分辨率最高、精度最好的全球性數字地形數據,在科研、測繪、軍事等領域得到廣泛應用。
1 地形數據的預處理
1.1 地形數據的重采樣
在航線使用中,不同類型的區域(全球陸地、海洋、終端控制區、機場區域等)數字地形所需的分辨率是不同的,因此在繪制三維地形之前,需要對原始地形數據進行重采樣。常用的數據重采樣方法有:最臨近法、雙線性插值法、三次樣條函數法、有限元法、小波變換法等等。最臨近法是根據采樣點的具體位置,從原始數據上尋找與它位置最接近的點來給采樣點賦值。最臨近法是數據重采樣中速度最快、最簡單的一種方法,但同時細節損失也最多;雙線性插值法是用最靠近采樣點的四個已知數據點進行插值計算,方法簡單,同時也保留較多的細節特征;三次樣條函數法在擬合時只需有少量數據點配準,它保留了微地物特征,同時也保證了連接處平滑連續,但是計算量相對較大;小波變換法的多分辨率分析特性為格網模型的多分辨率表示提供了一種一致性的、具有堅實理論基礎的處理方法。基于小波變換的多分辨率模型具有良好的局部細節層次控制特性,而且模型也有較好的連續性,但小波變換不能處理表面不連續的問題,而且算法比較復雜。
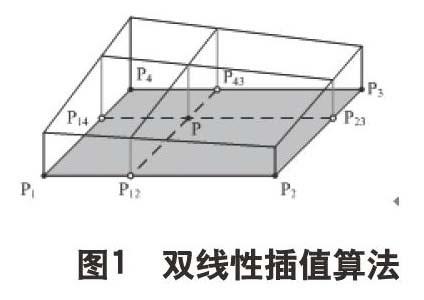
由于雙線性插值法算法簡單,在一定程度上能保留地面細節,適合工程應用,本文選用雙線性插值法來進行數據重采樣。如圖1所示。己知距離插值點P最近的4個點P1(x1,y1,H1),P2(x2,y2,H2),P3(x3,y3,H3),P4(x4,y4,H4),則點P(xp,yp,Hp)的高程Hp的計算方法為:首先用點P1和P4沿列方向線性插值出點P14,再用點P2和P3沿列方向線性插值出點P23,最后用點P14和P23沿行方向插值得到點P的高程Hp。或者,同理地先沿行方向線性插值再沿列方向線性插值。算法可表示為:
其中,
選取3弧秒分辨率的原始SRTM數據,采用雙線性插值法得到0.3弧秒分辨率的地形數據,分別對3弧秒及0.3弧秒分辨率的地形數據進行繪制,如圖2所示。
1.2 地形數據金字塔模型的構建
本文采用金字塔模型對地形數據進行分層處理,金字塔模型是一種多分辨率層次(multi-resolution hierarchy)模型,在圖像處理、圖像壓縮、圖像檢索,以及地形可視化等方面都有著非常廣泛的運用。通常采用倍率方法構建金字塔模型,從金字塔的頂層到底層,分辨率越來越高,但表示的地形范圍不變。設頂層的分辨率為R0,倍率為m,則第k層地形數據的分辨率 Rk為:Rk= R0×mk。
金字塔的底部是最高分辨率的地形數據,頂部是低分辨率的重采樣數據。這里約定:最頂層為第0層,由上至下層號逐層增加,隨著層號的增加圖象的分辨率以倍率m遞增,通常m取2。紋理數據及DEM數據需分別建立金字塔模型,并且兩模型的層數及分辨率保持一致。
將地形數據分層后,還需要對數據進行分塊存儲與調度。首先將最底層分塊,每個地形塊稱為一個瓦片(tile),設最底層瓦片數量為M,金字塔模型共L層,則第k層的瓦片數量mk=m×4-(L-k)。
地形數據分層分塊之后,必須對每一層的瓦片數據塊進行索引并存儲,由于每一層數據都是一個獨立的繪制單元,所以只需要使用簡單的層號和行列號即可作為瓦片塊的全局唯一標識,每個瓦片以文件的形式存儲,以層號-列號-行號的方式命名。
2 地形數據的動態調度
合成視景技術需實現超內存地形生成,因此需要對海量地形數據進行分塊,并動態調度瓦片塊參與地形繪制。在大規模場景漫游過程中,可見的瓦片塊是隨攝像機視錐的移動實時變化的,當視點離開當前所在的瓦片、視角變化、視場大小發生改變等情況下,必須重新構造瓦片的可視區域。由于飛機在飛行過程中,視點是連續移動的,因此可視區域也是連續變化的,需使用一個外層包圍緩沖區對可視區域內的瓦片進行預裝載,根據視點位置、視場、視角、可視距離,可以確定攝像機視錐在地形上的投影,該投影區域所覆蓋的所有瓦片都需要裝載到內存并參與繪制。與可視區域外層瓦片相鄰的所有瓦片構成外層包圍區域,該區域所覆蓋的瓦片也需要裝載到內存,但并不參與繪制。在場景漫游過程中,實時構造可視區域及緩沖區,將滿足裝載條件的瓦片從外存讀入內存,并將對地形繪制已無貢獻的瓦片卸載,釋放內存空間。
3 結束語
合成視景技術能夠有效改善飛行安全性,具有廣泛的應用前景,而三維地形的可視化是合成視景研究的重點,本文研究了SRTM數字高程模型用于地形可視化的預處理及調度方法,驗證了其在合成視景技術中應用的可行性。
參考文獻
[1] 劉躍.駕駛艙新變化[J].國際航空,2007,12:44-45.