智能仿生踝足的研究進展及展望
2016-05-14 16:43:52杜婷婷寧祎杜挺豪
科技創新與應用 2016年9期
杜婷婷 寧祎 杜挺豪
摘 要:通過對國內外各機構對智能仿生踝足的研究進行總結,對仿生踝足的未來發展趨勢進行展望。目前,對踝足的研究大多是基于殘疾人穿戴的假肢,而用于仿人機器人的踝足研究少之又少,仿人機器人作為未來重要的發展對象,其仿生踝足的設計將成為智能仿生踝足的又一新的發展趨勢。
關鍵詞:假肢;仿生踝足;仿人機器人
引言
仿生技術在不斷發展,假肢腳技術也在持續提高中。最近假肢研究人員認為要解決的關鍵而緊迫的問題是“模仿人類全部的腳踝行為”,這就有了仿生踝足的開發。大多數仿生踝足目前仍在研究開發水平,極少數裝置已經商業化。
1 國外的發展
按照驅動方式,仿生智能踝足的研究可以分為液壓型、氣動型、電動型三種。
1.1 液壓型
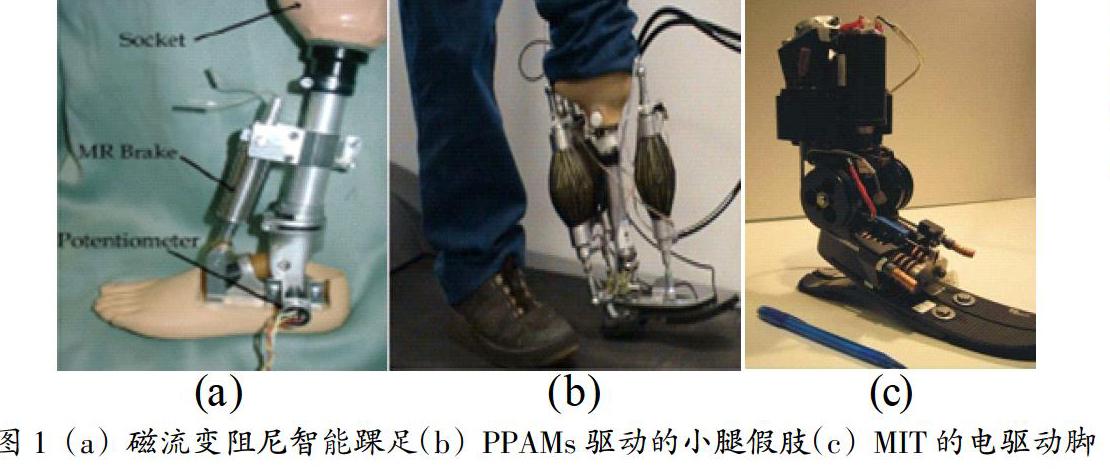
日本大阪大學某實驗室的科研人員采用磁流變阻尼控制原理,開發了一種被動踝關節假肢[1],其主要結構是一個裝有磁流變液的液壓缸,結構簡單,可無級調控,如圖1(a)所示。在關節軸上安裝有旋轉型電位器,可以測量踝關節的角度,并把角度作為輸入量,改變線圈電流,進而調整液壓缸內磁場, 使踝足假肢背屈跖屈的阻尼遵循期望值改變,具有一定的智能。
1.2 氣動型
Robotics&Multibody Mechanics research group研究小組(Vrije大學,布魯塞爾,比利時),開發了裝有百褶氣動人工肌肉的小腿假肢原型[2],如圖1(b)所示。假肢原型配備了三個PPAMs,1個放置在前面,2個放置在后面并行工作。僅用3bar肌肉的壓力,就可以容易地實現200Nm的高力矩輸出,腳踝運動范圍也可以達到30度。作為第一臺原型機,提供了一個概念驗證和評估控制算法的測試平臺,而氣壓動力和自主性方面問題尚未得到研究。
1.3 電動型
電驅動踝足假肢的研究工作大部分來自美國麻省理工學院(MIT)的Media實驗室。這個實驗室Hugh Herr領導的研究小組十幾年來對仿生踝足的研究一直都在持續進行中。迄今MIT實驗室已經制造了電動踝足假肢[3-5],如圖1(c)所示,它能夠模仿正常人體以自選的中等速度在水平地面行走過程中踝關節的生物力學行為。該系統使用一個SEA(串聯彈性驅動器)提供正常行走所需要的動力,控制器設計采用微控制器和傳感器結合的方法,用有限狀態控制器進行控制。
2 國內的發展
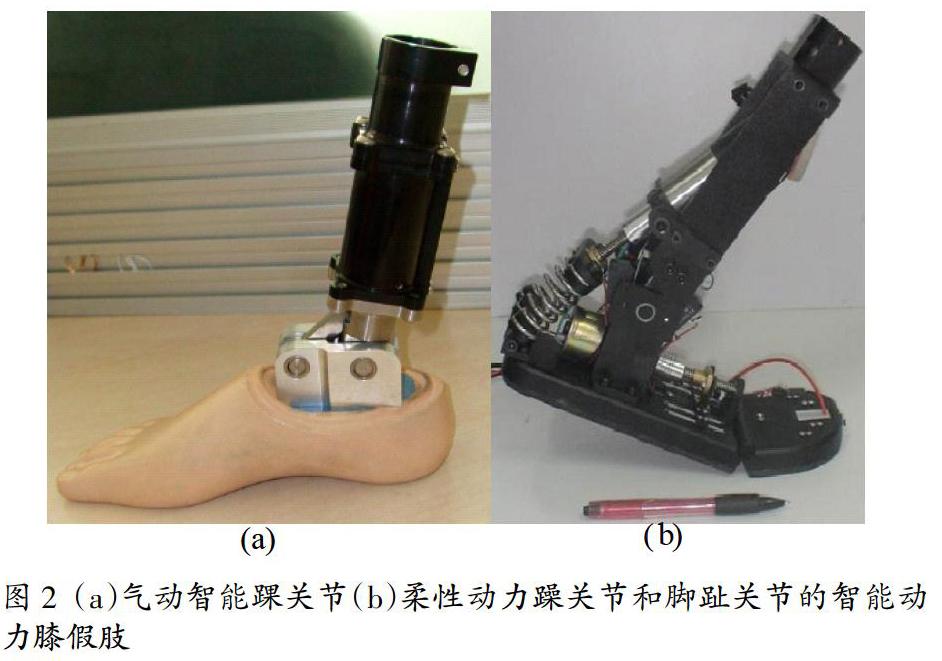
清華大學、河北工業大學和國家康復輔具研究中心三家單位合作,分工進行了阻尼可變式智能假肢踝關節的研究工作[6]。如圖2(a)所示,這個假肢踝關節有一個針閥元件,針閥的大小控制著氣室與大氣之間的氣體流動,從而控制活塞的往復運動,進而帶動踝關節做跖屈或背屈運動,具有一定的智能性。
北京大學設計的柔性動力踝關節和腳趾關節的智能動力膝假肢[7]。如圖2(b)所示,該踝足在踝關節處與跖趾關節處分別用一個SEA裝置,其控制原理與MIT的Media實驗室思路相同。
3 展望
由前所述,目前的研究大多還停留在假肢研究階段,并且技術相對越來越成熟,但隨著仿人機器人的發展,機器人的仿生踝足設計也將成為很多研究人員的重點目標。仿生踝足是仿人機器人與地面直接接觸的支撐點,并在調整機器人姿態和穩定行走中發揮重要作用,因此對仿生踝足的研究是雙足步行機器人技術中的一個難點。為仿人機器人雙足步行開發仿生踝足,不是簡單地對已有的踝足假肢結構直接移植使用,而是要根據仿人機器人的技術要求,有針對性地進行創新和改進。相信在不久的將來,機器人的仿生智能踝足設計將成為智能踝足的又一新的發展趨勢。
參考文獻
[1]Chengqiu Li, Miwa Tokuda, Junji Furusho, et al. Research and Development of the Intelligently Controlled Prosthetic Ankle Joint[C].IEEE International Confference on Mechatronics and Automation,2006:1114-1119.
[2]B. Vanderborght, D. Lefeber, F. Daerden, and M. Van Damme. Controlling a bipedal walking robot actuated by pleated pneumatic artificial muscles. Robotica[J].2006,V24(4): 401-410.
[3]S. K. Au, J. Weber, H. Herr. Powered Ankle-Foot Prosthesis Improves Walking Metabolic Economy[C]. IEEE Transactions on Robotics,2009,V25(1):51-66.
[4]Jing Wang, Oliver A Kannape Hugh M Herr. Proportional EMG Control of Ankle Plantar Flexion in a Powered Transtibial Prosthesis[C]. International Conference on Rehabilitation Robotics (ICORR), 2013.
[5]David Hill, Hugh Herr. Effects of a powered ankle-foot prosthesis on kinetic loading of the contralateral limb: A case series[C]. IEEE Int. Conf. On Rehabil and Robot,2013.
[6]楊鵬,柏健,王欣然,等.基于有限狀態機控制的智能假肢踝關節[J].中國組織工程研究,2013,17(9):1549-1554.
[7]Jingying Zhu, Qining Wang, Long Wang. Biomechanical Design of powered Ankle-foot Prosthetic witlh Compliant Joints and Segmented foot.
