基于柔性鉸鏈的杠桿-平衡機構的運動特性分析與參數設計*
2016-05-03 12:35:06劉慶綱秦自瑞郎垚璞天津大學精密測試技術及儀器國家重點實驗室天津300072
傳感技術學報 2016年3期
劉慶綱,孫 庚,秦自瑞,郎垚璞(天津大學精密測試技術及儀器國家重點實驗室 天津 300072)
?
基于柔性鉸鏈的杠桿-平衡機構的運動特性分析與參數設計*
劉慶綱*,孫庚,秦自瑞,郎垚璞
(天津大學精密測試技術及儀器國家重點實驗室天津300072)
摘要:基于微小力測量(mN級分辨力,N級測量范圍)的柔性鉸鏈杠桿-平衡機構,建立了此機構的運動數學模型,并利用有限元方法對該數學模型進行了驗證。數學模型計算及有限元分析結果表明,減小柔性鉸鏈的剛度、增大平行四桿機構的長度能增大被測力產生的位移,通過合理地選擇鉸鏈支點兩側的杠桿長度,能設計出所需的杠桿比及運動模型,從而為該機構的設計提供了理論依據。
關鍵詞:杠桿平衡機構;運動特性;ANSYS FEM分析;柔性鉸鏈
項目來源:國家自然基金項目(51575387);教育部博士點基金項目(20120032110059);天津市自然基金重點項目(14JCZDJC31100)
力平衡法是實現精密力測量的一種常用方法[1-2],該原理為被測力與作為測量系統的特定機構所施加的力經平衡機構平衡,通過測量施加力得到被測力的大小,而設計高精度的平衡機構,是實現被測力高精度測量的關鍵[3]。
柔性鉸鏈是一種小體積、無機械摩擦、無間隙和運動靈敏度高等特點的傳動機構,是為實現小范圍的偏轉和定位而提出的一種機構,因此被廣泛應用在各種精密機構的設計中[4-7]。應用柔性鉸鏈設計精密力測量設備的平衡機構是實現高精度力測量的一種常用方法,如梅特勒-托萊多有限公司生產的高精度電子天平即采用基于柔性鉸鏈設計的平衡機構,但未見到該機構的數學運動模型;國內也有廠家及高校對該結構進行研究,如湖南大學的邵萬里等人應用簧片替代柔性鉸鏈設計平衡機構[8-9],并對該機構的撓度進行了研究,但也未對該機構的數學運動模型進行解析;張霖[10]等人用材料力學能量法對平行四桿柔性鉸鏈機構的運動模型進行了推導,并用有限元方法對數學模型的正確性進行了驗證,但同樣沒有建立測力的一體化杠桿放大-平衡機構的數學模型。由于平行四桿柔性鉸鏈機構為杠桿-平衡機構的一部分,相比于平行四桿柔性鉸鏈機構,杠桿-平衡機構提供了力及位移的杠桿放大比,同樣的被測力易于產生更大的位移,在測力機構中具有不可替代的作用。因此,建立一體化柔性鉸鏈杠桿-平衡機構的數學運動模型并對杠桿-平衡機構的運動模型進行力學及結構分析,是此類微力測量力學模型中亟待解決的問題。
本文以柔性鉸鏈平衡機構為研究對象,從一體化柔性鉸鏈杠桿-平衡機構的基本結構出發,利用材料力學能量法對該機構的運動進行數學分析,建立該機構運動的數學運動模型,利用有限元方法對該機構的數學運動模型進行驗證,并根據數學模型及有限元分析結果分析該機構各個參數在設計時的選取方法,為一體化柔性鉸鏈杠桿-平衡機構的設計提供理論依據。
1 一般柔性鉸鏈的運動特性
目前,常見的柔性鉸鏈結構形式主要有三種,正圓形、橢圓形和直角形[11]。不同類型柔性鉸鏈的轉動剛度、轉角偏移量和靈敏度等均有所不同,其中正圓形柔性鉸鏈具有運動精度較高、易加工等特點,所以應用范圍較廣。
正圓形單軸柔性鉸鏈的結構參數如圖1所示。圖中R為柔性鉸鏈的切割半徑,t為鉸鏈的最小厚度,b為柔性鉸鏈的寬度,E為柔性鉸鏈材料的楊氏模量,組成柔性鉸鏈主要基本形變的是繞Z軸的力矩作用下產生的轉動,柔性鉸鏈繞Z軸的轉動剛度K的性能參數計算公式如下[12-13]:


圖1 正圓形柔性鉸鏈結構
2 基于柔性鉸鏈的杠桿-平衡機構
目前,被廣泛應用的基于柔性鉸鏈的平行四桿柔性鉸鏈機構如圖2所示,A、A′、B、B′、C、C′、D、D′分別代表相應的柔性鉸鏈。圖2為基于柔性鉸鏈的杠桿-平衡機構,由A、A′、B、B′、C、C′、D、D′、E、F、G的柔性鉸鏈及相應鉸鏈間剛體構成,其中A、A′、B、B′、C、C′、D、D′柔性鉸鏈及相應剛體所構成如圖3所示的平行四桿柔性鉸鏈機構,用于消除被測力的四角誤差,防止被測力由于施力點偏置所造成的誤差;柔性鉸鏈G及兩側剛體構成如圖4所示的杠桿機構,該機構為被測力和所施加力之間提供杠桿;柔性鉸鏈E、F及之間的剛體構成如圖5所示的拉帶機構,該機構為杠桿機構和平行四桿柔性鉸鏈機構之間提供柔性和位移轉移作用。為簡化起見,圖2、圖3中連接C、C′、D、D′的剛體約束并未畫出。

圖2 基于柔性鉸鏈的平衡機構
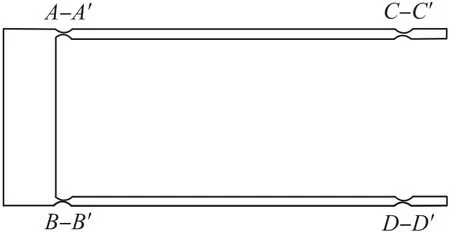
圖3 柔性鉸鏈平行四桿機構

圖4 杠桿機構

圖5 拉帶機構
機構的作用原理如圖6所示,施加被測力F′后,平行四桿柔性鉸鏈機構產生垂直向下的位移,該位移帶動柔性鉸鏈拉帶機構向下移動,將位移傳遞到柔性鉸鏈杠桿機構,使柔性鉸鏈杠桿機構繞支點鉸鏈G轉動,此時設置在杠桿另一端的位移檢測機構在右端產生位移時檢測出被測信號,并在該側由力發生機構施加如圖2所示的電磁平衡力Fb,使該杠桿重新穩定到最初的位置,此時通過右端施加的電磁平衡力Fb的大小即可通過杠桿比得出被測力的大小[14]。
在設計該類平衡機構時,為了滿足測量分辨力的要求,設計所需要考慮的必要條件為被測最小力應使杠桿右端產生的位移能被位移檢測機構檢測。杠桿的位移放大比由于涉及到平衡力Fb與被測力的比值,因此也是設計時應考慮的因素。
3 柔性鉸鏈平衡機構的運動及位移計算公式
基于材料力學能量法,對柔性鉸鏈杠桿-平衡機構的右端位移分析如下:
平行四桿柔性鉸鏈機構的運動模型[9]中,杠桿機構及其左端鉸鏈F的受力運動特性為:拉帶機構在柔性鉸鏈平行四桿機構受力向下運動后,鉸鏈F向下移動帶動杠桿傾斜,從而帶動鉸鏈G轉動,由于杠桿為一剛體,因此,鉸鏈F和鉸鏈G在同一方向上有相同的轉動角度,杠桿右端通過鉸鏈G的轉動產生位移。拉帶機構的運動特性為杠桿機構和平行四桿柔性機構之間的運動提供柔性,消除平行四桿柔性機構的耦合位移[15],防止由于耦合位移的影響造成柔性鉸鏈在運動過程中的扭曲變形。其整體的運動特性原理圖如圖6所示。
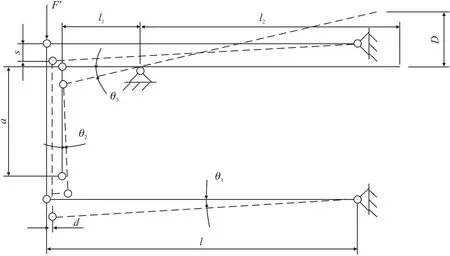
圖6 運動特性原理圖
在被測力F′作用下,左端剛體產生沿F′方向的位移S,由于該機構在設計時通常被用于微小力的測量,因此,位移S在實際應用中往往遠小于l等參數。此時,根據柔性鉸鏈平行四桿機構的運動特性,柔性鉸鏈平行四桿機構的4個鉸鏈的旋轉角度為:θ1=s/l,耦合位移為:d=s2/2l,鉸鏈F的耦合位移為d′=s2/l1,拉帶結構用于消除耦合位移,因此,拉帶結構的鉸鏈E的轉動角度為:θ2=arcsin((d-d′)/a)= (d-d′)/a;由于在實際設計中應盡力減小耦合位移,故a的長度往往設計得盡可能大,l和a的長度通常遠遠大于s,因此θ2的值往往比θ1小幾個數量級,可忽略不計。平衡杠桿的支點鉸鏈和左端的鉸鏈的轉動角度可由運動原理圖得出為:θ3=arcsin(s/l1)= s/l1。
為便于計算,根據材料力學能量法[15-16],設該平衡杠桿機構在力F′處的剛度為Kt,平行四桿機構的八個鉸鏈的轉動剛度均為K1,拉帶機構的兩個鉸鏈的轉動剛度均為K2,杠桿的支點鉸鏈的轉動剛度為K3。由于θ2遠小于θ1和θ3,則有:

將θ1和θ3的值代入式(2),可得Kt為:

則在力F′的作用下,位移S為:

則杠桿右端位移為:

將式(3)和式(4)代入式(5)中可得右端位移與力F’及該機構各參數的關系式為:

4 有限元驗證及設計分析
采用有限元分析軟件ANSYS12.0建立柔性鉸鏈平衡機構的有限元模型,在圖2中的柔性鉸鏈平行四桿機構的C、C′、D、D′鉸鏈的右側剛體及支點鉸鏈G的下部進行全約束,施加外力F=1×10-5N,從而可得出柔性機構的位移S。有限元單元類型為Solid95,采用六面體單元劃分網絡,參照常用的該機構尺寸及材料,機構的材料選用航空鋁,彈性模量E=71 GPa,泊松比μ=0.33,定義A、A′、B、B′、C、C′、D、D′柔性鉸鏈為最小厚度t1=0.1 mm半徑為R1=0.9 mm寬度b1=18 mm的直圓型柔性鉸鏈,由式(1)可得其轉動剛度為E1=0.3(N·m)/rad;定義E、F柔性鉸鏈為最小厚度t2=0.1 mm半徑為R2=0.9 mm寬度b2=12 mm的直圓型柔性鉸鏈,其轉動剛度為E2=0.2 (N·m)/rad;定義支點鉸鏈G為最小厚度t3=0.1 mm半徑為R3=0.9 mm,寬度b3=18 mm的直圓型柔性鉸鏈,其轉動剛度為E3=0.3(N·m)/rad,定義剛體部分參數分別為l=60 mm、l1=10 mm及l2=60 mm。在上述參數條件下,ANSYS的位移分析結果及應力分析結果如圖7和圖8,其中位移單位為毫米(mm),材料應力單位為兆帕(MPa),杠桿機構自由位移端為最大位移1.04×10-5mm;在整體機構參數不變的情況下,分別通過改變鉸鏈寬度的值改變E1、E2、E3的值及改變參數l、l1、l2的有限元分析值和理論計算值如圖9~圖14所示。經數據分析發現,有限元分析值與理論模型的計算值的結果相差不到5%;同樣,在通過改變鉸鏈的厚度t及半徑R等參數改變柔性鉸鏈剛度的情況下,同樣可以得到有限元分析值與理論計算值的結果相差不到5%的結果,由于該理論計算模型為近似運動模型、且有限元分析方法由于有限元網絡劃分密度設計不同也會對計算精度產生影響,5%的差值應屬合理允許誤差范圍,因此可以說ANSYS分析的結果驗證了式(1)~式(6)的正確性。

圖7 ANSYS位移分析結果圖
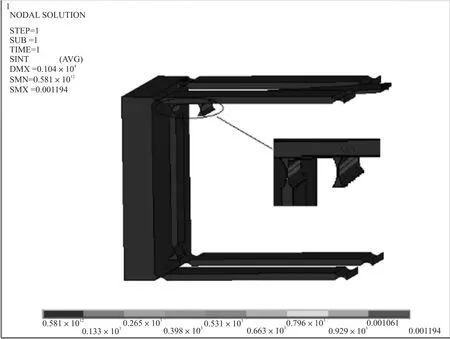
圖8 ANSYS應力分析結果圖

圖9 改變鉸鏈寬度b 的有限元值與理論值比較
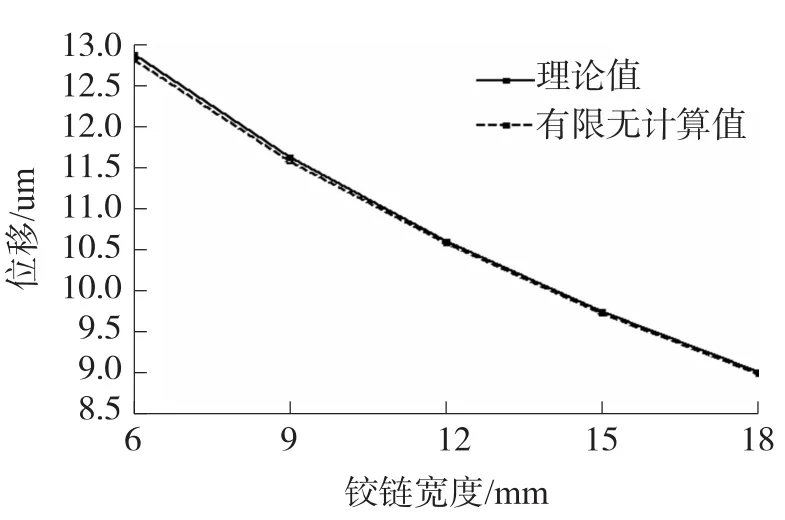
圖10 改變鉸鏈寬度b2的有限元值與理論值比較
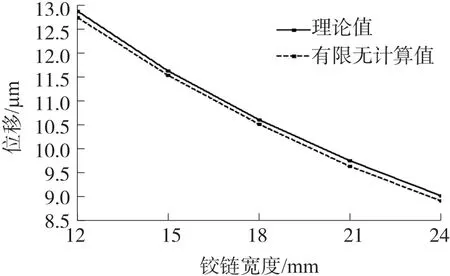
圖11 改變鉸鏈寬度b3的有限元值與理論值比較

圖12 改變長度l的有限元值與理論值比較

圖13 改變長度l1的有限元值與理論值比較
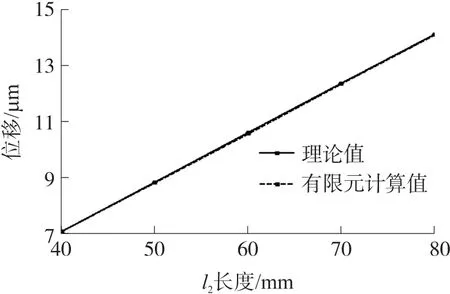
圖14 改變長度l2值的有限元值與理論值比較
在實際設計中,往往由于產品需求及材料特性等因素,各項尺寸存在限制,因此,需要對各項參數進行仔細選擇以提高性能指標。
式(1)~式(6)及有限元分析結果表明,在設計時,在加工能力的范圍內,該平衡機構的各個鉸鏈的剛度應盡可能小。對于結構尺寸參數的設計,如圖12所示,平行四桿機構的長度l越長,杠桿右端位移越大,因此在設計時應在尺寸允許的條件下加大l的長度。對于l1和l2的設計,由于尺寸限制,l1與l2的和往往應為一個固定尺寸,因此根據式(5),可根據設計要求的放大比(即l2與l1的比值)和位移量選取l2和l1的數值。
5 設計實例
本方法在精密天平的設計中進行了實際設計應用。電子天平基本原理為杠桿平衡法稱重,采用光電檢測測位法和利用電磁力反饋平衡零位法原理,實現對被稱物體質量的稱量。
以分辨力為1 mg、最大量程為200 g的實驗室天平的設計為例:首先根據電磁缸所產生的電磁力確定杠桿比及l1/l2的范圍,已知天平電路的電流檢測分辨力為100 nA,該電流能發生的力為10×10-7N,1 mg重物產生的重力大小為10×10-5N,因此l1/l2的值應大于1/100;已知電路能檢測的最大電流為400 mA,此時能穩定產生的電磁力為4 N,最大量程200 g所產生的重力被測力為2 N,因此l1/l2的值應小于2。據便攜性要求,所設計的天平機械結構的長×寬×高為50 cm×30 cm×8 cm以內;由于其內部還需放置電路板,防護罩等零件,杠桿平衡機構的空間為12 cm× 9 cm×6c m;因此,取尺寸l和a的最大值分別為長和高的2/3,即為8 cm和4 cm,l1與l2之和為9 cm。考慮到加工能力,柔性鉸鏈的最小加工厚度存在一定限制,因此設所加工的各柔性鉸鏈參數與有限元驗證部分的個鉸鏈參數相同。同時已知光電測位機構的分辨力為5 nm,即10×10-5N的被測力產生的位移D的值大于5 nm;根據式(6),l1的范圍為大于0.29 cm小于7.34 cm,由于l1/l2的值應大于1/100且小于2,且l1、l2之和為9 cm,因此l1的取值范圍應為0.29 cm 表1給出了上述約束條件下根據式(6)針對千分之一和萬分之一天平分辨力時對l、l1、l2的設計結果,從結果中可以看到,在上述已知條件和選取鉸鏈參數條件下,設計萬分之一天平時,計算結果表明不存在l1及l2的參數值可使天平達到該設計分辨力,此時應該考慮適當加長l、l1+l2,或者提高位移檢測機構或電路的分辨力。 表1 天平設計參數 在實際設計中,除了本文提及的柔性鉸鏈平行四桿機構、杠桿機構和拉帶機構外,還需根據加工條件及使用情況,設計裝配部分、電磁缸的安裝部分及校準機構等。圖15為一實際設計的天平機械部分結構圖。 圖15 實際設計圖 本文通過材料力學能量法給出了用于精密力測量中柔性鉸鏈平衡機構的數學運動模型(6),并通過有限元方法對該數學運動模型(6)的正確性進行了驗證,證明了模型的正確性,并利用該結論對電子精密天平進行了實際設計。根據所得運動模型及有限元分析的結果,分析了設計時各種參數的選擇方法,為此類機構提供了設計時的理論根據。 參考文獻: [1]鄧志軍.電子天平的原理與使用[J].理化檢驗:化學分冊,1997,(5):225-227. Deng Z J. The Principle and Use of Electronic Balance[J],Physi?cal Testing and Chemical Analysis Part B(Chemical Analysis),1997,(5):225-227. [2]駱欽華,駱英.天平的發展演變[J].中國計量,2003,(9):37-40. Luo Q H,Luo Y. The Evolution of the Balance[J]. China Metrolo? gy,2003,(9):37-40. [3]周兆敏,楊德鄰.高精度電子天平設計中的幾個問題[J].儀器儀表學報,1989,(1):3-10. Zhou Z M,Yang D L. Some Problems in the Design of High Preci?sion Electronic Balance[J]. Chinese Journal of Scientific Instru?ment,1989,(1):3-10. [4]王思民,云霞,陳軍政.基于柔性鉸鏈微位移放大機構的設計和分析[J].液壓氣動與密封,2011,31(1):17-20. Wang S M.Design and Analysis on Micro Displacement Magnify?ing Mechanism with Flexible Hinges[J]. Hydraulics Pneumatics & Seals,2011,31(1):17-20. [5]王旭,沈雪瑾,張永宇.基于柔性鉸鏈的熱驅動微夾鉗的實驗和仿真分析[J].傳感技術學報,2006,5A(5):1559-1562. Wang Xu,Shen Xuejin,Zhang Yongyu. Experimental Analysis and Simulation of Microgripper with Flexure Hinge[J]. Chinese Journal of Sensors and Actuators,2006,05A(05):1559-1562. [6]何高法,唐一科,劉世明,等.微加速度計中新型微杠桿機構設計和分析[J].傳感技術學報,2007,7:1535-1538. He Gaofa,Tang Yike,Liu Shiming,et al. A Novel Micro Leverage Mechanism Optimization for Micro Resonant Accelerometer[J]. Chinese Journal of Sensors and Actuators,2007,7:1535-1538. [7]Zou X,Guoping LI,Shen J,et al. Displacement Magnifying Mech?anism with Flexible Hinges Based on APDL[J]. Mechanical & Electrical Engineering Magazine,2009. [8]邵萬里.精密電磁力平衡傳感器設計[D].湖南大學,2012. Shao W L. The Design of Precision Electromagnetic Force Bal?ance Sensor[D]. Hunan University,2012. [9]梅特勒-托萊多有限公司.測力設備,特別是重量傳感器:中國,99119142.0[P].1999-09-17. Mettler Toledo. Force Measuring Equipment,Especially Weight Sensor:China,99119142.0[P].1999-09-17. [10]張霖,王建華.單平行四桿柔性鉸鏈機構剛度特性分析[J].華東交通大學學報,2013,(6):55-58. Zhang L,Wang J H. Stiffness Analysis of Single Parallel Four Bar Flexure Hinge Mechanism[J]. Journal of East China Jiaotong Uni?versity,2013,(6):55-58. [11]左行勇,劉曉明.三種形狀柔性鉸鏈轉動剛度的計算與分析[J].儀器儀表學報,2006,27(12):1725-1728. Zuo X. Calculation and Analysis of Rotational Stiffness for Three Types of Flexure Hinges[J]. Chinese Journal of Scientific Instru?ment,2006,27(12):1725-1728. [12]Paros J M,Weisboro L. How to Design Flexure Hinges[J]. Ma?chine Design,1965,37(27):151-157. [13]吳鷹飛,周兆英.柔性鉸鏈轉動剛度計算公式的推導[J].儀器儀表學報,2004,25(1):125-128. Wu Y. Deduction of Design Equation of Flexure Hinge[J]. Chi?nese Journal of Scientific Instrument,2004,25(1):125-128. [14]楊敏,滕召勝,陳良柱,等.基于CS5532的高精度電子天平設計[J].儀表技術與傳感器,2010,(1):14-17. Yang M,Teng Z S,Chen L Z,et al. Design of High Precision Elec? tronic Balance Based on CS5532[J]. Instrument Technique & Sensor,2010(1):14-17. [15]沈劍英,楊世錫,周慶華,等.單平行四桿柔性鉸鏈機構的輸出位移和耦合誤差分析[J].機床與液壓,2004,(3):27-28. Shen J Y,Yang S X,Zhou Q H,et al. Analysis on the Output Dis?placement and Coupling Error of Single Parallel Four-bar Flexure Hinge Mechanism[J]. Machine Tool & Hydraulics,2004,(3):27-28. [16]楊啟志,尹小琴,馬履中,等.能量法求解全柔性微動機器人移動副的剛度[J].江蘇大學學報(自然科學版),2005,26(1):12-15. Yang Q Z,Yin X G,Ma F Z,et al. Establishing Stiffness of Pris?matic Pair in Fully Compliant Parallel Micro-robot Using Energy Method[J]. Journal of Jiangsu University,2005,26(1):12-15. 劉慶綱(1964-),男,1987年于天津大學獲得學士學位,1990年于天津大學獲得碩士學位,1996年于天津大學獲得博士學位,現為天津大學教授博導,主要研究方向為光電及微納測試技術,lqg@tju.edu.cn; 孫庚(1990-),男,2013年于河北工程大學獲得學士學位,現為天津大學碩士研究生,主要研究方向為微納測試技術,sungeng@tju.edu.cn。 Kinematics Analysis and Parameter Design of Leverage Balancing Mechanism Based on Flexible Hinges* LIU Qinggang*,SUN Geng,QIN Zirui,LANG Yaopu Abstract:Leverage balance mechanism based on flexible hinges for small force measurement with mN order resolu?tion and N order range is described in this paper,and the motion model is derived. Finite element method(FEM,ANASYS)is used to validate the mathematical model. According to the results of both mathematical model and the FEM analysis,a conclusion that the displacement of the test force generated can be increased by reducing the stiff?ness of the flexible hinges and increasing the length of the parallel four-rod mechanism is obtained. Required lever?age ratio and motion model can be obtained by reasonably choosing the leverage length of the hinge pivot on both sides. Thus atheoretical basis for the design of the mechanism is provided. Key words:leverage balancingmechanism;Kinematics analysis;ANSYS FEM;flexible hinges doi:EEACC:7320M10.3969/j.issn.1004-1699.2016.03.002 收稿日期:2015-09-30修改日期:2015-11-21 中圖分類號:TH82 文獻標識碼:A 文章編號:1004-1699(2016)03-0313-07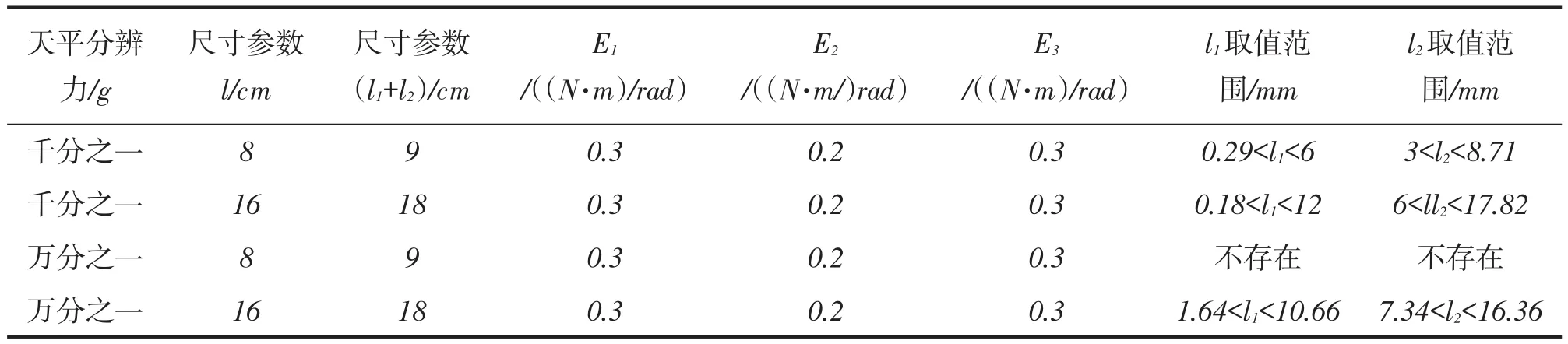
6 結論


(State Key Laboratory of Precision Measurement Technology and Instrument,Tianjin University,Tianjin 300072,China)