基于參數辨識的時柵轉臺在線自動標定系統*
2016-05-03 12:35:48張天恒李志明楊繼森重慶理工大學機械檢測技術與裝備教育部工程研究中心重慶400054重慶理工大學時柵傳感及先進檢測技術重慶市重點實驗室重慶400054
傳感技術學報 2016年3期
張天恒,李志明,楊繼森(1.重慶理工大學機械檢測技術與裝備教育部工程研究中心,重慶400054;2.重慶理工大學時柵傳感及先進檢測技術重慶市重點實驗室,重慶400054)
?
基于參數辨識的時柵轉臺在線自動標定系統*
張天恒1,2*,李志明1,2,楊繼森1,2
(1.重慶理工大學機械檢測技術與裝備教育部工程研究中心,重慶400054;2.重慶理工大學時柵傳感及先進檢測技術重慶市重點實驗室,重慶400054)
摘要:提出一種在線自動檢測時柵轉臺誤差、辨識誤差模型系數和誤差補償的方法。該系統由高精度的基準量儀圓光柵、微控制器與上位機組成。在對極點8個待定參數和對極內20個待定參數分別進行傅立葉變換的參數辨識,得到辨識誤差模型的系數,實現了實時在線誤差補償。為了檢驗在線自動標定效果,利用光電自準直儀與基于參數辨識的在線自動標定系統進行對比實驗。實驗結果表明,采用傅立葉變換的參數辨識,提高了時柵轉臺標定精度與標定效率,時柵轉臺的精度達到2.8″。
關鍵詞:時柵轉臺;自動標定;誤差補償;參數辨識
項目來源:國家自然科學基金項目(51205434,51405049,51406020);國家科技部重大科學儀器設備開發專項項目(2013YQ220893)
轉臺廣泛應用于航空、航天、兵器、航海、工業等領域。時柵轉臺就是將時柵傳感器作為轉臺的測角元件,時柵傳感器是依據時空坐標轉換理論[1-2],基于“時間量來測量空間位移”的原創思想發明的新型位移傳感器[3-4],隨著與哈量合作將時柵傳感器向產業化推進中,急需解決傳感器標定的關鍵問題。目前以高精度的儀器作為基準進行比對標定,大量應用于工業現場,如正多面棱體和多齒分度臺角分度誤差的互檢[5],需要多次轉位實現標定,多次轉位測量的可操作性較差;多傳感器聯合標定[6],必須滿足多傳感器的坐標能夠快速轉換,才能實現數據的正確融合;平行雙關節坐標測量機的標定[7],采用全誤差分析技術,需要設計專用的檢測裝置,完成特定項誤差的檢測工作;光電跟蹤轉臺的標定[8],角位移傳感器的自標定[9]等,日本國家計量研究院(NMIJ)提出的等分平均法[10],在度盤上整周均勻放置多個讀數頭來分離度盤刻線誤差,但這種方法要求讀數頭讀取刻線誤差的一致性極高。
本文結合時柵轉臺中時柵角位移傳感器的多對極、多讀數頭和每個對極內的誤差規律重復性好的特點,提出了參數辨識的在線自動標定方法。設計了主副控制器的雙閉環硬件結構和上位機的快速傅立葉變換(FFT)算法,對對極點與對極內誤差進行參數辨識,通過主控器實現了對時柵轉臺在線自動標定。最后利用光電自準直儀進行精度對比實驗,實驗結果表明,參數辨識的在線自動標定時柵轉臺的精度為2.8″。該方法實現了時柵轉臺的高精度在線自動標定,提高了標定的效率。
1 自動標定系統
1.1基于參數辨識的硬件電路結構
為了滿足低功耗/智能化的設計要求,片上系統選用數字信號處理器(DSP)和現場可編程門陣列(FPGA),副控制器選用NXP公司的高性能32位嵌入式ARM微控制器LPC2138[10],整個電路結構如圖1所示。
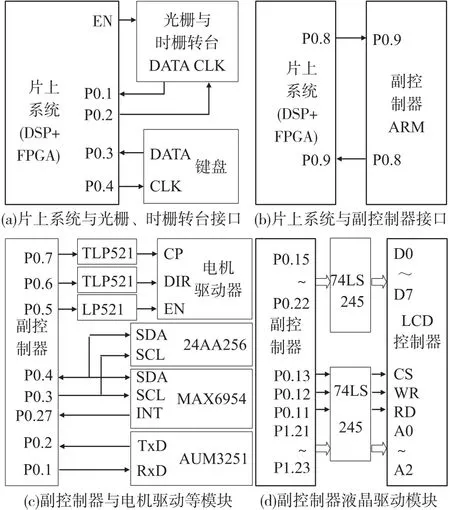
圖1 硬件設計電路
時柵轉臺的信號由三相互差120°激勵電源提供,經過整形,濾波。放大后變成方波信號提供給參數辨識模塊。參數辨識模塊由片上系統和并口轉串口芯片共同完成。FPGA主要完成時柵轉臺與圓光柵角度的測量,DSP主要完成參數辨識的數據處理,并口轉串口主要完成與上位機的通信,在上位機中通過測試軟件進行較為復雜快速傅立葉運算,將得到的在線標定參數通過DSP存儲在Flash中,進行誤差的在線修正與補償。
時柵轉臺自動定位閉環控制系統主要由副控制器構成,包括步進電機驅動、觸摸屏、液晶屏驅動。I/O 口3.3 V的電源由MC33269T3.3低壓差芯片提供,為了提高系統的抗干擾能力,采用TLP521高速光電隔離器進行隔離,步進電機的驅動采用PWM進行驅動。鍵盤驅動芯片采用帶I2C接口的MAX6954AA掃描管理34個按鍵。存儲器模塊采用帶I2C接口的EEPROM芯片24AA256,容量達到256 kbyte,滿足系統存儲要求[11]。LCD驅動模塊選用74LS245。
1.2在線標定系統的軟件設計
在線標定系統軟件需要上位機與下位機協調運行,上位機采用VC編寫,軟件有較強的容錯能力,有良好的可視化界面、能實時顯示與存儲曲線、易于操作等特點,是實現在線標定的指揮中心。主要進行快速傅立葉變換(FFT)等復雜數據的運算及標定的自動化工作。下位機主要完成時柵轉臺智能化的數據處理工作。系統在線標定軟件的流程圖如圖2所示。

圖2 自動標定系統軟件流程圖
2 補償參數辨識
傅立葉變換是信號分析技術廣泛應用在故障診斷、圖像處理等領域[12]。在時柵轉臺在線標定中,誤差分布曲線可用式(1)來表示:

式中,y(θ)表示誤差函數,Ak是第k次諧波幅值參數,單位為角秒(″),Pk是第k次諧波相位參數,單位為度(°)。
對極點采樣數等于對極數,對極內采樣180個點。本文應用傅立葉變換對時柵傳感器的在線標定結果進行分析,得到了對極點和對極內的參數辨識,為簡化數學模型,在對極點誤差曲線可用式(2)表示:

對極內誤差分布曲線可用式(3)來表示:

由式(2)、式(3)利用采集的實驗數據就可以計算出對極點8個待定參數,對極內20個待定參數,就可以確定時柵轉臺的補償模型,實現實時的在線補償與修正。表1是對極點的補償參數辨識,表2是對極內的補償參數辨識。
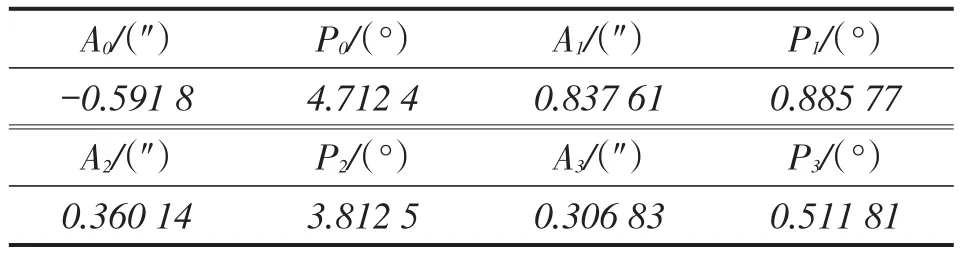
表1 對極點的補償參數辨識

表2 對極內的補償參數辨識
3 實驗與結果
3.1在線自動標定實驗系統
時柵轉臺在線自動標定系統實驗裝置如圖3所示。實驗臺以變形量較小的大理石為基體,時柵轉臺固定在大理石基體上,光柵固定在載物臺上。步進電機通過同步帶輪跟時柵轉臺相連,步進電機由副控制器(數控電氣箱)控制。時柵轉臺與光柵通過芯軸連接在一起,光柵經過200倍的細分盒IBV660B細分后接在主控制器光柵信號輸入口,主控制器按一定的周期通過串口向上位機發送光柵與時柵轉臺的數據,從而實現時柵轉臺在線自動標定的整周定點數據采樣。
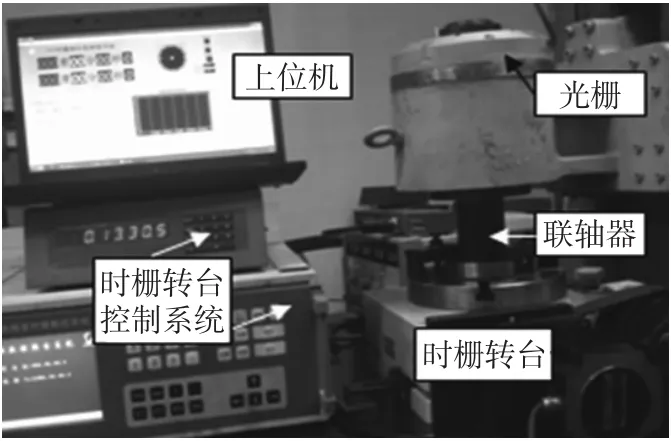
圖3 時柵轉臺在線標定系統實物圖
3.2讀數穩定性實驗
時柵轉臺讀數穩定性是影響在線標定的主要因素。打開上位機的采樣,在步進電機不運動的情況下,連續采樣時柵轉臺的數據,來測量時柵轉臺的讀數穩定性,如果讀數穩定性超過上位機設置的極限偏差,在線自動標定就沒法進行。時柵轉臺讀數穩定性如圖4所示。
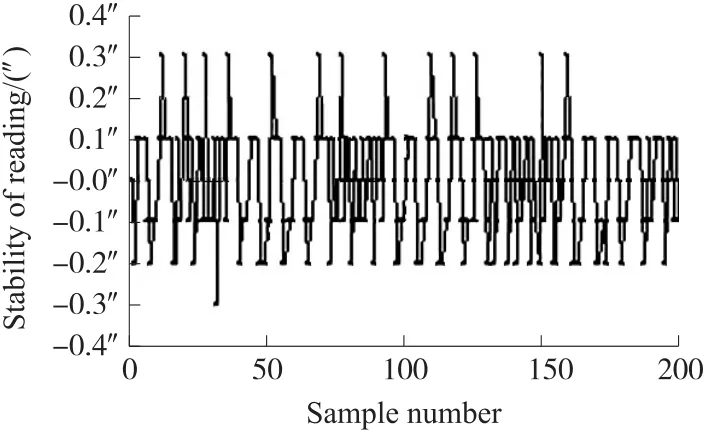
圖4 時柵轉臺讀數穩定性
3.3在線標定實驗
上位機負責對采樣數據進行實時參數辨識,并將辨識參數下載到主控制器中,進行誤差修正與補償。在整周進行測量,橫坐標代表0°~360°整周內進行數據的采樣,縱坐標代表誤差的幅值,單位為(″),實測誤差曲線如圖5所示,補償前的誤差為142″,補償后的誤差為2.8″,如圖6所示。
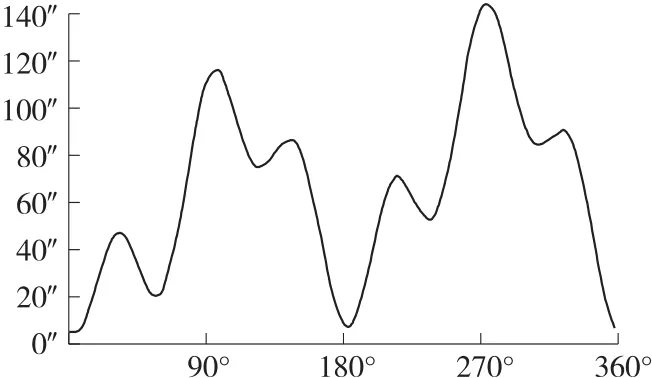
圖5 補償前實測誤差曲線
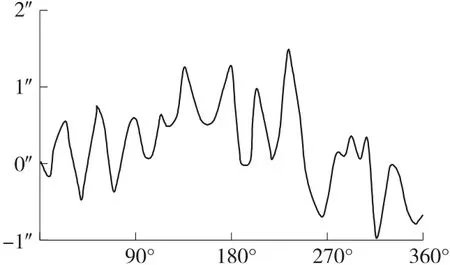
圖6 補償后實測誤差曲線
3.4比對實驗
為了檢驗基于參數辨識的在線自動標定效果,用光電自準直儀對時柵轉臺進行立式與臥式比對試驗,臥式比對試驗系統如圖7所示。
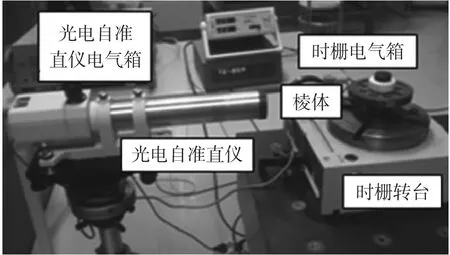
圖7 光電自準直儀比對試驗

圖8 時柵轉臺與光電自準直儀比對后誤差曲線
從表3可以看出,時柵轉臺臥式方向比對檢測,時柵轉臺的誤差為3.8″,從表4可以看出,時柵轉臺立式方向比對檢測,時柵轉臺的誤差為3.4″。采用參數辨識的時柵轉臺在線自動標定時柵轉臺的誤差為2.8″,參數辨識的時柵轉臺的精度與比對試驗精度還要高。

表3 臥式方向比對檢測

表4 立式方向比對檢測
4 結論
通過上述分析,可以解決以下3個問題:
①工作量問題。一個圓周有1 296 000″,如果分辨率為1″,采用逐點修正就要進行上百萬次采樣和修正;如果分辨率為0.1″,就要進行上千萬次采樣和修正[14]。而采用本方法提高了工作效率。
②零點問題。如果采用逐點修正法,上百萬個孤立點相互之間沒有任何規律可遵循,這時時柵轉臺空間位置的絕對零點尤為重要,一旦丟失或錯開少許,所有修正數據全部報廢[14]。而傅立葉變換的參數辨識以線帶點,上位機很快分析并修正出這條曲線,找到零點。
③應用問題。實驗結果滿足了時柵轉臺在線自動標定的基本要求,參數辨識誤差修正為后續的誤差自修正準備了條件,同時為時柵在精密測量領域的應用奠定了基礎。
參考文獻:
[1]Gao Z H. Error Calibration System for Time Grating Angular Dis?placement Sensor[C].Proceedings of 2012 International Confer?ence on Nanotechnology and PrecisionEngineering,Guilin,P.R. China:AMR,2013:705-708.
[2]彭東林,李彥,付敏,等.用于極端和特殊條件下機械傳動誤差檢測的寄生式時柵研究[J].儀器儀表學報,2013,34(2):359-365.
[3]武亮,陳錫候,王陽陽,等.磁導調制型時柵位移傳感器測量方法研究[J].傳感技術學報,2014,24(8):1043-1048.
[4]黃沛,鄭方燕,馮濟琴,等.納米時柵傳感器高精度激勵信號源研究與設計[J].傳感技術學報,2015,28(7):977-981.
[5]裘祖榮,陳清清,李敬杰.正多面棱體和多齒分度臺角分度誤差的互檢[J].光電工程,2009,36(10):90-93.
[6]徐志鵬,洪育仙,樊奇,等.多傳感器pVTt法氣體流量標準裝置測溫方案研究[J].傳感技術學報,2015,28(5):635-640.
[7]夏桂鎖,廖城,優燕軍.平行雙關節坐標測量機的標定及不確定度評價[J].光學精密工程,2014,22(5):1227-1234.
[8]徐濤,李博,劉廷霞,等.車載光電跟蹤系統跟蹤轉臺的初始標定[J].光學精密工程,2013,21(3):782-789.
[9]陳錫侯,茍李,官云麗,等.基于單個讀數頭角位移傳感器自標定方法[J].傳感技術學報,2014,2(8):1049-1053.
[10]Watanabe T,Fujimoto H,Masuda T. Self-calibration Rotary Encod?er[J].Journalof Physics:Conference Series,2005:54(1):240-245.
[11]周立功.嵌入式系統開發與應用[M].北京:北京航天航空大學出版社,2012:75-76.
[12]高忠華,陳錫侯,鄭方燕,等.時柵角位移傳感器誤差修正及其測試系統[J].儀表技術與傳感器,2012,(9):75-77.
[13]Pot TS D,T Asch E M. Numerical Stability of Fast Fourier Trans?forms[J]. Journal of Computational and Applied Mathematics,2008,222(2):655-674.
[14]彭東林,劉小康,張興紅,等.諧波修正法及高精度時柵位移傳感器[J].儀器儀表學報,2006,27(1):31-33.

張天恒(1973-),男,甘肅武威人,碩士,工程師,主要研究方向為精密儀器及機械和智能傳感器,zth@cqut.edu.cn;

楊繼森(1978-),男,四川成都人,博士,教授,主要研究方向為計算機輔助測試技術和智能傳感器,ywei@cqut.edu.cn。
Online Automatic Calibration System for Time Grating Turntable Based on Parameter Identification*
ZHANG Tianheng1,2*,LI Zhiming1,2,YANG Jiseng1,2
(1.Engineering Research Center of Mechanical Testing Technology and Equipment,Ministry of Education,Chongqing 400054,China;2.Chongqing Key Laboratory of Time-Grating Sensing and Advanced Testing Technology Chongqing University of Technology,Chongqing 400054,China)
Abstract:A automatic method is proposed to measure error of time grating turntable online,identify parameters of model and compensating error,automatically. The system is composed of the high precision grating as reference me?ter,micro-controller and PC. The undetermined parameters,8 on poles and 20 within poles,are identified by the Fourier transform,to obtain coefficients of identifying error model,and to realize the real-time online error compen?sation. To verify the results of online automatic calibration,online automatic calibration system based on parameter identification are performed and compared with the proposed parameter identification system and optoelectronic au?to-collimator. Experimental results show that the parameter identification of Fourier transform,can improve the ac?curacy and the efficiency of calibration,and the accuracy the time gratingturntable is up to 2.8″.
Key words:time gratingturntable;automatic calibration;error compensation;parameter identification
doi:EEACC:723010.3969/j.issn.1004-1699.2016.03.027
收稿日期:2015-10-15修改日期:2015-12-01
中圖分類號:TP206
文獻標識碼:A
文章編號:1004-1699(2016)03-0462-05