倉儲系統伸縮臂的結構優化研究*
2016-04-13 06:18:23陳俊明廖源泉
現代機械 2016年1期
陳俊明,劉 瓊,廖源泉
(南華大學機械工程學院,湖南衡陽421001)
?
倉儲系統伸縮臂的結構優化研究*
陳俊明,劉瓊,廖源泉
(南華大學機械工程學院,湖南衡陽421001)
摘要:對倉儲系統伸縮臂的結構進行了優化,優化的目的是減少伸縮臂的截面面積,從而降低制造成本。建立了伸縮臂優化數學模型,采用改進粒子群算法對該數學模型進行計算尋求截面面積的最小值,結果表明:相比基本粒子群算法,改進粒子群算法能夠有效避免算法陷入局部最優解,優化效果更好。將伸縮臂三維模型導入有限元軟件中進行結構靜力分析與驗證,結果表明優化后的伸縮臂結構力學性能滿足工況要求。
關鍵詞:倉儲系統伸縮臂結構優化粒子群算法有限元分析
0引言
立體倉庫已經成為現代倉儲的發展方向。伸縮臂因其結構緊湊,存取料靈活的優點,滿足現代智能化倉儲系統空間利用率高的特點,已經成為現代倉儲系統中接送料機構的關鍵部件。其性能的優劣對整個現代倉儲系統的運作效率影響重大,而且現代倉儲系統中的伸縮臂多數采用的是齒輪齒條直線差動行程倍增機構[1],其結構外形相似,通用性較強。目前有較多文獻對于大型工程機械伸縮臂結構進行了優化研究,而對現代倉儲系統中的伸縮臂結構優化研究還缺乏具體的工程實例。文獻[2]針對倉儲系統伸縮臂的外觀與傳動特性進行了設計,文獻[3-4]對倉儲系統伸縮臂的撓度與強度進行了計算與校核,文獻[5]對倉儲系統伸縮臂的動力學特性進行了分析,但還沒有文獻對倉儲系統伸縮臂的結構進行優化研究。綜上所述對現代倉儲系統中的伸縮臂進行優化研究是很有現實意義的。
粒子群算法[6](Particle Swarm Optimization, PSO)是一種典型的群體智能算法,因其簡單、易實現,不要求目標函數和約束條件可微,收斂速度快且可調參數較少等優點得到廣泛應用,目前已成功應用于復雜系統的參數優化、神經網絡權值的訓練及求解組合優化問題[7]等許多優化問題中。伸縮臂結構優化問題是多變量多約束的非線性規范問題,由傳統的迭代方法進行優化容易使目標函數陷入局部最優,從而難以找到最優解。因此選擇粒子群算法對伸縮臂結構進行優化在理論上是可行的。
1伸縮臂結構及工作原理
伸縮臂一般采用齒輪齒條或鏈輪鏈條傳動的三級直線差動機構,本文伸縮臂采用齒輪齒條傳動。其結構簡圖如圖1,伸縮臂主要由上叉、中間叉、固定叉構成,固定叉固定在工作臺上,中間叉相對固定叉可以伸出一定距離,上叉安裝在中間叉上,相對中間叉可以伸出更遠的距離,實現貨物的存取。固定叉及上叉兩側裝有導向滾輪,能在中間叉兩側的導軌上滑動。其傳動原理如圖2,固定齒條安裝在固定叉上,滾動齒輪安裝在中間叉上,從動齒條安裝在上叉上,根據相對運動原理,固定齒條與滾動齒輪的節點為二者的速度瞬心,當安裝在中間叉上的滾動齒輪相對于固定叉上的固定齒條滾動時,安裝在上叉上的從動齒條以兩倍于滾動齒輪中心的速度水平移動,這樣就在固定叉,中間叉,上叉之間形成了行程倍增的差動傳動[8]。這樣的結構緊湊,空間利用率高。
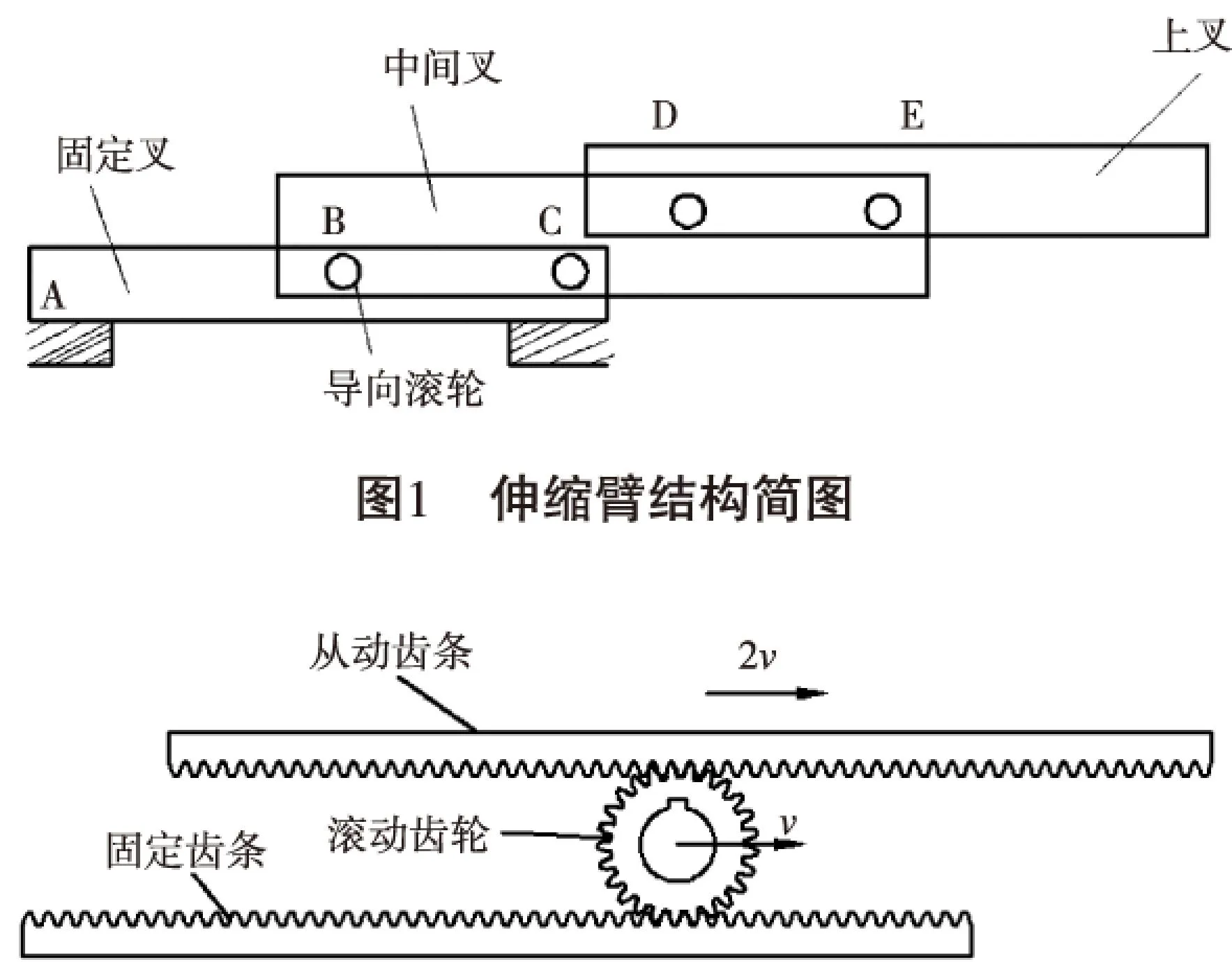
圖2 齒輪齒條差動機構
2伸縮臂數學模型的建立
伸縮臂貨叉外形尺寸:1 000 mm (長) ×194 mm (寬) ×124 mm (高),工作參數:行程1 000 mm,最大載荷5 000 N。
2.1伸縮臂受力分析[9]
在最大行程下對伸縮臂受力模型進行簡化,簡化后的受力模型如圖3。

圖3 伸縮臂力學模型
圖中,a、b、c、d、e、f為各支點間尺寸;FA、FB、FC、FD、FE為支點反力;G為貨物重量。設W1,W2,W3分別為上叉、中間叉、固定叉的截面系數;I1,I2,I3分別為上叉、中間叉、固定叉的截面慣性矩;E為材料的彈性模量。
2.1.1上叉受力分析
上叉在貨物的作用下,在D、E處產生支反力,其受力如圖4所示。
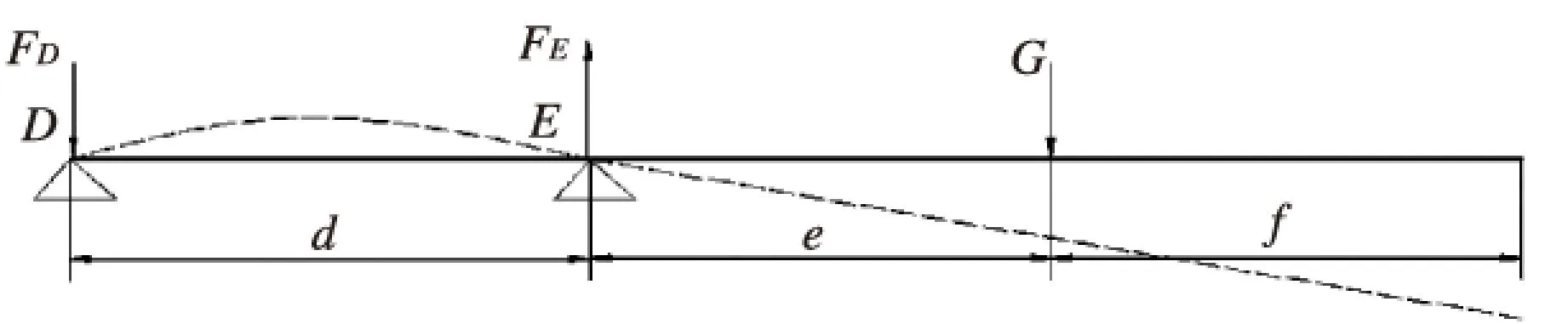
圖4 上叉受力簡圖
由圖可得D、E支點反力:
FD=eG/d
(1)
FE=(e+d)G/d
(2)
E點傾角:
θE=-eGd/3EI1
(3)
引起伸縮臂前端撓度:
K1=θE(e+f)=-Ged(e+f)/3EI1
(4)
上叉最大彎矩發生在E點:
ME=-Ge
(5)
上叉最大彎曲應力:
σ1=ME/W1
(6)
2.1.2中間叉受力分析
中間叉受力和變形如圖5所示。
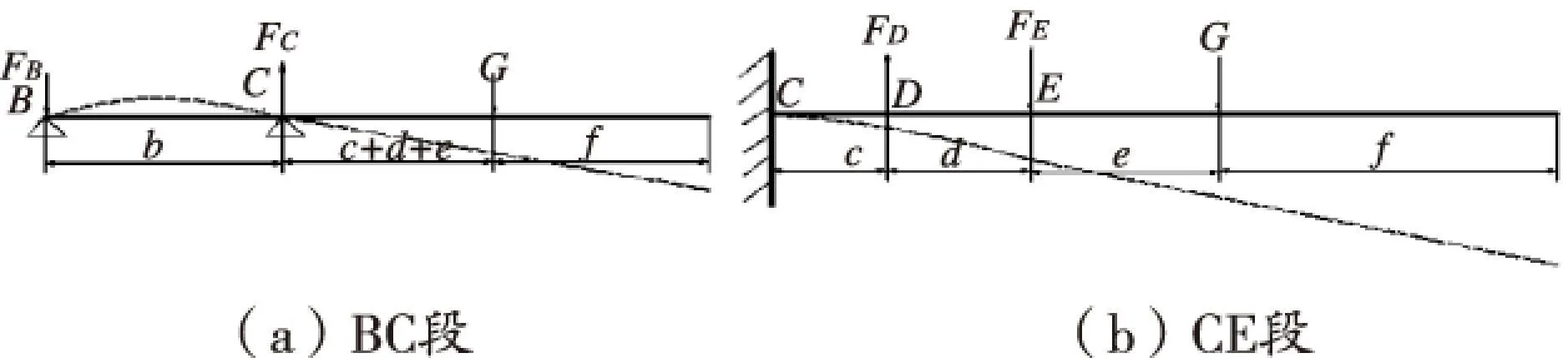
圖5 中間叉受力簡圖
如圖(a)所示,將C點到伸縮臂前端看作整體,可得B、C支點反力:
FB=(c+d+e)G/b
(7)
FC=G(b+c+d+e)/b
(8)
C點傾角:
θC=-Gb(c+d+e)/3EI2
(9)
引起伸縮臂前端撓度為:
K2=-Gb(c+d+e)(c+d+e+f)/3EI2
(10)
如圖(b)所示,設BC段為剛性,C為固定端,把BC段看作剛性,C端為固定端。由FD產生的伸縮臂D點傾角和前端撓度分別為:
θD=eGc2/2EI2d
(11)
K3=eGc2[3(c+d+e+f)-c]/6EI2d
(12)
由FE產生的伸縮臂E點傾角和前端撓度分別為:
θe=-G(d+e)(c+d)2/2EI2d
(13)
K4=-G(e+d)(c+d)2[3(c+d+e+f)-(c+d)]/6EI2d
(14)
中間叉最大彎矩發生在C點或D點,中間叉最大彎曲應力:
σ2=MC/W2或σ2=MD/W2
(15)
2.1.3固定叉受力分析
設C點到伸縮臂前端為不變形部分,固定叉受力如圖6所示。
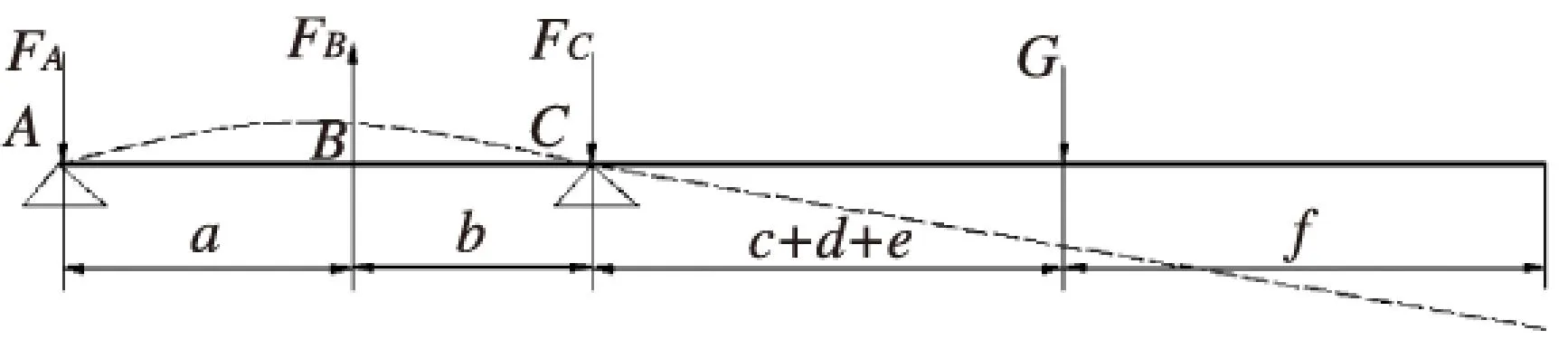
圖6 固定叉受力簡圖
由圖可得A點支反力:
FA=(c+d+e)G/(a+b)
(16)
由FB產生C點傾角與前端撓度分別為:
θC=-Gab(c+d+e)(2a+b)/6EI3b(a+b)
(17)
K5=-Gab(c+d+e)(2a+b)(c+d+e+f)/6EI3b(a+b)
(18)
固定叉最大彎矩發生在B點:
MB=-Ga(c+d+e)/(a+b)
(19)
固定叉最大彎曲應力:
σ3=MB/W3
(20)
2.2伸縮臂優化數學模型
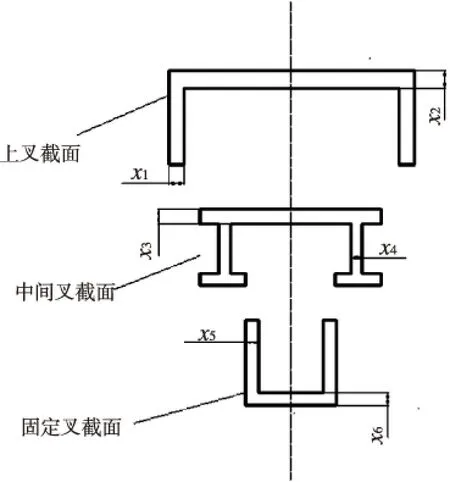
圖7 伸縮臂截面簡圖
以伸縮臂制造經濟性為目標,即以伸縮臂重量為目標,由于伸縮臂可以看作等截面梁,因此可以簡化為以伸縮臂截面面積為優化目標函數。伸縮臂截面簡圖如圖7所示。
由上到下,伸縮臂截面分為上叉截面,中間叉截面,固定叉截面。x1,x2,…x6為截面厚度,單位為mm。其中i=1,2,3,分別表示上叉,中間叉,固定叉;A,M,W分別表示橫截面積,最大彎矩,截面系數。伸縮臂叉取貨物的最大撓度一般規定不超過5mm[10],即[K]=K1+K2+K3+K4+K5≤5mm,伸縮臂許用彎曲應力[σ]為50MPa[4]。為了滿足工藝尺寸約束條件,截面厚度尺寸應控制在5mm~20mm之間。以伸縮臂截面面積為目標函數,以截面厚度為設計變量,以伸縮臂撓度,強度等為約束條件建立優化數學模型如下:
K(x)=K1(x)+K2(x)+K3(x)+K4(x)+K5(x)≤[K]
5≤xj≤20(j=1,2,3…6)
(21)
3伸縮臂結構優化
3.1基本粒子群算法
在PSO算法模型中,每個粒子的狀態由兩個向量來描述:速度向量表示粒子在搜索空間的運動方向,位置向量表示問題的可行解。粒子通過不斷學習自己發現的局部最優解pbest和全局最優解gbest,實現算法的全局最優搜索[6]。基本PSO算法速度與位置更新方程如下:
vij(t+1)=ωvij(t)+c1r1[pbestij(t)-xij(t)+→
←c2r2(gbestj(t)-xij(t))]
(22)
xij(t+1)=xij(t)+vij(t+1)
(23)
式中:vij(t),xij(t)分別表示粒子i在進化到第t代時的第j維飛行速度分量和位置分量;pbestij(t)表示粒子i在進化到t代時的第j維個體最優位置pbesti分量;gbestj(t)表示進化到t代時整個粒子群最優位置gbest的第j維分量;c1,c2加速因子或學習因子,c1調節粒子飛向自身最優位置的飛行步長,c2調節粒子飛向群體最優位置的飛行步長;r1,r2[0,1]的隨機數;ω為慣性權重, 代表粒子先前速度對當前速度的影響,基本PSO算法ω取1。
3.2慣性權重線性遞減的改進粒子群算法
ω為慣性權重, 代表粒子先前速度對當前速度的影響,用來調節全局搜索與局部搜索能力。Shi[11]等研究發現,當ω≤0.8時,PSO算法具有較強的局部搜索能力,ω≥1.2時,PSO算法具有較強的全局探索能力。基本PSO算法ω恒為1,不能動態靈活地調節全局搜索與局部搜索能力,不利于粒子群保持多樣性,因此容易陷入局部最優解。針對基本PSO算法的這種缺陷,提出一種ω調整策略:在進化過程中,線性減少ω的值,這樣可以使算法在進化初期全局探索能力較強,能在較大范圍的解空間內搜索,并不斷搜索新的區域,在后期逐漸收斂到較好的區域再進行更精細的搜索,以加快收斂速度。這樣可以靈活地調節全局搜索與局部搜索能力,有助于保持粒子群的多樣性,有效避免了基本PSO算法容易陷入局部最優解的缺陷,并且收斂速度更快。慣性權重線性遞減的改進粒子群算法 (AdvancedParticleSwarmOptimization,APSO)的慣性權重更新公式如下:
ω=(ω1-ω2)×(T-t)/T+ω2
(24)
式中:ω1,ω2分別為慣性權重的初始值與終端值;t和T分別為當前進化代數和最大進化代數。
3.3兩種粒子群算法優化及比較分析
運行PSOt優化工具箱[12],粒子數取30,ω1取0.9,ω2取0.4,c1=c2=2,最大進化代數取1 500,算法優化過程如圖8所示,圖中橫坐標為算法進化代數,縱坐標為對應的最優解,左圖為基本PSO算法收斂曲線圖,在進化初期,曲線下降速度較快,隨著進化代數增加,由于基本PSO算法ω恒為1,不能靈活地調節搜索能力,進化到100代以后曲線下降速度緩慢,逐漸陷入局部最優解,最終進化到1 000代左右收斂, 最優解為5 905.44mm2;右圖為APSO算法收斂曲線圖,在進化初期,全局搜索能力較強,曲線下降速度較快,隨著ω值逐漸減少,算法的全局搜索能力下降,局部搜索能力加強,進化到200代以后,曲線下降速度減慢,算法收斂速度加快,進化到600代左右時收斂,最優解為5 767.3mm2。比較可知:APSO算法比基本PSO算法少進化了400代左右,收斂速度更快,并且優化效果更好。
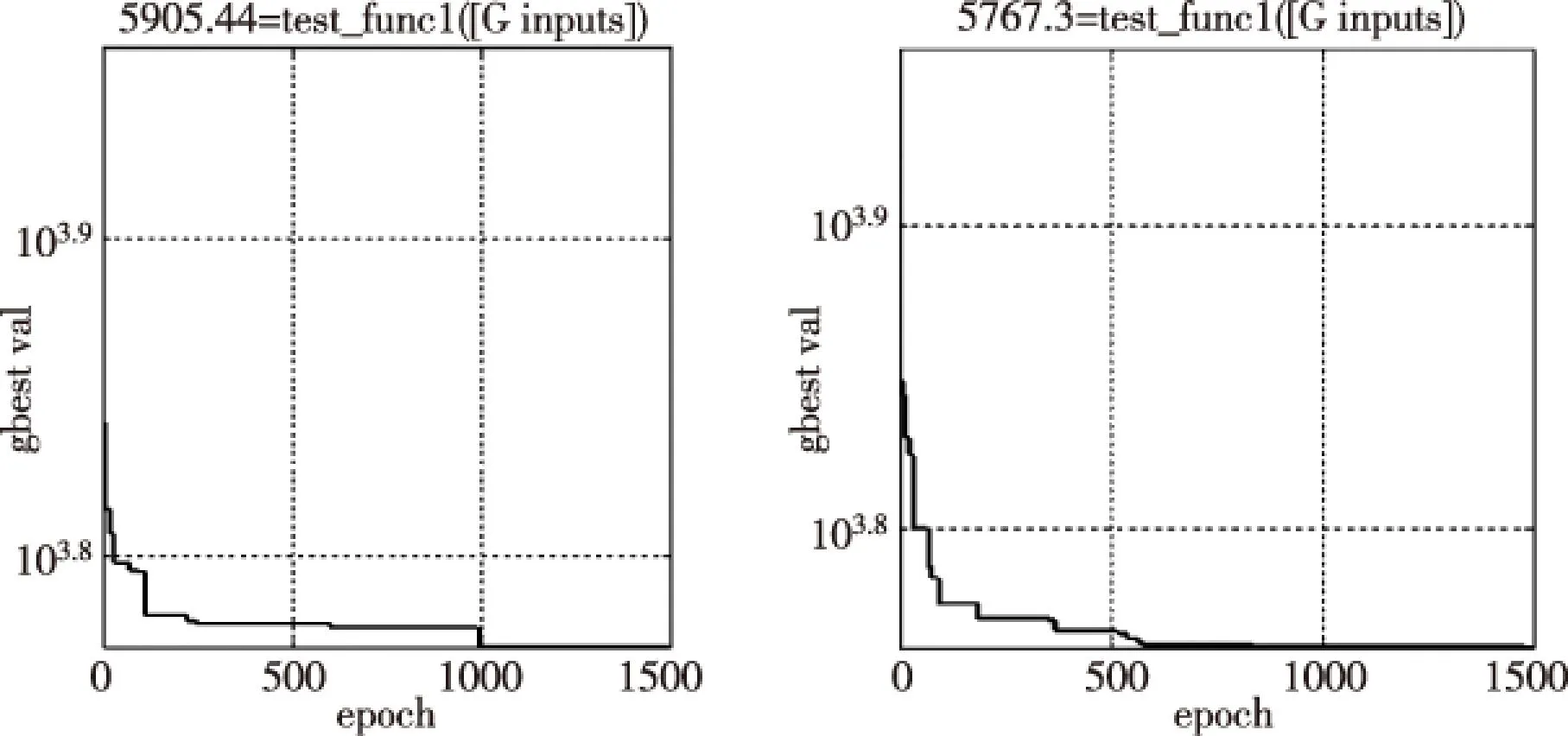
圖8 PSO算法與APSO算法收斂曲線圖
算法優化結果見表1,由表可知:相對于優化前,兩種粒子群算法優化后伸縮臂截面面積都有所減少,APSO算法優化效果尤為明顯。根據實際加工要求,對表1中APSO算法優化結果圓整:x1=5,x2=5,x3=8,x4=5,x5=13,x6=7,f(x)=5 801,相比優化前,伸縮臂截面總面積減少了27.6%,即伸縮臂總重量下降了27.6%,優化效果明顯。
表1 PSO算法與APSO算法優化結果對比
4有限元分析驗證
4.1有限元網格的劃分
為了減少計算量,將對伸縮臂強度和撓度影響較小的局部結構進行簡化,將簡化后伸縮臂三維模型導入有限元軟件workbench,伸縮臂所用材料為45號鋼,設置密度為7 890 kg/m3,泊松比為0.269,彈性模量為210 GPa,屈服強度355 MPa,取安全系數為1.8,即許用應力為197 MPa。采用多區域掃掠方式劃分網格,劃分后節點總數為148 913,單元總數為88 306,有限元模型如圖9所示。
4.2施加載荷及求解

圖9 伸縮臂有限元模型
對固定叉底板施加固定約束,因為通常采用一對伸縮臂存取貨物,所以每個伸縮臂承受2 500 N的力,均布施加在194 mm×1 000 mm上叉上平面上,即對上叉上平面施加12 887 Pa的均布載荷。求解后得到優化前的伸縮臂Z方向變形(撓度)云圖如圖10,伸縮臂最大變形發生在伸縮臂的上叉最前端,撓度為0.735 03 mm小于規定值5 mm;等效應力分布云圖如圖11,最大等效應力發生在固定叉與中間叉接觸面附近,大小為112.39 MPa小于許用應力197 MPa,安全裕度較大。

圖11 等效應力分布云圖
優化后伸縮臂Z方向變形云圖如圖12,伸縮臂最大變形發生在伸縮臂的上叉最前端,相比優化前有所增加,為2.471 1 mm但小于規定值5 mm;等效應力分布云圖如圖13,最大等效應力發生在固定叉與中間叉接觸面附近及固定叉銷軸上,相比優化前也有所增加為157.65 MPa,但小于許用應力197 MPa,滿足工況要求。
圖13 優化后模型等效應力分布云圖
5結語
通過改進ω的調整策略,相比PSO算法,APSO算法能夠有效避免算法陷入局部最優解,收斂速度更快,優化效果更好;通過有限元分析驗證,優化后的伸縮臂力學性能滿足條件,表明改進粒子群算法應用到伸縮臂結構優化研究中是可行的。
在實際工作中,伸縮臂存取貨物存在沖擊振動大,噪音大,運行不平穩等問題,需要考慮其動態特性。因此進一步研究需要把伸縮臂動力學特性作為約束條件添加到伸縮臂優化數學模型中來。
參考文獻
[1]鄒雪梅.基于ANSYS的立體庫堆垛機貨叉建模與分析[D].甘肅:蘭州大學,2013.
[2]胡衛寧,盧宗慧,饒金海,等.基于3D設計的新型雙伸位貨叉[J].制造業自動化,2013,35(8):100-101.
[3]宋章領,沈敏德,薛云娜.堆垛機貨叉靜態撓度計算[J].起重運輸機械,2008(4)41-43.
[4]安曉鋼,史勝楠,徐正林.自動化倉庫堆垛機貨叉強度的分析與計算[J].陜西科技大學學報,2007,25(3):123-125.
[5]孫永吉,張紅梅,鄒雪娟.堆垛機多級貨叉瞬態動力學分析[J].機械設計與制造,2013(4)134-136.
Research on structure optimization of warehousing system’s telescopic boom
CHEN Junming,LIU Qiong,LIAO Yuanquan
Abstract:The structure of warehousing system’s telescopic boom is optimized to reduce the cross-sectional area of telescopic boom, thus reducing the manufacturing cost. The optimization mathematical model of telescopic boom is established, advanced particle swarm optimization algorithm (APSO) is used to calculate the minimum value of cross section area. The results show that: compared with the basic particle swarm optimization algorithm (PSO), APSO can effectively avoid algorithm trapping in partial optimal solution, the optimization effect is better than PSO. The 3D model of telescopic boom is imported into finite element software for structural static analysis and verification. The results indicate that the structural mechanical properties of optimized telescopic boom satisfy the working requests.
Keywords:warehousing system; telescopic boom; structure optimization; particle swarm optimization; finite element analysis
中圖分類號:Th146
文獻標識碼:B
文章編號:1002-6886(2016)01-0014-06
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
上海節能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
現代企業(2015年2期)2015-02-28 18:45:09
機械工程師(2015年10期)2015-02-02 01:14:03