簡易平面標靶下的三維掃描與數據配準
2016-04-11 01:25:33袁聰聰張志毅
測繪通報 2016年2期
袁聰聰,張志毅
(西北農林科技大學信息工程學院,陜西 楊凌 712100)
?
簡易平面標靶下的三維掃描與數據配準
袁聰聰,張志毅
(西北農林科技大學信息工程學院,陜西 楊凌 712100)
3D Scanning and Data Registration Based on Easy Plane Calibration Board
YUAN Congcong,ZHANG Zhiyi
摘要:為實現對物體表面三維信息的自動獲取和多方位掃描結果的數據配準,提出了一種基于簡易平面標靶的標定方法,并構建了相應的線激光三維掃描系統。首先,設計制作一個含有10個特征點的平面標靶,并利用平面標靶中的特征點對掃描系統進行姿態和位置標定;其次,利用平面標靶中的特征點計算其平面方程及平臺平面方程;然后,在掃描時可以利用上述所得的平面方程求出激光平面方程,進而采用幾何知識計算得到三維點云數據;最后,根據移動前后標靶圖像上特征點信息計算出掃描系統的外部參數——平移旋轉矩陣,從而可以實現多方位掃描數據的配準。試驗結果表明,在距離45 cm處,幾何投影變換求得的平面方程誤差小于0.5%,每幅圖像處理的時間小于60 ms,誤差低于1.15 mm,基本滿足三角測量的穩定可靠、精度高、成本低、比較適合現場標定等要求。
關鍵詞:結構光;三維掃描;平面標靶;點云數據配準;攝像機姿態
線結構光三維掃描可實現對待測物體的非接觸掃描,在逆向工程中發揮著越來越重要的作用,是獲取待測目標表面輪廓信息的一種十分有效的方法,在掃描實物、建立CAD數據、檢測鐵軌等損壞程度及工件的形狀尺寸、建立虛擬城市及虛擬農場、文物的保護與修復重建、人體建模、汽車飛機等制造業諸多領域有著很普遍的應用[1-3]。而且激光三維掃描設備在近些年逐漸向易于操作與攜帶、制造成本低、抗干擾性強、掃描效率高和誤差小等方向發展,特別是三維打印機的產生,在眾多研究領域有著很廣闊的發展前景。按照激光三維掃描方式的不同,一般將激光三維掃描分為相位式、脈沖式、脈沖-相位式及三角法式4種。對于采用脈沖和相位方式的激光三維掃描儀,此類設備對激光的接收端及發射端都有著很精密的要求,一般操作十分復雜,而且攜帶困難,價格相對比較高。相比而言,采用三角法式的激光三維掃描的掃描原理則相對簡單了很多,而且不需要價格昂貴的接收和發射儀器。
隨著近年來CCD/CMOS的迅猛發展并日臻成熟,激光器結合攝像機構建而成的三維掃描系統已經實現了低成本、高精度、易于攜帶和操作要求的部分理論探討和技術研發,基于三角法式的三維掃描在當今發展越來越成熟。目前國內外很多專家學者都在研究基于結合(單目、雙目、多目)攝像機和激光器的激光三維掃描系統的構建原理和實現方法,其中有很多值得學習和借鑒的地方。一般的,每次掃描只能得到所測物體單側表面離散點集的空間坐標信息,人們將這些坐標信息稱為點云數據信息。當要獲得目標整體的三維坐標數據時,通常采用平移和旋轉的掃描方式來實現[4]。掃描系統在挪動之后進行再次掃描所獲得的數據,會因為與首次掃描的基準點和基準平面不統一而需要數據配準。為解決該問題,需要獲得每次掃描相對于首次掃描基準點和基準平面的位置和姿態信息。通常為獲得這些姿態信息需要借助高精度的輔助設備(如慣導系統和陀螺儀),這既增加了系統設計的成本,還增加了系統校準的難度及計算的復雜度。文獻[5—6]介紹了一種基于圖像的標定方法,但是其標定板和標定算法都很復雜,時間復雜度不好。文獻[7—8]也給出了一種激光三維掃描系統的設計,掃描精度高,但是所需設備成本太高。為了降低算法設計和系統校準的復雜度,以及設計成本,本文提出了一種手持式操作簡單、誤差小的設計方案——基于平面標靶的線激光三維掃描系統的構建和姿態標定,只需一些特征點就可以進行系統的標定和掃描結果的計算,以及半球空間內360°自由配準。
一、三維掃描原理
本文采用三角法式三維掃描,此算法利用三角形幾何關系,計算獲得觀測點到被測對象的距離。
1. 系統設計
試驗中采用一種線激光器,線激光器發射一束激光到物體表面上,由于表面的不同幾何形狀,激光條會發生變形而出現在攝像機視野的不同位置,然后利用攝像機獲取含有激光光條的待測對象圖像。物體表面的激光光條中心的各點、攝像機中心及激光源原點組成一系列三角形,此技術稱作三角法式測距[9]。圖1為三維激光掃描系統構造原理。從圖1可以看出,三維激光掃描裝置一般包含激光發射設備、攝像機、被測物體及參照物試驗臺等。

圖1 三維激光測量原理
作為激光三維掃描系統最基本的構造,掃描過程中激光源在物體上留有激光條紋,攝像機獲取含有激光條紋的目標對象圖像,之后計算出圖像中光條中心,最后采用一系列幾何計算得到待測對象在空間中的坐標信息。
2. 標定板設計
為了能夠更好地設計系統的位置和姿態的標定,在本研究中設計了如圖2所示的平面標靶,在平面標靶中可以看到有主要的4個黑圓圈,以及周圍一些相對較小的黑圓圈。
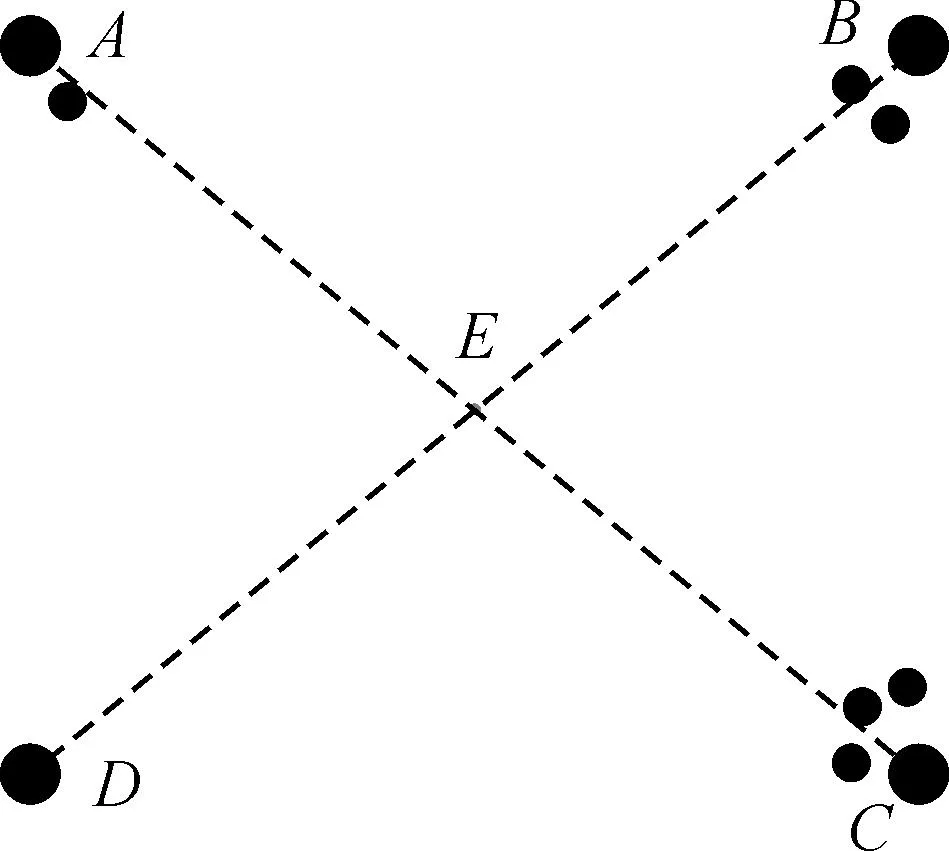
圖2 平面標靶
為了更好地描述本文的標定算法,在圖2中的平面標靶上加入了主要點的表示符號A—E,以及兩條對角線。其中A—D位于矩形的4個頂點,E為AC和BD的交點。A—E5個點主要用于計算平面標靶的平面方程、試驗平臺的平面方程及激光平面方程,而其余相對較小的點主要用于標記系統姿態。以主點周圍小點的數目0—3來表示4個方位,因此能夠方便地獲取掃描系統的位置姿態。
攝像機獲取平面標靶的圖像信息,求出標定板中的特征點,利用最小凸包算法求得本文所要使用的A—D4個主點,以及它們旁邊小點數目可以用來標記攝像機姿態。本文采用文獻[10]提出的幾何投影變換算法求解A—E5個點的空間坐標。
如圖3所示是一個平面標靶上特征點A、C、E的成像模型。E為AC的中點,O為攝像機光心,A′、C′、E′為A、C、E的投影點,其中E′是虛擬的,是平面標靶上A—D在投影平面上的投影A′C′與B′D′的相交位置點。需要通過兩直線相交的原理求出E′。設AE=CE=d,距離d的值已知,O到投影平面的距離即為焦距f,A′、C′、E′的坐標根據提取圖像特征點可以得知。設坐標A=t1·A′,C=t2·C′,E=t3·E′,因為E是AC的中點,可得出t3=(t1+t2)/2。因此根據透視投影幾何原理,可以得到
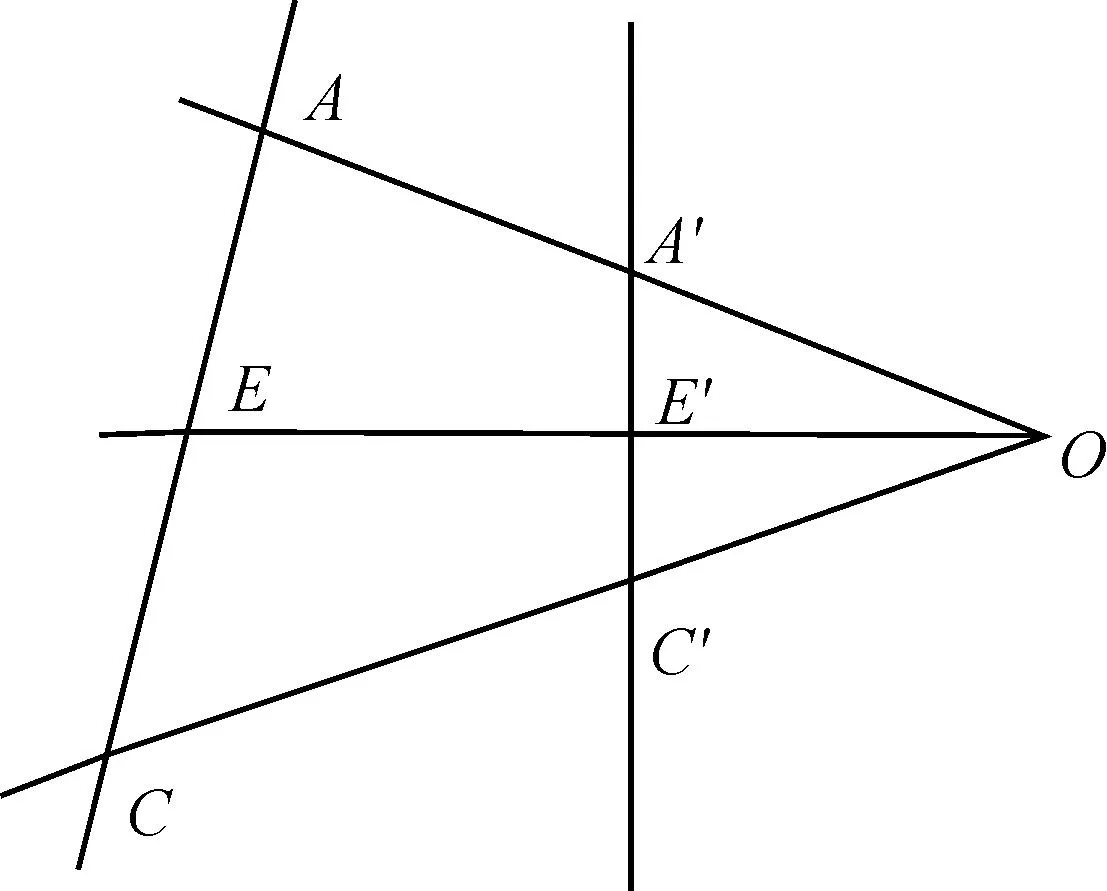
圖3 幾何投影變換
(1)
式(1)只有t1、t2、t3是未知的,因此3組方程加上1個輔助方程可以求出唯一解t1、t2、t3,又因為A=t1·A′,C=t2·C′,E=t2·E′, 因此可求出A、C、E3點相對于攝像頭中心原點的空間位置坐標值。同理求出B、D的空間位置坐標值。至此能夠計算出平面標靶上的4個主要點A—D相對于攝像機中心的空間坐標,因此利用空間4點最小二乘法平面擬合的算法求出平面標靶的方程。令空間平面方程為
Ax+By+Cz+1=1
(2)
由式(2)可以得出平面法向量n=(A,B,C)。設測量點Pi(xi,yi,zi),點Pi到擬合平面的有向距離為di=nPi+1,根據最小二乘法原理,S=∑di2要最小,因此用S分別對A、B、C求偏導,得出3組三元一次方程
(3)
由式(3)可以求出平面標靶的平面方程,記為方程F(P)。
3. 激光平面標定
在計算激光平面方程的時候,需要借助一個平臺,此平臺與平面標靶平行,平臺平面與平面標靶平面的距離為m已知,因此利用兩平面平行及已知其中一平面的方程和兩平面的距離可以求出另一個平面的方程[10],因此,由平面標靶平面方程F(P)和距離m可以求出平臺平面方程,記為方程F(P′)。激光平面的求解如圖4所示。
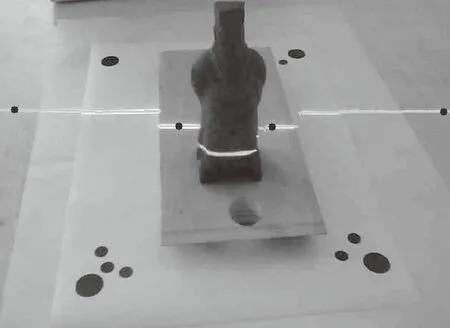
圖4 激光平面標定
在圖4中,激光條紋分別落在物體、平面標靶及輔助平臺上,在平面標靶和輔助平臺上分別找到激光條中心上的兩個點,如圖4中的光條上的4個黑色點,然后利用平面標靶的平面方程F(P)及輔助平臺平面方程F(P′)求出這4個點的空間三維坐標,最后利用式(2)、式(3)最小二乘法擬合平面的方法求出激光平面方程。為了能夠以很小的誤差求出激光平面方程,必須準確計算出光條中心點。
4. 半球空間內360°點云配準
三維旋轉和平移配準是本文的一個重要研究內容,因為要把所有三維坐標在一個坐標系下表示,因此假設攝像機初始位置的攝像機坐標系為世界坐標系,然后在攝像機和掃描儀移動過程中,將其他姿態下獲得的數據信息計算到世界坐標系,這就需要三維旋轉和平移配準。其中通過一次移動之間獲得的兩個標定板上的標定點,通過標定點之間的幾何關系,解方程組可求得平移和旋轉參數。本文采用姚吉利提出的一種方法——三點法計算轉換參數[11],轉換過程如下
(4)
式中,等號左側是目標坐標下的坐標;等號右邊(下標為S)為原坐標;λ為尺度因子,表示兩坐標系統上的單位大小之比;R為旋轉矩陣;[ΔXΔYΔZ]T為平移向量。
已知基本轉換過程及平面標靶平移旋轉前后兩次標定點A—D4個點的空間坐標,采用文獻[7]三點法計算轉換參數,即可計算出旋轉矩陣及平移矩陣。其中從4個標定點中取3個作為配準點,這樣能夠得到4組,把求解得到的結果求平均值。在此,以初始攝像頭中心位置為世界坐標系,之后在掃描移動過程中要把目標物體上的點云數據全部統一到世界坐標系下。
5. 攝像機標定
在三維掃描中,標定攝像機是一個不可缺少的關鍵因素。攝像機標定在計算機視覺研究領域占有十分重要的地位,是很多研究問題的前提,目的是計算出攝像機的內外參數。外部參數描述攝像機在外界空間中的方向和位置,內部參數主要描述攝像機本質的光學和幾何特性。通過構建相應的數學幾何模型,計算出世界坐標系與圖像坐標系之間的幾何映射模型,最后能夠高效地求解得到攝像機內外參值。常用的標定算法主要有張正友所設計的標定算法[12]和基于一階徑向畸變的Tsai標定算法[13-14]。這兩種標定過程比較難以控制,計算復雜,因此本文采用了文獻[10]設計的一種比較簡單易于控制的標定算法。此標定算法需要一個類似棋盤格性質的人工參照物,而本文所設計的簡易標定板正好適用于此算法的攝像機標定。
二、測量試驗與結果
上節描述了三維掃描的原理,根據這些掃描方法,在微軟的Windows 7操作系統下采用VS2008進行程序開發,開發語言是C/C++及OpenCV 2.4版本的圖像處理庫。采用羅技Pro9000攝像機及650 nm的5 mw一字線激光筆,自制平面標靶并構建試驗平臺。
1. 掃描過程
如圖5所示,掃描系統首先支在掃描物體的一個方向,然后手持激光器上下掃描物體,在物體上顯現激光條紋,攝像機拍攝含有激光條紋的目標對象。

圖5 三維掃描系統
接著對激光條紋中心點進行計算,求解光條中心的計算方法為灰度重心法[10,15-18],計算出光條在第k列的中心點,采用跟蹤法計算第k+1列,即在第k列中心點的基礎上的一定范圍內進行搜索。攝像機光心和提取的成像平面上光條紋中心的任一點可確定一直線,此直線與上節所求的激光器投射的激光平面相交于一點,利用已知直線方程和平面方程相交的幾何關系,求解得到的交點就是物體表面相應點的三維坐標值。
通過上述求解方法可以計算出待測量物體的表面三維坐標集合,設為點云P1{p1,p2, …}。然后將掃描系統變換到其他方位進行掃描,連續變換3次,得到物體表面三維坐標集合分別為點云P2{p1,p2, …},P3{p1,p2, …},P4{p1,p2, …},就可以在4個方位完成整個物體掃描。最后利用前面所介紹的點云配準,將P2、P3、P4經過平移旋轉到P1所在的坐標系下得到物體完整的點云數據,即可完成半球空間內360°點云數據配準,重建時對冗余數據進行處理即可。
2. 點云配準參數
RT1、 RT2、 RT3分別是逆時針旋轉平移3次后所求的旋轉平移矩陣,采用上小節的算法進行求取結果,所得到的結果如下
3. 系統掃描精度分析
在平面標靶上,AB=CD=236.5 mm,AD=BC=174.5 mm,在系統中主要用到的幾何投影變換方法得到的結果見表1,其中d1、d2、d3、d4表示AB、BC、CD、AD計算出來的長度,EA表示最大絕對誤差,ER表示最大相對誤差。

表1 投影變換法標定結果
表1中的3組標定數據,在距離45 cm處掃描最大絕對誤差為1.15 mm,相對誤差小于0.5%,標定點的精確度決定了整個系統的掃描精度。
4. 掃描結果
使用本文所述方法開發的三維掃描系統在室內掃描了一個兵馬俑模型。圖6是待掃描原始模型,圖7顯示掃描的結果,在位置1處顯示圖像共有14 879個數據點,在位置2處有13 765個數據點,在位置3處有13 843個數據點,在位置4有13 276個數據點。

圖6 原圖像
三、結束語
本文提出了一種基于簡易平面標靶的線激光三維掃描的姿態標定,以及利用標定板上的特征點計算三維坐標的完整方法,改進了標定板設計的復雜度及點云配準的難度。經過幾何投影變換求解平面標靶的平面方程的精度最大相對誤差小于0.5%,通過借用平面標靶與試驗臺這兩個平面,實現了一種快速的激光平面求解算法。利用平面標靶標定掃描系統的位置和姿態的方法,能夠簡單快速地進行半球空間內360°點云配準,具有很高的應用價值。試驗表明,在距離45 cm處掃描最大絕對誤差為1.15 mm,相對誤差小于0.5%,每幅圖像的處理時間少于60 ms,操作簡單,穩定可靠,并且使硬件成本大大降低,比較適合現場標定。

圖7 掃描結果圖像
參考文獻:
[1]周森,郭永彩,高潮.基于三維激光掃描的移動大尺寸圓柱體工件長度快速檢測系統[J].光學精密工程,2014,22(6): 1524-1530.
[2]勞達寶,楊學友,邾繼貴,等.掃描平面激光坐標測量系統校準方法的優化[J]. 光學精密工程,2011,19(4): 870-877.
[3]田慶國,葛寶臻,杜樸,等.基于激光三維掃描的人體特征尺寸測量[J]. 光學精密工程,2007,15(1):84-88.
[4]吳慶陽,李景鎮,蘇顯渝,等.線結構光三維測量系統中旋轉軸的標定方法[J].中國激光,2008,35(8):1224-1227.
[5]曾祥軍,霍金成,吳慶陽.線結構光三維測量系統掃描方向的標定[J].中國激光,2012,39(1):1-5.
[6]袁建英,郭進,王瑋,等.一種結構光三維掃描系統新標定方法[J].計算機應用與軟件,2013,30 (3):151-153.
[7]TIAN Qingguo, YANG Yujie, ZHANG Xiangyu,et al. An Experimental Evaluation Method for the Performance of a Laser Line Scanning System with Multiple Sensors [J]. Optics and Lasers in Engineering,2014, 52(1):241-249.
[8]LI Xudong, ZHAO Huijie, LIU Yang, et al. Laser Scanning Based Three Dimensional Measurement of Vegetation Canopy Structure[J]. Optics and Lasers in Engineering, 2014,54(1):152-158.
[9]EMAM S M, KHATIBI S, KHALILI K. Improving the Accuracy of Laser Scanning for 3D Model Reconstruction Using Dithering Technique[J]. Procedia Technology, 2014,12(1): 353-358.
[10]ZHANG Zhiyi, YUAN Lin. Build a 3D Scanner System Based on Monocular Vision[J]. Applied Optics, 2012,51(10):1638-1644.
[11]姚吉利.3維坐標轉換參數直接計算的嚴密公式[J].測繪通報,2006(5):7-10.
[12]ZHANG Z.A Flexible New Technique for Camera Calibration[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(11):1330-1334.
[13]TSAI R Y. An Efficient and Accurate Camera Calibration Technique for 3D Machine Vision[C]∥IEEE Conference on Computer Vision and Pattern Recognition. Miami Beach: [s.n.], 1986:364-374.
[14]TSAI R Y. A Versatile Camera Calibration Technique for High-accuracy 3D Machine Vision Metrology Using Off-the-shelf TV Cameras and Lenses[J]. IEEE Journal of Robotics and Automation,1987,3(4):323-344.
[15]LV Zhihua, ZHANG Zhiyi. Build 3D Scanner System Based on Binocular Stereo Vision[J]. Journal of Computers, 2012,7(2):399-404 .
[16]孫軍華,王恒,劉震,等. 鋼軌磨耗動態測量中激光光條中心的快速提取[J].光學精密工程,2011,19(3):691-694.
[17]王建文,杜春梅.激光三維掃描圖像處理改進算法[J].計算機工程與設計,2010.31(17):3929-3931.
[18]江潔,鄧玨瓊,張廣軍,等.光條紋中心的實時快速提取[J] .光學技術,2008,34(2):170-174.
中圖分類號:P237
文獻標識碼:B
文章編號:0494-0911(2016)02-0050-05
作者簡介:袁聰聰(1988—),女,碩士,研究方向為計算機圖形學。E-mail: 840386719@qq.com
基金項目:國家高技術研究發展(863)計劃(2013AA10230402);中央高校基本科研業務費西北農林科技大學科技創新項目(QN2013054)
收稿日期:2015-03-24
引文格式: 袁聰聰,張志毅. 簡易平面標靶下的三維掃描與數據配準[J].測繪通報,2016(2):50-54.DOI:10.13474/j.cnki.11-2246.2016.0047.