地面三維激光掃描儀的檢校與測量精度評定
2016-04-11 01:25:39徐壽志程鵬飛丁朋輝
測繪通報 2016年2期
徐壽志,程鵬飛,張 玉,丁朋輝
(1. 武漢大學測繪學院,湖北 武漢 430079; 2. 國家測繪產品質量檢驗測試中心,北京 100830;
3. 國家光電測距儀檢測中心,北京 100039; 4. 中國測繪科學研究院,北京100830)
?
地面三維激光掃描儀的檢校與測量精度評定
徐壽志1.3,程鵬飛2,張玉4,丁朋輝3
(1. 武漢大學測繪學院,湖北 武漢 430079; 2. 國家測繪產品質量檢驗測試中心,北京 100830;
3. 國家光電測距儀檢測中心,北京 100039; 4. 中國測繪科學研究院,北京100830)
Calibration and Accuracy Evaluation of Terrestrial Laser Scanner
XU Shouzhi,CHENG Pengfei,ZHANG Yu,DING Penghui
摘要:針對地面三維激光掃描儀的測量精度評定問題,提出了利用比長基線檢定場進行測距精度評定,利用多齒分度臺進行水平角精度評定,利用室內檢校場進行垂直角和點位精度評定。采用比長基線檢定場方法,每個觀測點布設穩固,且有強制對中裝置,能夠較好地減少其他誤差的影響。采用多齒分度臺利用全圓組合比較法進行水平角精度評定,該方法所用的角度標準器精度高,可溯源。基于Riegl VZ-1000的試驗結果表明,本文所提出的方法對地面三維激光掃描儀進行性能評定可靠性好、穩定性強,對地面三維激光掃描儀的檢校研究具有一定的參考和應用價值。
關鍵詞:地面三維激光掃描儀;精度評定;測距;測角;點位
三維激光掃描技術具有實時、動態、高速度、高密度、高精度、數字化、自動化、非接觸和可量測等優點,是目前國際上獲取三維空間數據最先進的測量技術之一。三維激光掃描系統按不同的搭載平臺主要可分為星載激光掃描系統、機載激光掃描系統、車載激光掃描系統和地面激光掃描系統。地面三維激光掃描儀(terrestrial laser scanner, TLS)是地面激光掃描系統的主要組成部分,目前TLS的精度指標都是由儀器生產廠商提供,該精度是否符合要求是未知的。此外,長期使用后的硬件老化和磨損等因素都會不同程度影響掃描精度,因此對TLS的各項性能指標進行精度評定顯得十分必要。TLS由于出現時間較晚,結構復雜,如何對不同生產廠商的儀器進行性能評定,目前還沒有統一的標準與規范。文獻[1]分別利用六段解析法和間接平差法對TLS的測距和測角進行了檢校;文獻[2]利用平均調制傳遞函數(AMTF)模型對點云的角度分辨率進行了精度評定;文獻[3]利用B?hler-Sterne鑒別率板對TLS的鑒別率進行了評定;文獻[4]分析了TLS的測距誤差源,并根據反射強度建立TLS測距誤差改正模型以減少測距誤差;文獻[5]利用自制裝置對TLS的測距不確定度進行了評定;文獻[6]和文獻[7]分別利用自檢校方法對TLS的系統誤差進行了參數估計;文獻[8]利用球形靶標對TLS進行不確定度評定。目前對于TLS的測量精度評定大多是從某一方面進行評定[9-11]。鑒于此,本文提出利用比長基線檢定場進行測距精度評定,以可溯源的多齒分度臺進行水平角精度評定,利用室內檢校場進行垂直角精度和點位精度評定。
一、地面三維激光掃描儀測量原理
TLS由三維激光掃描儀、數碼相機(可選)、自帶軟件、電源和其他附件組成。目前市場上主流的TLS測量方式有脈沖式和相位式,其工作原理是由激光脈沖二極管發射出激光脈沖信號,通過旋轉棱鏡的轉動,實現對目標的橫向和縱向掃描,然后通過探測器,接收并記錄反射回來的激光脈沖,從而獲取目標點的三維坐標。其測量原理是:通過傳播時間或相位變化來測量距離S,通過儀器內的精密時鐘控制編碼器獲取激光束的水平角φ和垂直角θ。TLS采用儀器自定義的坐標系統:X軸在橫向掃描面內,Y軸在橫向掃描面內與X軸垂直,Z軸與橫向掃描面垂直構成右手坐標系,坐標原點為儀器的掃描中心。由此可以得到點位坐標的計算公式
(1)
由式(1)和誤差傳播定律可以導出點位坐標分量誤差及點位坐標誤差
(2)
從式(2)可以看出,距離、水平角、垂直角的測量精度直接影響點位精度,掃描的距離、水平角、垂直角的數值大小也對點位坐標誤差分量及點位坐標誤差有著不同程度的影響。
二、地面三維激光掃描儀的精度評定
TLS的測距精度、測角精度和點位精度決定了其基本測量性能。本文結合TLS本身的特點,提出了相應的方法對TLS性能指標進行精度評定。
1. 測距精度
文獻[1]利用六段解析法解算出了TLS的測距加常數,然后再進行精度評定。該方法得到的是利用測距加常數改后的測距精度,不是儀器本身實際的測距精度。本文采用經國家鑒定的測繪儀器比長基線檢定場作為長度基準(基線場總長1080 m,相對精度為0.36×10-6),對TLS實際測距精度進行評定。
比長基線檢定場如圖1所示,其中L4-5=192.082 10 m,L5-6=72.046 99 m。評定方法如下:選擇基線場的兩條相鄰基線邊作為基準邊,利用掃描儀對已知基線邊進行距離測量,最后進行測量結果比對。評定過程:在基線場的5號點安置TLS,并對中整平,然后分別在4號點和6號點安置TLS的專用標靶,同時對中整平,注意靶標的高度盡量與掃描儀的高度一致,避免垂直角誤差的影響,控制TLS對標靶進行30次重復掃描,利用配套數據處理軟件獲取兩者之間的斜距,根據標準差公式計算測距重復性,根據均方根誤差公式計算測距精度。

圖1比長基線檢定場示意圖
在計算測距精度時,因為
TLS
提供的距離值D
i
是斜距,而標準值D
0
是平距,因此需要將斜距轉化為平距,按照公式D
s
=D
i
sin
θ進行計算,θ為垂直角。其部分測距觀測結果見表1。
本文測試使用的RieglVZ-1000 192m測距重復性為0.000 9m,測距精度為0.001 7m;72m測距重復性為0.001 1m,測距精度為0.001 2m。

表1 TLS 192 m和72 m部分測距觀測值
利用比長基線場進行測距精度評定,該方法基線場每個觀測點布設穩固,且有強制對中裝置,能夠較好地減少其他誤差的影響。因此,利用該方法進行測距精度評定精度高、可靠性強。
2. 測角精度
TLS與全站儀在角度觀測方式上有著本質的區別,TLS不能通過盤左盤右來消除視準軸誤差,而且儀器本身也不具備瞄準和單點掃描的功能,因此需要借助于專用靶標。TLS每個掃描點包含兩個角度,即水平掃描角和垂直掃描角,需要分別對它們進行精度評定。
(1) 水平角精度
文獻[9]采用Leica T3000電子經緯儀對布設在墻面上的人工標志進行水平角測量,以此提供角度基準,進而進行精度標定。本文采用多齒分度臺進行TLS水平角的精度標定,借鑒了全站儀和電子經緯儀一測回水平方向標準差檢定方法中的比較法,即利用多齒分度臺作為角度標準器,與TLS靶標測量獲取的角度觀測值進行比較。
多齒分度臺(如圖2(a)所示)是一種高準確度的圓分度標準器件,一般由齒數和模數相同的兩個齒盤組成。使用時,一個齒盤固定,另一個齒盤可與之脫開,旋轉到所需角度后嚙合,從而達到定位和高分度的目的。筆者采用的是552齒的多齒分度臺,其最大誤差為0.3″。
評定方法如下:①將多齒分度臺精確調平,然后將Riegl VZ-1000連同基座固定安置到平臺上并調平(如圖2(b)所示);②在距掃描儀約50 m處安置專用靶標;③將多齒分度臺置于零位,每次順時針旋轉一定的角度,掃描儀也跟著旋轉同樣的角度,旋轉完成后掃描儀對靶標進行掃描,提取靶標中心和水平角度值。
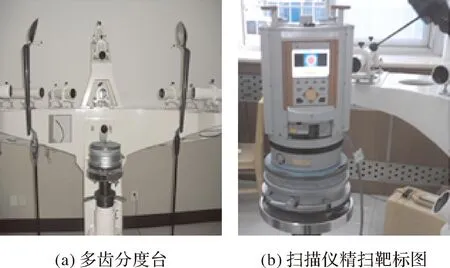
圖2
多齒分度臺旋轉360°稱為一個測回,一般至少需要測量兩個測回,回零讀數不參與水平角標準偏差計算,其水平角部分觀測結果見表2。
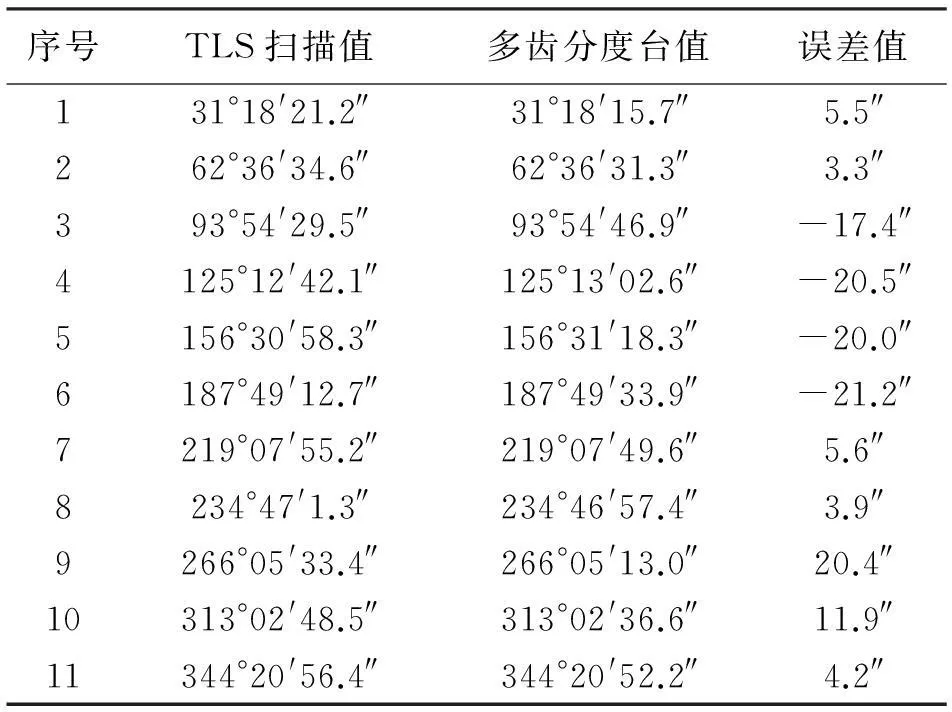
表2 多齒分度臺法一測回水平方向觀測值
水平方向誤差按式(3)計算
(3)
式中,αij為各測點標靶測量方向與零方向的角度值;α標j為第j個角度的多齒分度臺標準角度值;i表示第i測回;j表示第j測點。
水平角標準差計算公式為
(4)
本文測試使用的Riegl VZ-1000水平角精度σφ=15.57″。
該方法借助多齒分度臺作為角度基準,通過設置二者剛性同軸,通過全圓組合比較法進行了水平角精度評定。該方法所用的角度標準器精度高,可溯源。
(2) 垂直角精度
垂直角的精度評定是利用Sokkia NET05全站儀對布設在室內墻面上的多個分布在一條垂直線上的專用靶標進行垂直角度測量(如圖3所示),從而提供垂直角度基準,該方法也叫多目標法。

圖3 測定垂直角精度的室內靶標分布圖
評定方法如下:①將全站儀安置在升降工作臺上,同時量取全站儀儀器高,然后利用全站儀從上往下依次觀測靶標的中心,并記錄其垂直角度方向值;②卸下全站儀,將掃描儀安置在升降工作臺上,調節升降平臺使得掃描儀的幾何中心高度與全站儀的儀器高一致,然后自上而下依次照準標靶,掃描完成后提取出角度方向值,至少需掃描2個測回;③將垂直角度方向值兩兩相減得到垂直角,垂直角的標準差計算公式同水平角標準差計算公式,按式(3)、式(4)計算。其垂直角度值見表3。
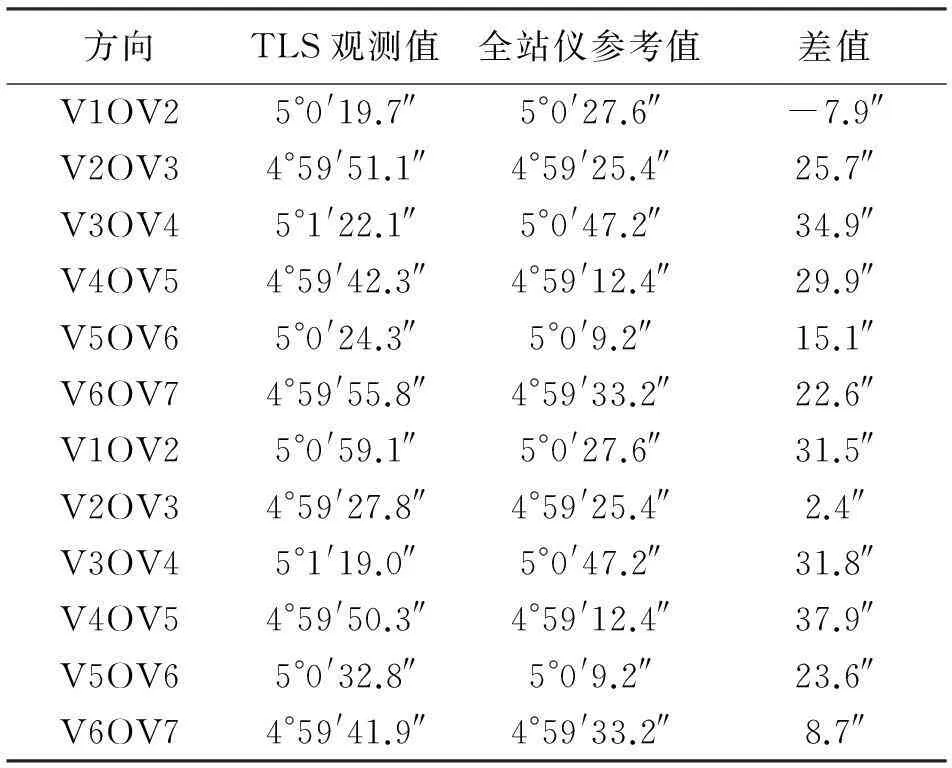
表3 TLS垂直角度值
本文測試使用的Riegl VZ-1000垂直角精度σθ=14.77″。
垂直角精度與水平角精度相當,表明利用多目標法進行垂直角精度評定是有效、可行的。該方法需要注意的是測量過程必須保持TLS的幾何中心高度與全站儀的儀器高一致。
3. 點位精度
TLS的點位精度直接決定點云數據的質量,因此對點位進行精度評定顯得尤為重要。本文采用室內檢校場方法,即在室內檢校場墻面上布置一系列的專用靶標。評定方法如下:①首先將全站儀安置在升降平臺上,量取儀器高,然后利用Sokkia NET05全站儀通過后視定向測量出所有的專用靶標坐標,全站儀的測站坐標設定為(100.0,100.0,100.0);②卸下全站儀安置TLS,調節升降平臺使得TLS儀器幾何中心與全站儀的儀器高一樣,測站坐標也設定為(100.0,100.0,100.0),然后瞄準同樣的后視點進行后視定向,控制TLS對室內檢測場進行高密度單站掃描,利用后處理軟件獲得標靶中心坐標。點位精度計算公式為
σcoord=
(5)
式中,(Xi,Yi,Zi)為TLS掃描的點位坐標;(Xi0,Yi0,
Zi0)為全站儀測量坐標;n為靶標個數。
室內檢校場的每個墻面均勻布設5個專用靶標(如圖4所示),TLS按順時針(或逆時針)對靶標進行掃描,其測量結果見表4。

圖4 室內專用靶標分布圖(黑色圓點)
本文測試使用的RieglVZ-1000的點位精度σcoord=0.004 3m。點位的精度受距離的影響較大,RieglVZ-1000短距離點位精度可以達到毫米級,室外的測試表明,RieglVZ-1000長距離點位精度可以達到厘米級。
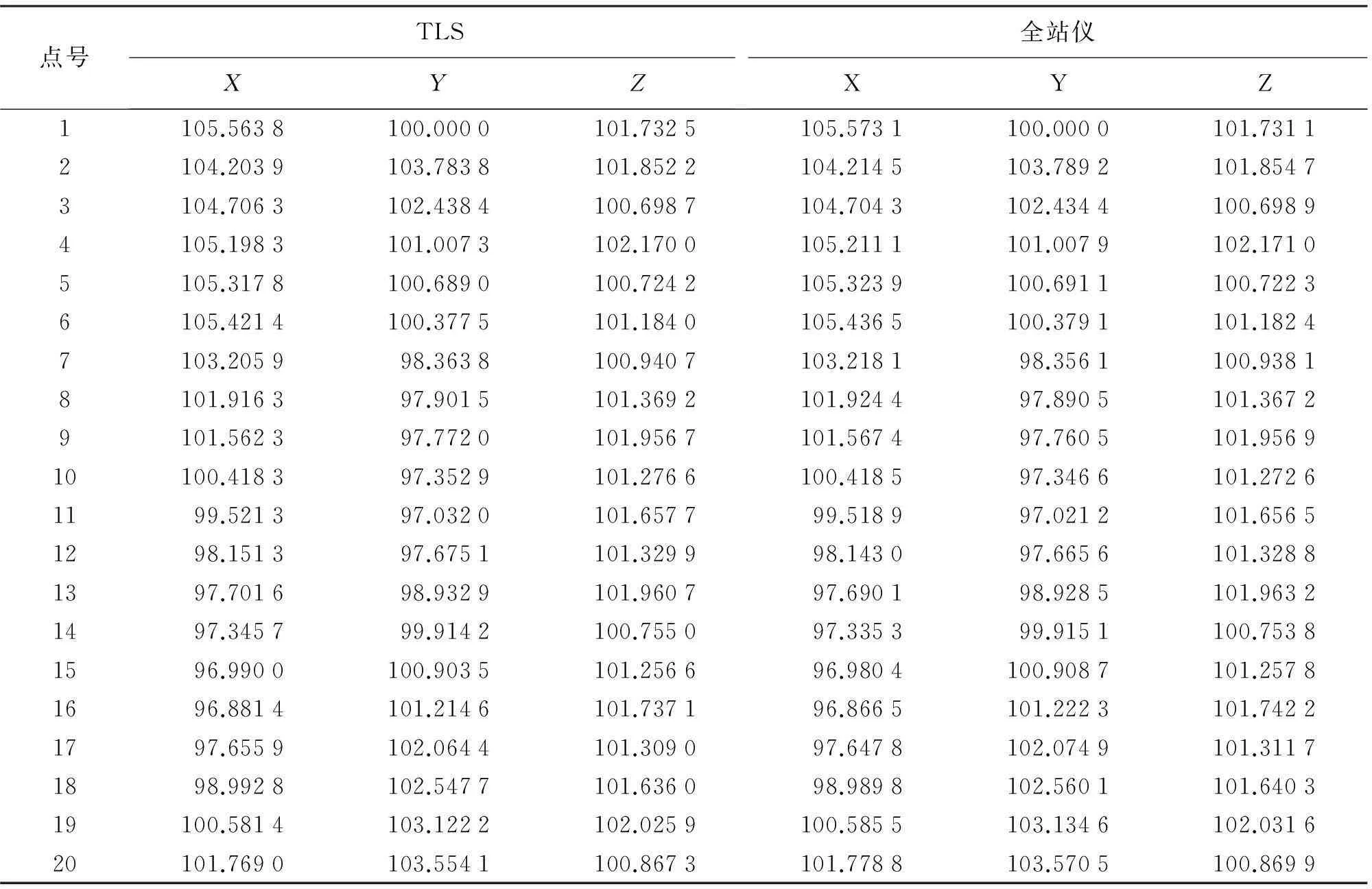
表4 TLS點云觀測數據
三、結果和討論
從Riegl VZ-1000的評定結果可以看出,其測距精度和測距重復性符合廠家給出的精度要求(見表5)。Riegl VZ-1000的實際測量距離達到1000 m以上,廠家給出的標稱精度為100 m的測距精度,因此本文選擇192 m和72 m兩個標準長度進行測距精度評定。另一方面,由于隨著距離的增大,點云密度受地面三維激光掃描儀發散角的影響就越明顯,點云密度越小,選點相對比較困難。另外,廠家并沒有給出測角標稱精度,本文得到的測角精度為15″左右。將測距精度和測角精度代入式(2)得到Riegl VZ-1000理論點位精度為0.001 8 m,與實際點位精度0.004 3 m有一定的差異,可能是由于靶標中心擬合誤差影響所致。
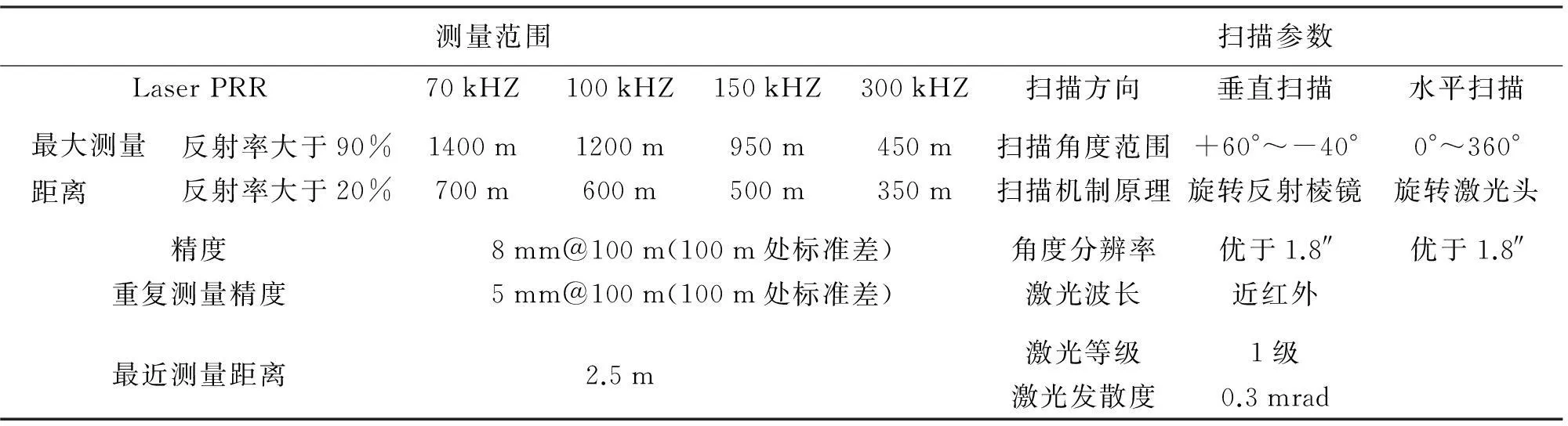
表5 Riegl VZ-1000 主要技術參數
四、結束語
TLS主要用于三維建模和虛擬現實,以及生成基于點云的可量測影像。作為獲取三維空間信息的高新技術,其儀器性能的優劣決定了測量成果的好壞,其測量精度也直接決定它的應用領域和應用范圍,因此對其進行測量性能評定至關重要。本文以Riegl VZ-1000為例,從測距精度、測角精度、點位精度對其進行了性能評定。此外,點云的配準精度、點云的建模精度將是下一步的研究工作。本文的主要結論為:
1) 通過高精度的比長基線檢定場進行TLS測距精度評定,該方法操作簡單、省時、省力、精度高、可溯源。
2) 多齒分度臺可以用于TLS的水平角精度評定,該方法無需布設多個目標點,精度高、穩定性好、可溯源。
3) 可以利用室內檢校場通過坐標已知的多個靶標進行點位精度評定。
4) Riegl VZ-1000測距精度1~2 mm,符合標稱精度;測角精度15″左右;點位精度可以達到毫米級,其受距離的影響較大。
參考文獻:
[1]劉春,張藴靈,吳杭彬.地面三維激光掃描儀的檢校與精度評估[J].工程勘察,2009(11):56-60.
[2]陳西江,花向紅,邱衛寧,等.點云角度分辨率精度評定[J].武漢大學學報(信息科學版),2013,38(9):1044-1047.
[3]王守國.地面激光掃描儀鑒別率檢定方法的研究[J].測繪通報,2011(6):45-47.
[4]趙松,西勤,劉松林,等.基于回光強度的地面三維激光掃描儀測距誤差模型[J].測繪科學,2013,38(3):169-174.
[5]POLO M, FELICISIMO A M, VILLANUEVA A G, et al. Estimating the Uncertainty of Terrestrial Laser Scanner Measurements[J]. IEEE Transactions on Geoscience and Remote Sensing,2012,50(11):4804-4808.
[6]LICHTI D D. Terrestrial Laser Scanner Self-calibration: Correlation Sources and Their Mitigation[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2010, 65(1): 93-102.
[7]RESHETYUK Y. An Unified Approach to Self-calibration of Terrestrial Laser Scanners[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2010, 65(5): 93-102.
[8]PAREJA T F, PABLOS A G, OLIVA J V Y. Terrestrial Laser Scanner (TLS) Equipment Calibration[J]. Procedia Engineering, 2013(63):278-286.
[9]張啟福.地面三維激光掃描儀性能測試方法研究[D].鄭州:信息工程大學,2012.
[10]王玉鵬,盧小平,葛曉天,等.地面三維激光掃描點位精度評定[J].測繪通報,2011(4):10-13.
[11]張永彬,高祥偉,謝宏全,等.地面三維激光掃描儀距離測量精度試驗研究[J].測繪通報,2014(12):16-19.
中圖分類號:P237
文獻標識碼:B
文章編號:0494-0911(2016)02-0079-05
作者簡介:徐壽志(1986—)男,博士生,主要從事車載移動測量系統的檢校及理論研究。E-mail:xsz2011@whu.edu.cn
基金項目:測繪地理信息公益性行業專項(201512010)
收稿日期:2015-11-06
引文格式: 徐壽志,程鵬飛,張玉,等. 地面三維激光掃描儀的檢校與測量精度評定[J].測繪通報,2016(2):79-83.DOI:10.13474/j.cnki.11-2246.2016.0054.
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08