IGS實時服務的車載動態偽距差分定位精度分析
2016-04-11 01:25:37王高靖史俊波李宗華郭際明彭明軍
測繪通報 2016年2期
王高靖,史俊波,李宗華,郭際明,彭明軍,高 山
(1. 武漢大學測繪學院,湖北 武漢 430079; 2. 武漢市國土資源和規劃局,湖北 武漢 430014;
3. 武漢市國土資源和規劃信息中心,湖北 武漢 430014)
?
IGS實時服務的車載動態偽距差分定位精度分析
王高靖1,史俊波1,李宗華2,郭際明1,彭明軍3,高山3
(1. 武漢大學測繪學院,湖北 武漢 430079; 2. 武漢市國土資源和規劃局,湖北 武漢 430014;
3. 武漢市國土資源和規劃信息中心,湖北 武漢 430014)
Accuracy Analysis of GPS Code-based Vehicle Positioning Based on IGS Real-time Service
WANG Gaojing,SHI Junbo,LI Zonghua,GUO Jiming,PENG Mingjun,GAO Shan
摘要:IGS于2013年4月正式發布針對GPS/GLONASS廣播星歷的實時改正數產品,進一步擴展了實時精密定位的應用領域。目前對IGS實時改正數的研究主要集中在精密單點定位、GPS氣象等方面,還沒有動態差分定位方面的研究。本文首先分析了IGS實時軌道和時鐘改正數的精度,然后對其用于車載動態偽距差分定位的精度進行了研究。試驗結果表明,IGS實時軌道精度可以達到5 cm,時鐘精度在0.5 ns以內;使用IGS實時服務的車載動態偽距差分定位平面精度可以達到亞米級,高程精度優于1.5 m。
關鍵詞:IGS實時服務;軌道精度;時鐘精度;車載動態偽距差分定位
自1994年以來,IGS為全球GNSS用戶提供精密衛星軌道、時鐘產品。但IGS精密產品有一定的時延,其中,最終星歷需要13 d,快速星歷需要7 d,這限制了一些高精度(近)實時的應用[1-3]。2013年4月1日,IGS實時服務(real-time service,RTS)正式提供針對GPS/GLONASS廣播星歷(衛星軌道和時鐘誤差)的改正數據。IGS官方聲明(http:∥rts.igs.org/)和已有研究表明,IGS實時改正數的軌道精度為4~8 cm,鐘差精度為0.2~0.8 ns[4-5]。
目前對于IGS RTS的研究集中在精密單點定位和GPS氣象方面,研究結果表明,實時改正數可以滿足精密單點定位的精度要求[6],也可以滿足水汽監測應用的需求[7]。但是,目前還沒有動態差分定位方面的研究。因此,研究IGS實時改正數在車載動態差分定位應用(如交通測速和車載導航)中的定位性能,具有很好的實用價值。本文首先以IGS最終星歷為參考,分析了實時軌道和鐘差改正數的精度,然后對IGS實時改正數用于車載動態偽距差分定位的定位精度進行了研究。試驗結果表明,使用IGS實時改正產品的車載偽距差分可以達到平面亞米級和高程優于1.5 m的精度。
一、IGS實時軌道和鐘差改正數
1. 軌道改正數
IGS實時改正數的軌道改正數是對衛星軌道在星固系下徑向、切向和法向的改正值(下文中的dR、dA、dC)[8],而用戶所需的衛星位置是在地固系中的坐標。因此需要先將改正數從星固系轉換至地固系,然后對廣播星歷計算出的地固系坐標進行改正。
首先,由衛星位置和速度計算出衛星相對地心在切向、法向和徑向上的單位向量eA、eC、eR
(1)
式中,Vsat和Xsat分別表示衛星在WGS-84地固坐標系中的瞬時速度和坐標。
然后,將星固坐標系的分量投影到WGS-84坐標系中
(2)
式中,dx、dy、dz分別表示dR、dA、dC在X、Y、Z方向上的投影值;eR、eA、eC為單位正交向量。
最后,使用式(2)中得到的衛星軌道在地固系下的改正數dX對廣播軌道進行改正,即可獲得實時衛星精密軌道坐標
Xsat=XBRDC-dX
(3)
式中,XBRDC為使用廣播星歷計算的衛星位置[9];Xsat為最終得到的精密軌道。
2. 鐘差改正數
實時鐘差改正公式如下
Tsat=TBRDC+Δt/c
(4)
式中,TBRDC為廣播星歷算出的鐘差;Δt為實時產品中對廣播星歷鐘差的改正數;c為光速;Tsat為修正后的實時精密衛星鐘差。
二、算例與分析
1. 動態數據采集
本算例采用司南K505接收設備進行車載動態數據采集,沿著南寧市雙擁路、青山路、鳳嶺南路,經過龍崗大橋、五象大道和五象大橋,最后返回起點,共分為3個時段,如圖1所示。實線為第1個時段,從市區到郊區;寬虛線為第2個時段,主要在郊區;短虛線為第3個時段,從郊區回市區。
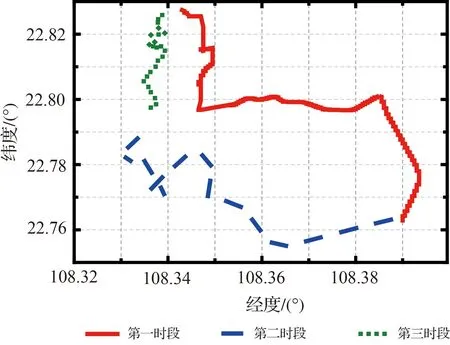
圖1 數據采集路線
2. 衛星軌道和鐘差精度
由于IGS有多個分析中心,每個分析中心都可以提供實時產品,本文在研究中選擇衛星鐘差改正數最穩定的分析中心(CNES)發布的產品,在下文簡稱為CNT。以IGS最終星歷為參考,分析各個時段中可視衛星的軌道和鐘差精度。計算公式為
(5)
式中,Ri表示每個歷元數值與真值之差;n表示觀測時段的歷元數。
圖2顯示了3個時段中所有可視衛星的軌道和鐘差RMS,每張圖代表1個時段,柱狀圖表達軌道信息,折線圖表達鐘差信息。3個時段的軌道RMS基本相同,RMS最大值不超過8 cm,大部分衛星的軌道RMS均小于5 cm。在分析鐘差精度時,采取二次差法[10-13]。從圖中可以看出,3個時段的衛星鐘差在0~1.3 ns內波動,大部分衛星的時鐘RMS在1 ns之內,平均鐘差RMS在0.5 ns以內。
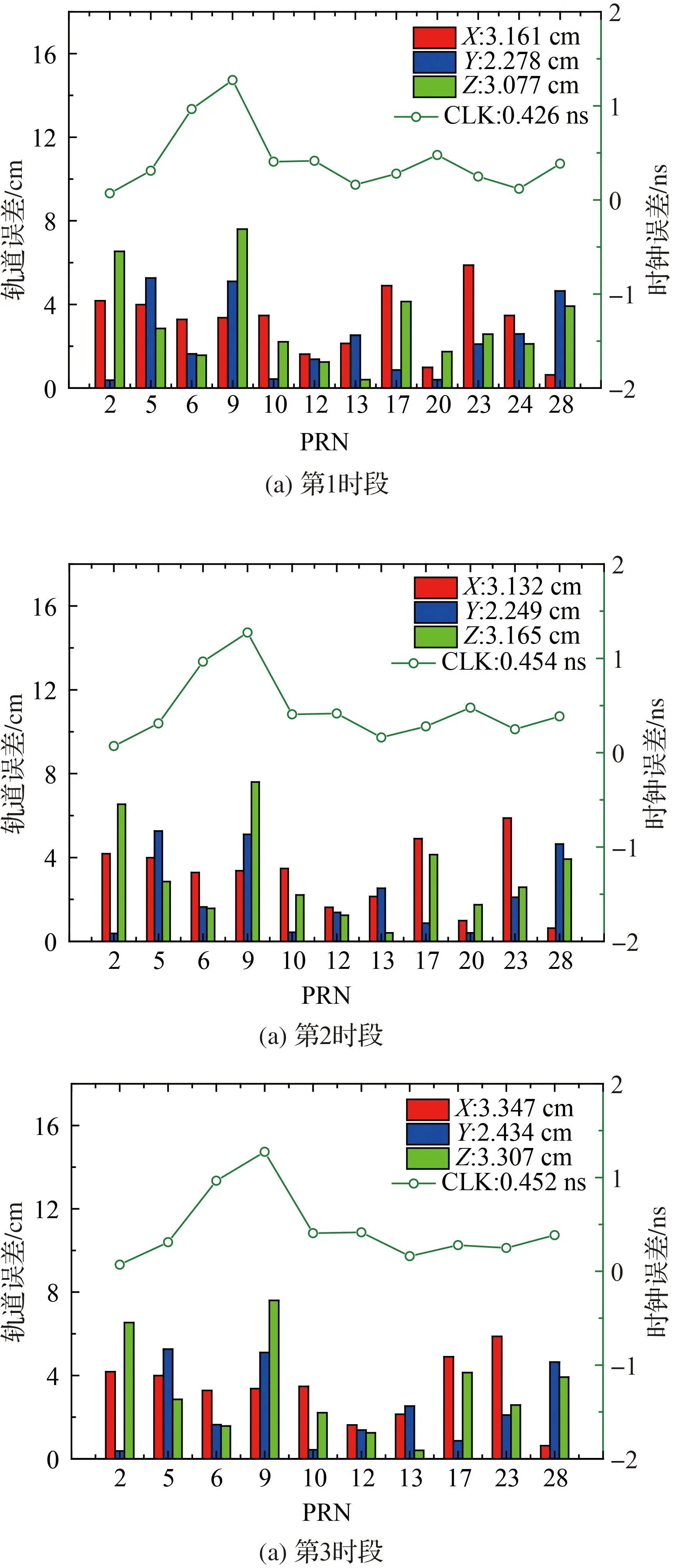
圖2 軌道/時鐘誤差
3. 實時改正數用于車載偽距差分定位
以商用軟件GrafNav的載波相位固定解作為真值,分析車載偽距差分定位精度。圖3顯示了第1時段的可用衛星數、位置精度因子(position dilution of precision,PDOP)、平面誤差和高程誤差。從第1時段看,可視衛星數并不穩定,因為第1時段時汽車由城內開往城外,周圍建筑物較多。隨著汽車開出城市,可用衛星數大于6顆,PDOP值小于2,平面和高程定位誤差變小。總體上,平面RMS為0.638 m,高程為1.243 m。
表1給出了3個時段偽距差分定位的平均可用衛星數、平均PDOP、平面和高程定位精度。第2時段中,平均可用衛星數明顯增多,且PDOP值小于2。這是由于該時段位于郊區,觀測環境好。該時段精度最高,平面為0.608 m,高程為1.019 m。第3時段是從郊區開回市區,觀測環境變差,平均可用衛星數減少,且PDOP值大于2。該時段精度最差,平面為0.768 m,高程為1.301 m。
三、結束語
本文首先以IGS最終星歷為基準,對3個測段中可視衛星的實時軌道和時鐘改正數的精度進行了分析:實時軌道精度在5 cm以內,時鐘精度在0.5 ns以內。其次對實時改正數用于車載偽距差分定位的精度進行了分析。結果表明,使用實時改正數進行車載動態偽距差分定位,可以達到平面亞米級和高程優于1.5 m的定位精度。
本文研究僅限在5~7 km的短基線。對于短基線,星歷誤差可以通過差分削弱對定位結果的影響。但已有研究表明,隨著基線長度的增加,星歷精度對差分定位精度的影響越來越大。因此,今后的工作將會研究實時改正數用于長基線動態差分定位的精度性能。
參考文獻:
[1]賴允斌,趙春梅,李子申. 不同星歷下實時精密單點定位精度分析[J].測繪通報,2015(9):9-12.
[2]徐愛功,徐宗秋,隋心. 衛星軌道與鐘差對精密單點定位精度的影響[J].測繪通報,2013(5):1-4.
[3]于興旺,張小紅,郭菲,等. 基于精密星歷的GPS/GLONASS 組合單點定位研究[J].測繪信息與工程,2009,34(2):3-4.
[4]尹倩倩,樓益棟,易文婷. IGS實時產品比較與分析[J].大地測量與地球動力學,2012,32(6):123-128.
[5]HADAS T, BOSY J. IGS RTS Precise Orbits and Clocks Verification and Quality Degradation over Time[J]. GPS Solutions, 2015,19(1): 93-105.
[6]GAO Yang, CHEN Kongzhe. Performance Analysis of Precise Point Positioning Using Real-time Orbit and Clock Products [J].Journal of Global Positioning Systems, 2004,3(1-2): 95-100.
[7]王敏,柴洪洲,謝愷,等. 基于CNES實時軌道鐘差數據反演大氣可降水量[J].大地測量與地球動力學,2013,33(1):137-140.
[8]BKG Ntrip Client (BNC) Version 2.5 Manual [M]. Federal Agency for Cartography and Geodesy,Frankfurt,Germany, January 2011.
[9]劉偉平,郝金明,李作虎. 由廣播星歷解算衛星位置速度及精度分析[J].大地測量與地球動力學,2010,30(2):144-147.
[10]李顯,吳美平,張開東. 導航衛星速度和加速度的計算方法及精度分析[J].測繪學報,2012,41(6):816-824.
[11]高周正,章紅平,彭軍還. GPS衛星星歷精度分析[J].測繪通報,2012(2):1-4.
[12]樓益棟. 導航衛星實時精密軌道與鐘差確定[D]. 武漢:武漢大學,2008.
[13]高成發,沈雪峰,汪登輝,等. 基于區域CORS的實時精密衛星鐘差估計研究[J].導航定位學報,2013,1(1):40-46.
中圖分類號:P228
文獻標識碼:B
文章編號:0494-0911(2016)02-0072-03
作者簡介:王高靖(1991—),男,碩士,主要研究方向為GNSS實時定位。E-mail: jbshi@sgg.whu.edu.cn
基金項目:數字城市聯合實驗室項目(2014SL02)
收稿日期:2015-03-11
引文格式: 王高靖,史俊波,李宗華,等. IGS實時服務的車載動態偽距差分定位精度分析[J].測繪通報,2016(2):72-74.DOI:10.13474/j.cnki.11-2246.2016.0052.