基于廣義偽衛星的新一代GNSS增強系統
2016-04-11 01:25:21朱祥維李井源聶俊偉
測繪通報 2016年2期
朱祥維,徐 博,李井源,聶俊偉,歐 鋼
(國防科技大學電子科學與工程學院,湖南 長沙 410073)
?
基于廣義偽衛星的新一代GNSS增強系統
朱祥維,徐博,李井源,聶俊偉,歐鋼
(國防科技大學電子科學與工程學院,湖南 長沙 410073)
New Generation GNSS Augmentation System Based on Generalized Pseudolite
ZHU Xiangwei,XU Bo,LI Jingyuan,NIE Junwei,OU Gang
摘要:針對GNSS系統在可用性、安全性和完好性等方面的不足,在對偽衛星使用模式和關鍵技術進行系統歸納梳理的基礎上,提出了廣義偽衛星的概念和基于廣義偽衛星的新一代GNSS增強系統框架。通過新設計的偽衛星體制,可以實現信號層、信息層和通信能力的全面增強,并將偽衛星的應用范圍拓展至各類載體平臺,實現了衛星導航信號的增強和延伸,提升了衛星導航系統的可用性、安全性、完好性和精確性。結合偽衛星的應用,本文提出了廣義偽衛星的兩種物理實現架構和組網同步模式,為廣義偽衛星的推廣應用奠定了技術基礎。
關鍵詞:衛星導航;偽衛星;增強系統;時間同步;遠近效應
偽衛星的概念最早于20世紀70年代提出[1],主要是為了對GPS系統的測距方法和原理進行驗證。伽利略衛星系統設計時也使用了偽衛星來驗證頻率分配與用戶設備[2]。偽衛星技術是伴隨著GNSS建設應用發展起來的,已經獲得了廣泛應用[3]。除了測試驗證GNSS系統原理和性能外,偽衛星還能夠在可見導航衛星數目不足的情況下起到替代導航衛星的作用,提升整個系統的可用性和完好性[4]。在室內、洞穴等極端環境中,偽衛星甚至可以完全取代導航衛星星座。在干擾環境下,通過偽衛星功率增強可以提升用戶機的抗干擾能力和導航戰能力。
近期偽衛星技術再度成為研究熱點。文獻[5—7]對GNSS環境下的偽衛星信號進行了多方面的研究,包括偽碼生成、載波頻率和信號功率等;文獻[8]對偽衛星應用中的多徑問題進行了研究和測試;文獻[9]重構了一個高精度GNSS/偽衛星混合星座仿真平臺;文獻[10]給出了偽衛星之間的一種時鐘同步算法;文獻[11]提出了一種高精度的偽衛星天線校準技術;文獻[12]提出了一種基于可移動接收機天線和單個偽衛星的室內定位算法。可以看出,目前關于偽衛星的研究主要集中在幾個方面:發掘新的應用場景和應用模式,對新的偽衛星技術進行性能評估,解決偽衛星技術存在的關鍵性難題,如時鐘同步、多徑效應和遠近效應等。
本文將對偽衛星應用模式和關鍵問題進行全面梳理,在此基礎上提出基于廣義偽衛星的北斗系統增強框架,并提出偽衛星應用中的兩種組網模式和兩種實現架構,為后續偽衛星推廣應用奠定技術基礎。
一、偽衛星定位的工作模式
偽衛星的應用主要可以分為兩大類:
1) 偽衛星輔助定位。偽衛星可以提供導航信息,彌補GNSS衛星數目的不足,對GNSS的輔助增強改善了定位系統的可靠性和完好性。
2) 偽衛星獨立定位。在環境十分惡劣的情況下,導航衛星可能完全不可見,這時可以采用若干顆偽衛星組成導航星座,獨立地進行導航和定位。
1. 偽衛星輔助GNSS模式
偽衛星增強信號可以由空基平臺發送。空基偽衛星(APL)已經被測試用于軍事應用,如圖1(a)所示[13]。與GPS類似,為軍事應用研發的APL,也可以使民用定位與導航受益。2000年4月進行的APL(偽衛星放置在高空無人機平臺)抗干擾試驗表明,偽衛星不僅能提供足夠的定位精度,而且可以保證自身不被惡意干擾[14]。
在臨近空間平臺偽衛星應用方面,文獻[15]中提出了一種基于飛船的偽衛星平臺,如圖1(b)所示。飛船將被部署在海拔20 km的高空,這樣偽衛星與用戶之間的分隔距離大約為20~70 km。相比地面偽衛星,這種部署下遠近效應不再是一個嚴重問題。
在LEO增強GNSS方面,高完好性GPS(high integrity GPS,iGPS)通過集成銥星通信系統,用銥星LEO發射大功率增強信號,提供iGPS接收機更高的完好性和抗干擾能力,如圖1(c)所示[16]。文獻[17]對銥星信號輔助下的GPS終端的完好性進行了分析。結果表明,銥星的增強顯著提高了接收機RAIM故障檢測和識別概率。
基于海洋開發和水下軍事對抗的需要,出現了集通信、水聲定位和衛星導航定位技術于一身的水下GPS定位系統[18]。我國首套水下GPS高精度定位導航系也于2004年1月研制成功,如圖1(d)所示[19]。水下GPS定位系統主要由安裝在水下目標上的收發器和漂浮在海面上的智能GPS浮標(GIB)組成,可較好地解決水下運動目標的實時精確定位問題[20]。
在提升GNSS完好性方面,偽衛星最引人注目的應用是飛行器精密進近與著陸,如圖1(e)所示[21]。在這些應用中,偽衛星觀測能為導航方案提供額外的完好性檢測[22]。偽衛星信號在增強衛星幾何強度、改善可用性和完好性,以及提高定位精度方面都能作出明顯的貢獻,尤其是在高度分量上[23]。近年來,我國有學者提出了基于北斗系統并結合偽衛星的動態和獨立的飛行器配置方案[24]。
此外,由于在高度角比較低時,偽衛星的載波相位測量也具有較高的精度[23],偽衛星還被應用于如礦山的機器控制,如圖1(f)所示[25],以及形變監測[26-27]等許多高精度測量領域。

圖1 偽衛星增強GNSS應用實例
2. 偽衛星獨立工作模式
在一些極端環境下,GNSS衛星可能完全不可見,這時完全使用偽衛星定位是一個可選方案(如圖2所示)。文獻[28—29]中提出并測試了偽衛星在室內導航與定位中的應用。文獻[30]中提出了一個關于偽衛星室內定位的模擬實驗。文獻[31]中開發了一個軟件仿真工具,用于預測一個部署了6顆偽衛星的隧道中可達到的定位精度。最近,關于偽衛星室內定位有學者提出了新的算法,如用矢量跟蹤環和Kalman濾波替代原來的標量跟蹤環[32-33]。文獻[34—35]介紹了在GNSS無法工作的場合,基于Locata系統進行室內外定位方面的最新進展。

圖2 偽衛星室內定位示意圖
偽衛星獨立定位的另一個重要而有趣的應用是用于外星上的定位與導航,如火星[36]。圖3展示了一個部署在火星上的偽衛星陣列,其設計目標是為火星上的機器人漫游提供厘米級精度的位置和高度信息服務。這種高精度定位服務也將為后續的外星探索提供支撐。為了解決偽衛星自身位置的精確標定問題,文獻[37—38]中提出了一種自動標定偽衛星陣列(SCPA)的技術。這些偽衛星被設計為收發器,它們能夠接收和發送測距信號用于確定它們之間的相對位置,直至陣列中的所有偽衛星的位置都得到標定。
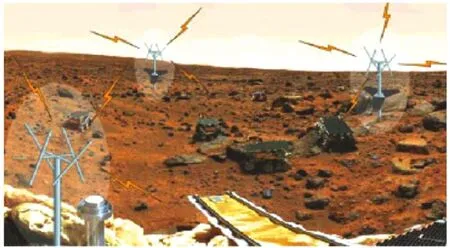
圖3 火星上的偽衛星自校準陣列
3. 廣義偽衛星增強GNSS系統
偽衛星能夠與GNSS系統已有衛星建立時空關聯,并作為導航臺對外提供導航信號,從而使GNSS系統的服務性能得到提升。相對于GNSS系統,它是用戶;相對于其他下級用戶,它又是導航臺。可以將偽衛星看作GNSS衛星信號的中繼器,它同步于GNSS系統,以自己的時空基準為基礎發射相應的導航信號,供導航用戶使用。
傳統偽衛星主要是補充GNSS導航信號的不足,側重于信號層的增強,通過增加新的導航信號實現DOP值的改善和完好性的提升。差分GPS、連續運行參考站(CORS)主要是通過廣播精密星歷在信息層增強來提高用戶精度。WAAS等星基增強系統(SBAS)就不但播發修正信息,還播發增強信號,其GEO衛星也可以看作一種偽衛星。
傳統偽衛星一般指的是陸基偽衛星,隨著技術進步和需求提升,偽衛星平臺也逐步發展到無人機、臨近空間(飛艇)、微小衛星和低軌衛星(LEO)。特別是GPS系統與銥星系統結合形成的iGPS,為LEO增強GNSS系統,以及導航通信一體化提供了范例。根據使用場合的不同,偽衛星發射的信號頻段、調制、多址等方式與GNSS信號可能差異較大。如對于水下導航,需要將射頻信號轉換到水聲信號。
因而,可以歸納出廣義偽衛星的概念,廣義偽衛星指的是可以播發增強導航信號,可以播發增強星歷信息,具備一定通信能力,可以根據需要布設于各類載體平臺,從而實現GNSS系統信號層、信息層和通信能力全面增強的設備。可見,偽衛星不僅可以作為GNSS的原型驗證和測試設備,也可以作為GNSS星座的補充和延伸,實現GNSS可用性、安全性、完好性和精確性的提升。
可用性體現在可以使GNSS信號延伸到室內水下等傳統GNSS無法覆蓋的領域;安全性提升主要體現在導航對抗中,如基于飛艇或無人機的偽衛星可以實現區域功率增強,為己方用戶機提升抗干擾能力,爭奪制導航權提供有力支撐;完好性提升的一個典型應用是飛機精密引導/著陸系統,現在陸基增強系統GBAS C已經可以用于機場CAT-I,GBAS D也在逐步獲得ICAO批準用于CAT-II/III[39]。
因而,可以歸納出廣義偽衛星增強GNSS系統包含3層含義和4個效果。3層含義包括:信息輔助、信號增強、通信能力增強。4個效果包括:可用性、安全性、完好性和精確性的提升。
在廣義偽衛星概念基礎上,可以提出基于廣義偽衛星的新一代GNSS增強系統框架,通過各類載體平臺搭載廣義偽衛星,從而實現北斗系統可用性、安全性、完好性等的全面提升,如圖4所示。

圖4 基于廣義偽衛星的GNSS增強系統框架
二、偽衛星應用的關鍵問題
雖然偽衛星能夠為導航與定位應用提供巨大的靈活性、良好的幾何分布和信號可用性,但仍然存在若干需要解決的問題。下面將從5個方面介紹偽衛星應用中的關鍵問題和解決措施。
1. 兼容與互操作
偽衛星與其他衛星系統的兼容互操作問題,首先是與GNSS系統兼容與互操作。如果偽衛星占用了GNSS的工作頻率,需要特別關注如何避免對正常GNSS信號的干擾。添加脈沖的方法對遠近效應問題有改正效果。但隨著干擾技術對PNT服務的危害日益加劇,許多文獻的觀點是偽衛星應當工作在遠離GPS的頻率上[40]。為了選擇偽衛星的最佳工作頻率,應當考慮這些問題,以及與其他GNSS系統的集成和兼容性問題。
偽衛星接收機設計時也要考慮與已有GNSS接收機的兼容問題。由于偽衛星信號功率通常遠高于GNSS信號,如果偽衛星信號工作在GNSS頻段,會對GNSS信號形成較強的多址干擾。而且,接收機還面臨大電平動態范圍的考驗。因此,為了開發一個穩定的偽衛星接收機,必須考慮偽衛星信號傳播與接收的各種操作條件。此外,應在盡量少改動已有GNSS接收機的情況下,實現對偽衛星信號的接收。只修改接收機固件(firmware)或采用軟件接收機架構被認為是解決這類問題的有效措施。
2. 時間同步
時間同步是基于測時測距的導航定位系統的基礎。與GNSS軌道衛星不同的是,偽衛星裝載的時鐘的質量比較低,這樣的時鐘沒有足夠的精度以使偽衛星之間的時間保持同步。在全部采用偽衛星定位的應用中,時鐘同步則顯得更為重要。開發一個在各種環境下的時鐘同步方案是一件十分值得期待的工作。如果時鐘同步誤差能夠控制在載波相位的誤差級別,那么單差分整數相位模糊可以得到有效解析,使用單接收機時有望達到厘米級的定位精度。
對于偽衛星與GNSS系統之間的時間同步,可以采取衛星授時的模式,如果采用載波相位和精密單點定位(PPP)可以獲得更高的時間同步精度。對于偽衛星之間的時間同步,可以采取共視法(CV)或雙向測距比對的方法。當偽衛星坐標位置已知時,可以采取類似Locata的TimeLoc技術[41],通過單向高精度測距扣掉偽衛星間直線距離的方式,實現偽衛星之間的高精度時間同步。
3. 遠近效應
由于偽衛星的信號功率比GNSS信號功率大很多,會導致出現兩種情況:當接收機天線與偽衛星相當近時,偽衛星信號可能被認為是一種干擾;反過來,當接收機天線與偽衛星距離特別遠時,偽衛星信號則太弱,難以被捕獲跟蹤。文獻[42]將其稱為遠近效應問題(near-far effect),當用戶機在偽衛星鄰近的區域內活動時可能會使得其接收到的偽衛星強度呈現出高動態變化。
為解決遠近效應問題,許多研究人員提出了各式各樣的解決方案。Parkinson在文獻[43]中提出了3個解決措施,包括對偽衛星信號施加一個固定的周期脈沖、使用比GPS編碼更長的編碼序列等。文獻[44]中提出的解決遠近效應的方案是針對GLONASS衛星系統的,其方法類似于上面的第2個方案。文獻[45]中提出的連續干擾消除方案也是針對遠近效應問題的。這種方法是基于信號處理技術的,無需修改接收機硬件。相關的理論分析表明該方法中結合相位和碼可以很好地處理遠近效應問題[46]。而文獻[47]中則指出,使用具有適當的天線輻射場型的特殊天線也可以解決遠近效應問題。最近,也有一些學者提出了能有效消除遠近效應的方法,如雙向傳輸法[48]。
4. 誤差修正
在偽衛星應用特別是室內定位應用中,多徑效應和非視距傳播是一個引起普遍關注的問題。在靜態定位中,多徑效應引起的偏差似乎停留在一個常量狀態。但在動態模式下,這些可能的偏差則變得隨機化,使得問題難以處理。解決這個問題有若干種方法,如使用適當的發射和接收天線,穩定跟蹤技術及多傳感器融合。最新的超寬帶技術(UWB)能夠有效地緩解多徑效應,在室內定位應用中很有潛力。
偽衛星信號在傳播的過程中會受到大氣層的影響。偽衛星布設的高度一般比較低,通常僅需考慮對流層對偽衛星信號的影響。偽衛星延遲修正模型主要有兩種:一種是將大氣折射率描述為氣象參數的函數;另一種是自適應對流層延遲算法,將對流層延遲作為定位解算中的一個附加未知參數。此外,對真實環境下的無線信號測距進行建模是一項富于挑戰性的工作,如在室內傳播的信號受到墻壁阻隔時,存在許多可能的誤差。對誤差進行統計,以提出適當的信號傳播模型是比較困難的。
5. 信號體制設計
為了解決偽衛星與GNSS系統的兼容與操作,以及遠近效應、非視距傳播和多徑效應傳播誤差等問題,從信號體制設計上進行突破是優先考慮的方案。文獻[43—44]中提出的解決偽衛星遠近效應的措施,采用TDMA周期脈沖就是一種信號體制設計上的改進。為了解決偽衛星室內定位中面臨的非視距誤差等問題,文獻[49—51]對TDMA、CDMA、FDMA、OFDMA及其組合應用的各種信號體制進行了分析對比和總結,提出了基于OFDMA的方案。為了解決偽衛星應用中的遠近效應、多址干擾等兼容互操作問題,文獻[52]從信號體制設計角度進行了全面分析和總結。
三、偽衛星實現架構和組網同步
偽衛星的物理實現和組網模式是基于廣義偽衛星的GNSS增強系統工作的基礎。在上述偽衛星工作模式和關鍵技術基礎上,下面歸納提煉出廣義偽衛星的兩種實現架構和組網同步模式。
1. 偽衛星實現架構
根據偽衛星的信號生成方式,可以分為轉發式偽衛星和再生式偽衛星兩大類;相應的,偽衛星的實現架構也可以分為兩大類。
一類是轉發式偽衛星,起到導航衛星信號的中繼器和放大器的作用,通過模擬或數字的方式,在射頻或中頻實現對GNSS信號的放大,提升GNSS信號的功率,如圖5所示。
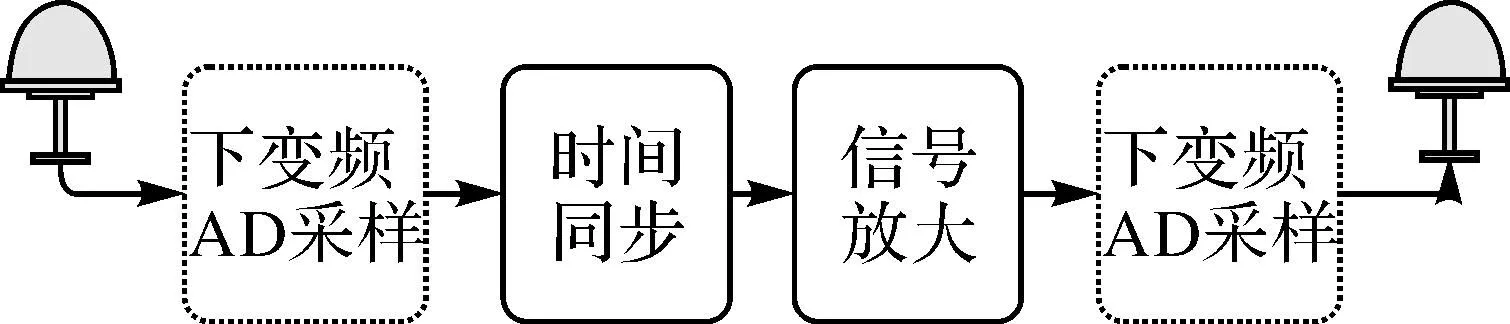
圖5 轉發式偽衛星架構
另一類是再生式偽衛星,通過接收GNSS信號實現偽衛星與GNSS系統的高精度時間同步和位置確定,如圖6所示。在此基礎上,重新生成新的偽衛星導航信號。偽衛星信號的頻點帶寬、調制方式、擴頻碼等信號體制與GNSS信號可能不同。此外,再生式偽衛星可能具備通信模塊,能夠播放高精度星歷并能將收集的數據上報。
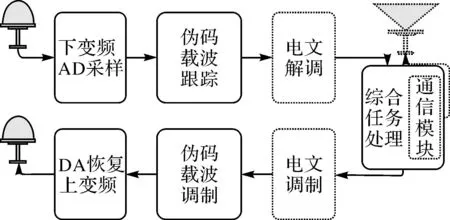
圖6 再生式偽衛星架構
根據是否進行電文解調、是否具備通信模塊,再生式偽衛星又可以細分為4種模式。再生式偽衛星實現了接收與發射合二為一,可以增強GNSS信號功率、提升載噪比,也可以通過信號體制的變化將GNSS時空基準延伸到水下等傳統GNSS信號無法覆蓋的場合。偽衛星的通信模塊還能發播高精度星歷信息,并能實現信息的回傳和上報。
2. 偽衛星組網同步模式
對于通過測量時差實現測距的系統而言,時間同步是系統正常工作的前提條件,而同步精度直接影響最終定位精度。對于偽衛星組網來說,首先要考慮的也是偽衛星之間的同步模式,以及它們與GNSS系統之間的時間同步。
根據偽衛星的兩大類工作模式,可以得到兩類組網模式:偽衛星獨立組網模式和偽衛星同步GNSS組網模式。
在沒有GNSS信號時,偽衛星處于獨立組網模式,有一個主偽衛星作為整網的時間基準,其他輔偽衛星通過時間同步鏈路與主偽衛星實現高精度時間同步。用戶機可以通過主、輔偽衛星的信號時延測量實現導航定位和授時,如圖7所示。
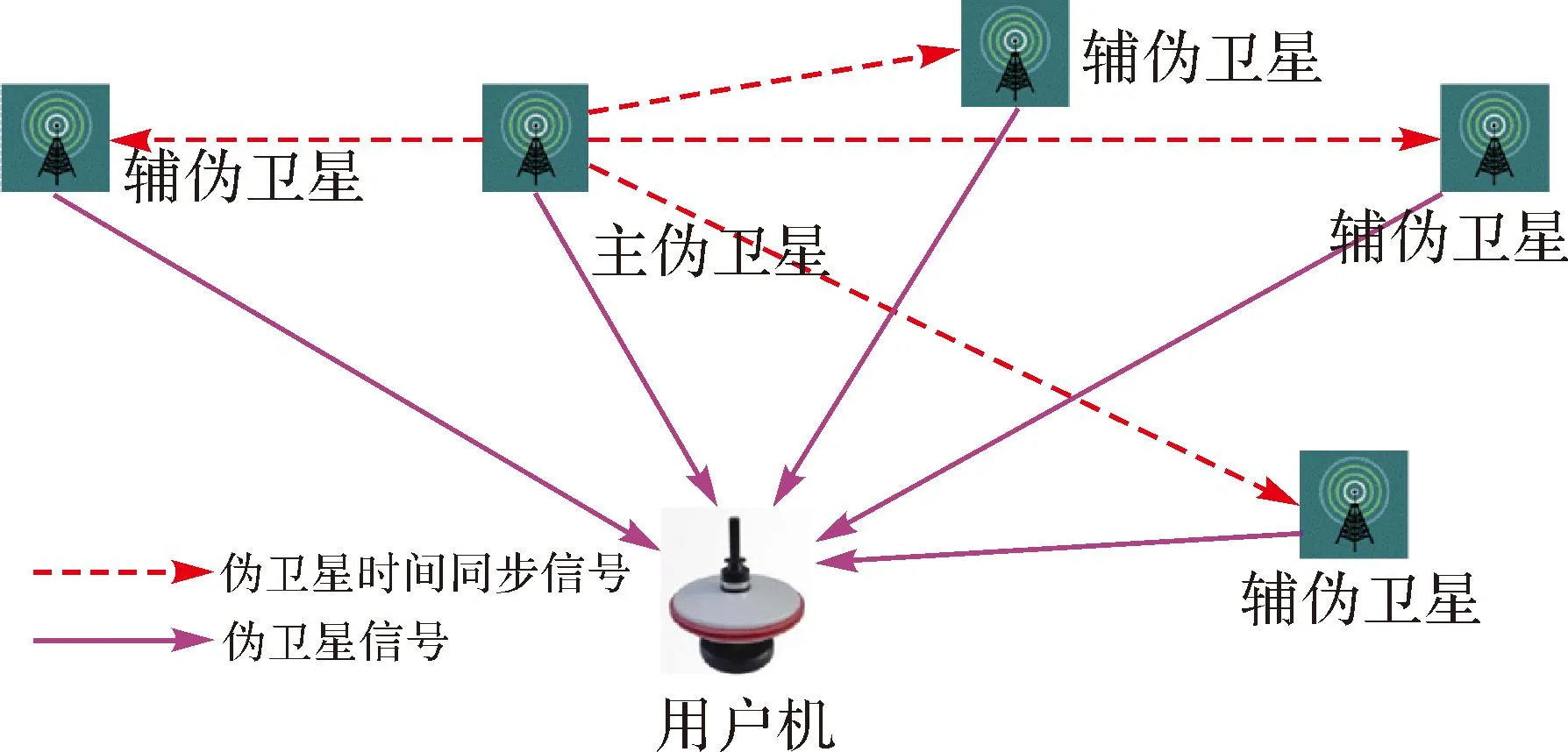
圖7 偽衛星獨立組網模式
有GNSS信號時,偽衛星處于輔助GNSS組網模式。主偽衛星同步到GNSS系統之后,作為整網的時間基準,其他輔偽衛星通過時間同步鏈路與主偽衛星實現高精度時間同步。用戶機通過接收GNSS、偽衛星的信號時延測量實現導航定位和授時,如圖8所示。
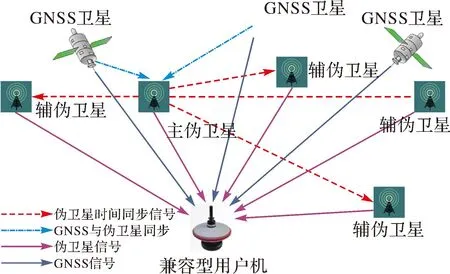
圖8 偽衛星同步GNSS組網模式
偽衛星同步GNSS模式下,用戶機如果同時接收GNSS和偽衛星信號,則通常需要兼容型用戶機。當然,用戶機也可能只接收偽衛星信號實現定位和授時,如水下GNSS定位系統。
四、結束語
GNSS系統具有覆蓋廣、全天候、高精度等優點,但是隨著人們對PNT服務質量需求的提升,GNSS系統也暴露了許多不足。本文針對GNSS系統可用性、完好性、安全性和精確性全面提升的需求,提出了廣義偽衛星的概念,在系統梳理偽衛星的兩類應用模式基礎上,提出了基于廣義偽衛星的GNSS增強系統框架。在梳理歸納偽衛星應用中面臨的關鍵技術基礎上,提出了兩種偽衛星的組網模式:獨立組網模式和同步GNSS組網模式;提出了兩大類偽衛星實現架構:轉發式和再生式。上述研究成果為偽衛星的應用奠定了技術基礎。
本文提出的廣義偽衛星的概念還可以延伸到協作導航領域[53-54]。在協作導航中,任何位置和時間精確的用戶也可以作為導航臺,可以實現導航信號的多次中繼和分布式使用,可以預見將來的PNT體系將是以GNSS為主,各種偽衛星增強為輔,共同實現PNT服務的可用性、安全性、完好性和精確性的提升。
參考文獻:
[1]HARRINGTON R L, DOLLOFF J T. The Inverted Range: GPS User Test Facility[C]∥IEEE PLANS’76. San Diego, California: IEEE, 1976: 204-211.
[2]WOLF R, THALHAMMER M, HEIN G W. GATE-the German Galileo Test Environment[C]∥Proceedings of the ION GNSS. Portland, USA: [s.n.], 2003: 1009-1015.
[3]WANG J. Pseudolite Applications in Positioning and Na-vigation: Progress and Problems[J]. Journal of Global Positioning Systems, 2002, 1(1): 48-56.
[4]郭睿, 唐波, 劉利, 等. 偽衛星增強下的北斗系統服務精度仿真分析[J]. 測繪通報, 2014(10): 7-10.
[5]RAPINSKI J, CELLMER S, RZEPECKA Z. Pseudolite Signal Tests[J]. Artificial Satellites, 2012, 47(4): 147-153.
[6]RAPINSKI J, KOZIAR M, RZEPECKA Z, et al. Some Considerations in Designing a GPS Pseudolite[J]. Artificial Satellites, 2012, 47(1): 1-11.
[7]KIM C, SO H, LEE T, et al. A Pseudolite-based Positioning System for Legacy GNSS Receivers[J]. Sensors, 2014, 14(4): 6104-6123.
[8]WAN X G, ZHAN X Q. The Research of Multipath and Linear Error for Pseudolites Applications[J]. Applied Mechanics and Materials, 2012, 130-134: 2890-2893.
[9]CHEN J Y, LI X B, MIN D X, et al. High Accuracy Reconstruction Platform for GNSS/Pseudolite Hybrid Constellation Simulator[C]∥2013 IEEE 11th International Conference on Electronic Measurement Instruments (ICEMI). Harbin: IEEE, 2013: 187-191.
[10]HWANG S, YU D H. Clock Synchronization of Pseudolite Using Time Transfer Technique Based on GPS Code Measurement[J]. International Journal of Software Engineering and Its Applications, 2014, 8(4):35-40.
[11]WU M K, HUANG J S, XU Y M, et al. Precise Antenna Calibration for Ground-based Pseudolite[M]∥RIZOS C, WILLIS P. Earth on the Edge: Science for a Sustainable Planet. Berlin Heidelberg: Springer, 2014: 487-491.
[12]SAKAMOTO Y, ARIE H, EBINUMA T, et al. Doppler Positioning with a Movable Receiver Antenna and a Single Pseudolite for Indoor Localization[C]∥2011 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). Budapest: IEEE, 2011: 19-24.
[13]DAI L W, WANG J L, TSUJII T, et al. Pseudolite Applications in Positioning and Navigation: Modelling and Geometric Analysis[C]∥Int. Symp. on Kinematic Systems in Geodesy, Geomatics & Navigation (KIS2001). Banff, Canada: [s.n.], 2001: 482-489.
[14]COLLINS R. Pseudolite GPS Anti-Jamming Systems [J]. Defense Update, 2004.
[15]MORLEY T, LACHAPELLE G. Pseudolite Augmentation for OTF Ambiguity Resolution in Shipborne Mode[J]. Journal of Surveying Engineering, 1998, 124(1): 26-39.
[16]WHELAN D. iGPS: Integrated Nav & Com Augmentation of GPS[EB/OL]. [2015-09-11]. http:∥scpnt.stanford.edu/pnt/PNT10/presentation_slides/10-PNT_Symposium_Whelan.pdf.
[17]田世偉, 李廣俠, 常江, 等. 基于銥星增強的GPS系統RAIM性能[J]. 解放軍理工大學學報(自然科學版), 2013, 14(3): 237-241.
[18]TAN H P, DIAMANT R, SEAH W K G, et al. A Survey of Techniques and Challenges in Underwater Localization[J]. Ocean Engineering, 2011,38(14-15): 1663-1676.
[19]王權, 程鵬飛, 章傳銀, 等. 差分GPS水下立體定位系統[J]. 測繪科學, 2006, 31(5): 18-19.
[20]秘金鐘, 章傳銀, 高星偉, 等. 水下GPS系統的時間同步標定研究與試驗[J]. 測繪科學, 2007, 32(3): 36-37.
[21]BARTONE C G, KIRAN S. Flight Test Results of an Integrated Wideband Airport Pseudolite for the Local Area Augmentation System[J]. Navigation, 2001, 48(1): 35-48.
[22]PERVAN B S, COHEN C E, PARKINSON B W. Inte-grity Monitoring for Precision Approach Using Kinematic GPS and a Ground-based Pseudolite[J]. Navigation, 1994, 41(2): 159-174.
[23]WANG J, TSUJII T, RIZOS C, et al. GPS and Pseudo-satellites Integration for Precise Positioning[J]. Geomatics Research Australasia, 2001(74): 103-117.
[24]KANG G H, TAN L Y, HUA B, et al. Study on Pseudolite System for BeiDou Based on Dynamic and Independent Aircrafts Configuration[M]∥SUN J D, JIAO W H, WU H T, et al. China Satellite Navigation Conference (CSNC) 2013 Proceedings. Berlin Heidelberg: Springer, 2013: 159-172.
[25]STONE J M, LEMASTER E A, POWELL J D, et al. GPS Pseudolite Transceivers and Their Applications[C]∥Proceedings of the ION National Technical Meeting. San Diego, CA, USA: [s.n.], 1999: 415-424.
[26]BARNES J, WANG J, RIZOS C, et al. The Performance of a Pseudolite-based Positioning System for Deformation Monitoring[C]∥2nd Symp. on Geodesy for Geotechnical & Structural Applications. Berlin, Germany: [s.n.], 2002: 21-24.
[27]楊光. GPS和偽衛星組合定位技術及其在形變監測中的應用研究[J]. 測繪學報, 2006, 35(4): 410.
[28]ZIMMERMAN K R. Experiments in the Use of the Global Positioning System for Space Vehicle Rendezvous[M]. Stanford: Stanford University, 1996.
[29]KEE C, JUN H, YUN D, et al. Development of Indoor Navigation System Using Asynchronous Pseudolites[C]∥Proceedings of ION GPS. Salt Lake City: [s.n.], 2000: 1038-1045.
[30]WANG J L, DAI L W, TSUJII T, et al. GPS/INS/Pseudolite Integration: Concepts, Simulation and Testing[C]∥Proceedings of the ION GPS. Salt Lake City: [s.n.], 2001: 2708-2715.
[31]GALIJAN R C. Analysis and Simulation of a Candidate Deployment Geometry and Characteristics of Pseudolites with a Tunnel[C]∥Proceedings of ION GPS. Kansas City: [s.n.], 1996: 527-533.
[32]LIU Y Y, LIAN B W, SONG Y L, et al. Rapid Reacquisition Algorithm with Vector Tracking Loop in Indoor Pseudolite Applications[M]∥SUN J D, JIAO W H, WU H T, et al. China Satellite Navigation Conference (CSNC) 2014 Proceedings. Berlin Heidelberg: Springer, 2014: 787-795.
[33]劉洋洋, 廉保旺, 趙宏偉, 等. Kalman濾波輔助的室內偽衛星相對定位算法[J]. 物理學報, 2014, 63(22): 228402. doi: 10.7498/aps.63.228402.
[34]李冬, 焦文海, 馬銀虎, 等. Locata系統概況及啟示[C]∥第五屆中國衛星導航學術年會論文集. 北京: [s.n.], 2014.
[35]RIZOS C. Locata: A Positioning System for Indoor and Outdoor Applications Where GNSS Does Not Work[C]∥Proceedings of the 18th APAS. Canberra, Australia: [s.n.], 2013: 73-83.
[36]LEMASTER E, ROCK S. Mars Exploration Using Self-calibrating Pseudolite Arrays[C]∥Proceedings of the Institute of Navigation GPS-98 Conference. Nashville: [s.n.], 1998: 1967-1974.
[37]LEMASTER E A. Self-calibrating Pseudolite Arrays: Theory and Experiment[D]. Stanford: Stanford University, 2002.
[38]MATSUOKA M, ROCK S M, BUALAT M G. Autonomous Deployment of a Self-calibrating Pseudolite Array for Mars Rover Navigation[C]∥PLANS 2004 Position Location and Navigation Symposium. [S.l.]: IEEE, 2004: 733-739.
[39]MIHAELA-SIMONA C, MICHAEL F, SAM P. Galileo E1 and E5a Performance for Multi Frequency and Multi Constellation GBAS[J]. GPS World, 2015(4): 30-35.
[40]PARKINSON B W. Assured PNT for Our Future: PTA[J]. GPS World, 2014(9): 24-31.
[41]GAUTHIER J P, GLENNON E P, RIZOS C C. Time Transfer Performance of Locata-Initial Results[C]∥Proceedings of the 45th Annual Precise Time and Time Interval Systems and Applications Meeting. Bellevue, WA: [s.n.], 2013: 150-157.
[42]COBB H S. GPS Pseudolites: Theory, Design, and Applications[D]. Stanford: Stanford University, 1997.
[43]KLEIN D, PARKINSON B W. The Use of Pseudo-satellites for Improving GPS Performance[J]. Navigation, 1984, 31(4): 303-315.
[44]GALIJAN R C, LUCHA G V. A Suggested Approach for Augmenting GNSS Category III Approaches and Landings: The GPS/GLONASS and GLONASS Pseudolite System[C]∥Proceedings of US Institute of Navigation GPS-93. Salt Lake City, Utah: [s.n.], 1993: 157-160.
[45]MADHANI P H, AXELRAD P, KRUMVIEDA K, et al. Mitigation of the Near-Far Problem by Successive Interference Cancellation[C]∥Proceedings of US Institute of Navigation GPS. Salt Lake City, Utah: [s.n.], 2001: 148-154.
[46]PROGRI I F, MICHALSON W R. An Alternative Approach to Multipath and Near-Far Problem for Indoor Geolocation Systems[C]∥Proceedings of US Institute of Navigation GPS. Salt Lake City, Utah: [s.n.], 2001: 11-14.
[47]S?DERHOLM S, JUHOLA T, SAARNIMO T, et al. Indoor Navigation Using a GPS Receiver[C]∥Proceedings of US Institute of Navigation GPS. Salt Lake City, Utah: [s.n.], 2001: 1479-1486.
[48]PICOIS A, SAMAMA N. Near-far Interference Mitigation for Pseudolites Using Double Transmission[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(4): 2929-2941.
[49]PROGRI I F. An Assessment of Indoor Geolocation Systems[D]. Worcester, MA: Worcester Polytechnic Institute, 2003.
[50]PROGRI I F, MAYNARD J, MICHALSON W R, et al. The Performance and Simulation of a C-CDMA Pseudolite Indoor Geolocation System[C]∥Proceedings of Institute of Navigation GNSS. Fort Worth, TX: [s.n.], 2006: 26-29.
[51]PROGRI I F, MICHALSON W R, WANG J L, et al. Indoor Geolocation Using FCDMA Pseudolites: Signal Structure and Performance Analysis[J]. Navigation, 2007, 54(3): 241-256.
[52]PROGRI I F. On Generalized Multidimensional Geolocation Modulation Waveforms[C]∥2012 IEEE/ION Position Location and Navigation Symposium (PLANS). Myrtle Beach, SC: IEEE, 2012: 919-951.
[53]WYMEERSCH H, LIEN J, WIN M Z. Cooperative Localization in Wireless Networks[J]. Proceedings of the IEEE, 2009, 97(2): 427-450.
[54]FIGUEIRAS J, FRATTASI S. Mobile Positioning and Tracking: From Conventional to Cooperative Techniques[M]. New York: John Wiley & Sons, 2011.
中圖分類號:P228
文獻標識碼:B
文章編號:0494-0911(2016)02-0001-07
作者簡介:朱祥維(1980—),男,副研究員,主要研究方向為衛星導航系統與時間同步技術。E-mail:zhuxiangwei@nudt.edu.cn
基金項目:國家自然科學基金(61403413)
收稿日期:2015-11-02
引文格式: 朱祥維,徐博,李井源,等. 基于廣義偽衛星的新一代GNSS增強系統[J].測繪通報,2016(2):1-7.DOI:10.13474/j.cnki.11-2246.2016.0037.