GNSS衛星導航地基增強系統與位置云服務關鍵技術
2016-04-06 11:47:07黃丁發周樂韜盧建康
西南交通大學學報 2016年2期
黃丁發, 周樂韜, 盧建康, 梅 熙,馮 威, 張 熙, 嚴 麗
(1. 西南交通大學高速鐵路運營安全空間信息技術國家地方聯合工程實驗室, 四川 成都 610031; 2. 中鐵二院工程集團有限責任公司, 四川 成都 610031)
GNSS衛星導航地基增強系統與位置云服務關鍵技術
黃丁發1, 周樂韜1, 盧建康2, 梅 熙2,馮 威1, 張 熙1, 嚴 麗1
(1. 西南交通大學高速鐵路運營安全空間信息技術國家地方聯合工程實驗室, 四川 成都 610031; 2. 中鐵二院工程集團有限責任公司, 四川 成都 610031)
針對地基增強系統自主研發了高精度增強參考站網絡位置服務平臺,通過與國際上代表性的平臺系統比測,結果表明:網絡RTK服務的初始化時間基本一致,相同測試點兩個系統的精度相當,均實現了厘米級的RTK定位.北斗與GPS聯合數據處理結果表明:聯合解的57條基線在X、Z方向均優于1 mm,Y方向優于2 mm.與北斗和GPS單獨解算相比,聯合解算分別有55條和53條基線精度得到了改善,占總體的96.5%和93.0%.針對大規模CORS網絡的多模GNSS數據融合、處理與位置服務問題,提出了建立位置無關服務和資源池的位置云服務的思想,實現數據處理與分析能力共享、多樣性服務、廣域無縫定位連接,為廣域分布式CORS網絡的信息獲取、共享、處理和分析等提供了全新的理論基礎.
GNSS;衛星導航;地基增強;多模GNSS數據融合;位置云;位置服務
全球導航衛星系統GNSS(global navigation satellite system)是衛星無線電導航定位系統的總稱,目前代表性的系統包括:美國的GPS、俄羅斯的GLONASS、中國的北斗系統(BDS)和歐盟的GALILEO.從衛星信號結構來看,北斗系統采用與GPS和GALILEO系統相同的碼分多址通信方式,GLONASS則采用頻分多址方式[1].在數據處理與誤差分析方面,BDS可從GPS系統中引用和改進相關的數據處理與誤差建模方法.相關研究表明, BDS偽距觀測精度已達33 cm,載波相位觀測精度約為2 mm[2],BDS系統所具備的兼容與互操作性也將對其他系統的定位與授時服務產生積極影響.
盡管GNSS在基于偽距觀測提供標準定位服務(SPS)和精密定位服務(PPS)方面可提供米級水平的位置服務,但在基于載波相位觀測的高精度(分米到厘米級)應用方面仍然需要地基增強技術.由于多模GNSS(GPS、GLONASS、BDS、GALILEO)的成功運行,衛星導航系統正向著多模互用及其逐步融合的方向發展,多模GNSS 互用技術必將在系統精度、可靠性和可用性上,對民用衛星導航定位產生重要影響.隨著我國北斗二代系統的運行和發展的持續深入,對高精度導航定位服務需求的快速增長,建立高精度衛星導航定位地基增強系統,融合多模GNSS 衛星互用技術的導航定位網絡平臺理論,面向廣域大規模網絡位置服務的理論體系已經成為關鍵的技術.
1 地基增強系統:參考站網絡技術
基于分布式連續運行參考站網絡CORS(continue operation reference station)是通過連續觀測數據的融合處理,實現空間相關誤差的精確建模與估計,然后由網絡通信進行修正數產品發布,是高精度地基增強GNSS衛星導航的關鍵技術.網絡RTK和PPPRTK均是通過地基增強的高精度定位技術.
目前,多功能GNSS 服務網絡的進程正方興未艾,全面建立滿足自身特點的區域多功能、多模融合互用的大規模觀測網絡,已經成為一種發展趨勢.全球導航衛星系統服務網絡體系,作為國家空間數據基礎設施(NSDI)的重要組成部分,已在我國各部門和區域范圍內相繼建成并已覆蓋我國大部分地區,以滿足現代高精度、區域范圍內的實時三維空間定位的需要[3].
1.1 網絡RTK的關鍵技術
國際上參考站系統的主要代表有:虛擬參考站(VRS)技術[4]、區域改正數(FKP)技術[5]和主輔站(MAC)技術[6]等.本團隊自主開發了“增強CORS網絡服務系統(ARSNet/VENUS)”,采用增強參考站技術,提供覆蓋區域及其周邊一定范圍內的厘米級網絡RTK服務[7-8],目前已支持北斗、GPS、GLONASS三星系統,如圖1所示.
CORS站將原始觀測數據實時傳回服務器,結合流動站返回的概略位置,服務器將在該位置上精確生成一個虛擬參考站,從而為流動站實現RTK定位服務.因此網絡RTK的質量取決于VRS虛擬觀測數據的質量,其相位和偽距觀測值計算式為
(1)
(2)

Δ為站間單差因子;
λ為載波波長;
φ為相位觀測值;
P為偽距觀測值;
i、j為衛星編號(i為參考衛星);
A為主參考站;
V為虛擬參考站;
ρ為站星幾何距離;
I為電離層延遲;
T為對流層延遲;
O為衛星軌道誤差;
M為多路徑延遲;
ε為其他觀測噪聲.

圖1 ARSNet/VENUS網絡RTK服務系統Fig.1 Network RTK System ARSNet/VENUS
1.2 ARSNet/VENUS與GPSNet的性能對比
自主研發的增強參考站網絡系統ARSNet/VENUS已在國內投入廣泛應用.為了驗證系統的服務性能,選擇美國TRIMBLE的GPSNet系統進行比測,以對兩套系統的服務質量做比較.測試選取川渝CORS網絡為實驗區,該網絡覆蓋川渝兩地約25萬km2,詳細對比了兩套系統服務下網絡RTK定位的初始化時間和精度.測試確保每個參考站三角單元內大約包含兩個測試點,統計得到美國TRIMBLE GPSNet和VENUS系統下測試點的初始化時間和內符合精度如表1、2,趨勢圖如圖2、3所示.
表2中:Pn、Pe、Pu分別為北、東和垂向測試點的精度.
統計表明:
(1) 兩套系統網絡RTK服務的初始化時間基本一致,相同測試點兩個系統在北、東方向上精度基本一致,兩套系統均達到了厘米級的定位結果;
(2) 互差結果顯示兩個系統存在一定的系統性偏差,但在精度范圍之內.

表1 測試點初始化時間統計表Tab.1 Statistics on initial time of test points

圖2 各系統測試點初始化時間對比圖Fig.2 Comparison of initial time between GPSNet system and VENUS system

(a)GPSNet系統(b)VENUS系統圖3 GPSNet系統和VENUS系統的內符合精度統計圖Fig.3 StatisticalgraphsofinnerprecisioninGPSNetsystemandVENUSsystem

表2 GPSNET系統和VENUS系統的精度統計表Tab.2 Statistics on positioning accuracy in GPSNet system and VENUS system
2 北斗與GPS數據融合處理
如前所述,北斗與GPS在信號結構上類似,所以其數學模型基本一致.在星座空間分布上,北斗系統包含有地球靜止軌道GEO(gostationary obit)衛星、傾斜地球同步軌道IGSO(iclined gosynchronous obit)衛星和中軌MEO(mdium erth obit)衛星組成.由于空間分布結構的異構性, BDS系統呈現出有別于其他GNSS系統的特性.在衛星軌道計算方面,BDS系統的GEO衛星的導航星歷解算過程與其他衛星存在不同.觀測值特征方面,BDS系統的衛星偽距多路徑誤差與GPS有顯著性的差異.在誤差建模方面,由于BDS衛星空間分布的異構性,不同類型衛星的誤差時變特征也存在系統性的差異,例如多路徑誤差的周期性與時變性.對BDS系統這些差異性的客觀認識和理解是實現高精度BDS位置服務的必要條件.當然還有空間和時間參考系統不同,這里不再討論,具體參見文獻[1].
2.1 BGO與TGO數據處理結果對比
為了實現北斗和GPS數據的聯合處理,本研究團隊開發了BGO(BDS/GPS Office)數據處理軟件,并與美國TRIMBLE的TGO軟件進行結果比較.針對某高速鐵路CPI控制網進行了實測分析,驗證北斗/GPS聯合數據處理的精度與可靠性.實測采用4臺三星系統接收機(可同時接受GPS、GLONASS和北斗衛星數據),共11個時段,每個時段約1.5 h,采樣間隔15 s.基線最長6 667 m,最短446 m.如圖4所示.
BGO處理了57條基線并與TRIMBLE的TGO處理結果進行比較,如圖5所示.坐標分量的差異均在2 cm內(圖5(a)),相對精度優于2×10-6(圖5(b)),證明兩者在數據處理精度上相當.
2.2 北斗/GPS聯合基線解算結果對比分析
針對以上57條基線,分別對GPS、北斗(BDS)數據單獨處理以及北斗/GPS聯合處理3種情況進行基線解算精度分析,如圖6所示.
通過對比BDS和GPS結果可知,存在少量BDS基線解算精度略遜于GPS,絕大部分BDS基線能達到與GPS相當的解算精度(注:目前北斗還在試運行階段).
北斗與GPS雙系統聯合后,能夠獲得更高精度的基線解算結果.經統計,聯合解的57條基線在X、Z方向均優于1 mm,Y方向優于2 mm.與北斗和GPS相比,聯合系統解算分別有55條和53條基線精度得到了改善,占總體的96.5%和93.0%.

圖4 高速鐵路CPI控制網三星系統建網示意Fig.4 CPI control network built by multi-mode GNSS receiver for high-speed railway

(a) 基線向量較差

(b) 相對精度圖5 BGO與TGO軟件處理GPS基線結果比較Fig.5 Result comparison of BGO and TGO baseline solutions
CPI控制網無約束網平差后,各基線分量平差改正數如圖6所示.北斗、GPS及聯合基線的分量改正數、最弱邊相對中誤差和最弱點點位精度均滿足CPI控制測量要求.
2.3 融合GPS/BDS的網絡RTK厘米級位置服務
隨著BDS星座發展進程的快速推進,現已形成覆蓋亞太地區的衛星導航定位能力,加之國內支持GPS/BDS的地基增強CORS網絡的逐步建成,融合GPS/BDS的網絡RTK服務需求已然形成.本自主研發的增強參考站網絡系統ARSNet/VENUS已發展為支持GPS、BDS、和GLONASS的多系統網絡RTK位置服務平臺.在一低緯度地區(北緯22°)的CORS基本單元提供RTK服務,站間距達到40 km.
表3為流動用戶實時定位的符合精度,表中:σn、σe、σu分別為北、東和高方向上的定位精度.
表4為模糊度固定的成功率.可以看出在6顆可視衛星的情況下,成功固定率也可以達到90%,加入北斗后可視衛星數達13顆時,成功固定率達到98%.

(a) 基線的X分量精度分布

(b) 基線的Y分量精度分布
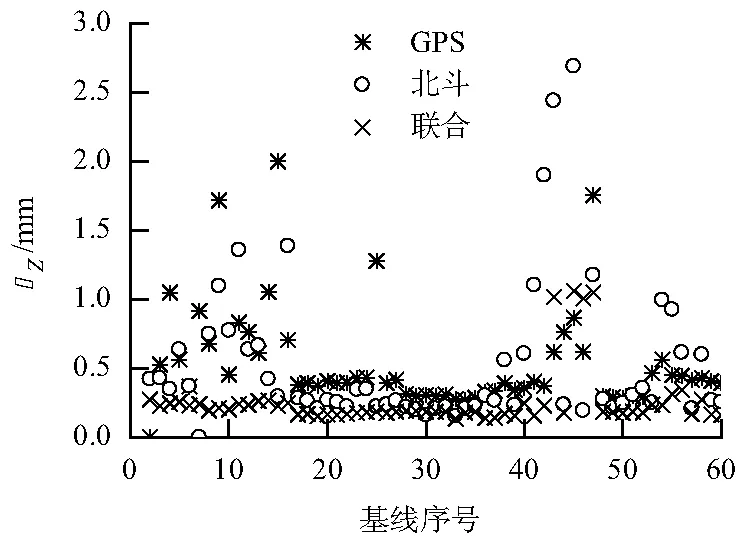
(c) 基線的Z分量精度分布圖6 GPS、北斗和聯合基線解算的精度Fig.6 Accuracy of GPS-only, BDS-only, and combined solutions
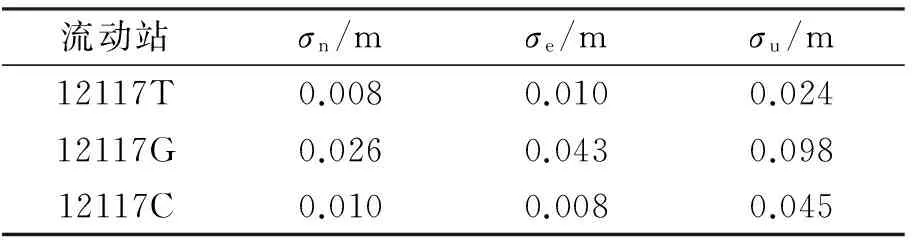
流動站σn/mσe/mσu/m12117T0.0080.0100.02412117G0.0260.0430.09812117C0.0100.0080.045

表4 模糊度固定成功率與衛星數的關系Tab.4 Relationship between satellite number and success rate of ambiguity fixing
3 大規模CORS網絡數據融合與位置云
3.1 地基大規模CORS網絡數據融合
地基增強CORS 網絡都是基于獨立部門需求而建立的局部網絡,雖然解決了局域性GNSS 實時移動定位問題,但作為國家空間數據基礎設施,還存在很多潛在和挑戰性的問題.為了持續穩定提供大范圍的高精度位置服務,連續運行參考站(CORS)網絡的規模日益增大,隨著大規模CORS網絡和多模系統的發展,未來GNSS位置服務將是GNSS大數據的時代[9-13].
首先,現有的衛星觀測網絡資源在地理位置上是分布式的,數據中心一般基于部門的局域網絡實現,是獨立的封閉系統;其次,基準不太統一,存在跨區域服務和邊界連接問題,無法實現高精度無縫導航定位,因為局部網絡GNSS 雖然在覆蓋區內精度分布均勻,但在區外定位精度會快速衰減;其三,就目前多系統并行發展的情況而言,多模和異構系統的互用技術成為發展的必然趨勢.
隨著互聯網技術的發展,以建立大規模GNSS 網絡數據中心,以物理門戶和業務框架為代表,打破應用和服務中間件的緊耦合,實現空間信息獲取與處理能力的大幅提升,為大規模國家CORS 網絡的建設提供了發展全新理論體系和解決方案的基礎.這就是本團隊提出的基于多模網絡GNSS 融合和位置云服務的思想,研究多模(北斗,GPS,Glonass,Galileo) 數據融合與互用技術,及其大規模多模網絡GNSS 衛星導航定位理論.
3.2 位置云服務基本架構
GNSS位置云服務由IaaS、PaaS、SaaS組成. IaaS是基礎設施及數據共享服務,連接CORS中心計算機,共享硬件及數據平臺,接收來自CORS站的觀測數據,并行分布式存儲在集群上.
PaaS是平臺服務,即數據處理與分析資源池,服務平臺包括:各類數據質量診斷、數據融合、GNSS產品及其發布(如:衛星軌道、時鐘參數、大氣模型修正等)、動態位置服務(網絡RTK)、事后精密數據處理與分析服務、以及完好性監測服務等.
SaaS是用戶與GNSS大數據云服務中心的交互窗口,負責用戶請求的參數配置及反饋解算結果,以客戶端和軟件服務的方式,提供特定用戶個性化需求的位置服務,如圖7所示.

圖7 GNSS位置云服務基本結構圖Fig.7 Basic structure of GNSS location cloud service
3.3 案例實驗分析
為了證明GNSS位置云服務的有效性,現以一案例進行實驗分析.
選用4臺計算機搭建服務器,并與Gamit/Globk對比解的精度及效率.4臺計算機分別命名為A、B、C、D,系統運行環境為ubuntu.從CORS數據中心選取228 d的數據,采樣率為30 s.這些數據均勻存儲在4臺計算機中,用于模仿不同CORS數據中心.實驗結果顯示, GNSS大數據云服務中心架構的解與Gamit/Globk的基線在精度上一致.但GNSS云服務中心架構解比Gamit/Globk的解算效率提高了25.5%.
4 結束語
要實現精密GNSS導航定位,關鍵在于各類GNSS相關誤差影響源的精確建模與估計,生成相應產品,然后通過網絡通信技術進行修正數發布,為移動用戶提供精密位置服務.地基增強是精密GNSS衛星導航定位的關鍵之一,而多模異構系統的數據融合和互用,是GNSS發展的必然趨勢.
本文針對地基增強GNSS衛星導航的幾個關鍵技術問題,通過對比測試分析了自主研發的增強參考站網絡服務系統軟件,在精度和初始化時間等性能指標上與目前國際上的同類產品相當,可提供厘米級實時導航定位服務.北斗導航衛星系統基線解的精度與GPS基線解的精度相當,從試驗結果看,聯合系統解算基線精度有明顯改善,主要是因為單一GPS或北斗在實驗區可觀測衛星數量和分布均有一定限制所致.雙系統聯合解算實際上是增加了觀測值并改善衛星空間幾何構型,從而改善了單一系統的定位性能.
位置云服務的思想是建立大規模GNSS 網絡數據共享,以物理門戶和業務框架為代表,打破應用和服務中間件的緊耦合.位置云將實現空間信息獲取與處理能力的大幅提升,為廣域地基增強高精度導航與位置服務,提供無縫導航定位與位置服務的全新理論體系和解決方案.
[1] 黃丁發,張勤,張小紅,等. 衛星導航定位原理[M]. 武漢:武漢大學出版社,2015: 203-219.
[2] 楊元喜,李金龍,王愛兵,等. 北斗區域衛星導航系統基本導航定位性能初步評估[J]. 中國科學:地球科學,2014,44(1): 72-81.
YANG Yuanxi, LI Jinlong, WANG Aibing, et al. Preliminary assessment of the navigation and positioning performance of Beidou regional navigation satellite system[J]. Science China: Earth, 2014, 44(1): 72-81.
[3] 黃丁發. 融合多星座GNSS的大規模網絡RTK與位置服務理論[J]. 學術動態,2014(2): 19-21.
[4] HU G R, KHOO V H S, GOH P C, et al. Internet-based GPS VRS RTK positioning with a multiple reference station network[J]. Journal of Global Positioning Systems, 2002, 1(2): 113-120.
[5] WUBBENA G, WILLGALIS S. State space approach for precise real time positioning in GPS reference networks[C]∥Proceedings ofInternational Symposium on Kinematic Systems in Geodesy, Geomatics and Navigation. Banff: [s.n.], 2001: 72-79.
[6] EULER H J, ZELZER O, TAKAC F, et al. Applicability of standardized network RTK message for surveying rovers[C]∥Proceedings of ION GPS/GNSS 2003 Proceedings, Session F. Portland: [s.n.], 2003: 1361-1369.
[7] 黃丁發,周樂韜,劉經南,等. 基于Internet的VRS/RTK定位算法模型及實驗研究[J]. 武漢大學學報:信息科學版,2007,32(3): 220-224.
HUANG D F, ZHOU L T, LIU, J N, et al. Internet based VRS /RTK positioning algorithm and experiment[J]. Geomatics and Information Science of Wuhan University, 2007, 32 (3): 220-224.
[8] 黃丁發,周樂韜,李成鋼,等. GPS參考站網絡系統[M]. 北京:科學出版社,2011: 86-90.
[9] BOOMKAMP H. Distributed processing for large geodetic solution[C]∥Proceedings of Reference Frames for Applications in Geosciences. Berlin: Springer Heidelberg, 2013: 13-18.
[10] NEILAN R, FISHER S, KHACHIKYAN R, et al. IGS technical report 2012 central bureau[C]∥Proceedings of IGS Technical Report 2012. [S. l.]: Astronomical Institute, University of Bern, 2013: 13-18.
[11] SNAY R A, SOLER T. Continuously operating reference station (CORS): history, applications, and future enhancements[J]. Journal of Surveying Engineering, 2008, 134(4): 95-104.
[12] SAGIYA T. A decade of GEONET: 1994—2003: the continuous GPS observation in Japan and its impact on earthquake studies[J]. Earth Planets and Space, 2004, 56(8): XXIX-XLI.
[13] DANG Y, ZHANG P, ZHAO Z, et al. The data processing and analysis of national GNSS CORS network in China[C]∥Proceedings of 2007—2010 China National Report on Geodesy for The XXV General Assembly of IUGG, Report No. 4. Melbourne: [s. n.], 2011: 1-6.

黃丁發(1963—),博士,1998年起至今任職于西南交通大學,現為地球科學與環境工程學院教授,博士生導師.主要研究方向為全球導航衛星系統(GNSS);精密工程測量、組合導航與智能交通系統、應急輔助決策信息系統.承擔國家高新技術研究發展計劃(863)、國家自然科學基金、國家科技支撐計劃及其他部委科技開發項目40余項.先后在香港理工大學、美國加州大學San Diego(UCSD)從事合作與訪問研究.發表論文200余篇,出版專著4部,高等學校規劃教材3部.現任中國測繪地理信息學會理事、四川省測繪地理信息學會和四川省地震學會常務理事.
E-mail: dfhuang@swjtu.edu.cn

周樂韜(1977—),博士,2007年起至今任職于西南交通大學,現為地球科學與環境工程學院副教授,碩士生導師.主要研究方向為全球衛星地基增強系統、全球衛星精確導航與定位、衛星及慣導組合導航、室內外無縫導航與定位、全球衛星大氣遙感.承擔及參與國家自然科學基金、國家高技術發展研究計劃(863)項目等課題20余項.兼任中國測繪學會大地測量與導航專業委員會委員.
E-mail: ltzhou@swjtu.edu.cn
(中文編輯:秦 瑜 英文編輯:蘭俊思)
Key Techniques of GNSS Ground-Based Augmentation System and Location Based Cloud Service
HUANGDingfa1,ZHOULetao1,LUJiankang2,MEIXi2,FENGWei1,ZHANGXi1,YANLi1
(1. State-Province Joint Engineering Laboratory of Spatial Information Technology for High-Speed Railway Safety, Southwest Jiaotong University, Chengdu 610031, China; 2. China Railway Eryuan Engineering Group Co. Ltd., Chengdu 610031, China)
To accomplish a GNSS (global navigation satellite system) ground-based augmentation system, a high-precision location based service (LBS) platform using augmentation reference station network (ARSNet) was developed independently. The ARSNet was tested in comparison with the international representative LBS platform, showing that its initial time and precision of network real-time kinematic (RTK) positioning are at the same level as the international platform; i.e., centimeter-level RTK positioning can be achieved in the both LBS platforms. Experimental results of data processing by combination use of Beidou system (BDS) and global positioning system (GPS) indicate that the precision of the BDS/GPS combined solution is about 1 mm in theX-andZ-directions, and 2 mm in theY-direction for the 57 baselines tested. Compared to the BDS-only and GPS-only solutions, the BDS/GPS combined processing strategy can improve the precision in 55 baselines and 53 baselines respectively, namely 96.5% and 93.0% of the total baselines. In addition, key issues of multi-mode GNSS data fusion, processing, and location service in large-scale CORS network are studied. A location cloud service, with location-independent service and resource pool, is proposed to share capabilities of data processing and analyzing, and provide diversity services and wide area seamless positioning. The proposed techniques provide a new theoretical basis to obtain, share, process and analyze information for wide area distributed CORS network.
global navigation satellite system; satellite navigation; ground based augmentation; data fusion of multi-mode GNSS; location cloud; location based service
2015-10-15
國家自然科學基金資助項目(41374032); 中國鐵路總公司科技研究發展計劃資助項目(2014G04-A-3); 教育部創新團隊發展計劃資助項目(ITR13092)
黃丁發,周樂韜,盧建康,等. GNSS衛星導航地基增強系統與位置云服務關鍵技術[J]. 西南交通大學學報,2016,51(2): 388-395.
0258-2724(2016)02-0388-08
10.3969/j.issn.0258-2724.2016.02.018
P228
A
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
今日農業(2019年14期)2019-09-18 01:21:54
今日農業(2019年12期)2019-08-15 00:56:32
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
今日農業(2019年10期)2019-01-04 04:28:15
今日農業(2019年15期)2019-01-03 12:11:33
今日農業(2019年16期)2019-01-03 11:39:20