500kW短波發射機馬達調諧控制系統簡介
2016-04-01 10:04:31景軍合
科技視界 2016年7期
關鍵詞:發射機
景軍合
【摘 要】本文主要從TSW2500型500KW短波發射機TX系統YCS08功能開始,接著深度分析其在TX系統中的具體作用入手,著重介紹了馬達驅動及開關驅動的控制方式,最后重點分析了其在調諧系統中的重要性及其工作方式,對可能出現在播音期間的故障現象做了簡要描述。
【關鍵詞】發射機;YCS08;馬達;開關;調諧;限位;粗調;細調
0 引言
本文針對發射機系統單元YCS08功能,從馬達驅動和開關驅動工作方式入手,最后對兩者在發射機實際播音工作中的不同做了簡要的分析,通過對發射機調諧系統的工作原理和可能出現的故障現象作了簡要總結,能夠清晰全面的了解發射機正常播音中馬達控制系統的重要性。
1 馬達控制
1.1 硬件
馬達控制器板YCS08同SCS01控制器板一同構成一個計算單元來實現以下主要目的:控制所有馬達位置單元(MP);控制所有馬達開關單元(MS);執行來自ECAM的命令。
1.2 馬達驅動
DC馬達直流電機驅動單元用于移動可連續調節的元件。驅動單元包括一個直流電機,有一個蝸輪用于聯結一個高分辨率的十圈電位器,提供位置信息的信號。為了取得所需的元件調節速度,電機通常與需調節的元件直接聯結,不再使用其它傳動裝置;聯結電位器的齒輪比分別相適應于各自需調節的元件,以取得需要的位置精度,元件全行程至少應該對應電位器行程的80%。驅動單元的兩個終端限位由電機控制來監控,不需要在驅動單元上調節。
AC馬達交流電機驅動單元用于移動可連續調節的元件。驅動單元包括一個單相交流電機,有一個平面齒輪用于聯結一個高分辨率的十圈電位器,提供位置信息的信號,電機內部裝配兩個終端限位開關,并且有一個熱開關做過荷保護用。電機既可以順時針轉動也可以逆時針轉動,通過選擇端點連接方式進行轉換,聯結的十圈電位器同時依相同方向轉動,到達終端時,通過電機內部的終端限位開關使電機停轉,而2個終端限位可以通過調節2副鈍齒輪調整。電位器用于提供馬達驅動單元的位置指示信號,也是送到馬達控制器的調諧元件的位置信號,同時這個值也被送出,在ECAM上指示馬達的位置。為了取得所需的元件調節速度,電機通常與需調節的元件直接聯結,不再使用其它傳動裝置;聯結電位器的齒輪比分別相適應于各自需調節的元件,以取得需要的位置精度,元件全行程至少應該對應電位器行程的80%。
需要注意的是:電位器不能轉動超過它的硬限位;受控的電容和線圈同樣不能調節到超過它們的硬限位。
1.3 開關驅動
驅動單元用于移動一個轉換開關,就是有2個終端位置的開關。主動桿是線性移動,有一個與開關移動一致的特別的行程,終端限位開關安裝在小盒里面,從外部無法調節,MS電機驅動能夠調節的僅僅是主動桿。MS電機驅動的位置由馬達控制器通過繼電器控制。終端位置通過第3個繼電器監控,這個繼電器由驅動單元內的終端限位開關控制,就是馬達必須在2個終端位置中的1個,監控繼電器必須動作,位置信息信號在這些條件下給出。直流和交流驅動器有三種主要定位類型:連續往返驅動,在任意方向最小步執行和盡可能近地驅動到一指定位。
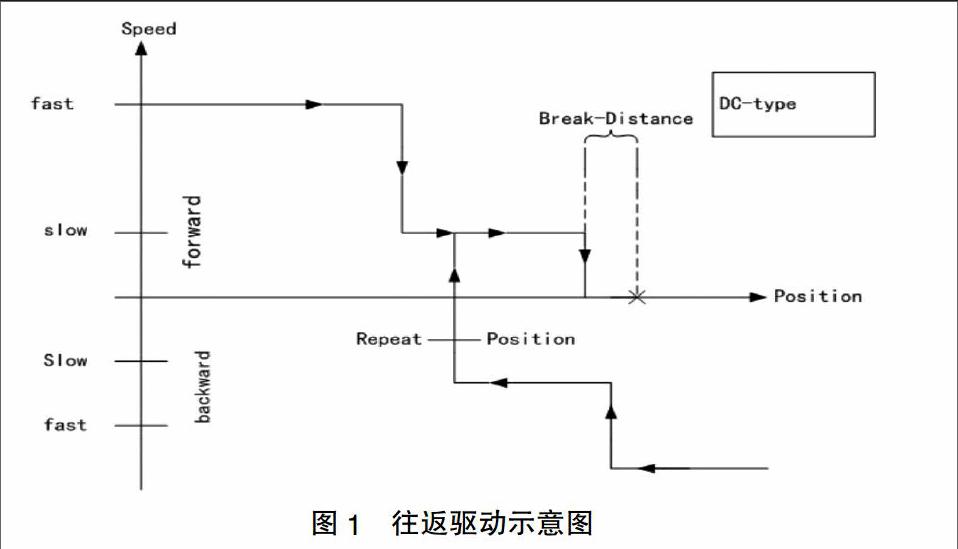
連續驅動和步進由操作者進行初始化,當驅動至指定用于馬達驅動器的粗調位置時,馬達位置由ECAM的預設和操作者數據存儲器中讀出。由于交流馬達只能用固定速度,它們和直流馬達相比控制方式略為簡單。齒輪的機械誤差通過存儲移動方向和所需位置來獲得補償。首先被移動到一個能從右邊自動驅動的位置,這就是為什么一個馬達開始時可以越過給定位置的原因。一旦馬達處于距所需位置的“break distance”[停止距離]便會停下,并認為已正確就位。到達點可以查看,若不在誤差范圍內,定位全程將重復進行,直至新的停止位和馬達數據合乎要求。可提供較慢速的直流馬達在接近目標時會被設為最低速,往返驅動這一移動模式通過按鍵UP和DOWN來初始化。直流驅動器會連續增速,而交流驅動器則會被設為額定速度。漸進模式下執行最小步,步進脈沖長度通過自適應方式控制。往返驅動示意圖見圖1:
1.4 馬達驅動與開關驅動的區別和作用
電感和電容有調諧范圍限制。若操作者試圖將馬達位置移出有效范圍,馬達將無任何錯誤信息提示地停止工作,只有當得到一個返回有效位置的指令時它才會有反應。由于安全原因,馬達開關只可在高末電子管不帶電的情況下更換。連接馬達控制板和順序控制板的一個特殊連接會迫使電源在任一馬達開關動作時關閉掉。因為反饋信號只表明馬達開關到達一個位置/馬達開關在移動,而直到第一個移動指令前,一個馬達開關的確切位置是不可知的,因此,在控制系統調諧后,所有的馬達開關位置是ON或OFF,而不再會是“未定義”。若馬達控制系統的自檢通過中央控制系統(ECAM)執行,將運行下列檢測:元件檢測和系統檢測;存儲器(RAM);電源元件;參考電壓;模數轉換器;對高末柵流(IG1V2)驅動器電流的一般性調諧包含兩個任務:一方面,調諧射頻網絡,讓驅動級調至駐波比最小;另一方面,設置射頻預放大器的放大倍數來得到IG1V2的正確調幅。這些調諧過程和驅動級調諧一起開始,依次執行,被稱為驅動短調的驅動級調諧以鑒相器1的輸出作為調諧標準。鑒相器1和驅動級電子管的負載阻抗有關,若要取得最優的射頻波發送到高末電子管的柵極的話就必須為零。射頻衰減器用于設置驅動器輸入(IG1V2)的放大倍數。額定的IG1V2由操作高末柵流正常值較正(GNOM)給出。末級調諧通過兩個方面執行:首先發射機輸出到天線的功率應達到額定值,第二應能達到效率最優。兩個值都是電子管V2陽級阻抗的功能,它又取決于由末級進行的射頻網絡調諧。
三個調諧值可進行調諧:高末陽極電壓VAV2決定額定輸出功率;輸出射電壓VFWD決定實際的輸出功率;鑒相器2的輸出作為陽級阻抗的標志,效率最優時應為0。測量結果取決于調制方式的調制級并允許任意條件下的調諧。這一順序隨著自動調諧而開始,并一直保持自動調諧狀態,直到其他指令發送到馬達控制器。調諧錯誤有兩種不同類型:小調諧錯誤和大調諧錯誤。一旦發生大的調諧錯誤,發射機會立即重新開始調諧,而小調諧錯誤發生一段時間后才會因累計造成發射機重新開始。
自動調諧系統是按照最新的控制技術設計的,大量的預置數值允許快速和可靠地粗調,細調是參考最新的控制技術重新設計的。由于使用現代微處理器技術和創新的工程技術,自動調諧系統具有靈活性和可靠性,它包含存儲和先前調諧數據的估計以及現代技術的應用,可以優化實際調諧狀態。發射機調諧系統分為兩個執行步驟:粗調和細調。粗調系統的主要特性有優良的先前調諧數據的(下轉第122頁)(上接第112頁)復制能力和高存儲容量;動態地處理調諧數據,這些數據來自不同的傳感器,象相位、負載、電流等檢測器,保證可靠地實現細調。發射機通常僅設置在11個標準廣播頻帶工作,在這些標準廣播頻帶內,調諧系統有230個預置數值分布在4.7-26.1MHz的短波頻帶內,每個預置數值包含詳細的調諧信息用于發射機的調諧程序,這包括所有馬達位置的要求,開關元件的位置等等。預置數值是調機期間設定的,操作者可以存儲100個最常用的運行狀態作為操作者預置數值,2個預置數值之間的頻率的數據是內插的,改進了調諧能力,可以使細調更快速,操作者更便利。所有調諧元件到達指定位置后,細調將立即開始。發射機按照載波頻率和天線負載調諧,相位、負載、電壓傳感器提供需要的調諧數據,調諧狀態被實時監測,負載的變化被自動調整。在11個國際標準短波波段內,發射機能夠調諧到任何一個載波頻率上,每步是100Hz和10Hz變化。
2 結束語
本文針對發射機系統單元YCS08功能,從馬達驅動何開關驅動工作方式作了簡要描述,最后對兩者在實際中的不同做了簡要的分析,能夠更加清晰的了解發射機射頻部分的調諧工作方式和可靠性都有了更加清晰的認識,明確了YCS08單元在發射機工作系統中所承擔的重要作用,同時對發射機調諧工作的重要作用有了一定的了解,對于在發射機工作中出現的調諧故障有了針對性和簡單的判斷和解決辦法,在實際工作會遇見如馬達轉動不到位、元器件位置變化、電機故障等一些故障現象,通過上述的描述可有效的提高了故障處理能力。
[責任編輯:王楠]
猜你喜歡
消費導刊(2018年10期)2018-08-20 02:56:28
電子制作(2018年9期)2018-08-04 03:31:04
電子制作(2018年12期)2018-08-01 00:48:02
消費導刊(2018年8期)2018-05-25 13:19:37
電子測試(2017年11期)2017-12-15 08:57:48
現代工業經濟和信息化(2016年22期)2016-08-23 11:55:40
西部廣播電視(2015年9期)2016-01-18 03:46:07
西部廣播電視(2015年8期)2016-01-16 03:45:32
西部廣播電視(2015年7期)2016-01-16 03:45:20
西部廣播電視(2015年3期)2016-01-15 02:05:45