基于DCS的過程實時控制平臺的研究
2016-03-30 13:25:18崔富義周巧儀
科技視界 2016年2期
崔富義 周巧儀


【摘 要】本過程實時控制研究開發平臺通過建立一套基于DCS的過程實時控制平臺,并配置有可組合的被控對象,用于檢測不同被控對象、被控參量的數學模型,進行理論分析;同時編制控制算法,在對象上進行控制效果的演示。可為高校控制工程、自動化等專業和社會過程實時控制研究、培訓機構提供專業化的仿真實驗設備,為自動化行業培養具有豐富理論知識并掌握其方法的專業化人才。
【關鍵詞】過程實時控制;DCS;MTLAB;數學模型;控制算法
1 研究背景
過程工業包括石油、化工、電力、核能、水處理、食品、生物、制藥、水泥、冶金等諸多行業,過程控制是自動化專業中一個重要的組成部分,過程實時控制技能也是控制工程師所應具備的重要技能之一。近年來,隨著中國從制造大國向制造強國的轉型升級,教育部強調教育人才要更加突出工程能力的培養,并對對高校實驗環節提出了設計型、綜合型、創新型和探索型等更高的教學目標要求。這就要求我們過程控制專業的學生在校期間能夠盡可能多地進行動手訓練,從實踐中獲得工程技能。然而生產過程常常伴有高溫、高壓等環節,因此很難在實驗室中構建與工業裝置相近的實驗對象,而目前許多學校采用以水槽液位為主要被控對象的過程控制實驗裝置,這種實驗對象被控環節類型過于簡單,時間常數過小,動態特性與真實生產裝置差別太大,實時性控制效果差等缺點。
MTLAB 是國際公認的優秀數學應用軟件之一,具有強大的數據計算和圖形顯示能力。[1]過程實時控制研究開發平臺以MATLAB為基礎,使用其中的Simulink和Real - Time Workshop以及相關工具箱作為底層測控平臺,并配置有可組合的被控對象,用于檢測不同被控對象、被控參量的數學模型,進行理論分析;同時在DCS系統中編制控制算法,在對象上進行控制效果的研究和測試,以構建一種適用于高校與科研機構進行過程實時控制研究的專業平臺設備。
2 系統組成
本平臺設計包括多個子系統,采用現場總線技術、實時控制技術,通過軟件的計算,建立多種參量下的被控對象系統數學模型;結合算法和不同控制模式,綜合比對控制效果。其包含被控對象、動力原件、接口、實時控制器、算法分析軟件及監控軟件等。各子系統部分開發內容見如下敘述。
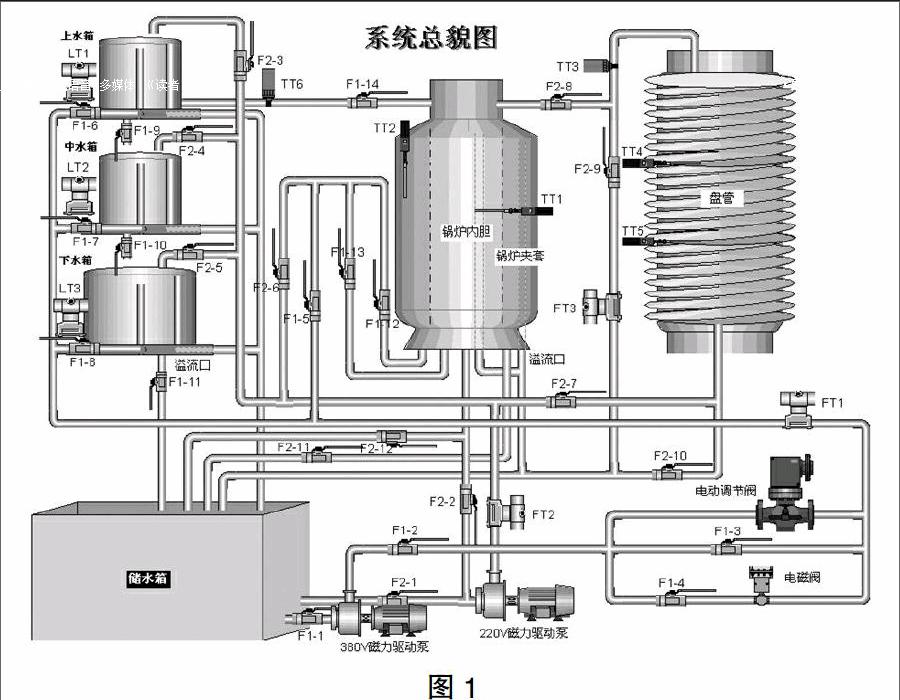
2.1 過程控制對象系統
過程控制對象系統是整個系統的被控模型,其典型參量的選用不僅考慮工業現場典型的參量,同時,還應組成典型的工作流程。同時,選取多種執行器,以比對其控制效果。
過程控制對象系統主要有溫度、壓力、液位、流量等四大熱工參量,同時,可組成單回路(一階、二階、三階)、串級、三閉環、比值、前饋反饋、滯后、解耦等控制對象和控制回路,融合了傳感器技術、計算機技術、網絡通信技術和自動化控制技術,通過設計、編程與運行,比對控制差異。同時,建立GUI工程,方便觀察與比較,通過直觀清晰的界面實現分析、監控。
對象系統分溫度、壓力、流量、液位四大熱工參量,其中動力系統有兩種,采用不銹鋼磁力驅動泵和鍋爐;執行器有三種,分別是變頻器、移相調壓模塊、電動調節閥,信號連接采用航空電纜插座的方式。
2.2 DCS過程控制系統
如圖2所示,系統的網絡由上到下分為監控網絡、系統網絡和控制網絡三個層次,監控網絡實現工程師站、操作員站、高級計算站與系統服務器的互連,系統網絡實現現場控制站與系統服務器的互連,控制網絡實現現場控制站與過程I/O單元的通訊。
一個大型系統可由多組服務器組成,由此將系統劃分成多個域,每個域可由獨立的服務器、系統網絡SNET和多個現場控制站組成,完成相對獨立的采集和控制功能。域有域名,域內數據單獨組態和管理,域間數據可以重名。各個域可以共享監控網絡和工程師站。而操作員站和高級計算站等可通過域名登錄到不同的域進行操作。
數據按域獨立組態,域間數據可以由域間引用或域間通信組態進行定義,并通過監控網絡相互引用。
系統具有的功能:數據采集、控制運算、閉環控制輸出、設備和狀態監視、報警監視、遠程通信、實時數據處理和顯示、歷史數據管理、日志記錄、事件順序記錄、事故追憶、圖形顯示、控制調節、報表打印、高級計算、組態、調試、打印、下裝、診斷。
(1)工程師站(ENS)
由高檔微機組成,具有以下功能:系統數據庫組態、設備組態、圖形組態、控制語言組態、報表組態、事故庫組態、離線查詢、調試、下裝。
(2)操作員站(OPS)
由高檔微機或工業微機組成,具有以下功能:流程圖顯示與操作、報警監視及確認、日志查詢、趨勢顯示,參數列表顯示控制調節、在線參數修改、報表打印。
(3)現場控制站(FCS)
由專用控制柜和專用控制軟件組成,控制柜中包括電源、主控單元、過程I/O單元、通信單元及控制網絡等組件。可根據組態的數據庫和算法完成:數據采集與處理、控制和聯鎖運算、控制輸出。
(4)系統服務器(SVR)
由高檔微機或服務器構成,完成實時數據庫管理和存取、歷史數據庫管理和存取、文件存取服務、數據處理、系統裝載等功能的計算機。系統服務器可雙冗余配置。
2.3 實時控制系統
系統主要由數字仿真計算機(數字機)、過程控制對象、數模轉換設備三部分組成。數字機是一臺通用微機,內存大,計算速度快,包括Windows操作系統,Matlab(帶Simulink和Real - Time Workshop以及相關工具箱),數據庫,用戶界面開發軟件等。數模轉換設備也是一個重要的組成況下的A/D、D/A轉換設備,當被測信號特殊時,可以設計專用的信號輸入轉換設備。本系統采用A/D、D/A轉換設備,具有如下功能:A/D為16路12位模數轉換器,D/A是12位雙路數模轉換器,8路DO。
數字機主要用于被測設備仿真模型庫的建立、測試仿真程序的運行和用戶界面程序以及結果的分析等;數字機控制整個系統的運行,控制各模塊的運行,并進行結果的分析和判斷,接口設備A/D 主要用來進行模擬信號采集與轉換,D/A 主要用于數字計算機輸出指令信號和控制信號到模擬對象的轉換。此外系統中的DO 主要是用來控制對象系統的擾動源。
利用Simulink/RTW 的軟件,加入C 語言編譯器,選擇計算機本身作為目標計算機,使用Simulink 的外部模式建立混合運算環境。該系統有如下特點:
1)由Simulink 圖形模型直接生成實時控制程序代碼。
2)控制計算機和目標計算機是同一臺計算機,即節約了經費又減少了程序下載時間。
3)使用外部模式,將Simulink 模型畫面作為系統實時監測與調試界面,設計人員非常熟悉該界面。
4)具有在線實時修改參數的功能。
2.4 軟件平臺
為了實現一體化混合仿真,系統使用的軟件為Microsoft Windows XP SP3、Matlab (包括Matlab、Simulink、Real-Time Workshop 和Real-Time Windows Target)和VC++6.0。
用Simulink 建立系統的結構圖,通過接口與控制對象連接,通過界面中的啟動按鈕,啟動運算程序,系統自動進行數據的記錄和分析,并生成計算后的數據。根據這些數據,再進行控制系統的設計、調整控制器參數,使控制達到設計指標;先使系統工作在仿真狀態下,觀測計算參數對控制模型的控制效果,再連接相應的接口轉換模塊到控制對象,單擊編譯圖標Build, 即可生成實時控制程序,進行實際控制。
3 技術特點
基于DCS的過程實時控制研究平臺具有如下技術特點:
(1)具有可靈活組合被控對象流程的對象系統,包括溫度、壓力、流量、液位等被控熱工參量。
(2)具有完整的保護體系,如電壓型漏電、電流型漏電、鍋爐防干燒保護等,保證設備的使用壽命。
(3)具有工業現場總線的完整結構,包含三層網絡,現場層、控制層和管理層,使用PCI計算機內部總線、PROFIBUS-DP、ETHERNET等總線技術。
(4)具有兩種控制模式下控制效果的對比,在實時研究平臺計算出的對象模型以及控制參數,即可通過本身進行仿真和實際控制;同時,也可將參數設置到DCS控制系統中,對比兩種控制模式下控制效果,分析控制數據。
4 結論
“基于DCS的過程實時控制平臺”,已經投產運行了一段時間,經檢測,該設備性能指標基本達到產品預期設計的要求,在國內處于領先水平。基于該產品具有良好的通用性,包括了溫度、壓力、流量、液位等各種被控熱工參量,且可靈活進行組合,能模擬出各種復雜的工業控制工況,較好地滿足了各高校科研機構對工業現場復雜過程實時控制的教學研究需要,受到了用戶的一致好評,因而具有廣闊的市場前景。對此,我們下一階段的工作,仍將進一步提高產品的各項技術性能指標,爭取產生更好的經濟和社會效益。
【參考文獻】
[1]付家才,滕吉榮.MATLAB 與Excel 在模糊控制中的應用[J].煤礦機械,2009(01).
[2]諸靜.模糊控制原理與應用[M].北京:機械工業出版社,2005.
[3]張靜.MATLAB在控制系統中的應用[M].北京:電子工業出版社,2007.
[責任編輯:湯靜]
