某紅外相機穩定平臺框架結構設計與分析
2016-03-27 05:41:54李全超譚淞年張洪偉
紅外技術 2016年9期
李全超,譚淞年,李 蕾,張洪偉
某紅外相機穩定平臺框架結構設計與分析
李全超,譚淞年,李 蕾,張洪偉
(中國科學院長春光學精密機械與物理研究所 中國科學院航空光學成像與測量重點實驗室,吉林 長春 130033)
針對某紅外相機穩定平臺,設計了兩軸兩框架的結構形式。對相機關鍵支撐結構件照準架進行了較為詳細的結構設計和分析研究。照準架采用一體式半封閉結構,提高了照準架的自身結構剛度,同時避免了大尺寸面的加工變形以及裝調問題。建立了照準架的三維模型,并進行了6重力、常溫和-20℃均勻溫降工況下的靜力學分析和模態分析研究。分析結果顯示,照準架的最大變形為0.706mm,最大應力為47.33MPa;1階模態為53.2Hz,均滿足設計指標。利用有限元軟件為紅外系統照準架的設計可行性提供了理論依據。
紅外相機;穩定平臺;照準架;結構設計;有限元分析
0 引言
作為航空偵察的主要方式之一,機載光電平臺在軍事和民用等諸多領域得到了廣泛應用,具有偵察、導航以及快速捕獲、跟蹤、瞄準運動目標的功能[1]。隨著世界對軍事要求水平的不斷提高,對平臺的輕量化、跟蹤精度以及穩定精度提出了更高的要求。為了解決上述問題獲得比較清晰的圖像,不斷引入了多種技術,諸如在平臺與載機連接之間加入減震措施和引入電子穩像技術等手段[2]。此外除了補償措施,穩定平臺框架自身的結構性能對于獲得清晰的圖像也是至關重要的。鑒于復雜多變的航空環境,對穩定平臺的外形尺寸以及重量均設定了嚴格的要求[3]。
本文主要為某紅外相機設計支撐框架結構,外部支撐框架的結構剛度和強度直接決定內部相機的成像質量。借助有限元分析軟件,對所設計的外部支撐框架照準架進行靜力學分析和模態分析,以此校驗其結構剛度以及強度,為紅外相機支撐框架的設計提供了理論依據。
1 照準架的結構設計
所涉及的紅外相機主要作方位與俯仰方向上的擺掃運動,為此設計的框架結構為兩軸兩框架形式,根據實際相機載荷的尺寸對支撐結構進行了初步設計,具體原理圖及三維圖見圖1。照準架是實現相機俯仰-方位模式的關鍵支撐部件[4]。為了便于照準架的安裝調試方便,將其設計為分體式結構,由位于上端的方位電機座和照準架組合而成來實現相機的擺掃運[5]。方位電機座與照準架之間通過過渡軸,由銷釘和螺釘進行連接。照準架的剛度、強度以及熱穩定性,均會直接影響到整機的剛度和轉動性能。
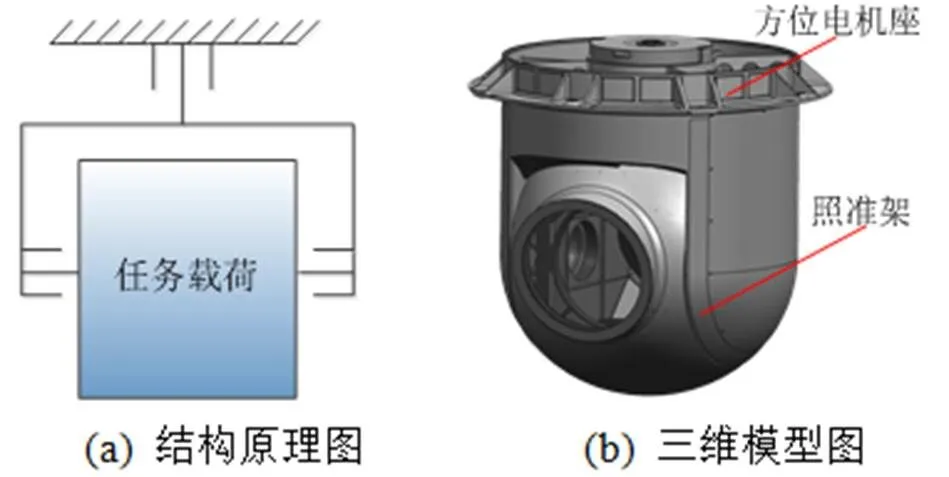
圖1 穩定平臺
支撐組件的核心部件為照準架,如圖2所示為設計的照準架三維圖。考慮到裝機要求,在保證照準架結構剛度的前提下要盡可能減小其外部尺寸和質量。鑒于光學系統是一定的,需要在內部相機支撐框架主鏡筒確定之后來確定照準架外形。
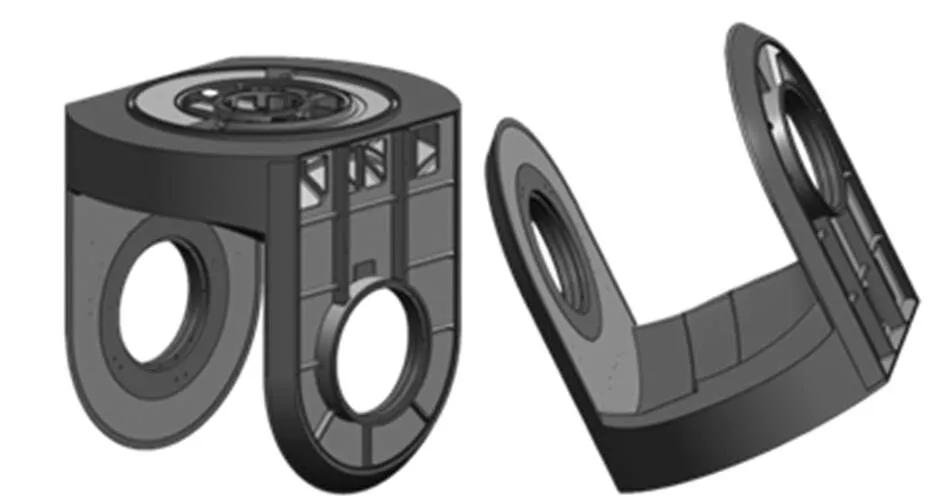
圖2 照準架三維圖
由于光學尺寸較大,不可避免的導致支撐結構尺寸的增大,通過照準架的內凹設計,將探測器的位置避開,使保護球罩的外形尺寸從1044mm降低到910mm,而球罩翹起部分嵌入到照準架中,不影響外部尺寸。照準架上端設計成一體式半封閉結構,內部加筋強化結構剛度,避免了大尺寸面加工的變形與裝調問題,同時提高了照準架的自身結構強度。
照準架借助與方位電機座的連接來實現±90°的方位擺掃運動。俯仰方向設計為雙力矩電機驅動模式,兩懸臂俯仰軸孔鑲嵌鈦合金(TC4)軸承套以安裝軸承。防尺外界環境的溫度變化造成軸承抱死,最終確定的照準架外形尺寸為910mm×736mm×990mm。
2 照準架的有限元分析
2.1 有限元分析理論
2.1.1 靜力學分析理論
在載荷作用下,彈性體內部任意一點的應力可通過6個應力分量、、、、、來表示,其中、、代表正應力;、、代表切應力[6]。應力分量矩陣()見下式:

同理,彈性體內部任一點的應變亦可通過6個應變分量、、、、、來表示,其中、、代表正應變;、、為剪應變。應變分量矩陣()見下式:

彈性體內任一點的位移可通過直角坐標系的3個分量、、表示,矩陣()為:

則位移和應變之間的關系如下:
式中:()代表幾何矩陣;(e)代表單元節點位移矩陣。應力與應變的關系如下式:
為材料的彈性模量,為材料的泊松比。則式(5)中的彈性矩陣()的表達式如下:
根據虛功原理,建立單元剛度方程如式(7)所示,它反映了單元節點力與位移之間的關系:
式中:(e)代表單元節點矩陣;(e)代表單元剛度矩陣。由各個單元剛度方程綜合得到整體剛度方程,進行整體結構分析,得:
式中:()代表整體節點載荷矩陣;()代表整體剛度矩陣;()代表整體節點位移矩陣。通過方程(8)的求解,得到節點位移。根據節點位移,帶入到式(4)和式(6)中計算應力和應變。
2.1.2 模態分析理論
由于結構的阻尼作用對其模態頻率和振型的影響很小[7],可以忽略,模態分析的實質即是求解自由度數目有限的無阻尼及無載荷作用下運動方程的模態矢量,那么系統在無阻尼下的自由振動方程矩陣形式為:

對線性結構系統,式(9)中,[]、[]為實數對稱矩陣,方程含有下面簡諧運動形式的解,具體如下:

式中:{(,,)}代表位移矢量的幅值,定義了位移矢量{}的空間分布;ω代表簡諧運動的角頻率。將式(10)帶入到式(9)中,可得:

式(11)在任意時刻均成立,故可簡化為:

式(12)是典型實特征值問題,{}有非零解的前提是其系數行列式的值為零,即為:
式中:=ω2。求解式(13)可以得到一組離散根(=1,2,…,),將式(13)帶入到式(12)中得到對應矢量{φ}(=1,2,…,),使得下式成立:
=1,2,…,(14)
式中:稱為結構系統的第個特征值,稱{φ}為對應的第個特征矢量。
2.2 模型有限元建模
利用建模軟件UG NX8.0對照準架進行建模,在不影響結果精度的前提下適當對模型進行簡化。考慮到實際工作條件下照準架中間由主鏡筒進行支撐,其對照準架變形尺寸影響較大,在分析的時候只比對變形的大小,利用中空的圓柱將兩懸臂進行連接。對兩種情況下的照準架進行網格劃分,鑒于模型尺寸較大,單元屬性選擇CTETRA(10)。兩種情況下的模型網格劃分情況見圖3,照準架結構的單元數量分別為64274個和75264個,節點數分別為128718個和150258個。

圖3 照準架網格劃分
2.3 材料選擇
由于整機對質量的限定有著嚴格的要求,在保證整機強度的前提下選擇照準架的結構材料[8]。鋁合金材料具有良好的加工工藝性,可以利用現有的加工工藝,如車、銑、磨等對相應的機械零件進行加工,使鋁合金材料易于成型的優點得到充分發揮[9]。此外,鋁合金材料在輕量化設計方面表現優異,可充分對其進行輕量化設計。由于本文所設計的照準架尺寸較大,考慮到質量、成本、加工工藝等要求,選擇鋁合金材料6061作為照準架的主材料。該材料的屈服強度和抗拉強度分別為276MPa和310MPa,其余主要參數性能見表1。

表1 鋁合金6061參數表
2.4 靜力學分析
照準架主要實現方位的轉動,同時為內部相機載荷的俯仰運動提供支撐,其結構穩定性直接干系到紅外相機的成像質量,需要對結構件進行強度校核和變形情況分析,以檢驗設計是否能滿足工程需要[10-11]。根據紅外相機的實際使用工況,主要分為常溫和-20℃環境。考慮到裝機要求,對照準架施加6重力加速度及相關載荷約束,施加邊界條件后的有限元模型如圖4所示。
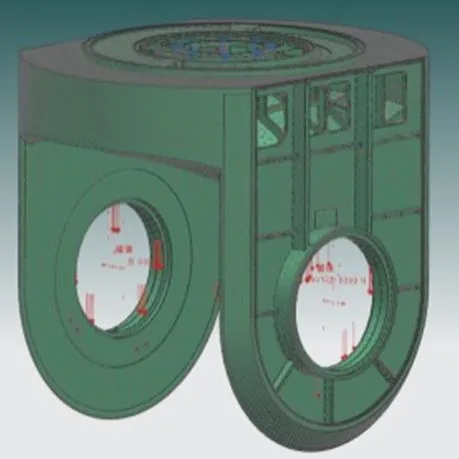
圖4 照準架的有限元模型
照準架使用過程中,通過渡軸與方位電機座進行連接,限制照準架與過渡軸連接部位的自由度,為兩懸臂孔施加內部載荷作用力。分別對兩種工況下的有限元模型進行工程分析,得到照準架的變形云圖和應力云圖分別如圖5和圖6所示。
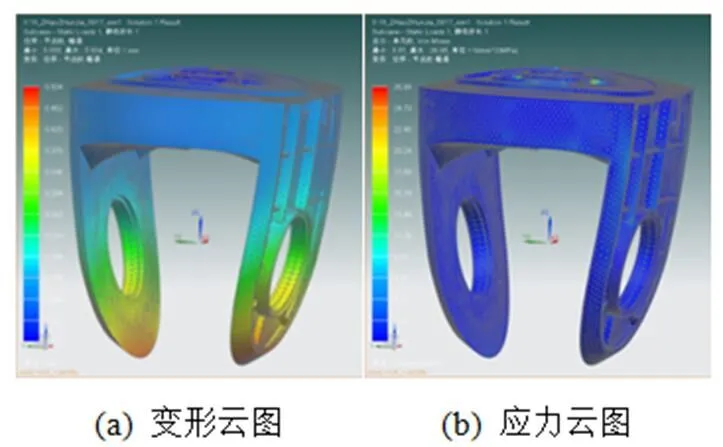
圖5 照準架常溫分析結果
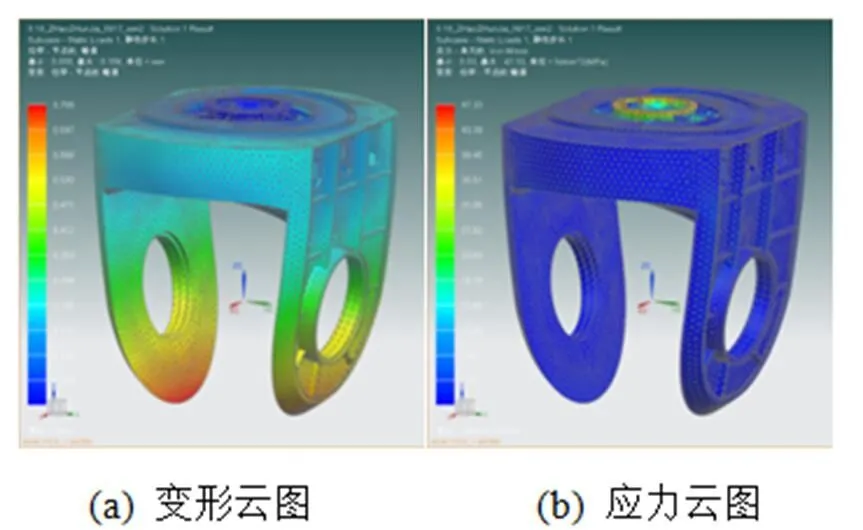
圖6 照準架-20℃均勻溫降分析結果
由分析仿真結果可知,常溫條件下的最大變形產生在照準架來兩對稱懸臂的最下端,為0.504mm,最大應力產生在照準架與過渡軸連接的加強筋部位附近,為26.98MPa,遠小于材料的屈服強度。施加-20℃均勻溫降工況下,照準架的最大變形同樣產生在懸臂最下端,為0.706mm,較常溫工況下有稍微的增加,最大應力產生在與過渡軸連接的部位附近,為47.33MPa,遠小于材料的屈服強度。經過分析,兩種情況下的變形和應力情況,均滿足設計要求,表明照準架工作狀態穩定性良好。
2.5 模態分析
模態分析是研究部件動力學特性的有效方法,是系統辨別方法在工程振動領域中的應用。模態是機械結構件的固有振動特性,每一個模態具有特定的固有頻率、阻尼比和模態振型[12-13]。如若部件的固有頻率和信號頻率相同或者接近,將會使部件的振動擴大,進一步使傳遞到相機載荷上的作用力加大。這個作用力增大效果會傳遞給任意一個配對部件,最終會形成一個振動系統,直接干系到系統的動態特性。造成系統的不穩定。通過合理的優化結構,提高部件的機械諧振頻率,避免與載機產生共振。需要對兩懸臂無連接狀態下的照準架進行模態分析,照準架的前4階模態云圖如圖7所示。
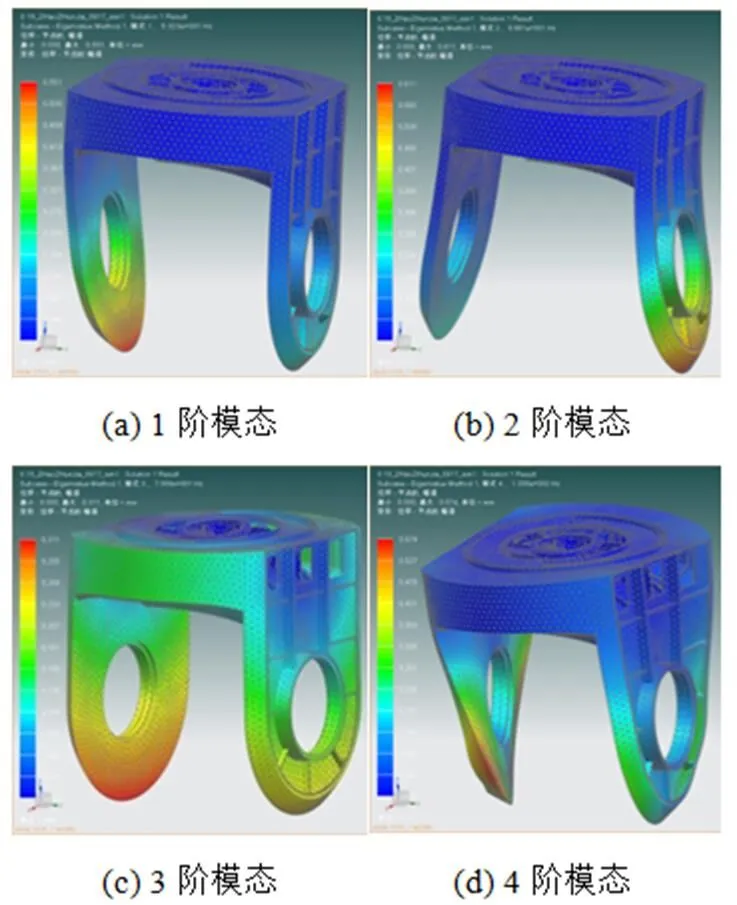
圖7 照準架前4階振型圖
照準架的模態分析結果如表2所示,低階模態直接反應方位框架的剛度特性。由分析結果可知照準架基頻為53.2Hz。將相機剩余部件等效成一個質量塊,經過分析得到相機頻率為29.6Hz,兩種結果均明顯高于穩定平臺控制系統帶寬及載機頻率4.7Hz,避免了共振的產生,提高了相機的抗干擾能力。
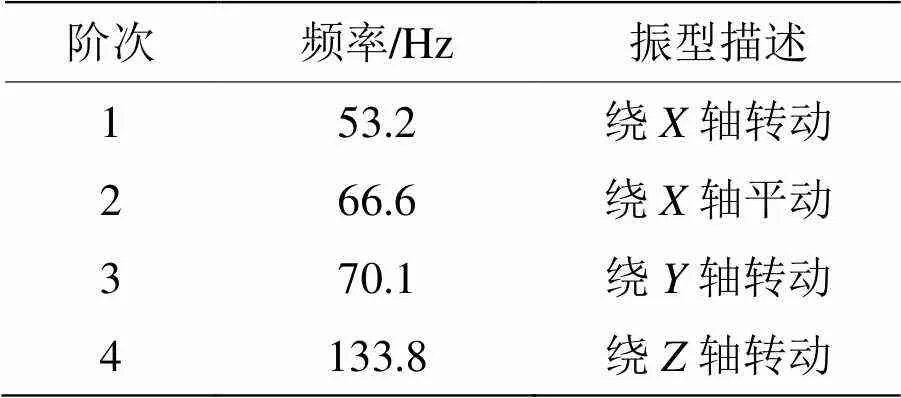
表2 照準架前4階模態分析結果
3 結論
針對某兩軸兩框架紅外相機穩定平臺照準架,進行了較為詳細的結構設計,并建立了有限元仿真模型,分別對模型進行了常溫以及-20℃均勻溫降工況下的靜力學分析和模態分析。分析結果表明:所設計的照準架在6重力、常溫工況下的最大變形和應力分別為0.504mm、26.98MPa;照準架在6重力、-20℃工況下的最大變形和應力分別為0.706mm、47.33MPa。照準架的1階固有頻率為53.2Hz,滿足控制帶寬要求。
[1] 賈平, 張葆. 航空光電偵察平臺關鍵技術及其發展[J]. 光學精密工程, 2003, 11(1): 82-88.
JIA Ping, ZHANG Bao. Critical technologies and their development for airborne opto-electronic reconnaissance platforms[J]., 2003, 11(1): 82-88.
[2] 徐鈺蕾, 王昱棠, 張宇鵬. 機載光電平臺內框架結構預測[J]. 儀器儀表學報, 2014, 35(S1): 73-76.
XU Yulei, WANG Yutang, ZHANG Yupeng. Structure prediction of inner-gimbal in airborne opto-electric platform[J]., 2014, 35(S1): 73-76.
[3] 尹遠. 輕型光電穩定平臺結構設計[J]. 機械設計與制造, 2011, 4: 47-49.
YIN Yuan. Design of the light electro-optical stabilized platform[J]., 2011, 4: 47-49.
[4] 王智. 基于碳纖維復合材料的月基極紫外相機照準架結構設計[J]. 中國光學, 2012, 5(6): 590-595.
WANG Zhi. Design of collimation frame structure for lunar-based extreme ultraviolet camera based on carbon fiber reinforced plastics[J]., 2012, 5(6): 590-595.
[5] 程志峰. 無人機載光電平臺升降結構設計與分析[J]. 儀器儀表學報, 2014, 35(S1): 95-98.
CHENG Zhifeng. Design of ascending and descending structure of photoelectric platform of UAV[J]., 2014, 35(S1): 95-98.
[6] 龍凱, 賈長治, 李寶峰, 等. Patran2010與Nastran2010從入門到精通[M]. 北京: 機械工業出版社, 2013.
LONG Kai, JIA Changzhi, LI Baofeng, et al.20102010[M]. Beijing: China Machine Press, 2013.
[7] 曹妍妍, 趙登峰. 有限元模態分析理論及其應用[J]. 機械工程與自動化, 2007, 1: 73-74.
CAO Yanyan, ZHAO Dengfeng. Finite element modal analysis theory and application[J]., 2007, 1: 73-74.
[8] 王晶東, 于化東, 李妍. 小型無人機載光電穩定平臺框架結構研究[J]. 機械科學與技術, 2014, 33(10): 1602-1608.
WANG Jingdong, YU Huadong, LI Yan. Research on the frame structure of small opto-electronic stabilized platform assembled on a UAV[J]., 2014, 33(10): 1602-1608.
[9] 范磊, 趙勇志, 曹玉巖. 紅外離軸系統金屬反射鏡設計與分析[J]. 紅外技術, 2015, 37(5): 374-379.
FAN Lei, ZHAO Yongzhi, CAO Yuyan. Design and analysis of metal mirror for infrared off-axial system[J]., 2015, 37(5): 374-379.
[10] 王平, 張國玉, 劉家燕, 等. 機載光電平臺內框架拓撲優化設計[J]. 機械工程學報, 2014, 50(13): 135-141.
WANG Ping, ZHANG Guoyu, LIU Jiayan, et al. Topology optimization design for inner frame of airborne electro-optical platform[J]., 2014, 50(13): 135-141.
[11] 劉佳燕. 記載光電平臺風阻分析[J]. 長春理工大學學報:自然科學版, 2011, 34(2): 80-83.
LIU Jiayan. Drag analysis of airborne photoelectric platforms[J].:, 2011, 34(2): 80-83.
[12] 甘至宏, 張葆, 撖芃芃. 機載光電穩定平臺框架結構工程分析[J]. 光學精密工程, 2008, 16(12): 2441-2446.
GAN Zhinghong, ZHANG Bao, KAN Pengpeng. Engineering analysis of airborne optoelectronic platform frame structure[J]., 2008, 16(12): 2441-2446.
[13] 宋冬生, 楊遠成, 高雅, 等. 某穩瞄轉塔結構的有限元模態分析與試驗驗證[J]. 應用光學, 2015, 36(4): 497-502.
SONG Dongsheng, YANG Yuancheng, GAO Ya, et al. FEM modal analysis and test validation for sight-stabilization turret structure[J]., 2015, 36(4): 497-502.
Design and Analysis of Gimbal-structure in an Infrared Camera Stabilized Platform
LI Quanchao,TAN Songnian,LI Lei,ZHANG Hongwei
(,,,,130033,)
A structure of two axes and two frameworks is designed for an infrared-camera stabilized platform. A more detailed structural design and analysis are conducted for sight frame of the camera key support structure. An integrated semi-enclosed structure is used in the sight frame to improve its own structural rigidity, while avoiding the machining deformation and alignment problems of large surface. An azimuth-sweep range of ±90° is achieved, with dual motor drive in pitch direction. A three-dimensional model of sight frame is established, and conditions of the 6gravity, temperature and-20℃ uniform of temperature drop are conducted for static and modal analysis. The results show that the maximum deformation of sight frame is 0.706mm, the maximum stress is 47.33MPa, and 1 order modal shapes is 53.2Hz, which all meet the design specification. The use of finite element software provides a theoretical basis for the design feasibility of sight frame of an infrared sighting system.
infrared camera,stabilized platform,sight frame,structure design,finite element analysis
V243.5
A
1001-8891(2016)09-0728-05
2016-02-01;
2016-03-11.
李全超(1988-),碩士,研究實習員,主要從事光機結構設計與分析方面的工作。E-mail:liquanchao-love@163.com。
國家自然科學基金青年科學基金項目(61405192);中國科學院國防科技創新基金項目(CXJJ-15S158)。
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:39
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18