氣動閥門定位器控制系統的研究
2016-03-22 04:03:34唐文軍劉俊清
環球市場 2016年35期
唐文軍 劉俊清
江南閥門有限公司
氣動閥門定位器控制系統的研究
唐文軍 劉俊清
江南閥門有限公司
氣動調節閥就是以壓縮空氣為動力源,以氣缸為執行器,并借助于閥門定位器、轉換器、電磁閥、保位閥等附件去驅動閥門,實現開關量或比例式調節,接收工業自動化控制系統的控制信號來完成調節管道介質的流量、壓力、溫度等各種工藝參數。氣動調節閥的特點就是控制簡單,反應快速,且本質安全,不需另外再采取防爆措施。基于此,本文將著重分析探討氣動閥門定位器控制系統,以期能為以后的實際工作起到一定的借鑒作用。
氣動閥門;定位器;系統
1 、氣動調節閥概述
氣動調節閥就是以壓縮空氣為動力源,以氣缸為執行器,并借助于閥門定位器、轉換器、電磁閥、保位閥等附件去驅動閥門,實現開關量或比例式調節,接收工業自動化控制系統的控制信號來完成調節管道介質的流量、壓力、溫度等各種工藝參數。它是石油、化工、電力、冶金等工業企業廣泛使用的工業過程控制儀表之一。化工生產中調節閥在調節系統中是必不可少的,它是組成工業自動化系統的重要環節,它如生產過程自動化的手腳。
2 、氣動閥門定位器控制系統
2.1 氣動閥門定位器硬件構成
2.2.1 壓電閥。壓電閥是里面的壓電陶瓷發生形變,研制出的一款兩位H通的控制閥。單片機控制驅動電路對壓電閥進行控制使其法到關斷的作巧,一般的給壓電閥提供足夠的電壓,其就能進行動作,功耗消耗很少幾乎為零。它的動作原理如下:沒有電壓時候如圖1加上電壓時候如圖2所示,壓電閥中由壓電陶瓷晶體當處于電場中時候產生了變形,從而達到氣動閥的開關作用。壓電閥在掉電的狀態是圖1中PV:OFF的模式,此時壓電陶瓷片作用在進氣口2,切斷氣源,1和3先導腔連通,輸出口1經排氣日3通大氣。當壓電閥通電工作時,壓電陶瓷片上翅,工作狀態是圖1的PV:ON狀態,排氣口3被堵住,1和2連通構成一個整體,這就好像一個兩位H通的換向閥,用來控制閥口的開關。
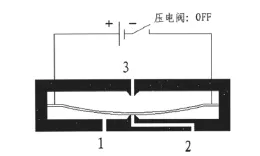
圖1 壓電闡掉電狀態
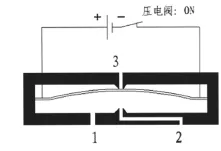
圖2 壓電閥通電狀態
2.2.2 氣動執行單元。氣動執行單元式控制系統中的主要控制部件,它是里面包括調節閥和氣化。一般的調節閥有兩位兩通和兩位蘭通,本文中用的是兩位H通的,兩位對格的是大氣或者接氣源,在PWM脈沖控制下,兩位交替工作,并且讓氣缸里面的活塞一直是處于氣室平衡點的左右位置,進而對其進行了控制。它接受的是控制單元的輸出信號,并且把其變化成角度或者直線位移,調節閥的通道口的大小被改變,接著對輸入和輸出的流量進行控制,完成對變量的自動控制。
2.2 氣動閥門定位器的軟件設計
2.2.1 氣動閥門定位器功能規劃。參照標準產品功能配置,本文氣動閥門定位器只針對直行程特定調節閥對象而設計,部分參數在處理單元內部初始化設定,所以本設計人機監控界面功能包含全部基本參數操作和部分特殊參數功能,模式配置規劃為自動模式、手動模式、組態模式和閥門模式。自動模式初始化默認設置參數和狀態,顯示當前行程、設定信號、占空比和動態偏差手動模式實現切換到手動輸入設定信號、手動輸入設定值的操作和正反作用方式的選取組態模式完成參數的整定和分程值的輸入閥門模式功能包含流量特性選擇、死區設定、報警處理功能、信號報警下限和信號報警上限參數修改。
2.2.2 氣動閥門定位器軟件系統任務設計。采用μC/OS -II實時操作系統,在編寫系統的程序之前,必須要對系統任務進行劃分并安排優先級。任務劃分的目標是:1)滿足實時性能。即在最壞的情況下系統中所有對實時性有要求的功能都能正常實現。2)任務數目要合理。任務數目過多每個任務要實現的功能就簡單,任務設計簡單,但任務方的調度操作與任務間的通信活動增加,使系統運行效率低,資源開銷大,任務數目過少,則每個任務需要實現的功能就繁雜,但可免除不少通信工作,減少共享資源數量,減輕操作系統的負擔,減少資源開銷。3)簡化軟件系統。一個任務要實現其功能,除了需要操作系統的調度功能支持外,還需要操作系統的其他服務功能,如時間管理功能、任務之間的同步功能、任務之間的通信功能、內存管理功能等,合理劃分任務,可以減少對操作系統的服務要求,使系統的功能得到裁剪,簡化軟件系統,簡小代碼規模。4)降低資源需求。合理劃分任務,減少或簡化任務之間的同步和通信要求,就可以減少相應數據結構的內存規模,從而降低對系統資源的需求。
總而言之,閥門定位器是調節閥控制系統中的核心部件,它與調節閥、傳感器等一起構成一個閉環控制回路。 閥門靜態特性和動態特性的不同直接影響了閥門的質量特性,特別是具有流量調節作用的調節閥。 閥門定位器的使用有助于克服流體介質的擾動和閥門填料的摩擦力,可提高系統控制精度,同時增加控制的靈活性。 氣動調節閥也是石油、化工、電力、冶金等工業企業廣泛使用的工業過程控制儀表之一。這就要求我們在以后的實際工作中必須對其實現進一步研究探討。
[1]董盛昕. 開關閥控雙作用式氣動閥門定位器控制研究[D].哈爾濱工業大學,2013.
[2]孫冰恒. 雙作用式開關閥控氣動閥門定位器控制研究[D].哈爾濱工業大學,2008.
[3]趙明南. 均熱爐排煙閥門智能定位器控制系統的研究[D].武漢科技大學,2014.
[4]武自才,郭萬軍. 智能閥門定位器控制系統設計[J]. 儀器儀表標準化與計量,2006,06:39-41.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
儀器儀表用戶(2022年10期)2022-09-29 04:36:58
儀器儀表用戶(2022年9期)2022-08-30 05:39:48
流程工業(2022年3期)2022-06-23 09:41:08
儀器儀表用戶(2022年4期)2022-04-01 03:17:02
煤氣與熱力(2021年3期)2021-06-09 06:16:18
石油化工自動化(2018年5期)2018-11-14 02:34:26
中國科技論壇(2017年7期)2017-07-25 08:49:53
中學科技(2014年11期)2014-12-25 07:38:53
太空探索(2014年3期)2014-07-10 14:59:39