液壓挖掘機(jī)參數(shù)化姿態(tài)控制系統(tǒng)
2016-03-22 22:11:49呂彭民吳玉文張蓓
筑路機(jī)械與施工機(jī)械化 2016年3期
關(guān)鍵詞:參數(shù)化
呂彭民 吳玉文 張蓓

摘要:通過VB控制SolidWorks中液壓挖掘機(jī)各液壓缸長(zhǎng)度參數(shù),實(shí)現(xiàn)液壓挖掘機(jī)姿態(tài)的參數(shù)化控制,并對(duì)模型的建立、系統(tǒng)的設(shè)定以及關(guān)鍵技術(shù)進(jìn)行闡述。通過參數(shù)化姿態(tài)控制系統(tǒng),在SolidWorks中自動(dòng)裝配出用戶指定姿態(tài)的液壓挖掘機(jī)幾何模型,用戶可以將該幾何模型導(dǎo)入有限元軟件Ansys中進(jìn)行有限元分析,解決了有限元分析時(shí)挖掘機(jī)姿態(tài)難以調(diào)節(jié)的問題。
關(guān)鍵詞:液壓挖掘機(jī);姿態(tài);參數(shù)化;SolidWorks
中圖分類號(hào):U415.51文獻(xiàn)標(biāo)志碼:B
Abstract: The length parameters of hydraulic cylinders in SolidWorks were controlled by VB in order to command the stance of hydraulic excavator. With this system, the geometric model of hydraulic excavator with the userspecified stance can be automatically assembled in SolidWorks. The users can import the geometric model above into the software Ansys to carry out the finite element analysis. The system solves the problem that the stance of hydraulic excavator is difficult to change during the finite element analysis.
Key words: hydraulic excavator; stance; parameterization; SolidWorks
0引言
在研究液壓挖掘機(jī)載荷譜的過程中,通過對(duì)工作裝置的運(yùn)動(dòng)、力學(xué)分析,總結(jié)出載荷力的傳遞規(guī)律,并在此基礎(chǔ)上通過實(shí)際的載荷標(biāo)定,建立載荷的回歸方程,實(shí)現(xiàn)實(shí)時(shí)應(yīng)力測(cè)試向載荷測(cè)試的轉(zhuǎn)變[12]。在進(jìn)行實(shí)際的載荷標(biāo)定試驗(yàn)前,需要在有限元分析軟件Ansys中對(duì)不同姿態(tài)的液壓挖掘機(jī)仿真模型進(jìn)行受力分析,模擬實(shí)際加載過程,建立在Ansys環(huán)境下的載荷的回歸方程,從而預(yù)先驗(yàn)證試驗(yàn)方案的準(zhǔn)確性。由于擬合載荷的回歸方程需要大量的不同姿態(tài)的數(shù)據(jù),所以需要對(duì)多種姿態(tài)的液壓挖掘機(jī)仿真模型進(jìn)行受力分析;而且,在液壓挖掘機(jī)設(shè)計(jì)過程中,也需要對(duì)不同姿態(tài)的仿真模型進(jìn)行受力分析;但是,在Ansys中準(zhǔn)確控制液壓挖掘機(jī)姿態(tài)是相對(duì)比較困難的,也會(huì)加大工作的重復(fù)性。
利用三維參數(shù)化技術(shù),基于VB和SolidWorks設(shè)計(jì)了液壓挖掘機(jī)參數(shù)化姿態(tài)控制系統(tǒng)。在裝配過程中對(duì)相關(guān)配合進(jìn)行參數(shù)化,得到液壓挖掘機(jī)部件間不同的裝配關(guān)系,實(shí)現(xiàn)對(duì)液壓挖掘機(jī)姿態(tài)的參數(shù)化控制。通過此系統(tǒng),可以在SolidWorks中自動(dòng)裝配出用戶指定姿態(tài)的液壓挖掘機(jī)幾何模型,用戶可以將該幾何模型導(dǎo)入有限元軟件Ansys中進(jìn)行受力分析。
由于在擬合載荷的回歸方程時(shí)需要把相關(guān)力的力臂作為一個(gè)輸入量,因此需要得到各姿態(tài)下準(zhǔn)確的力臂數(shù)值。力臂可以通過理論計(jì)算得出,但是對(duì)已建好的對(duì)應(yīng)姿態(tài)的幾何模型,具有直接測(cè)量最為方便。通過本系統(tǒng),可以快速建立對(duì)應(yīng)姿態(tài)的液壓挖掘機(jī)幾何模型,并利用SolidWorks的良好操作性的測(cè)量功能,直接測(cè)得相關(guān)力臂,準(zhǔn)確而且方便、快捷。
1基于VB的SolidWorks二次開發(fā)
1.1基于VB的SolidWorks零部件參數(shù)化建模
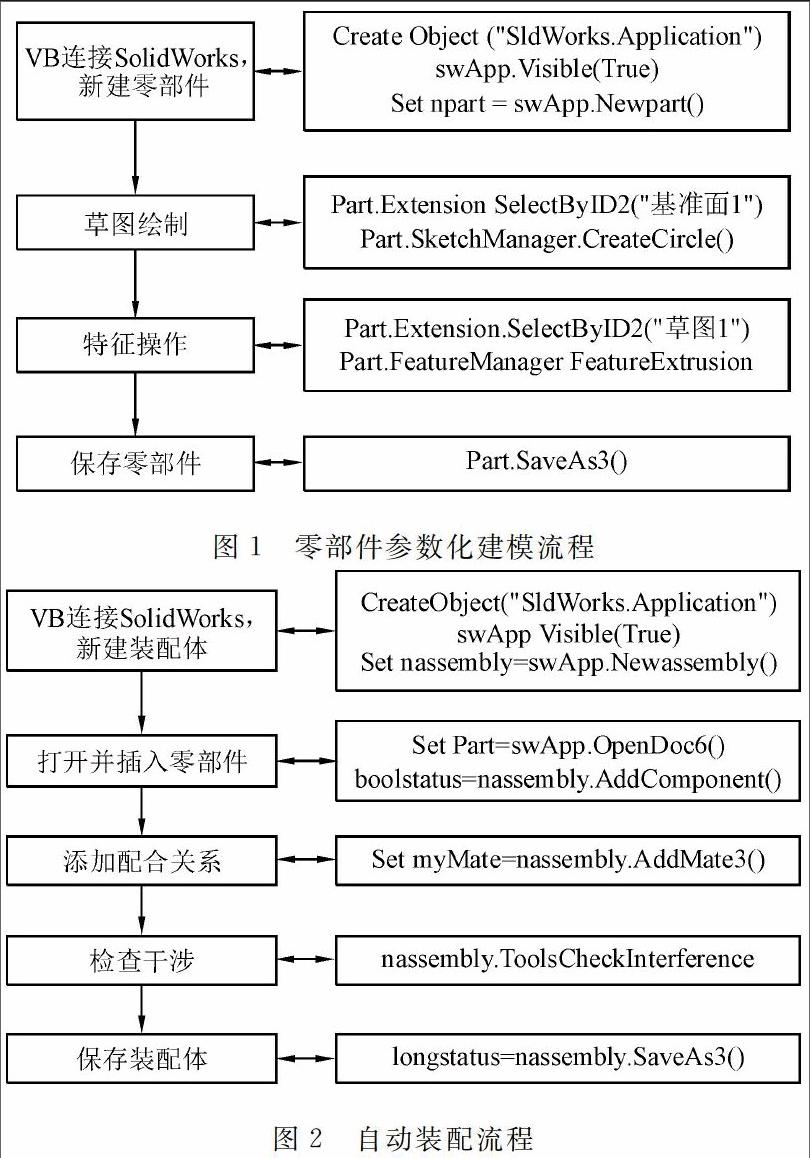
以圓柱體零件為例,其參數(shù)化建模流程如圖1所示。
1.2基于VB的SolidWorks自動(dòng)裝配
自動(dòng)裝配過程主要包括以下幾個(gè)步驟:VB連接SolidWorks,新建裝配體;插入零部件;添加配合關(guān)系;檢查干涉;完成裝配并保存[2]。自動(dòng)裝配流程如圖2所示。
2參數(shù)化姿態(tài)控制系統(tǒng)的建立
2.1模型的建立
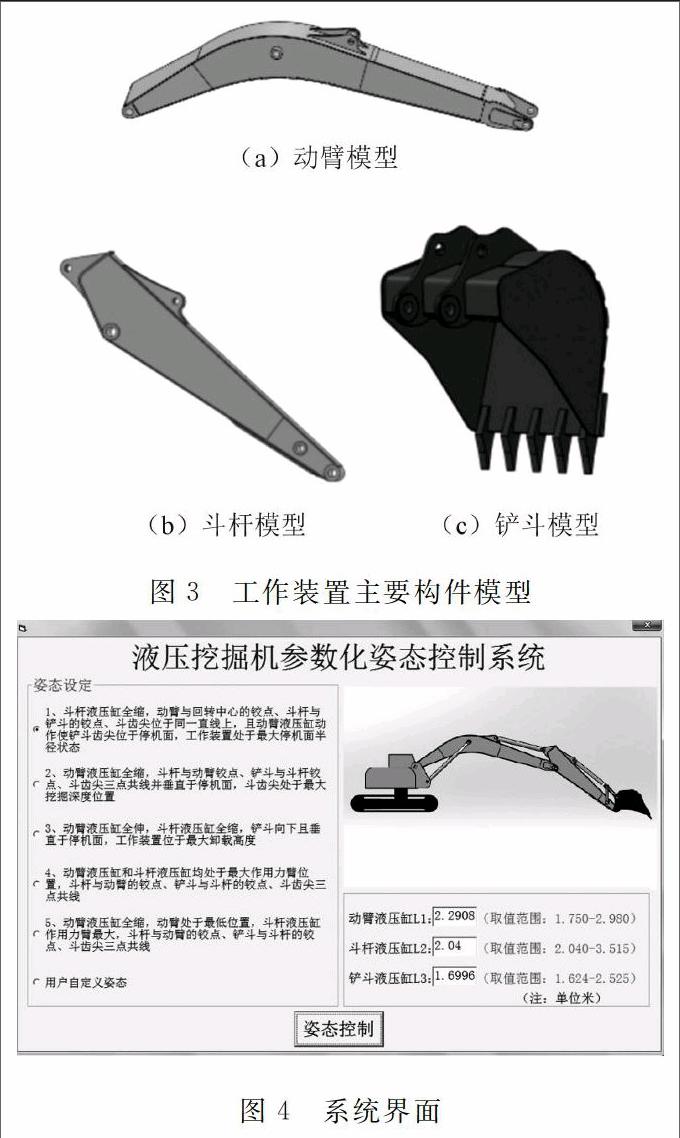
利用三維軟件SolidWorks建立挖掘機(jī)工作裝置、回轉(zhuǎn)平臺(tái)和底架的三維模型。工作裝置由動(dòng)臂、斗桿、鏟斗和相應(yīng)的液壓缸組成。工作裝置主要構(gòu)件模型如圖3所示。
在建立三維模型時(shí),要考慮在有限元中分析時(shí)的要求。為減小有限元分析的計(jì)算量,在保證挖掘機(jī)工作裝置、回轉(zhuǎn)平臺(tái)和底架的力學(xué)性能的基礎(chǔ)上,根據(jù)上述部件的結(jié)構(gòu)特點(diǎn)進(jìn)行簡(jiǎn)化[3]。
(1) 忽略螺紋孔和對(duì)結(jié)構(gòu)應(yīng)力分布影響很小的倒角、運(yùn)輸?shù)醵⒓?xì)微的斜面等。
(2) 由于動(dòng)臂、斗桿、回轉(zhuǎn)平臺(tái)等部件都是焊接結(jié)構(gòu),在建模過程中,將焊縫處做連續(xù)處理,其材料與母材做相同處理。
(3) 由于在研究載荷譜時(shí)主要是對(duì)工作裝置進(jìn)行受力分析,因此回轉(zhuǎn)平臺(tái)和底架也做了相應(yīng)的簡(jiǎn)化處理。
(4) 液壓挖掘機(jī)工作裝置的各部件是通過銷軸相連,通過銷軸在各部件之間傳遞力和運(yùn)動(dòng),在對(duì)工作裝置進(jìn)行整體有限元分析時(shí)要進(jìn)行鉸接的處理。推薦選用梁?jiǎn)卧狟EAM188模擬銷軸,并通過節(jié)點(diǎn)耦合的方法對(duì)鉸接進(jìn)行模擬。在有限元分析中通過SECTIONS定義不同半徑的實(shí)心圓模擬不同半徑的銷軸。在模擬鉸接時(shí)需要對(duì)UX、UY、UZ、RTOX、RTOY五個(gè)自由度進(jìn)行約束,釋放Z方向的旋轉(zhuǎn)自由度[4]。所以,未在SolidWorks中直接建立銷軸模型。
2.2系統(tǒng)的設(shè)定
如圖4所示,系統(tǒng)界面主要由3部分組成,左側(cè)為姿態(tài)設(shè)定區(qū),右上部為對(duì)應(yīng)姿態(tài)的圖像展示區(qū),右下部為液壓缸長(zhǎng)度輸入?yún)^(qū)。
在液壓挖掘機(jī)實(shí)際作業(yè)過程中,存在多種挖掘姿態(tài),需要注意液壓挖掘機(jī)最危險(xiǎn)的姿態(tài),以免因出現(xiàn)工作裝置部件的斷裂造成重大損失。液壓挖掘機(jī)在實(shí)際工作過程中,各液壓缸之間可實(shí)現(xiàn)不同的組合,挖掘姿態(tài)可達(dá)數(shù)萬(wàn)種。
在姿態(tài)設(shè)定區(qū)設(shè)置了6個(gè)Option單選控件,Option1~Option5對(duì)應(yīng)上述的5種典型液壓挖掘機(jī)姿態(tài),Option6對(duì)應(yīng)用戶自定義姿態(tài)[56]。如圖4所示,在運(yùn)行程序時(shí),當(dāng)選定Option1時(shí),右側(cè)Image控件載入Option1所對(duì)應(yīng)的姿態(tài)圖片。此時(shí),在液壓缸長(zhǎng)度輸入?yún)^(qū)會(huì)自動(dòng)顯示出Option1對(duì)應(yīng)的典型姿態(tài)的各液壓缸長(zhǎng)度,最終自動(dòng)在SolidWorks中形成圖4圖像展示區(qū)所示姿態(tài)的液壓挖掘機(jī)裝配體模型。
同理,當(dāng)選定Option2~Option5時(shí),Image控件載入對(duì)應(yīng)的姿態(tài)圖片,在液壓缸長(zhǎng)度輸入?yún)^(qū)會(huì)自動(dòng)顯示出對(duì)應(yīng)的典型姿態(tài)的各液壓缸長(zhǎng)度,最終自動(dòng)在SolidWorks中形成如圖5所示的相應(yīng)姿態(tài)的液壓挖掘機(jī)裝配體模型。當(dāng)選定Option6時(shí),為用戶自定義姿態(tài),用戶在液壓缸長(zhǎng)度輸入?yún)^(qū)指定位置輸入各液壓缸長(zhǎng)度,最終自動(dòng)在SolidWorks中形成用戶指定姿態(tài)的液壓挖掘機(jī)裝配體模型。
2.3系統(tǒng)的關(guān)鍵技術(shù)
系統(tǒng)程序運(yùn)行主要包括幾個(gè)步驟:VB連接SolidWorks,打開各液壓缸子裝配體;在各液壓缸子裝配體中添加參數(shù)化的距離配合關(guān)系(若程序非首次運(yùn)行,則首先自動(dòng)刪除上次調(diào)節(jié)姿態(tài)過程中添加的參數(shù)化的距離配合關(guān)系,再重新添加);檢查干涉;完成各液壓缸子裝配體的裝配并保存;打開液壓挖掘機(jī)整機(jī)裝配體,并重建模型;檢查干涉;完成整機(jī)裝配體的裝配并保存。下面以動(dòng)臂液壓缸子裝配體和整機(jī)裝配體相關(guān)主要程序?yàn)槔M(jìn)行解釋。
(1) 動(dòng)臂液壓缸子裝配體主要相關(guān)程序:
Set nassembly = swApp.OpenDoc6
("D:\\he\\boom cylinder.SLDASM",……)/打開動(dòng)臂液壓缸子裝配體
boolstatus = nassembly.Extension.
SelectByID2("距離1", "MATE",……)
nassembly.EditDelete/選中上次調(diào)節(jié)姿態(tài)過程中已添加的參數(shù)化的距離配合關(guān)系,并刪除
boolstatus = nassembly.Extension.
SelectByID2("Point1@原點(diǎn)",……)/選中動(dòng)臂液壓缸缸筒零件原點(diǎn)(在前期裝配過程中,已將缸筒零件原點(diǎn)與子裝配體原點(diǎn)重合)
boolstatus = nassembly.Extension.
SelectByID2("Point1@原點(diǎn)@cylinder rod1@boom cylinder",……)/選中動(dòng)臂液壓缸活塞桿零件原點(diǎn)
Set myMate = nassembly.AddMate3(5, 1, False, Val(Text1.Text),……)/將上述2個(gè)原點(diǎn)作為對(duì)象添加參數(shù)為Val(Text1.Text)距離配合關(guān)系
nassembly.EditRebuild3/重建模型
nassembly.ToolsCheckInterference/檢查干涉
longstatus = nassembly.SaveAs3
("D:\\he\\boom cylinder.SLDASM", 0, 2)/保存動(dòng)臂液壓缸子裝配體
(2) 整機(jī)裝配體主要相關(guān)程序:
Set nassembly = swApp.OpenDoc6
("D:\\he\\he.SLDASM",……)/打開整機(jī)裝配體
nassembly.EditRebuild3/重建模型
nassembly.ToolsCheckInterference/檢查干涉
longstatus = nassembly.SaveAs3
("D:\\he\\he.SLDASM", 0, 2)/保存整機(jī)裝配體
3結(jié)語(yǔ)
本文首先分析了基于VB的SolidWorks二次開發(fā)技術(shù)。此項(xiàng)技術(shù)是一種三維參數(shù)化建模技術(shù),實(shí)用價(jià)值高,有助于減少設(shè)計(jì)人員的工作量,提高產(chǎn)品研發(fā)效率。文章將此項(xiàng)技術(shù)應(yīng)用于工程實(shí)際,對(duì)液壓挖掘機(jī)參數(shù)化姿態(tài)控制系統(tǒng)進(jìn)行了研究和開發(fā)。實(shí)踐證明,該系統(tǒng)有以下特點(diǎn)。
(1) 實(shí)現(xiàn)了液壓挖掘機(jī)姿態(tài)控制的程序化和自動(dòng)化。
(2) 操作簡(jiǎn)單,能方便快捷地幫助用戶準(zhǔn)確地參數(shù)化控制液壓挖掘機(jī)姿態(tài)。
(3) 在相關(guān)研究中可以充分利用SolidWorks測(cè)量等其他功能。
(4) 可以服務(wù)于液壓挖掘機(jī)載荷譜的研究和挖掘機(jī)的設(shè)計(jì)工作,滿足了相關(guān)工程的實(shí)際需要。
(5) 開發(fā)思路可以應(yīng)用于其他需要大量重復(fù)性數(shù)據(jù)的工程研究。
參考文獻(xiàn):
[1]滕毅敏.挖掘機(jī)工作裝置的載荷譜測(cè)試研究[D].杭州:浙江大學(xué),2011.
[2]陳進(jìn),慶飛,龐曉平.基于作業(yè)路徑的液壓挖掘機(jī)挖掘性能[J].長(zhǎng)安大學(xué)學(xué)報(bào):自然科學(xué)版,2014,34(2):115119.
[3]易炳剛,汪雪.基于VB的SolidWorks自動(dòng)裝配技術(shù)研究[J].機(jī)械工程及自動(dòng)化,2013(1):9496.
[4]杜文婧.液壓挖掘機(jī)工作裝置設(shè)計(jì)關(guān)鍵技術(shù)研究[D].長(zhǎng)春:吉林大學(xué),2007.
[5]凌桂龍,沈再陽(yáng).ANSYS結(jié)構(gòu)單元與材料應(yīng)用手冊(cè)[M].北京:清華大學(xué)出版社,2013.
[6]劉本學(xué).液壓挖掘機(jī)反鏟工作裝置的有限元分析[D].西安:長(zhǎng)安大學(xué),2007.
[責(zé)任編輯:王玉玲]
猜你喜歡
湖南大學(xué)學(xué)報(bào)·自然科學(xué)版(2017年2期)2017-03-17 14:17:10
環(huán)球人文地理·評(píng)論版(2016年9期)2017-03-15 20:12:07
科技創(chuàng)新導(dǎo)報(bào)(2016年25期)2017-03-13 04:20:08
中國(guó)科技縱橫(2017年1期)2017-03-10 21:22:07
汽車科技(2016年6期)2016-12-19 20:32:56
湖南大學(xué)學(xué)報(bào)·自然科學(xué)版(2016年10期)2016-11-30 00:47:41
建材發(fā)展導(dǎo)向(2016年5期)2016-10-19 13:55:00
哈爾濱理工大學(xué)學(xué)報(bào)(2016年1期)2016-05-31 00:32:13
中國(guó)科技博覽(2016年7期)2016-04-25 10:24:33
計(jì)算機(jī)時(shí)代(2016年3期)2016-03-21 12:57:42
