直線電機的二自由度雙模糊PID 自整定控制器研究
2016-03-17 07:00:04余海濤
電氣技術 2016年2期
程 帆 余海濤
(東南大學,南京 210096)
?
直線電機的二自由度雙模糊PID 自整定控制器研究
程帆 余海濤
(東南大學,南京210096)
摘要直線電機在高精度直線運動場合作為驅動裝置時,采用傳統的PID控制難以滿足精度和動態響應的要求。本文在結合模糊自整定PID控制和二自由度PID控制的基礎上,提出了一種新型的基于目標值濾波型二自由度雙模糊PID自整定控制器用以滿足高精度場合下的直線電機控制。并通過Matlab/Simulink搭建了模型并進行了仿真,仿真結果表明:該控制器相比PID控制和模糊自整定PID控制具有更好的動態性能,具有較小的超調量和較快的響應速度,驗證了設計方案的可行性。
關鍵詞:直線電機;雙模糊;PID;二自由度
直線電機作為高端數控機床的驅動裝置,由于較高的效率和可靠性而得到了較快的發展。而在目前的直線電機伺服系統中,主要采用PID控制方式,該控制方式的主要優勢體現在以下幾點:結構簡單、控制效果良好,硬件易于實現。但由于直線電機作為強耦合、非線性、多變量的復雜系統,簡單的PID控制器難以滿足高精度場合的動態性能要求。為了實現更好的控制效果,近年來快速發展的模糊控制就被引入到直線電機的伺服系統中[1],該方法同PID整定結合的模糊自整定PID控制器具有在線整定的效果,可以實現控制性能的優化。同時,目標值濾波型二自由度控制具有無需改變原PID控制器結構的特點,也是一種易于實現的提高PID控制精度的策略[2]。本文將上述兩種控制策略相結合,提出了目標值濾波型二自由度雙模糊PID自整定控制器,該型控制器的仿真結果表明其動態響應性能要優于PID控制和模糊自整定PID控制,具有較為理想的控制精度和響應速度。
1 直線電機的數學模型
直線電機的作用原理可以視為旋轉電機沿半徑方向剖開之后再沿直線展開,它的電壓平衡、機械和電磁力方程如式(1)至式(3)所示:
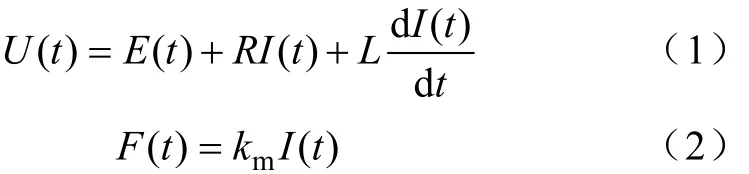

式中,

上式中各物理量的定義分別為:U(t)為電源電壓,E(t)為反電動勢,R為線圈導體電阻,I(t)為回路電流,L為線圈導體漏電感,kE為反電動勢常數,x(t)為直線電機的位移,F(t)為線圈受到的電磁力,km為直線電機的力常數,m為直線電機動子的質量,c為直線導軌的粘滯摩擦系數,k為彈簧的勁度系數,V(t)為直線電機的直線運動的速度。
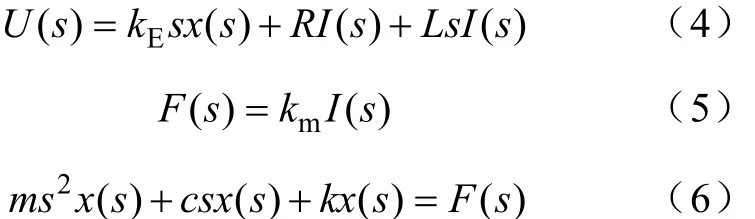
將上述三式進行拉普拉斯變換可得從而得到直線電機動態數學模型,如圖1所示。
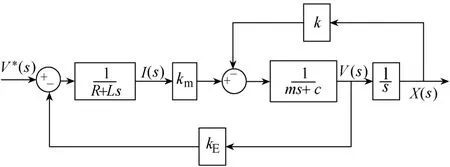
圖1 直線電機數學模型
2 雙模糊自整定PID控制器
傳統的PID控制參數kP、kI、kD都是固定參數,通過三個參數的調整來實現控制性能的優化。但是在復雜的非線性系統中,很難保證整體優化的控制效果。而模糊自調整PID控制是在PID控制的基礎上,通過模糊理論由輸入量誤差e和誤差變化率ec計算出PID參數對應的調整量,從而實現PID參數的在線整定。該方法易于實現且誤差動作的影響較小,所以可以較好地應用于直線電機的高精度伺服系統。圖2是模糊自整定PID控制器的結構,該方法通過計算輸入變量ec和e來得出kP、kI和kD的調整量,實現PID控制器的在線調整從而獲得更好的控制性能。
雙模糊控制器是在原有的模糊自整定PID控制器的基礎上,為實現更好的動態性能和控制精度而采用的一種控制策略[3]。該策略主要用于解決響應速度和精度之間的矛盾,實現在偏差較大時的快速響應,較小偏差時穩態精度較高。雙模糊控制器的結構圖如圖2所示,當偏差e大于或等于e0時,模糊控制器1作用;偏差滿足e小于e0時,模糊控制器2作用,從而實現PID參數的“粗調”和“精調”的功能。
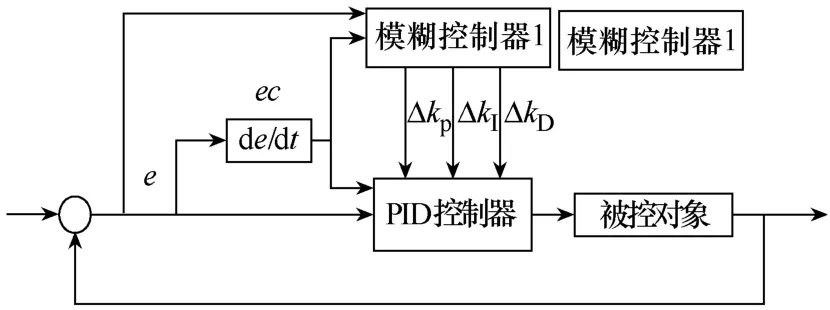
圖2 模糊自整定PID控制器結構
對于偏差、偏差變化率以及控制量的語言變量模糊化處理采用如下7個變量來描述:正大PB,正中PM,正小PS,零Z,負小NS,負中NM,負大NB。模糊控制器1的誤差和誤差變化率的隸屬度函數如圖3所示,模糊控制器2的誤差和誤差變化率的歸一化基本論域為[?3, 3]和[?1, 1]。
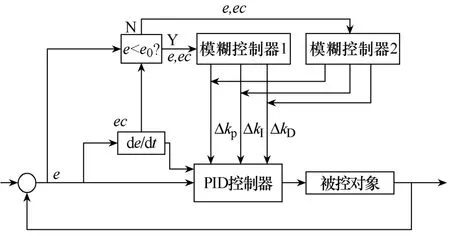
圖3 雙模糊自整定PID控制器結構
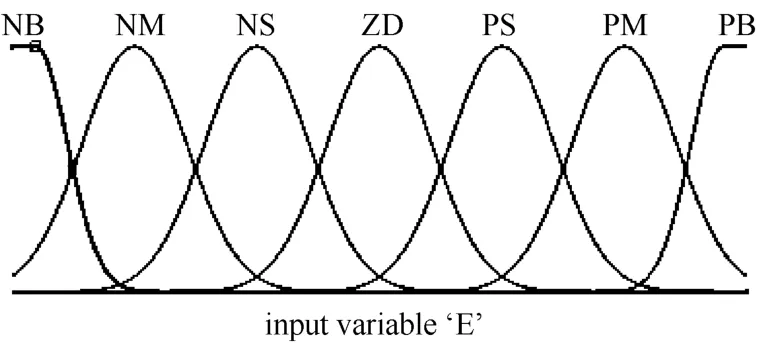
圖4 偏差的隸屬度函數

圖5 偏差變化率的隸屬度函數
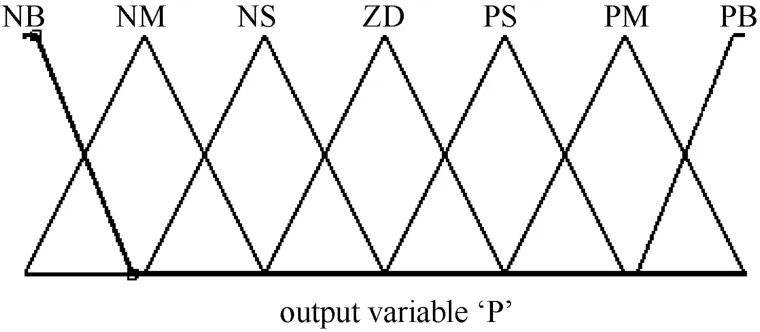
圖6 控制量(比例)的隸屬度函數
模糊規則的推理采用Mamdamni直接推理法,對于PID參數的推理規則用如下語句:
Ri: if e=Ai and ec=Bi
Then kp=Ci and ki=Di and kd=Fi (i=1,2,3…)
其中e,ec以及PID參數的模糊子集為{NB,NM,NS,Z,PS,PM,PB},而對應的模糊規則見表1。
再將分別將模糊規則導入模糊控制器1和模糊控制器2,再選擇e0作為模糊控制器的切換點。當e>e0,模糊控制器1產生作用;當e0<e0,模糊控制器2產生作用,從而得到雙模糊控制器。
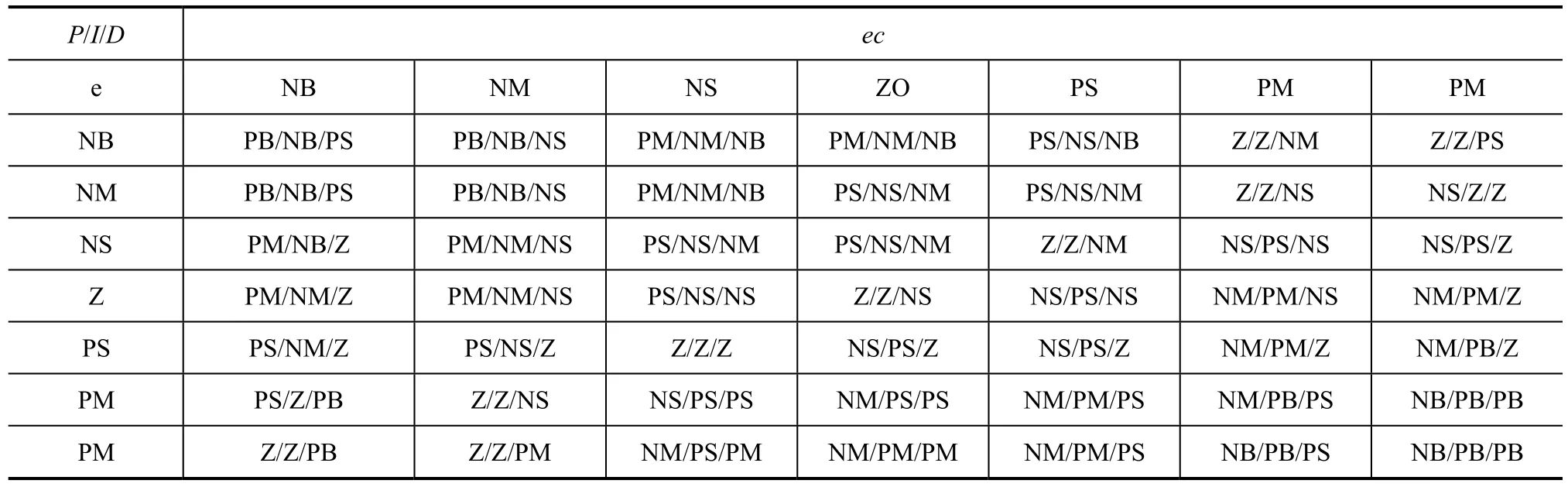
表1 模糊規則表
3 目標值濾波型二自由度控制
二自由度PID控制器是通過兩組獨立的PID參數控制來實現目標值跟蹤特性和干擾抑制特性的平衡。相比于傳統的單自由度PID控制器,二自由度PID控制器通過兩組PID控制參數來控制系統的輸出。目前較為常用的二自由度PID控制方式有前饋型二自由度PID控制方式,目標值濾波型二自由度控制和不完全微分型二自由度PID控制。其中,目標值濾波型二自由度PID控制的結構如圖7所示。
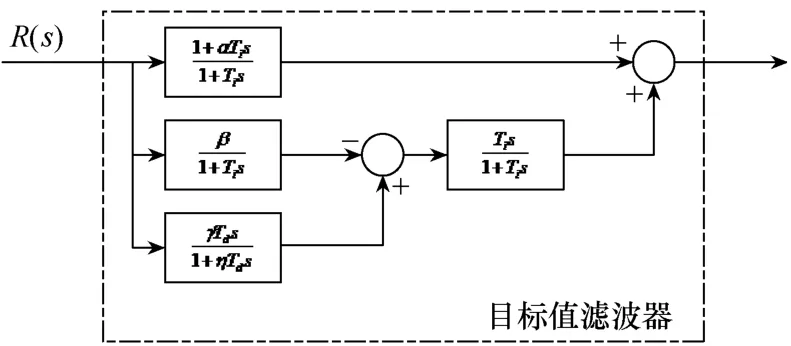
圖7 濾波型二自由度PID控制器結構
相比于其他的二自由度PID控制方式,目標值濾波型二自由度控制具有更易于實現的特點,只需在原有的單自由度PID控制器的基礎上加上一個目標值濾波器即可實現二自由度的PID控制。而其中各個量的意義如下:α:比例增益二自由度化系數;β:積分時間二自由度化系數; γ:微分時間二自由度化系數。
在實際的應用場合中,一般只需要按照文獻[4]的方法固定三個二自由度化參數即可實現二自由度控制器的設計。
4 系統仿真結果分析
本文仿真的對象是某型號直線電機,該型電機采用無鐵心結構,詳細參數見表2。
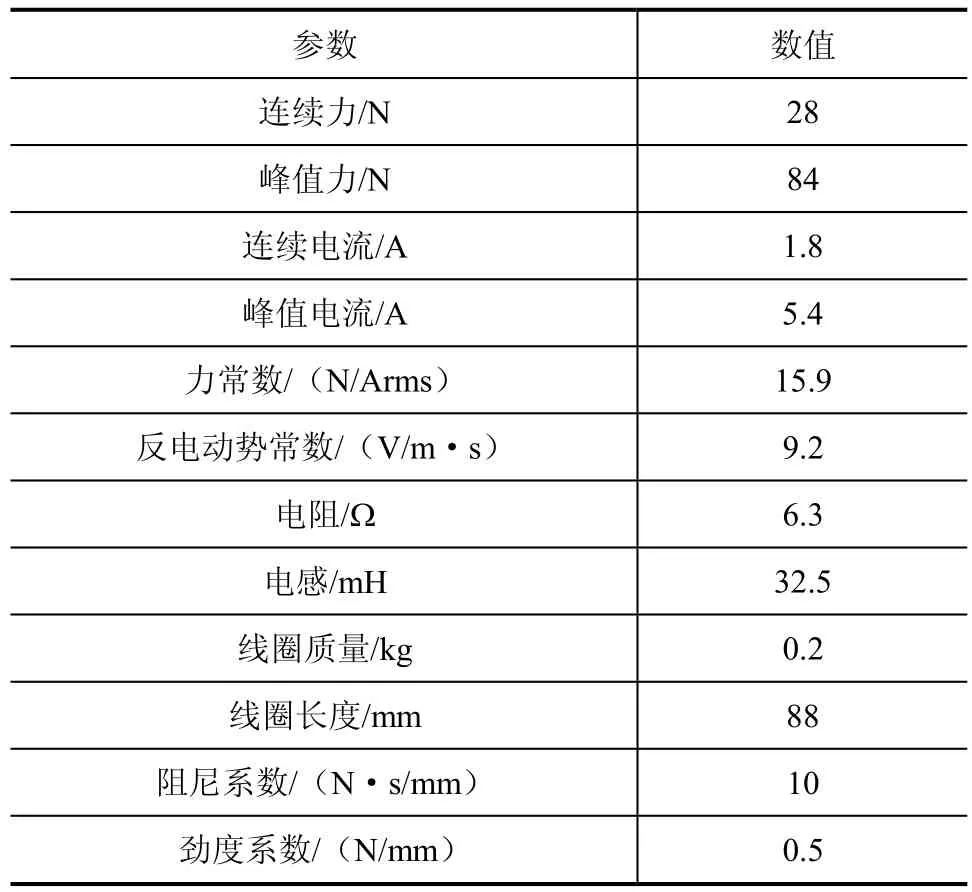
表2 無鐵心直線電機的參數
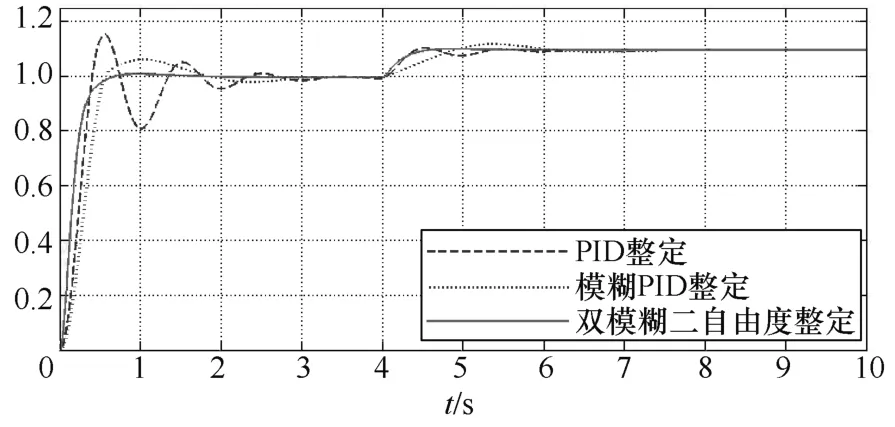
圖8 仿真結果比較
根據表2中的電機參數,在Matlab/Simulink中構建整個控制系統的模型進行仿真,本文對多種結構的控制器進行了仿真。包括無超調量的單自由度PID控制,采用模糊自整定PID控制,雙模糊PID控制和二自由度PID控制。其中,本文的自適應PID控制器中的雙模糊控制采用的切換點e0為0.5。在t=0s時施加速度信號為單位階躍信號,t=4s時速度信號上升為1.1,得到仿真結果。
觀察圖中可以發現,采用模糊規則控制之后的響應速度得到了較大的提升,PID控制的調整時間約為1.5s,而模糊整定和本文的自適應控制器調整時間都下降到了0.5s左右。但模糊自整定的超調量較大,約為9%,并1.5s以后的穩態誤差才達到了小于5%的水平;本文提出的二自由度雙模糊控制,超調量為0.5%,并在0.5s左右達到誤差小于1%的水平。而在t=4s施加速度變化信號后,二自由度的雙模糊控制響應速度較快且速度波動較小,0.5s達到了穩定狀態,效果優于PID控制和模糊自整定PID控制。
5 結論
本文提出了一種新型的自適應PID控制器。該控制器采用雙模糊和目標值濾波型二自由度PID控制的結合來實現控制性能的優化,通過對誤差和誤差變化率的在線監測來調整PID控制參數,實現PID參數的在線整定,得到更好的控制效果。仿真結果表明:該新型控制器相比PID控制器和其他自整定PID控制器,具有更為理想的響應特性,調整時間和穩態精度都得到了有效提高。
參考文獻
[1] 鄒敏. 基于DSP的直線電機模糊PID控制系統研究與實現[D]. 武漢: 武漢理工大學, 2010.
[2] 安秋順. 二自由度PID控制——第一講基本型二自由度PID控制[J]. 冶金自動化, 1992, 04(4): 41-46.
[3] 劉洋, 王欽若, 陳思哲. 永磁同步電機雙模糊自適應直接轉矩控制[J]. 微電機, 2015, 48(2): 37-43.
[4] 楊龍, 左健民, 汪木蘭, 等. 永磁直線同步電機的目標值濾波型二自由度PID控制[J]. 微電機, 2014, 47(10): 62-65.
[5] 李志軍, 劉成穎, 孟凡偉, 等. 基于ZPETC和DOB的直線電機控制器設計及實驗研究[J]. 中國電機工程學報, 2012, 32(24): 134-140.
程帆(1992-),男,碩士研究生,就讀于東南大學電氣工程專業,研究方向為電機控制理論。
Research of 2-DOF Bi-fuzzy Self-tuning PID Controller for Linear Motor
Cheng FanYu Haitao
(Southeast University, Nanjing210096)
Abstract Linear motor is generally used as the driving device in high precision situation, but the traditional PID control is difficult to meet the accuracy demand and the dynamic response of the motor. In this paper, based on the combination of fuzzy self-tuning PID control and two degree of freedom PID control, a new PID self-tuning controller with 2-DOF based on target value filtering is proposed. And Matlab/Simulink model has been built to simulate the controller. The simulation result shows that: comparing with traditional PID control and fuzzy self-tuning PID control ,by using this controller,both the dynamic performance and response speed has been advanced,and the maximum deviation is decreased as well,which verified the feasibility of the design.
Keywords:linear motor; bi-fuzzy; PID; 2-DOF
作者簡介