高超聲速飛行器遞階滑模控制研究
2016-03-16 10:35:37馬利民中國人民解放軍駐錦州地區軍事代表室121000
電子測試 2016年1期
馬利民(中國人民解放軍駐錦州地區軍事代表室,121000)
?
高超聲速飛行器遞階滑模控制研究
馬利民
(中國人民解放軍駐錦州地區軍事代表室,121000)
摘要:針對高超聲速飛行器軌跡高度和速度跟蹤控制問題,基于縱向動力學的輸入/輸出線性化模型,設計了遞階滑模控制器和非線性擾動觀測器,用于解決系統存在不確定性問題和執行機構帶有死區非線性問題,對于所設計的控制器和觀測器進行了穩定性分析,并且通過仿真驗證了本文提出的方法能夠提高系統的收斂速度和收斂精度并能克服執行機構死區的影響。關鍵詞:高超聲速飛行器;非線性;遞階滑模;擾動觀測器
高超聲速飛行器一般是指飛行馬赫數大于或等于5,以吸氣式推進系統為動力的飛行器,由于具有重要的軍事意義,它已成為世界航空航天領域極其重要的發展方向。文獻[2]基于高超聲速空氣動力學理論研究了高超聲速飛行器縱向動力學特性,為控制系統設計奠定了基礎。本文基于輸入/輸出線性化模型,針對高超聲速飛行器軌跡速度和高度跟蹤控制問題,具體為系統存在不確定性問題和執行機構帶有死區非線性問題,采用遞階滑模控制方法和非線性擾動觀測器來解決以上問題,大大提高了系統的收斂速度和收斂精度并能克服執行機構死區的影響,保證控制系統的快速性和魯棒性。
1 高超聲速飛行器建模
考慮高超聲速飛行器縱向運動,飛行器的控制輸入為發動機節流閥開度,升降舵偏角。選定飛行的狀態變量分別為:飛行速度,航跡角,迎角,俯仰角速度以及飛行高度。高聲速飛行器縱向動力學模型的非線性方程組可以按照其受力情況在速度坐標系上描述為:

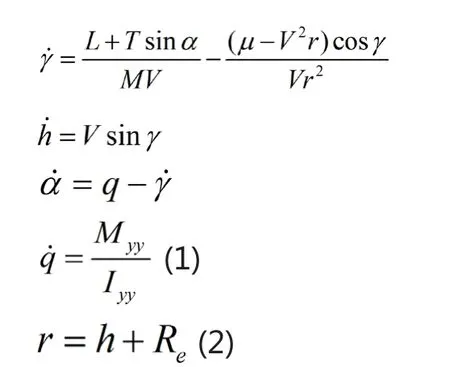
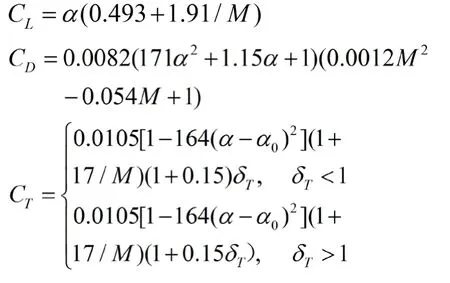

發動機動力學模型為如下二階系統:

2 縱向模型的輸入輸出線性化
對飛行速度和高度采用全狀態反饋進行輸入輸出精確線性化處理,即對飛行速度,飛行高度分別進行微分,直至控制輸入發動機節流閥或者升降舵偏角出現在微分式子中,要求最終的微分結果,控制輸入中節流閥或者升降舵偏角的因子至少有一個不為零。當對系統輸出飛行速度和飛行高度分別微分3次和4次時,能夠滿足以上要求,系統可被完全輸入輸出線性化為如下形式:

3 縱向模型的跟蹤控制
3.1遞階滑模控制器的設計
終端遞階滑模可以利用遞歸的滑模結構處理任意相對階次的系統,其基本思想是根據系統的相對階次設計多層滑模面,在最后一層滑模面設計控制器,確保系統軌跡進入該層滑模面后,其他滑模面以遞歸結構逐層收斂,直到實現控制目標,由于每一層滑模面運動特性完全已知,因此控制結構更加清晰,系統動態過程更加明了。
3.2非線性擾動觀測器的設計
對于系統在假設2成立條件下設計如下擾動觀測器:

4 結論
本文對高超聲速飛行器軌跡速度和高度跟蹤控制問題進行研究,首先將系統縱向非線性模型輸入輸出線性化處理,通過設計遞階滑模控制器和設計非線性擾動觀測器,來解決系統存在不確定性問題和執行機構帶有死區非線性問題,通過對綜合控制器的穩定性分析,得出速度和高度可分別在有限時間內跟蹤期望值,最后對比仿真結果驗證了本文設計的遞階滑模控制器和非線性擾動觀測器能夠使得系統在含有不確定項,有死區非線性的情況下,速度和高度能夠在有限時間內跟蹤期望值,并且具有跟蹤速度快,魯棒性強的優點。
參考文獻
[1]周濤,侯明善,王冬.高超聲速飛行器軌跡跟蹤的反步滑模控制[J].計算機測量與控制.2014,22(7):2063-2066.
[2]張棟,唐碩,李世珍.高超聲速飛行器一體化縱向氣動特性分析[J].飛行力學,2012,30(4):328-331.
[3]耿潔,劉向東,王亮.高超聲速飛行器的動態滑模飛行控制器設計[J].兵工學報,2012,33(3):307-312.
Research on Hypersonic Flight Vehicle Hierarchical Sliding Mode Control
Ma Limin
(Military Representative Office of the people's Liberation Army in Jinzhou,121000)
Abstract:For hypersonic vehicle trajectory tracking control altitude and speed, based on the input / output linear model of longitudinal dynamics designed hierarchical sliding mode controller and nonlinear disturbance observer,there is uncertainty for problem-solving system and execute dead bodies with nonlinear problems,for the design of the controller and the observer stability analysis,And the simulation results show that the proposed method can improve the convergence rate and convergence precision of the system and can overcome the influence of the dead zone.
Keywords:Hypersonic aircraft;Nonlinear;Hierarchical sliding mode;Disturbance observer