機載火炮對地攻擊訓練彈著點定位法及誤差分析
2016-03-16 04:27:16諸德放胡恩勇
裝甲兵工程學院學報 2016年5期
關鍵詞:方法
陳 朋, 諸德放, 胡恩勇
(1. 空軍勤務學院航空彈藥系, 江蘇 徐州 221000; 2. 空軍勤務學院訓練部, 江蘇 徐州 221000)
機載火炮對地攻擊訓練彈著點定位法及誤差分析
陳 朋1, 諸德放1, 胡恩勇2
(1. 空軍勤務學院航空彈藥系, 江蘇 徐州 221000; 2. 空軍勤務學院訓練部, 江蘇 徐州 221000)
針對當前機載火炮對地攻擊訓練彈著點探測范圍大、報靶精度要求高的現狀,基于脈沖式激光測距技術,提出了大范圍、高頻率的激光靶測距定位方法,通過構造空間模型解算彈著點位置。對于單個彈著點,采取對探測數據剔除特異值后取平均值的數據處理方法。對于連射條件下的彈著點,采取利用回歸擬合分析法求擬合點替代實測點的數據處理方法,并通過試驗數據進行了驗證,結果表明:該方法可以提高報靶精度、客觀反映飛行員打靶訓練水平。
大范圍激光靶; 彈著點探測; 連射; 回歸擬合
在各類武器射擊中,實際應用的報靶方法有光幕靶[1-3]、天幕靶[4-5]、光纖編碼定位靶[6]、聲坐標靶[7-8]以及基于圖像處理技術的坐標靶[9-10]等,每種方法都有一定的適用范圍。在機載火炮對地攻擊訓練的報靶中,由于受發射平臺機動性較大、靶場環境較復雜、彈丸散布范圍較大等因素的限制,采用光幕靶、光纖編碼定位靶的方法難以實現大范圍內的精確探測;采用天幕靶和基于圖像處理技術的坐標靶雖可實現大范圍探測,但報靶精度受光源、野外環境、價格等因素影響較大;采用聲坐標靶的方法對高頻射擊(連射)會發生漏測、重彈等現象,環境、彈形以及彈丸飛行姿態也在一定程度上影響著報靶精度。鑒于此,基于脈沖式激光測距技術[11],筆者提出一種大范圍、高頻率的激光測距定位方法,來實現機載火炮對地攻擊訓練彈著點的精確報靶。機載火炮發射方式有單射、齊射、連射等,在單射、齊射條件下,只須對單個彈著點進行解算定位;而在連射條件下,彈著點短時間內分布密集,對其進行精確報靶較困難。因此,筆者著重對連射條件下的彈著點進行探測定位和誤差分析。由于任何探測系統都存在誤差,針對該激光報靶方法可對彈著點進行多次測量的特點,采取對測距數據剔除特異值[12]后取平均值的方法處理單個彈著點;根據連射條件下彈著點的特性,采取回歸擬合分析法減小誤差,可實現精確、客觀地評定打靶訓練成績。
1 大范圍、高頻率探測激光靶
在進行機載火炮對地攻擊訓練時,靶場上事先設置醒目的靶環供飛行員瞄準射擊。針對彈著點分布范圍較大的特點,基于脈沖式激光測距技術對彈著點進行探測定位,激光探測器發射的激光經光學系統調整為厚度約0.05 m、發散角約90°的大范圍激光幕面,最遠探測距離可達40 m,其在靶場的布局如圖1所示。
離靶心一定距離布置性能一致的2組4個激光探測器,即T1、T2、T3、T4,以過地靶靶心Q的標準攻擊方向的航向y軸為基準,4個激光探測器的基準點關于y軸對稱,其中以T1、T2探測器的連線為x(或x′)軸。探測器T1、T2向空中發射的激光靶面1和2共面,激光重疊部分構成激光靶面12,其與地靶水平面夾角為θ,且與標準攻擊方向垂直。同理,探測器T3、T4構成的激光靶面34與激光靶面12平行,2組探測器沿y軸方向水平間隔距離為L1,其中系統取L1=5 m,θ=60°。
圖1 激光靶面在靶場的布局
建立地靶的三維空間坐標系o-xyz和激光靶面12的三維空間坐標系o′-x′y′z′(激光靶面34的坐標系o″-x″y″z″在圖中未標示),其中:x(或x′)軸與y軸的交點為圓點o(或o′),z軸根據右手法則確定朝上;y′軸在激光靶面12內,過圓點o且垂直于x(或x′)軸,z′軸根據右手法則確定朝上。
在進行機載火炮對地攻擊訓練時,載機總是沿標準攻擊方向對地進行射擊,攻擊方向與地靶水平面夾角α約為30°,而實際的攻擊方向有微小的偏差。航空炮彈采取連射的發射方式,航空火箭彈采取單射(齊射)的發射方式。根據靶場上激光靶面的布局,發射的彈丸依次穿過激光靶面12和34。本系統采用發射頻率為0.1 MHz的脈沖發射激光探測器,對最小尺寸為0.1 m、最大速度為1 km/s的彈丸可實現5次探測,從而避免發生漏測、重彈等現象。彈丸在穿過激光靶面12的過程中,激光探測器T1、T2分別對彈丸進行測距,通過相交定位原理確定彈丸在激光靶面12上的彈著點位置P′(x′,y′,0)(在坐標系o′-x′y′z′下的坐標)。同理,可確定彈丸在激光靶面34上的彈著點位置P″(x″,y″,0)(在坐標系o″-x″y″z″下的坐標)。根據彈丸末段彈道近似呈直線的原理,連接彈丸穿過這2個激光靶面上的彈著點P′和P″,將其延長至與地靶水平面相交,交點可近似當作彈丸在地靶水平面上的實際彈著點。
2 彈著點處理方法
2.1 彈著點解算空間模型的建立
激光報靶系統將彈著點置于建立的空間直角坐標系中進行解算,各個坐標系之間具有一定的變換關系。地面正交坐標系o-xyz與坐標系o′-x′y′z′之間的變換關系為
(1)
地面正交坐標系o-xyz與坐標系o″-x″y″z″之間的變換關系為

(2)

2.2 連射條件下彈著點的定位方法
根據連射條件下彈著點的特性,每次連續射擊的6發炮彈末段彈道應該可以看作在一個平面內。但由于發射航空炮彈時受載機和航炮抖動以及環境等隨機因素的影響,連射的多發彈丸末段彈道極有可能不在一個平面內,在靶面上的彈著點也可能不呈線性分布,而是存在一定的偏差。由于對飛行員的武器操控訓練水平考核注重的是瞄準和射擊時機的把握,因此,在進行機載火炮對地攻擊訓練時剔除上述隨機因素影響,假設連射的多發彈丸末段彈道在一個平面內,即假設在靶面上的彈著點呈線性分布,采用回歸擬合處理連射條件下的彈著點,相比于直接對單個彈著點進行坐標解算定位,其結果更能客觀反映飛行員的打靶水平。
對于一個攻擊波次連射的6發炮彈,通過處理得到實測點坐標P1i(x1i,y1i,z1i)和P2i(x2i,y2i,z2i) 根據線性假設,令
(3)
B=(b0,b1,b2)T,
(4)
ε=(ε1,ε2,…,ε12)T,
(5)
Z=(z11,…,z16,z21,…,z26)T,
(6)
則有
Z=XB+ε,
(7)
式中:X為回歸矩陣;B為回歸系數向量;ε為隨機誤差[15-16]。由最小二乘法可得
(8)
對于不同狀態、不同時機發射的彈丸,測得的n組數據是不同的,即rank(X)=3,因此XTX可逆,故可得

(9)
從而得出擬合平面Π的經驗回歸方程為

(10)
式(10)可近似作為彈丸攻擊平面Π的方程。

(11)
同理,對于激光靶面34內6發彈丸的實測點P2i,對應的擬合點為P2″i(x2″i,y2″i,z2″i),根據彈丸末段彈道直線方程
(12)
即可得出連射條件下經過回歸擬合處理后地靶水平面內實際彈著點坐標Pi(xi,yi,zi)。
3 連射條件下彈著點處理方法的驗證
根據表1、2中彈著點的原始數據,做出激光靶面12和34內6發彈丸彈著點的分布圖,分別如圖2、3所示。

表1 彈丸穿過激光靶面12的彈著點原始數據

表2 彈丸穿過激光靶面34的彈著點原始數據
圖2 激光靶面12內6發彈丸彈著點分布圖
圖3 激光靶面34內6發彈丸彈著點分布圖

表3 未經過回歸擬合處理的6發彈丸實際彈著點
表經過坐標變換后的彈著點坐標
表5 Pi″經過坐標變換后的彈著點坐標
根據式(3)-(10),可得

(13)
即回歸擬合平面Π的方程為

(14)
回歸擬合平面示意圖如圖4所示。可以看出:回歸擬合平面不是完全垂直于xoy平面,即彈丸攻擊平面不是完全垂直于地靶水平面,而是存在一定的傾斜夾角。經計算,這6發彈丸所在的攻擊平面與地靶水平面夾角約為89.64°,即存在0.36°的偏差,符合實際打靶條件下受各種不確定因素干擾的情況。

圖4 回歸擬合平面示意圖
根據式(11)可得回歸擬合后處理的擬合點坐標值,如表6、7所示。
表6 回歸擬合處理后的擬合點坐標P1i″
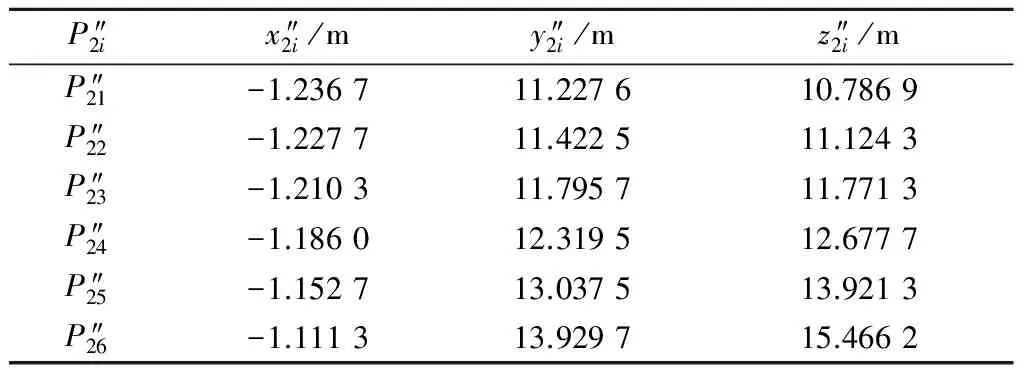
表7 回歸擬合處理后的擬合點坐標P2i″
根據式(12)可得6發彈丸在地靶水平面內的實際彈著點坐標Pi(xi,yi,zi),如表8所示。
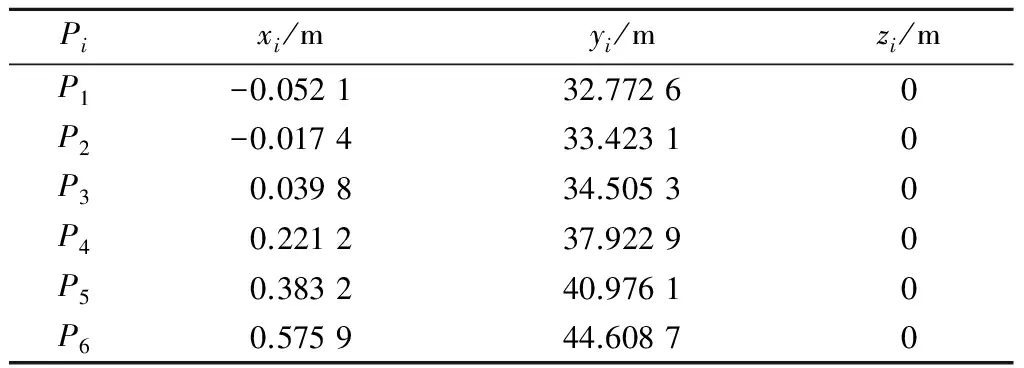
表8 回歸擬合處理后的6發彈丸實際彈著點
對回歸擬合前后6發彈丸在地靶水平面內的彈著點坐標Pi(Xi,Yi,Zi)和Pi(xi,yi,zi)進行比較,結果如圖5所示。
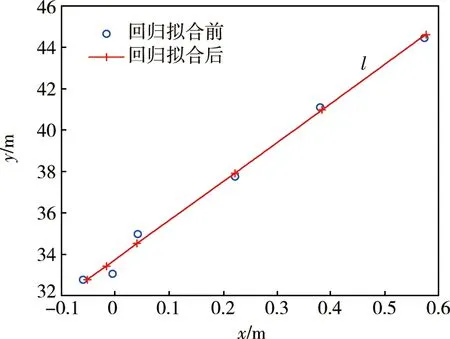
圖5 回歸擬合前后彈著點位置的比較
通過圖5可以發現:回歸擬合前后實際彈著點坐標發生了變化,回歸擬合后實際彈著點呈線性分布,設直線為l,回歸擬合前實際彈著點分布在直線l的兩側,尤其是第2、3發彈丸偏離直線l較大。由此可知:通過擬合回歸消除了偏差,即減弱了載機和航炮抖動以及環境等隨機因素對彈丸造成的影響,提高了報靶精度,客觀地反映了飛行員的實際打靶水平。
4 結論
對機載火炮對地攻擊訓練彈著點進行報靶,需要在復雜環境中、大范圍內對高速小彈丸進行精確探測,筆者基于脈沖式激光測距技術提出了大范圍、高頻率的激光靶測距定位方法,實現了對不同口徑、彈速、發射條件(單射、連射、齊射等)下彈丸的精確定位。對單個彈著點以及連射條件下彈著點采取不同的數據處理方法,經試驗數據驗證,回歸擬合分析法可以提高報靶精度、客觀反映飛行員打靶水平。
[1] 蔡榮立, 倪晉平, 田會.光幕靶技術研究進展[J]. 西安工業大學學報, 2013, 33(8): 603-609.
[2] 邱婉靜, 姜三平. 彈丸彈著點坐標測量系統研究[J]. 激光雜志, 2013, 34(2): 19-20.
[3] 倪晉平, 盧紅偉, 董濤. 彈著點坐標的組合光幕陣列測量方法[J]. 彈道學報, 2012, 24(1): 37-40.
[4] 李翰山, 雷志勇, 王澤民. 2種天幕靶光幕交匯立靶測量系統分析[J]. 彈道學報, 2010, 22(1): 29-36.
[5] 董濤, 倪晉平. 基于天幕靶的六光幕立靶測量原理[J]. 應用光學, 2011, 32(5): 913-916.
[6] 楊雷, 王鐵嶺, 安瑩. 主動式紅外光電靶的研究[J]. 現代電子技術, 2004, 27(4): 52-55.
[7] 國蓉, 何鎮安, 王偉. 被動聲探測技術與彈著點定位方法綜述[J]. 電聲基礎, 2010, 34(11): 48-52.
[8] 樊長虹, 于正亮, 徐宏坤.基于彈丸激波寬度的報靶系統: CN102435106A[P].2012-05-02.
[9] 洪佳敏, 曾培峰. 嵌入式自動報靶系統的設計與實現[J]. 計算機應用與軟件, 2015, 32(1):234-238.
[10] 楊平, 劉洪. 無線智能報靶系統設計與實現[J]. 信息技術, 2012(2):38-40.
[11] 紀榮偉, 趙長明, 任學成.高精度高重頻脈沖激光測距系統[J]. 紅外與激光工程, 2011, 40(8):1461-1464.
[12] 林麗芬, 肖化, 吳先球. 肖維勒準則和格拉布斯準則的比較[J]. 大學物理實驗, 2012, 25(6):86-88.
[13] 張璇, 程敏熙, 肖鳳平. 利用Origin對數據異常值的剔除方法進行比較[J]. 實驗科學與技術, 2012, 10(1):74-77.
[14] 劉建, 劉文金. 應用格羅布斯準則判定測量結果中的粗大誤差[J]. 設計與研究, 2006(2): 20-21.
[15] 施雨. 應用數理統計[M]. 西安: 西安交通大學出版社, 2005: 188-197.
[16] 馮力. 回歸分析方法原理及SPSS實際操作[M]. 北京: 中國金融出版社,2004: 156-160.
(責任編輯:尚彩娟)
Positioning Method and Error Analysis of Impact Point for Air-to-ground Attack Training of Airborne
CHEN Peng1, ZHU De-fang1, HU En-yong2
(1. Department of Aerial Ammunition, Air Force Logistic College, Xuzhou 221000, China; 2. Department of Training, Air Force Logistic College, Xuzhou 221000, China)
A large-range and high-frequency laser target ranging and positioning method based on pulsed laser ranging technique is proposed for a large-range detection and high-accuracy scoring of impact point of air-to-ground attack training projectile launched from airborne gun. A spatial model is established to calculate the impact point position. The paper proposes two data processing methods: one eliminates the specific values and averages for the single impact point detection data; the other replaces the measured points with regression fitting points to calculate impact points in continuous fire. The latter method is verified by experiment and confirmed that it can improve scoring precision and reflect pilot shooting training level objectively.
large-range laser target; impact point detection; continuous fire; regression fitting
1672-1497(2016)05-0054-06
2016-07-04
陳 朋(1991-),男,碩士研究生。
TJ06
A
10.3969/j.issn.1672-1497.2016.05.011
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56