電動舵系統顫振影響因素分析
2016-03-16 09:25:59熊官送李邦清曹東海
導航定位與授時 2016年6期
宋 濤,熊官送,李邦清,曹東海
(北京自動化控制設備研究所,北京 100074)
電動舵系統顫振影響因素分析
宋 濤,熊官送,李邦清,曹東海
(北京自動化控制設備研究所,北京 100074)
針對電動舵系統顫振問題,將舵系統簡化為雙慣量模型,并在該模型的基礎上分析了舵系統顫振的原因。通過對舵系統傳遞函數以及單自由度碰撞振動系統力學模型的分析,得出傳動機構剛度、間隙等非線性因素以及負載慣量對舵系統穩定性的影響,并分析了各因素造成舵系統顫振的原因。通過數學仿真,驗證了所得結論的正確性,并針對顫振抑制提出了相應的改進措施。
電動舵系統;顫振;剛度;負載慣量;間隙
0 引言
舵系統是典型的位置伺服系統,一般由控制器、功率驅動電路、電機、傳動機構和反饋電位計等部分組成。而傳動機構均會存在一定的間隙和彈性,由多個型號的研制過程可知,傳動機構剛度不足、間隙控制不嚴及負載慣量過大,易導致舵系統發生顫振。顫振是一種自激振動,是由系統內部激發產生的周期性振動[1]。舵系統發生顫振會影響位置控制精度,降低響應的快速性,嚴重的顫振會破壞系統結構,甚至導致整個舵系統工作失效[2-3]。
針對舵系統顫振問題,國內外許多學者都做出了大量研究。文獻[4]通過建立間隙非線性振動模型和極限環模型,利用描述函數法以及攝動法對非線性顫振的規律進行分析和求解,得出了電動舵系統顫振的影響因素,比較準確地解釋了電動舵系統中傳動機構間隙會引起顫振和較大慣量負載使顫振加劇這一問題。該文僅對間隙引起的非線性動力學特性進行了詳細地分析,而對于剛度及負載慣量等影響因素引起顫振的原因未做分析,僅給出了相應規律和結論。文獻[5]針對在仿真過程中某型號導彈出現的顫振現象,首先利用描述函數法分析了系統顫振的原因,然后利用超前校正法抑制了顫振現象。該文僅從間隙一個角度分析,未對其他顫振影響因素進行分析。本文針對舵系統顫振的各個影響因素,進行了全面分析,首先建立了舵系統雙慣量模型,利用系統傳遞函數以及對單自由度碰撞振動系統力學模型的理論分析,得出傳動機構剛度、負載慣量以及間隙對系統振蕩的影響及原因,并通過仿真驗證了結論的正確性,最后給出了相應的改進措施。
1 舵系統模型建立
為達到建模目的,須將舵機內部分解為雙慣量環節,即電機環節、負載環節,傳動機構轉動慣量等效到負載環節上。在舵機系統中不能將電機與負載看成一體,否則就是一個簡單的剛體運動。間隙、剛度和負載慣量是影響舵系統性能、引起舵面顫振的重要因素,對于實際系統,傳動機構間隙不可能完全消除;即便電機與負載是直接耦合的,但傳動機構是彈性的,在電機輸出力矩的驅動下,傳動機構會產生一定程度的彈性變形。因此,非線性環節不能忽略。
雙慣量環節模型結構框圖如圖1所示。其中,KL是傳動軸的剛度,i為減速比;當傳動軸發生扭轉形變時會產生扭矩,稱之為軸矩,用Tw表示;Jm、Bm、Tm、θm分別為電機的轉動慣量、阻尼系數、電磁轉矩和旋轉角度;JL、BL、θL分別為負載慣量(包含傳動機構),傳動機構阻尼系數和負載旋轉角度;TL為負載擾動。

圖1 雙慣量模型的結構框圖Fig.1 The model of two-mass transmission system
2 剛度及負載慣量對系統的影響分析
2.1 回路分析
假定舵系統傳動機構沒有間隙,剛度足夠強,電機軸、舵機輸出軸均靜止。此時輸入一激勵信號,電機軸開始偏轉,而舵機輸出軸仍靜止,故指令信號與反饋信號出現偏差。舵系統將偏差信號放大以控制電機,電機產生的扭矩經傳動減速機構驅動舵機輸出軸向偏差角減少的方向偏轉。當帶動負載(舵面)的舵機輸出軸到達指令位置時,由于負載慣量的影響,并不會立刻停下來,而是越過給定值。一旦越過給定值,偏差角信號極性馬上改變,因而電機的控制電壓極性也發生改變,電機產生的扭矩經傳動減速機構驅動舵機輸出軸向偏差角減少的方向偏轉。在系統阻尼設計恰當時,帶動負載的輸出軸在指令信號給定值附近左右擺動幾次后停止,雖有短暫的調整過程,但不會產生持續振蕩。
而實際系統中傳動機構剛度有限,均會存在一定的彈性,這樣就會使得系統本身存在一定的諧振頻率。當信號頻率與系統固有的諧振頻率相近時,系統會發生顫振;當信號頻率與系統固有的諧振頻率相同時,系統會發生諧振。電機輸出力矩與電機軸角度、電機輸出力矩與輸出軸角度之間的傳遞函數分別如式(1)、式(2)所示。
(1)
(2)
這里黏滯阻尼系數Bm、BL很小,為方便分析可認為Bm=BL=0。則電機輸出力矩與電機軸角度、電機輸出力矩與輸出軸角度之間的傳遞函數化簡為:
(3)
(4)
傳遞函數的左邊項,可以看作一個二階純慣性環節,是由系統非柔性環節產生。右邊項是一個二階振蕩環節,是由系統非柔性環節和柔性環節共同產生的作用。這個柔性系統中存在4個極點,2個位于原點位置,還有1對是復共軛極點。這對復共軛極點的存在使得系統在特點頻率下的響應會比較劇烈,從而產生振蕩現象。根據式(3)、式(4),可得電機諧振頻率為
(5)
電機反諧振頻率為
(6)
舵面諧振頻率為
(7)
由于:i2Jm?JL
(8)

(9)
因此影響系統諧振頻率的因素(暫不考慮間隙)主要為傳動機構剛度KL和負載慣量JL。傳動機構剛度減小或負載慣量增加會降低系統諧振頻率。
單純的PID控制之所以不能抑制系統振蕩,是因為雙慣量系統是四階系統,而PID控制器最多只有3個可調參數,因此不能自由地配置系統零極點。盡管可以通過增大系統微分參數,等效減小電機轉動慣量,降低系統的“慣量比”以增大諧振頻率[6],但是微分會放大系統噪聲,所以效果有限。要提高系統諧振頻率, 必須使傳動機構具有較高的剛度。
2.2 數學仿真
根據式(7)可知,系統諧振頻率隨傳動機構剛度的增加而提高。利用MATLAB/SIMULINK對系統進行仿真,固定其他參數(負載慣量為0.044kg·m2,間隙為0),僅改變傳動機構剛度,傳動機構剛度分別為400、500、800、1000、1600、2000,單位為(N·m)/(°)。得到系統開環幅頻特性如圖2所示。

圖2 系統開環頻率特性與剛度關系曲線Fig.2 Open loop frequency response at different stiffnesses
根據式(7)可知,系統諧振頻率隨負載慣量的增加而降低。固定其他參數(間隙為0,剛度為500(N·m)/(°)),僅改變負載慣量,負載慣量分別為0.044、0.020、0.010、0.005、0.001、0,單位為kg·m2。得到系統開環幅頻特性如圖3所示。

圖3 系統開環頻率特性與負載慣量關系曲線Fig.3 Open loop frequency response at different load inertia
通過仿真可知,隨著負載慣量的增大,系統諧振頻率會減小,諧振峰值會增大。因此,負載慣量越大,系統越容易發生諧振。
3 間隙對系統的影響分析
3.1 回路分析
間隙普遍存在于機械產品中,間隙的存在可能引發控制系統極限環振蕩,從而引起舵面顫振[7]。舵系統傳動機構中的間隙可集中到一處考慮。將傳動機構間隙、剛度一起考慮,傳動機構的軸矩與間隙耦合,表現為死區特性,如圖4所示。

圖4 傳動機構軸矩與間隙、剛度及轉角的關系Fig.4 The relationship between shaft torque, stiffness and degree
由于間隙均位于系統回路內部,其運動過程非常復雜。下面采用單自由度碰撞振動系統的力學模型進行近似分析[8-9],運動模型如圖5所示。其中m代表舵面,KL代表傳動機構剛度,c代表阻尼系數,e代表間隙,F代表外界干擾力矩。此處以單自由度碰撞振動系統的力學模型探究間隙引起的舵系統非線性振動規律。
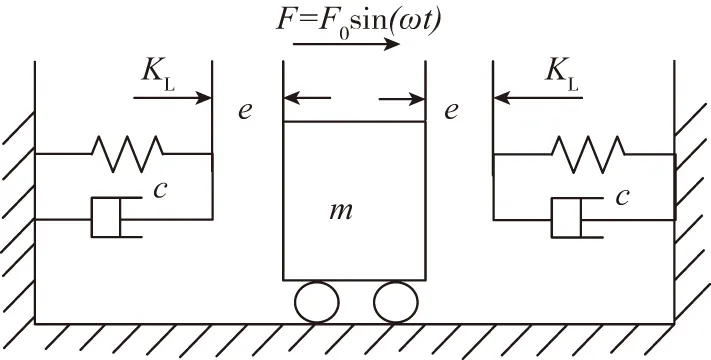
圖5 單自由度碰撞振動系統的力學模型Fig.5 The mechanical model of a one-degree-of-freedom vibroimpact system
彈簧恢復力為:
(10)
系統振動微分方程為
(11)
若e=0,則系統固有頻率為
(12)
若e≠0,設系統固有頻率為ωe,發生諧振時振幅為a,則m的位移可近似為
x=asin(ωet+φ)
(13)
忽略阻尼,可解得系統的等效固有頻率為
(14)
式(14)中含3個變量-ωe、e、a,無法確定兩變量之間的關系,下面通過分析e/a與ωe/ω0的關系(如圖6)及e與a的關系,來定性分析ωe、e、a兩兩之間的關系。

圖6 間隙、諧振幅度與諧振頻率的關系Fig.6 The relationship between backlash, amplitude and frequency
根據對系統的仿真以及實際系統的測試,ωe隨間隙e的增大而減小,但其值變化范圍很小,此處為方便分析e與a的關系,認為ωe為常數bω0(其中b為略小于1的常數)。可得
(15)
所以:a=Ce(C為常數)
(16)
由圖6可知,當ωe與ω0之比為常數時,e與a之比也為常數,得出與式(16)相同的結論。
以上計算多次采取了近似,與實際系統存在一定的差異。比如在實際系統中,當e等于0時,a有時并不等于0,而是等于一個很小的值;在電機死區及摩擦阻尼適當時,若e不是很大,a可能為0。但e與a的強正相關關系是存在的。
由以上分析可知間隙越大,系統諧振幅度越大,系統也越容易發生諧振。諧振幅度的增大對系統的破壞會更嚴重。實踐證明,控制傳動機構間隙是保證系統穩定,提高系統性能必不可少的條件。
也可以將系統傳動機構的間隙理解為此處剛度為零,即傳動機構剛度為一個分段函數,在前部分剛度為零,在后部分剛度為正常值。間隙的存在大大降低了傳動機構剛度,減小了系統諧振頻率,使系統更容易發生振蕩。但間隙對系統的影響是一個十分復雜的過程,其作用不單單是降低諧振頻率,其引發諧振的機理也不能僅從諧振頻率的角度進行分析,還需要做更加深入的研究。
3.2 數學仿真
對系統進行仿真,固定其他參數(剛度為500(N·m)/(°),負載慣量為0.044 kg·m2),僅改變間隙大小(間隙為2e),間隙分別為0、0.05、0.1、0.2,單位為(°),得到階躍響應與舵機間隙之間關系如圖7所示。

圖7 階躍響應與間隙之間關系Fig.7 Step response at different backlash
通過仿真可知:間隙越大,系統諧振頻率越小,但變化不明顯。間隙越大,系統諧振峰值越大,越容易發生諧振,即間隙越大越容易使系統進入非線性共振區。
4 改進措施
由于生產工藝的局限和實際需求,傳動機構剛度不可能無限大,負載的慣量和間隙也不可能很小。因此,單純的增大剛度,減小負載慣量和間隙對諧振的抑制有限,需尋求其他抑制方法。
從頻域角度分析,系統發生振蕩的根本原因是在特定頻率處其幅頻特性有較大的增益[10],而陷波濾波器能大大降低系統在某一頻率處的幅值,并且基本不影響其他頻率處的特性。所以只要事先精確地測得系統諧振頻率,然后使用陷波濾波器抑制諧振。而在實際系統中,由于間隙等因素的影響,諧振頻率可能會發生變化,所以可采用自適應辨識與陷波濾波器相結合,隨時辨識系統諧振頻率以更改陷波濾波器的參數。但這種方法計算量大,實際系統中應用較少,而多采用低通濾波的方式。
本文通過設計低通濾波器,在MATLAB/ SIMULINK下對系統進行仿真,驗證低通濾波方法的有效性。模型參數設置為:JL=0.044kg·m2,KL=500N/(°),2e=0.15°。采樣解算出的位置反饋信號,經過一階45Hz低通濾波器濾波,濾波后參與回路控制解算。用巴特沃斯濾波器實現45Hz低通濾波。濾波前后仿真結果如圖8所示。

圖8 濾波前后仿真結果Fig.8 Different simulation results of the application of the filter
為了驗證低通濾波器抑制舵系統顫振的理論分析及數學仿真,在某電動舵系統中,分別對無采用低通濾波器的舵系統進行測試。按控制周期Ts=0.5ms離散化后的濾波器傳函為
y(k)= 0.0661x(k)+0.0661x(k-1)+
0.8678y(k-1)
(17)
其中,x為濾波前數據,y為濾波后數據;(k)為當前周期值,(k-i)為前i個周期值。以單位階躍信號對舵系統進行測試,測試結果如圖9、圖10所示。

圖9 未采用濾波器時舵系統的單位階躍響應Fig.9 Step response before using the filter
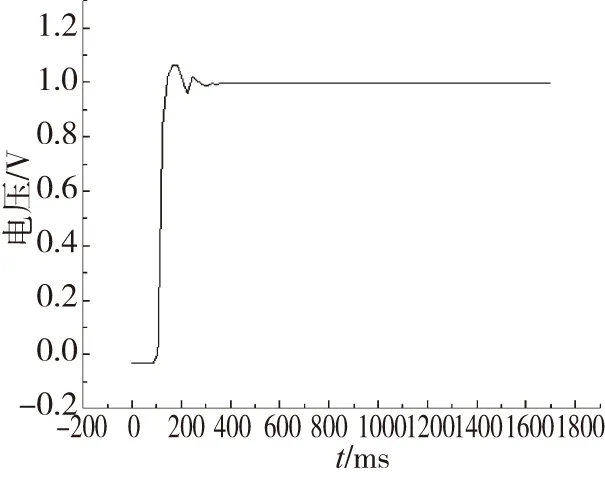
圖10 采用濾波器后舵系統的單位階躍響應Fig.10 Step response after using the filter
通過單位階躍響應曲線可以看出,在未采用濾波器時,舵系統發生振幅約為0.15V、頻率約為50Hz的顫振。在采用濾波器后,系統響應雖有一定的超調和半波振蕩,但最終趨于穩定。對于抑制舵系統顫振,低通濾波法是一種簡單可行的方法,其通過濾掉引發系統顫振的頻率信號來抑制系統顫振,仿真和試驗結果表明,低通濾波法具有一定的工程應用價值。
5 結論
本文通過對舵系統雙慣量模型的建立,利用系統傳遞函數以及對單自由度碰撞振動系統力學模型的理論分析,得出傳動機構剛度、間隙以及負載慣量對系統振蕩的影響及原因:從頻域角度分析,系統發生振蕩的根本原因是在特定頻率處其幅頻特性有較大的增益。傳動機構剛度越小、負載轉動慣量越大、間隙越大,則系統諧振頻率會越低,系統也就越容易發生振蕩,仿真結果證實了理論分析的正確性。采用低通濾波器能有效抑制舵系統顫振,仿真和試驗結果驗證了其有效性。
[1] 許行之,高亞奎,章衛國. 考慮舵機動力學的舵回路系統顫振特性分析[J].計算機仿真,2014,31(10):80-85.
[2] 陳鵬展,唐小琦,金宏星. 伺服系統速度環控制參數自整定方法研究[J].儀表技術與傳感器,2010(2):78-81.
[3] 趙忠勝. 淺談數控系統振蕩的排除方法[J].機床電器,2006,33(1):25-26.
[4] 張新華,謝勁松,李邦清. 電動伺服機構振蕩問題研究[J].航天控制,2010,28(3):83-88.
[5] 李友年,陳星陽. 舵機間隙環節對控制系統的影響分析[J].航空兵器,2012(1):25-28.
[6] 胡華. 柔性伺服系統振蕩抑制算法研究[D].哈爾濱:哈爾濱工業大學,2011.
[7] 張明月. 滾珠絲杠式電動舵機非線性分析及控制策略研究[D].中國科學院研究生院(長春光學精密機械與物理研究所),2014.
[8] Xu J. The analysis of grazing periodic motions in a single degree of freedom vibro-impact system with double constrains[J].Pure Mathematics , 2015, 5(4):121-128.
[9] 朱喜鋒,羅冠煒. 兩自由度含間隙彈性碰撞系統的顫碰運動分析[J].振動與沖擊,2015,34(15):195-200.
[10] Odai M,Hori Y. Speed control of 2-inertia system with gear backlash using gear torque compensator[C].IEEE AMC Coimbra,1998:234-239.
Study on Impact Factors of Chattering in Electromechanical Actuator
SONG Tao, XIONG Guan-song, LI Bang-qing, CAO Dong-hai
(Beijing Institute of Automatic Control Equipment,Beijing 100074,China)
To avoid chattering in electromechanical actuation system, the system model is simplified as a two-mass transmission one, and the causes for chattering are analyzed on the basis of the model. By analyzing the transfer function of the actuator system and the model of a one-degree-of-freedom vibroimpact system, the way the load inertia and the nonlinear factors like servo drive stiffness and backlash impact on the performance of the system is discussed. The results of simulation show that the theory could explain the causes of the chattering in electromechanical actuator. Measures are put forward for the suppression of the chattering.
Electromechanical actuator;Chattering;Stiffness;Load inertia;Backlash
10.19306/j.cnki.2095-8110.2016.06.009
2015-05-26;
2015-06-28。
宋濤(1990 - ),男,碩士,主要從事伺服系統控制方面的研究。E-mail:18510970869@163.com
TP273
A
2095-8110(2016)06-0045-05
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
