一種基于實時物理閉環(huán)校正的空中動基座對準(zhǔn)方法
2016-03-16 06:08:32何長久高偉熙唐子偉王忠輝
導(dǎo)航定位與授時 2016年1期
何長久,許 靜,高偉熙,唐子偉,王忠輝
(北京自動化控制設(shè)備研究所,北京100074)
一種基于實時物理閉環(huán)校正的空中動基座對準(zhǔn)方法
何長久,許 靜,高偉熙,唐子偉,王忠輝
(北京自動化控制設(shè)備研究所,北京100074)
提出了一種基于實時物理閉環(huán)校正的平臺慣導(dǎo)空中動基座對準(zhǔn)方法。該方法利用卡爾曼濾波實現(xiàn)慣導(dǎo)誤差的實時估計,根據(jù)最優(yōu)二次型準(zhǔn)則設(shè)計反饋控制進(jìn)行慣導(dǎo)平臺的實時閉環(huán)物理校正,有效保證了對準(zhǔn)精度。經(jīng)機(jī)載試驗,平臺慣導(dǎo)空中動基座對準(zhǔn)后,導(dǎo)航精度大幅提高。
高精度平臺慣導(dǎo);動基座對準(zhǔn);實時;物理閉環(huán)校正
0 引言
平臺慣導(dǎo)動基座對準(zhǔn)技術(shù)是非常重要的關(guān)鍵技術(shù),主要解決在帶飛狀態(tài)下平臺慣導(dǎo)空中啟動及初始對準(zhǔn)的技術(shù)問題。其動基座對準(zhǔn)方案采用傳遞對準(zhǔn)方式,基準(zhǔn)信息為處于連續(xù)衛(wèi)星修正狀態(tài)的母慣導(dǎo)信息。依此為背景,設(shè)計一種基于實時物理閉環(huán)校正的空中動基座對準(zhǔn)方法,實現(xiàn)了平臺慣導(dǎo)系統(tǒng)在動基座條件下的高精度對準(zhǔn)。
1 動基座對準(zhǔn)方案
子慣導(dǎo)采用游移自由方位編排解算的高精度平臺慣導(dǎo)系統(tǒng),動基座對準(zhǔn)基準(zhǔn)信息為處于衛(wèi)星連續(xù)修正狀態(tài)下的母慣導(dǎo)信息。
兼顧對準(zhǔn)時間和對準(zhǔn)精度兩方面考慮,采用“速度+位置”的匹配對準(zhǔn)方式。
對于平臺慣導(dǎo),在動基座對準(zhǔn)過程中需完成速度和位置誤差修正、失調(diào)角誤差估計、物理平臺調(diào)整、陀螺漂移估計補(bǔ)償。為此,設(shè)計了卡爾曼濾波器,在動基座對準(zhǔn)過程中實時進(jìn)行子慣導(dǎo)狀態(tài)誤差準(zhǔn)確估計的同時,依據(jù)最優(yōu)二次型準(zhǔn)則確定的閉環(huán)控制反饋系數(shù),實現(xiàn)物理平臺的實時閉環(huán)校準(zhǔn)。
1.1 干擾補(bǔ)償方案
在慣導(dǎo)系統(tǒng)傳遞對準(zhǔn)設(shè)計過程中,桿臂效應(yīng)影響對準(zhǔn)精度,設(shè)計考慮桿臂效應(yīng)、撓曲振動等干擾因素的補(bǔ)償和處理。
母、子慣導(dǎo)位置示意圖如圖1所示。母、子慣導(dǎo)相對慣性空間的距離矢量分別為rm和rs,母、子慣導(dǎo)之間的矢量距離為lms,當(dāng)角速度為ω時,母慣導(dǎo)速度為
vmL=ω×rm
(1)

圖1 母子慣導(dǎo)位置示意圖Fig.1 The position diagram of themaster INS and the slave INS
子慣導(dǎo)速度為
vsL=ω×rs
(2)
母、子慣導(dǎo)之間的桿臂效應(yīng)速度為
v桿臂=ω×rs-ω×rm=ω×lms
(3)
lms可以通過量測母子慣導(dǎo)之間的距離獲得,ω可以通過平臺姿態(tài)角獲得,根據(jù)式(3),可以計算桿臂效應(yīng)帶來的速度v桿臂。桿臂效應(yīng)在卡爾曼濾波器的速度量測值中進(jìn)行實時補(bǔ)償
Zk=vs-vm-v桿臂
(4)
1.2 卡爾曼濾波器
動基座對準(zhǔn)過程中,用于子慣導(dǎo)誤差參數(shù)估計的濾波器為經(jīng)典卡爾曼濾波器,濾波器工作在實時閉環(huán)狀態(tài),其包含濾波周期、離散周期以及反饋修正周期的設(shè)定。子慣導(dǎo)誤差模型為:
(5)
(6)
離散卡爾曼濾波算法如下:
(7)
(8)
(9)
(10)
Pk=(I-KkHk)Pk/k-1
(11)
為了兼顧對準(zhǔn)時間和對準(zhǔn)精度,在動基座對準(zhǔn)方案中,共設(shè)計了兩個卡爾曼濾波器,分別為5維和8維,5維濾波器實現(xiàn)對水平軸平臺姿態(tài)角誤差的粗估和修正;8維濾波器估計過程中,要求載體機(jī)動,以實現(xiàn)對方位姿態(tài)角誤差的估計,并在此基礎(chǔ)上,實現(xiàn)對水平姿態(tài)角誤差的精確估計和修正、水平軸陀螺漂移的精確估計。
1.3 方位對準(zhǔn)方案
平臺慣導(dǎo)方位對準(zhǔn)采用基于速度指向分解誤差原理,采用機(jī)動方案,實現(xiàn)方位誤差角的準(zhǔn)確估計。
機(jī)動對準(zhǔn)方案,需要載體進(jìn)行一定時間(3~5min)的機(jī)動,影響方位精度的因素有:加速度計刻度系數(shù)誤差、基準(zhǔn)速度誤差(主要為運動相關(guān)變化部分)、補(bǔ)償后殘存的桿臂效應(yīng)誤差。其對準(zhǔn)精度的估算公式可用式(12)表示:
(12)
子慣導(dǎo)加速度計刻度系數(shù)誤差量級為1×10-4(1σ)、基準(zhǔn)速度誤差運動變化量(載機(jī)機(jī)動按90°轉(zhuǎn)彎)和桿臂誤差補(bǔ)償殘余按0.2m/s(1σ)考慮,其尋北精度量級為:3′(1σ)。
通過仿真分析和比較,確定采用機(jī)動對準(zhǔn)方案。方位對準(zhǔn)精度與載機(jī)機(jī)動動作的大小、持續(xù)時間直接相關(guān)。機(jī)動形式有三種:S形機(jī)動、盤旋和轉(zhuǎn)彎,通過仿真確定的三種機(jī)動形式要求為:
1)S形機(jī)動:機(jī)動最大加速度約為0.3~0.5g,機(jī)動周期不少于5min;
2)盤旋機(jī)動或轉(zhuǎn)彎:載機(jī)盤旋一圈或進(jìn)行一個90°轉(zhuǎn)彎。
機(jī)動結(jié)束后,轉(zhuǎn)入直線飛行,慣導(dǎo)完成精調(diào)平、水平陀螺漂移估計和導(dǎo)航參數(shù)初始化。
1.4 方位控制方案

方位軸直接工作在游移方位方式下,方位軸控制施矩公式為
(13)

2 慣導(dǎo)誤差校正
2.1 閉環(huán)反饋校正原則
卡爾曼濾波器進(jìn)行慣導(dǎo)誤差建模設(shè)計時,一般假定各項誤差為小量,忽略了高次項誤差的影響,誤差模型傳播近似為線性。采用開環(huán)校正方案時,由于物理平臺處于非水平狀態(tài),對準(zhǔn)階段慣導(dǎo)誤差增長較快,直接影響到慣導(dǎo)誤差的估計精度;相對于開環(huán)校正,閉環(huán)反饋校正實時對慣導(dǎo)誤差進(jìn)行校正,慣導(dǎo)誤差始終控制為小量,濾波器中慣導(dǎo)誤差模型更為準(zhǔn)確,誤差估計精度也更高。
實時閉環(huán)反饋校正時,特別是濾波器工作初期,各誤差參數(shù)估計均沒有收斂,反饋校正不當(dāng)將導(dǎo)致濾波器和物理平臺處于震蕩狀態(tài)甚至失效,必須依據(jù)一定的準(zhǔn)則,選擇合理的校正系數(shù)。
本方法利用線性二次型最優(yōu)控制準(zhǔn)則,分析確定慣導(dǎo)誤差實時物理閉環(huán)反饋校正系數(shù)。線性二次型最優(yōu)控制原理如下。
設(shè)線性定常系統(tǒng)的狀態(tài)方程為

(14)
二次型性能指標(biāo)為
(15)
式中,Q為正定(或半正定)實對稱陣,R為正定實對稱陣,xT(t)Qx(t)表示狀態(tài)變量與平衡位置的偏差,uT(t)Ru(t)與控制功率成正比。
反饋控制過程中,使J最小,就是使系統(tǒng)的偏差最小,并使控制過程的消耗能量最小。可以證明,當(dāng)系統(tǒng)的狀態(tài)是完全可控時,使J最小的控制是狀態(tài)X(t)的線性函數(shù),即
u(t)=-Kx(t)
(16)
其中,
K=R-1BTP
(17)
P為常數(shù)對稱陣定矩陣,且滿足黎卡提代數(shù)方程
PA+ATP-PBR-1BTP+Q=0
(18)
由分離性定理可知,反饋修正環(huán)節(jié)可以單獨設(shè)計。狀態(tài)矩陣A取決與慣導(dǎo)誤差模型,根據(jù)實際修正周期、濾波周期,綜合考慮校正后的超調(diào)量和超調(diào)時間,按照二次型最優(yōu)準(zhǔn)則,確定反饋修正系數(shù)向量K。
2.2 慣導(dǎo)誤差校正方案
根據(jù)不同誤差項特性,選擇不同的校正方案,具體如下:
(1)位置、速度誤差校正
根據(jù)濾波器對子慣導(dǎo)位置誤差、速度誤差的估計,以50ms為周期,按照設(shè)定的反饋系數(shù),實時在子慣導(dǎo)導(dǎo)航解算中扣除這兩項誤差。
(2)水平軸平臺失調(diào)角校正
根據(jù)濾波器對子慣導(dǎo)水平軸平臺失調(diào)角的估計,量綱轉(zhuǎn)換后,以20ms為周期,按照設(shè)定的反饋系數(shù),在平臺施矩解算中扣除。
(3)水平軸陀螺漂移校正
陀螺漂移的估計時間較長,而且該值的估計精度受方位失調(diào)角影響較大,動基座對準(zhǔn)過程中,不對水平軸陀螺漂移進(jìn)行校正。動基座對準(zhǔn)結(jié)束,以最后估計的水平軸陀螺漂移值為準(zhǔn),量綱轉(zhuǎn)換后,在轉(zhuǎn)導(dǎo)航后的導(dǎo)航施矩解算時,實時補(bǔ)償陀螺漂移等效值。
(4)方位失調(diào)角校正
方位失調(diào)角估計是動基座對準(zhǔn)的關(guān)鍵,該值的估計直接影響到水平軸失調(diào)角和水平軸陀螺漂移的估計精度。載機(jī)機(jī)動后方位失調(diào)角穩(wěn)定收斂,但對準(zhǔn)過程中,不對該值進(jìn)行補(bǔ)償。導(dǎo)航編排采用游移自由方位,動基座對準(zhǔn)結(jié)束,轉(zhuǎn)導(dǎo)航初始化時,直接在游移方位角初始值中扣除該值。
3 試驗驗證
基于實時物理閉環(huán)校正的高精度平臺慣導(dǎo)系統(tǒng)空中動基座對準(zhǔn)方法完成地面調(diào)試、車載試驗、機(jī)載試驗,機(jī)載試驗情況如下。
參試子慣導(dǎo)為某高精度平臺慣導(dǎo)系統(tǒng),母慣導(dǎo)為處于連續(xù)GNSS衛(wèi)星修正狀態(tài)下的某高精度平臺慣導(dǎo)系統(tǒng)。機(jī)動方式為正反90°曲線機(jī)動、90°自然轉(zhuǎn)彎、繞機(jī)場盤旋三種。
按照上述對準(zhǔn)方案設(shè)計,在機(jī)載試驗中對誤差估計效果、子慣導(dǎo)校正效果、對準(zhǔn)后導(dǎo)航精度進(jìn)行了全面考核。7個架次動基座對準(zhǔn)后,子慣導(dǎo)純慣性導(dǎo)航1h的精度優(yōu)于1nmile(1σ),導(dǎo)航精度統(tǒng)計值如表1所示(基準(zhǔn)信息為GPS衛(wèi)星信息)。

表1 動基座對準(zhǔn)后子慣導(dǎo)純慣性導(dǎo)航精度統(tǒng)計Tab.1 Inertial navigation accuracy statistc of slave INS after moving alignment
典型試驗曲線如圖2~圖7所示。
分析試驗數(shù)據(jù)可知:
1)載體機(jī)動后,方位失調(diào)角估計即可穩(wěn)定收斂,收斂時間小于3min,方位失準(zhǔn)角估計精度穩(wěn)定且滿足要求;

圖2 機(jī)動航線Fig.2 Maneuver route

圖3 對準(zhǔn)期間方位失調(diào)角估計Fig.3 Estimation of azimuth misalignment angle during alignment

圖4 對準(zhǔn)期間水平軸陀螺漂移、方位失調(diào)角估計Fig.4 Estimation of gyro drift in the horizontal axis direction during alignment
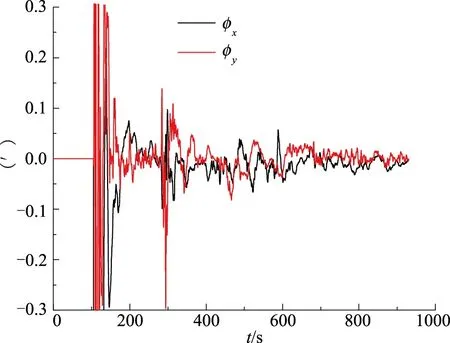
圖5 對準(zhǔn)期間水平軸平臺失調(diào)角估計Fig.5 Estimation of platform misalignment angles in the horizontal axis direction during alignment

圖6 對準(zhǔn)后純慣性導(dǎo)航速度誤差曲線Fig.6 Velocity error curves chart of inertial navigation after moving alignment

圖7 對準(zhǔn)后純慣性導(dǎo)航位置誤差曲線Fig.7 Location error curve chart of inertial navigation after moving alignment
2)方位失調(diào)角收斂后約300s,水平軸陀螺隨機(jī)常值漂移估計可穩(wěn)定收斂,估計精度0.01(°)/h左右;方位失調(diào)角收斂之前,方位失調(diào)角誤差耦合到水平軸陀螺隨機(jī)常值漂移中,水平軸陀螺隨機(jī)常值漂移的估計能夠收斂,但是估計精度將直接受到實際方位失調(diào)角影響;
3)平臺水平軸失調(diào)角對準(zhǔn)穩(wěn)定時間小于100s,在方位失調(diào)角估計過程中,水平軸失調(diào)角有小幅度震蕩,說明方位失調(diào)角估計精度對高精度平臺慣導(dǎo)系統(tǒng)的水平軸失調(diào)角估計有一定的耦合影響。水平軸失調(diào)角再此穩(wěn)定后,對準(zhǔn)精度進(jìn)一步提高,優(yōu)于10″;
4)動基座對準(zhǔn)下,按照上述設(shè)計方案,對準(zhǔn)后1h導(dǎo)航精度優(yōu)于1nmile(1σ)。
機(jī)載試驗表明,基于實時物理閉環(huán)校正的空中動基座對準(zhǔn)方法,對平臺慣導(dǎo)系統(tǒng)的導(dǎo)航精度有大幅提高。
4 結(jié)論
本報告設(shè)計一種基于實時物理閉環(huán)校正的動基座對準(zhǔn)方法,實現(xiàn)了高精度平臺慣導(dǎo)空中啟動、對準(zhǔn)的工程方案。經(jīng)機(jī)載試驗驗證,空中動基座對準(zhǔn)后純慣導(dǎo)1h導(dǎo)航精度優(yōu)于1nmile(1σ),具有較高的工程應(yīng)用價值。
[1] Titterton D H,Weston J L.Strapdown inertial navigation technology[M].USA:The American.Institute of Aeronautics and Astronautics and the Institution of Electrical Engineers,2004:342-344.
[2] Baziw J,Leondes C T.In-flight alignment and calibration of inertial measurement units,Part I:General formulation[J].IEEE Transactions on Aerospace and Electronic Systems,1972,8(4):439-449.
[3] 翁浚,秦永元,嚴(yán)恭敏,成研.車載動基座FOAM對準(zhǔn)算法[J].系統(tǒng)工程與電子技術(shù),2013,35(7):1498-1501.
[4] 嚴(yán)恭敏,翁浚,白亮,等.基于慣性參考系的動基座初始對準(zhǔn)與定位導(dǎo)航[J].系統(tǒng)工程與電子技術(shù),2011,3(3):618-621.
[5] 楊博,胡平華,敬軍,彈用平臺慣導(dǎo)系統(tǒng)空中動基座對準(zhǔn)技術(shù)[J].慣性技術(shù)學(xué)報,2007,15(2):151-154.
[6] 劉百奇,宮曉琳,房建成.基于GPS 觀測量和模型預(yù)測濾波的機(jī)載SINS /GPS 空中自對準(zhǔn)[J].中國慣性技術(shù)學(xué)報,2007,15(5):568-572.
[7] 王司,鄧正隆.機(jī)載導(dǎo)彈空中二次快速傳遞對準(zhǔn)方法研究[J].航空學(xué)報,2005,26(4):486-489.
[8] Hong H S,Lee J G,Park C G.In-flight alignment of SDINS under large initial heading error[C]//AIAA Guidance,Navigation,and Control Conference an Exhibit,Montreal,Canada,AIAA-2001-4183.
[9] 馮培德,糜秀娣,徐仕會,等.慣導(dǎo)系統(tǒng)在動基座條件下對準(zhǔn)的新途徑[J].中國慣性技術(shù)學(xué)報,2001,9(4):28-31.
[10] 房建成,祝世平,俞文伯.一種新的慣導(dǎo)系統(tǒng)靜基座快速初始對準(zhǔn)方法[J].北京航空航天大學(xué)學(xué)報,1999,25(6):728-731.
An In-flight Moving Alignment Method Based on the Real Time Physical Closed-loop Correction
HE Chang-jiu,XU Jing,GAO Wei-xi,TANG Zi-wei,WANG Zhong-hui
(Beijing Institute of Automatic Control Equipment,Beijing 100074,China)
In this paper,an in-flight moving alignment method which is based on the real time physical closed-loop correction,applying to the platform INS is put forward.In this method,the real time estimation of inertial navigation error is realized by using Kalman filter,and a feedback control is designed according to the optimal quadratic criterion to do the real time physical closed-loop correction for the platform of INS,which effectively guarantees the alignment precision.The navigation precision can be improved after in-flight moving alignment,verifying by airborne flight experiments.
High precision platform INS;In-flight moving alignment;Real time;Physical closed-loop correction
2015-11-09;
2015-11-12。
國家自然科學(xué)基金項目—基于三軸慣性穩(wěn)定平臺的輕小型航空/海洋重力儀研究(41527803)
何長久(1989-),男,碩士,助理工程師,主要從事慣性導(dǎo)航方面的研究。E-mail:hechangjiuok@163.com
U666.1
A
2095-8110(2016)01-0019-06