不確定超聲速導彈簡化模型的滑模控制研究
2016-03-16 02:56:59晉玉強李澤雪雷軍委
導航定位與授時 2016年2期
晉玉強,李澤雪,雷軍委
(海軍航空工程學院,山東 煙臺 264001)
不確定超聲速導彈簡化模型的滑模控制研究
晉玉強,李澤雪,雷軍委
(海軍航空工程學院,山東 煙臺 264001)
針對于超聲速導彈的參數時變、不確定的特點,在超聲速導彈簡化模型的基礎上研究了滑模變結構控制方法,通過理論分析和仿真實踐證明了滑模控制系統對于不確定系統具有較好的控制效果。并且與PID控制方法進行了對比,發現了滑模控制方法較PID控制方法具有更強的魯棒性。證明了滑模法對于不確定超聲速導彈的有效性。
滑模控制;不確定超聲速導彈;PID控制
0 引言
導彈的氣動參數會隨其飛行速度、飛行高度和大氣密度而變化,特別是導彈的飛行速度和飛行高度的變化范圍很大,因而導彈的數學模型參數也可以在很大的范圍內變化。在飛行過程中,導彈的質量和質心位置會隨著燃料的消耗而改變,這也會影響其數學模型的參數。當對象的數學模型參數在小范圍內變化時,可用一般的反饋控制、最優控制或補償控制等方法來消除或減小參數變化對控制品質的有害影響。超聲速導彈的飛行速度非常快,在導彈的飛行時間內,控制對象的參數變化范圍大,所以上面這些方法就不能圓滿解決問題了[1-5]。
滑模變結構控制(Sliding Mode Control,SMC)以其獨特的優點,如算法簡單,不要求被控對象具有精確的數學模型,當系統參數攝動和外界干擾符合完全匹配條件時,控制系統對它們具有不變性等[6-10],所以非常適合導彈控制系統設計。考慮到滑模變結構控制的優點,本文決定采用該方法來設計超聲速導彈控制系統。
本文在超聲速導彈簡化二階模型的基礎上,對滑模控制系統進行了研究,提出了二階滑模控制算法的一般概念和典型的滑模到達條件[11-12],根據該到達條件可以得到系統的控制器,最后將算法用于導彈控制系統設計,獲得了一些有實用價值的結論和方法。論文研究成果為滑模控制算法的研究注入了新思想,同時也為導彈控制系統設計提供了一種新的解決方案。因此,本課題的研究不僅具有理論意義,而且有十分重要的應用參考價值。
1 問題描述
飛行器控制一般可以分為內回路設計與外回路設計。外回路是在內回路穩定設計的基礎上,對飛行器的質心加以控制。因此內回路是飛行器穩定至關重要的核心回路。近年來,由于飛行器速度的增大,以及控制精度要求的提高,尤其是攻角測量與傳感技術的發展,基于攻角可測的攻角穩定回路設計,也具有越來越重要的工程應用價值。
本文是基于以上背景,采用攻角傳感器與陀螺儀,測量飛行器的攻角與俯仰姿態角速度,并構造一類同步系統,實現在氣動參數強不確定環境下的飛行器的攻角跟蹤控制。
按照傳統飛行器設計的特征點固化線性化思想,可以得到飛行器在某一特征點附近的線性化模型,該模型為二階系統,如下所示:
(1)
(2)
其中,aij為空氣動力學參數。滑模控制的目標為設計滑模控制器,使得導彈攻角α跟蹤期望值αd。
2 PID控制律設計
圖1所示為PID控制系統的結構圖,該系統由PID控制器和被控對象兩部分組成,PID控制器產生的控制信號對被控對象進行控制。其中PID控制器由比例(P)、積分(I)和微分(D)三個環節組成。

圖1 PID控制系統結構圖Fig.1 Structure of PID control system
PID控制器是一種線性控制器,它根據給定期望值αd與實際輸出值α構成控制偏差
e(t)=α-αd
(3)
PID的控制規律為
(4)
寫成傳遞函數的形式為
(5)
式中:kp為比例系數;TI為積分時間常數;TD為微分時間常數。
3 滑模控制律設計
假設:期望值αd為常值,其導數為0。
滑模控制系統的設計通常被認為是一種綜合方法,特點是簡單、靈活。設計滑模控制系統的基本步驟,包括兩個相對獨立的部分:
1)設計滑模函數s(x),使它所確定的滑動模態漸近穩定且有良好的品質。
2)求出滑模控制u(x),使系統滿足滑模到達條件,從而形成滑動模態。
這樣,滑模控制既保證趨近運動在有限時間內到達滑模面,又保證了滑模面是滑動模態區。一旦滑模函數s(x)和滑模控制u(x)都得到了,滑模控制系統就完全建立起來了。
定義誤差變量e=α-αd,則有
(6)
誤差二階導數為
(7)
對于誤差模型關鍵是如何消除誤差,采用滑模控制器可以達到消除誤差的作用。首先定義滑模面如下
(8)
為保證滑模面有意義,當滑模面等于0時,微分方程穩定,則有c1>0,c2>0。
然后求取滑模面的導數得
(a22-a34+c1)ωz+
(9)
定義:
(10)
l2=a22-a34
(11)
l3=c2
(12)
定義
(13)
設計
(14)
其中,k1、k2、k3為控制器參數。
定義:
(15)
(16)
(17)
則有
(18)
即
(19)
即
k1s2-k2sgn(s)s
(20)
定義權值調節規律如下:
(21)
(22)
(23)
其中,Γ1、Γ2、Γ3為權值調節參數。
選取Lyapunov函數
(24)
求導得
(25)
選取Lyapunov函數
(26)
則有
k1s2-k2sgn(s)s
(27)
選取系統總Lyapunov函數為
V=V1+V2
(28)
求取其導數得
(29)
可見系統在滑模控制的作用下是穩定的,而且并不需要系統的增益為較大值。
4 仿真分析
本文采用超聲速導彈在某一特征點的氣動參數進行仿真分析說明,氣動參數取值如下:
a25=-167.87;a35=0.243;a22=-2.876;
a24=-193.65;a34=1.584
由于導彈在數字仿真中采用的氣動數據為風洞吹風所得數據插值所得。因此導彈實際飛行中氣動數據可能和仿真中數據有差別,因此我們在特征點附近采用將全部氣動數據上下攝動50%甚至500%來驗證所設計的控制器的魯棒性。
4.1PID控制仿真結果
以選取超聲速導彈特征點為被控系統參數,經過多次仿真并修改控制參數,最后選取控制器參數如下:
kp=2,ki=5,kd=5
首先在無參數攝動情況下進行仿真,可以得到如圖2所示仿真結果。
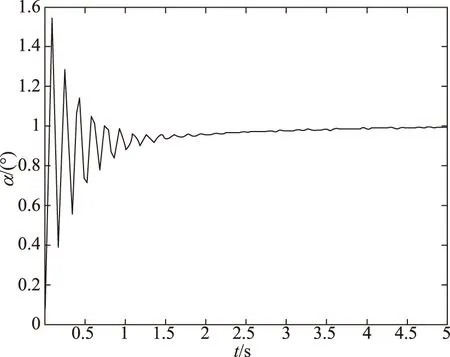
圖2 PID仿真結果Fig.2 Simulation result of PID control
然后考慮有參數攝動的情況。設固定攝動量k,此時攝動后彈體參數為:
A22=a22(1+k);
A24=a24(1+k);
A25=a25(1+k);
A34=a34(1+k);
A35=a35(1+k)。
信號期望均為1,如圖3~圖8所示仿真結果。
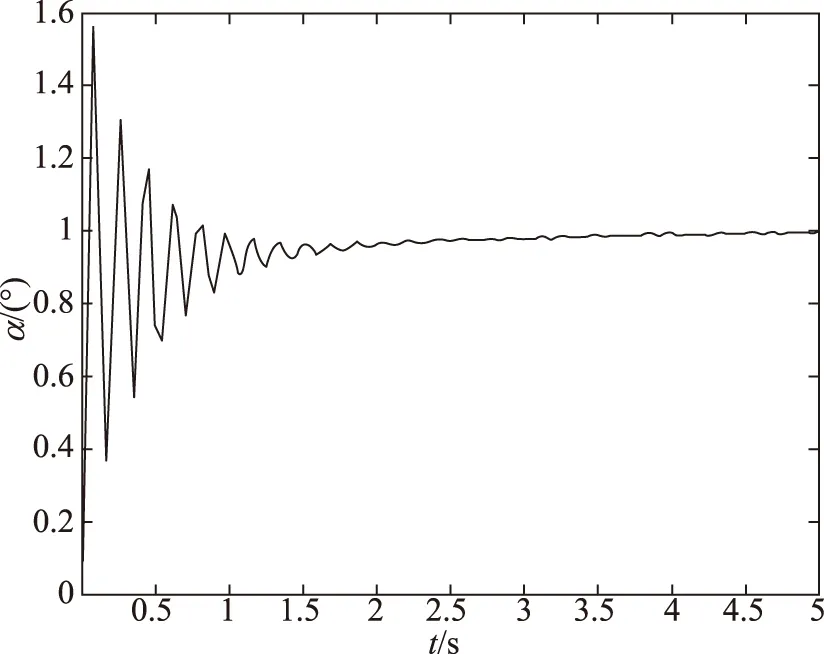
圖3 k=-10%時仿真結果Fig.3 The result of k=-10%
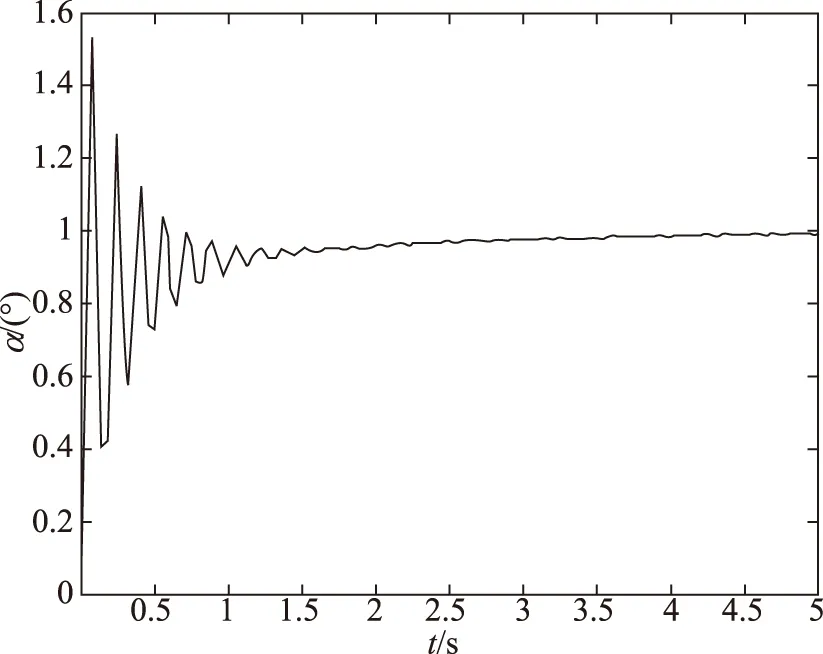
圖4 k=10%時仿真結果Fig.4 The result of k=10%
設隨機攝動量為KS,由于該攝動量為隨機量,在選取隨機數值時本文采用MATLAB中rand函數指令,可得隨機攝動量的表達式為
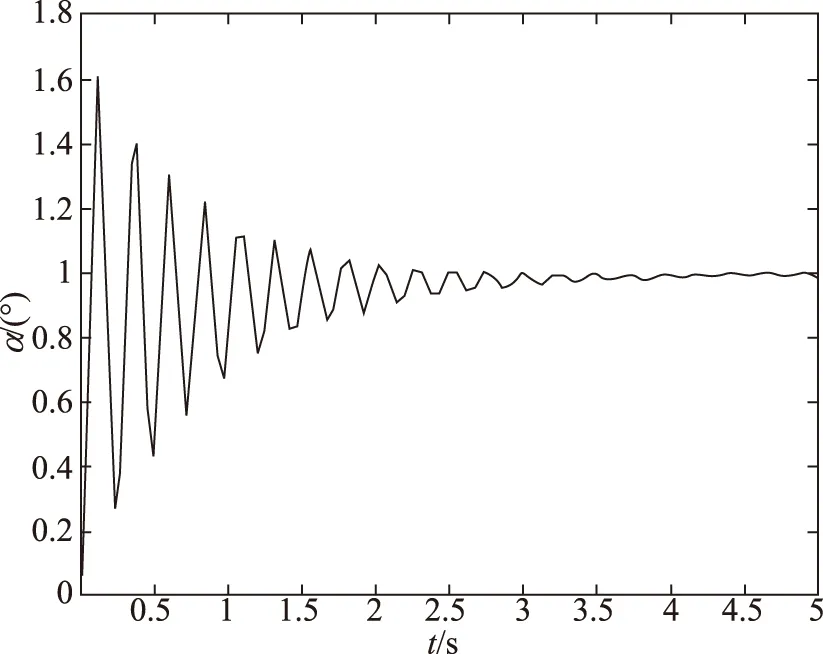
圖5 k=-50%時仿真結果Fig.5 The result of k=-50%

圖6 k=50%時仿真結果Fig.6 The result of k=50%

圖7 k=-90%時仿真結果Fig.7 The result of k=-90%
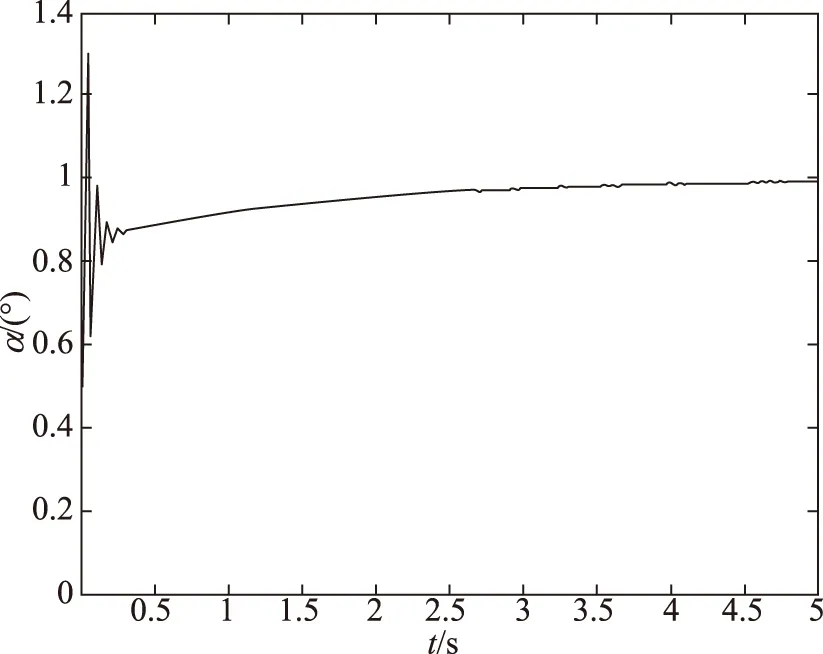
圖8 k=500%時仿真結果Fig.8 The result of k=500%
ks=2K·(rand(5,1)-0.5)
(30)
其中變量rand函數表示一范圍(0,1)的隨機數值,K為隨機攝動量范圍的絕對值,在MATLAB軟件中每執行一次該函數指令都可以產生相應攝動范圍內的5個隨機數,即ks1、ks2、ks3、ks4、ks5。
此時,攝動后彈道參數為:
A22=a22(1+ks1);A24=a24(1+ks2);
A25=a25(1+ks3);A34=a34(1+ks3);
A35=a35(1+ks5)
可以得到如圖9~圖12所示仿真結果。
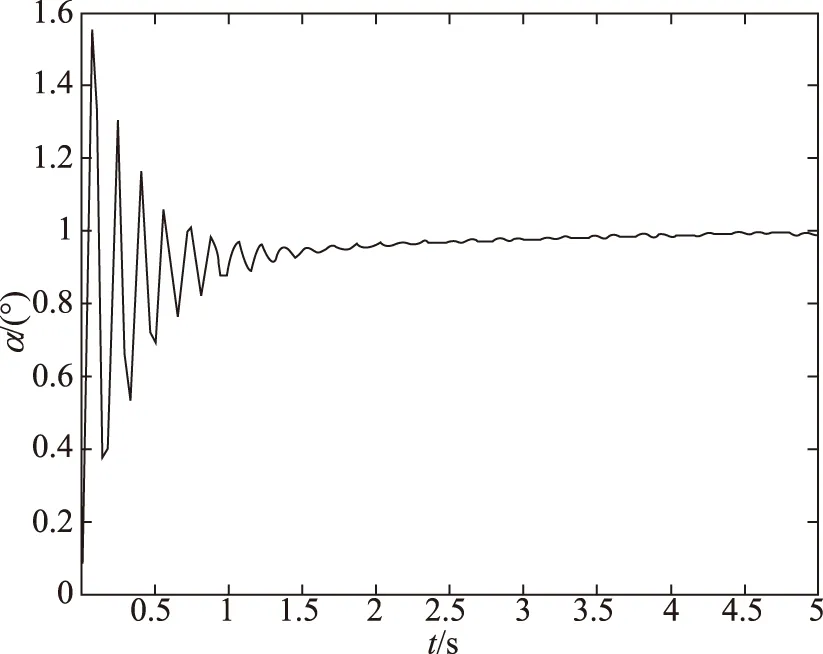
圖9 ks∈(-10%,10%)時仿真結果Fig.9 The result of ks∈(-10%,10%)
仿真結果表明,在較小范圍的擾動下,采用PID控制可以保證系統的穩定。但是當擾動范圍變大,特別是負擾動的情況下,系統會出現不穩定,并且有較大的震蕩。
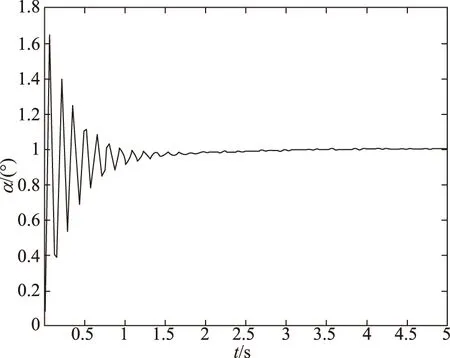
圖10 ks∈(-50%,50%)時仿真結果Fig.10 The result of ks∈(-50%,50%)

圖11 ks∈(-90%,100%)時仿真結果Fig.11 The result of ks∈(-90%,100%)
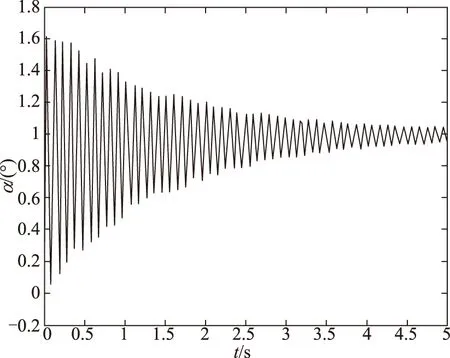
圖12 ks∈(-90%,500%)時仿真結果Fig.12 The result of ks∈(-90%,500%)
4.2 滑模控制仿真結果
選取控制器參數如下:
c1=8,c2=5,Γ1=1,Γ2=1,Γ3=1,
k1=20,k2=20,k3=20
首先在無參數攝動情況下進行仿真,可以得到如圖13所示仿真結果。
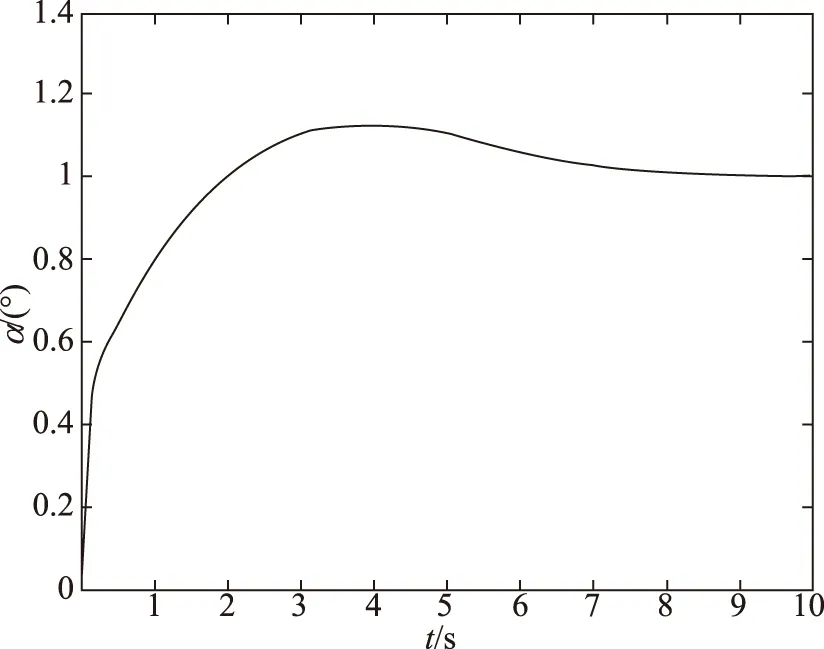
圖13 滑模控制仿真結果Fig.13 The result of sliding mode
然后按照PID固定參數攝動的方法進行仿真,可以得到如圖14~圖19所示仿真結果。
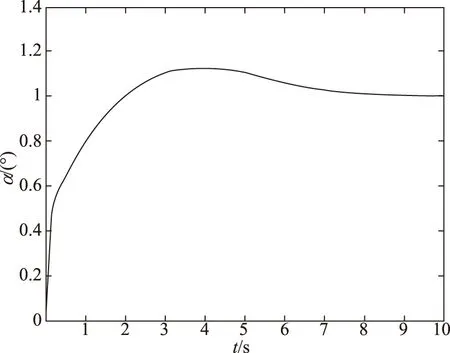
圖14 k=-10%時仿真結果Fig.14 The result of k=-10%

圖15 k=10%時仿真結果Fig.15 The result of k=10%
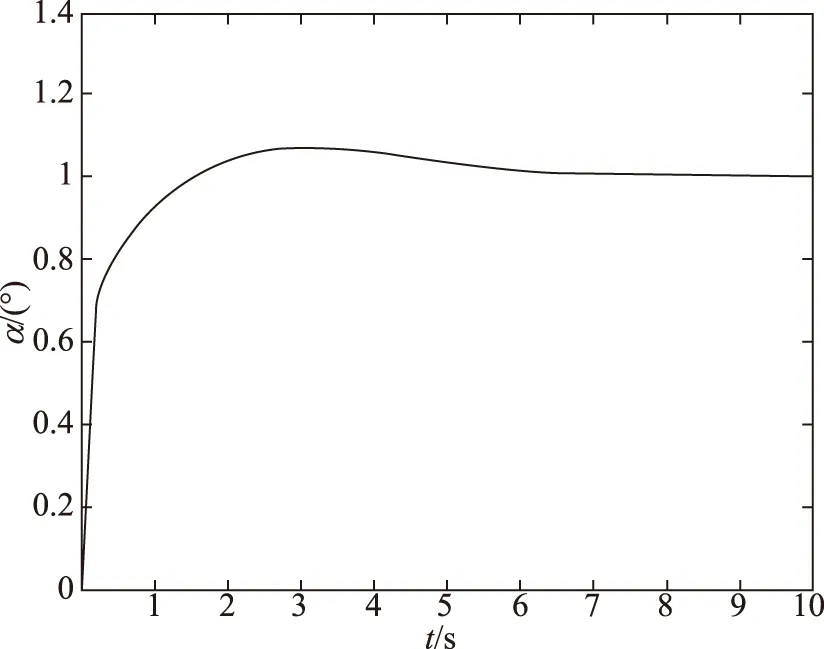
圖16 k=-50%時仿真結果Fig.16 The result of k=-50%
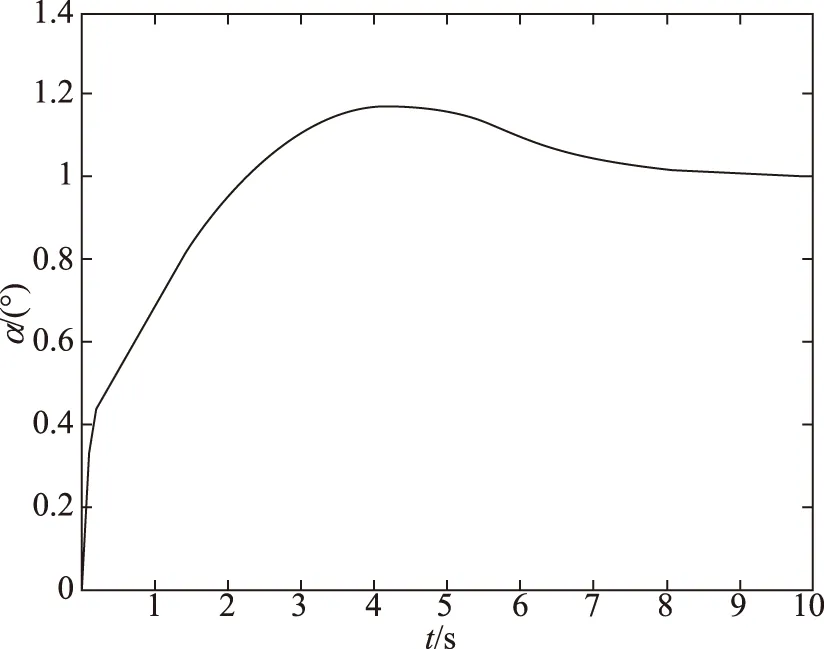
圖17 k=50%時仿真結果Fig.17 The result of k=50%
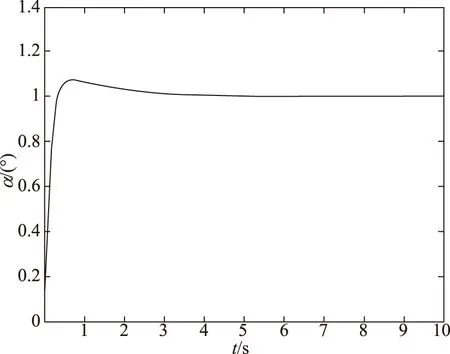
圖18 k=-90%時仿真結果Fig.18 The result of k=-90%
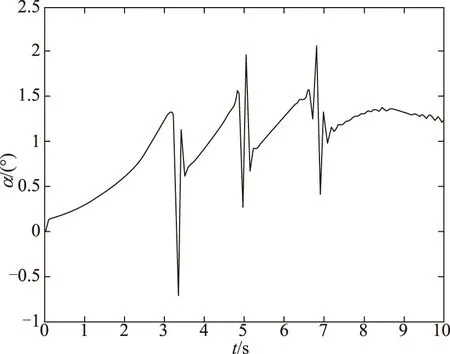
圖19 k=500%時仿真結果Fig.19 The result of k=500%
最后按照PID隨機參數攝動的方法進行仿真,可以得到如圖20~圖23所示仿真結果。
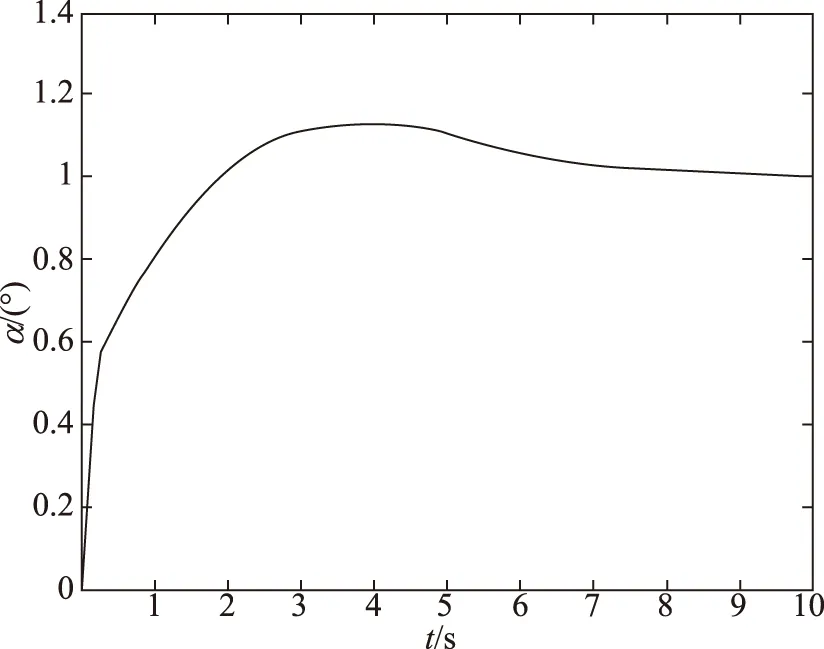
圖20 ks∈(-10%,10%)時仿真結果Fig.20 The result of ks∈(-10%,10%)
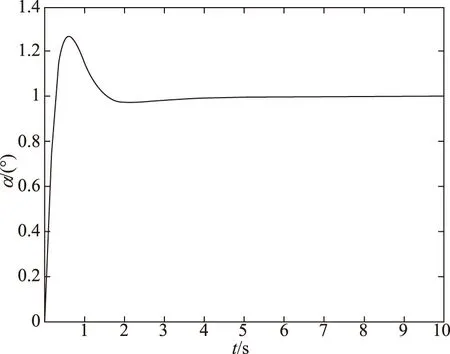
圖21 ks∈(-50%,50%)時仿真結果Fig.21 The result of ks∈(-50%,50%)

圖22 ks∈(-90%,100%)時仿真結果Fig.22 The result of ks∈(-90%,100%)

圖23 ks∈(-90%,500%)時仿真結果Fig.23 The result of ks∈(-90%,500%)
仿真結果在不同的攝動情況下都穩定,說明了該控制方法有較強的魯棒性。
4.3 對比與分析
通過對比PID控制方法可以知道,采用兩種不同的控制方法都可以使被控系統在選取的特征點穩定,并且在小范圍的參數攝動下仍然保持穩定,但是在較大范圍的參數攝動情況下,采用PID控制的系統較采用滑模方法控制的系統控制效果較差一些。尤其是當參數攝動為隨機攝動時,采用PID控制的系統與采用滑模控制的系統存在著一定差距。
由此可以得出結論:在控制模型參數確定的情況下,PID和滑模兩種控制方法都有不錯的控制效果,但是PID控制的系統的魯棒性要略差于滑模控制的系統,當被控系統的數學模型不確定或者變化較大時,采用滑模法控制的效果要優于PID控制。
5 結束語
由于傳統的PID控制方法需要知道被控系統的標稱數學模型,但是超聲速導彈模型具有時變、不確定等特點,采用PID控制效果并不能保證所有情況均有理想的控制性能。所以針對簡化的超聲速導彈模型,本文提出了一種滑模控制方法,并對比了兩種控制方法在不同參數攝動情況下的控制效果,發現參數變化范圍較大的情況下,滑模控制方法效果要遠遠優于PID控制方法。這表明采用滑模法控制時,可以在并不精確地知道二階系統模型參數的情況下,依然獲得不錯的控制效果,使系統具有較好的魯棒性。由此采用滑模法設計的控制系統在模型參數時變、不確定的超聲速導彈中會有較好的應用前景。
[1] 袁贛南,左志丹,曲桂婷,紀紅.二階滑模變結構控制系統的滑模到達條件[J].華中科技大學學報,2013(6):70-75.
[2] 袁贛南,左志丹,孫寧博.基于趨近律的二階滑模變結構控制[J].系統工程與電子技術.
[3]ShtesselYB,ShkolnikovIA,LevantA.Guidanceandcontrolofmissileinterceptorusingmodes[J].IEEETransactionsonAerospaceandElectronicSecond-OrderSlidingSystems,2009,45(1):110-124.
[4]DuanChao-yang,ZhangYing-xin.Adaptiveslidingmodecontrolforbank-to-turnmissiles[C]//.The9thIEEEInternationalConferenceonElectronicMeasurement&Instruments,2009,3:512-517.
[5] 王志,周軍,周鳳岐.低速滾轉導彈彈道導彈運動模型及變結構姿態控制系統設計[J].兵工學報,2007,28(7):849-853.
[6]CastilloTB,CastroLR.Onrobustregulationviaslidingmodefornonlinearsystems[J].System&Controlletters,1995,24:361-371.
[7]ShtesselY,HallC,JacksonM.Reusablelaunchvehiclecontrolinmultiple-tmie-scaleslidingmodes[J].JournalofGuidance,ControlandDynamics,2000,23(6):1013-1020.
[8]XuH,MirmiranniMD,IoannouPA.Adaptiveslidingmodecontroldesignforahypersonicflightvehicle[J].JournalofGuidance,ControlandDynamics,2004,27(5):829-838.
[9]SepulchreR,JankovicM,KokotovicPV.Constructivenonlinearcontrol[M].NewYork:Springer,1997.
[10]JankovicM,FontaineD,KokotovicPV.Constructivelyapunovstabilizationofnonlinearcascadesystems[J].IEEETransactiononAutomaticControl,1996,41(12):1723-1735.
[11]JiangZP,PralyL.Robustadaptivecontrollersfornonlinearsystemswithdynamicuncertainty[J].Automatica,1998,34(7):825-840.
[12]QianChun-jiang,WeiLin.Non-Lipschitzcontinuousstabilizersfornonlinearsystemswithuncontrollableunstablelinearization[J].Systems&ControlLetters,2001,42:185-200.
Research on Sliding-mode Control Based on Uncertain Simplified Model of Supersonic Missile
JIN Yu-qiang,LI Ze-xue,LEI Jun-wei
(Naval Aeronautical and Astronautical Engineering University,Yantai 264001,China)
Based on the uncertain supersonic missile simplified model parameters that are time-varing and uncertain,this article focuses on the research of sliding-mode control.Through the theoretical analysis and the simulation,it is proved that the sliding mode control for the uncertain system has a better control effect.And compared with the PID control method,sliding mode control has better robustness.The validity of the sliding mode control of uncertain supersonic missile is proved.
Uncertain supersonic missile;Sliding mode control;PID control
2015-05-07;
2015-09-10。
晉玉強(1977-),男,副教授,碩士生導師,主要從事導航制導與控制方面的工作。
TM273
A
2095-8110(2016)02-0025-08
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
