光纖慣導系統連續旋轉對準技術研究
2016-03-16 03:04:48何長久鄒志勤高偉熙
導航定位與授時 2016年2期
關鍵詞:系統
何長久,鄒志勤,鄒 瑛,高偉熙
(北京自動化控制設備研究所,北京100074)
光纖慣導系統連續旋轉對準技術研究
何長久,鄒志勤,鄒 瑛,高偉熙
(北京自動化控制設備研究所,北京100074)
初始對準是慣性導航的關鍵技術之一,對準結果會直接影響系統的導航精度。針對光纖陀螺慣導系統,縮短對準時間、提高系統對準精度等技術難點,開展了高精度光纖慣導系統連續旋轉對準技術研究,深入分析了常值陀螺漂移、隨時間變化的陀螺漂移、陀螺標度因數常值誤差、陀螺標度因數不對稱誤差、陀螺安裝誤差、陀螺隨機游走等誤差項對系統對準精度的影響,對比了現有旋轉方案的優點與不足,提出了一種改進的單軸二位置旋轉方案。試驗結果表明,在采用該旋轉方案的情況下,對準時間8min方位角對準精度可達到30″(1σ),具有重要的工程應用價值。
慣導系統;旋轉調制;誤差分析;旋轉方案
0 引言
光纖陀螺捷聯慣導系統通常采用單位置或雙位置對準方式[1]。近年來,隨著旋轉調制技術的發展,連續旋轉對準方式成為光纖陀螺慣導系統實現高精度對準的有效技術手段[2-3],其通過IMU繞旋轉軸作有規律的運動,使主要器件誤差在旋轉周期內受到調制,進而大幅提升系統對準精度和對準收斂速度,成為工程應用研究的熱點之一。
為了縮短旋轉調制慣導系統的對準時間,同時提高系統的對準精度,本文采用單軸旋轉對準方案。文中對IMU系統的各類誤差做了理論推導和仿真分析,為IMU系統器件選型提供了理論依據,通過對光纖慣導系統旋轉對準[4-5]與單位置、多位置對準方案的數學仿真,比較了各對準方案的仿真結果。
1 對準誤差分析

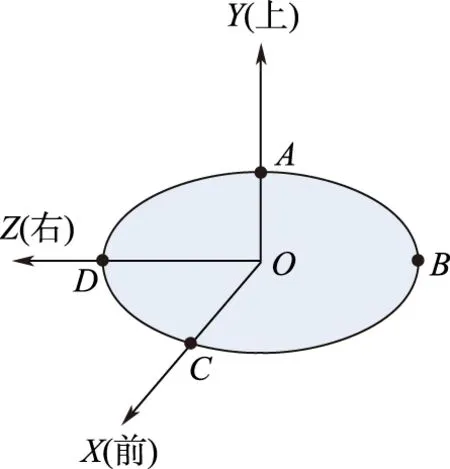
圖1 載體坐標系示意圖Fig.1 The vector diagram of the coordinate system
以一種典型的旋轉方案為例,對IMU系統各誤差項進行分析,典型旋轉方案描述如下:
次序1:IMU從A點出發,順時針旋轉經過B點,到達位置C點,在C點處的停留時間為Ts;
次序2:IMU從C點出發,順時針旋轉經過D點,到達位置A點,在A點處的停留時間為Ts;
次序3:IMU從A點出發,逆時針旋轉經過D點,到達位置C點,在C點處的停留時間為Ts;
次序4:IMU從C點出發,逆時針旋轉經過B點,到達位置A點,在A點處的停留時間為Ts;
之后重復上述旋轉過程。
1.1 常值陀螺漂移
將陀螺常值漂移偏置轉換到b系(即n系),得到
(1)
推導可知,在一個旋轉調制周期內,b系中等效陀螺漂移平均值可表示為
(2)
分析式(2)可知:經過旋轉調制后,影響對準精度的主要因素——水平陀螺漂移被調制平均為零。
1.2 隨時間變化的陀螺漂移
假定陀螺隨時間的漂移偏置為
(3)
將陀螺漂移轉換到b系(n系)為
(4)
其中:
a1、b1、c1—為陀螺漂移隨時間的一次系數,
a2、b2、c2—為陀螺漂移隨時間的二次系數。
取ρ0=0,在一個旋轉調制周期內,b系中等效陀螺漂移為
(5)
分析式(5)可知:在一個旋轉周期內,東向、北向隨時間變化的陀螺漂移經過旋轉調制后,調制為與時間無關的常值漂移,但是天向陀螺漂移保持不變。
1.3 陀螺標度因數常值誤差
假定IMU系統中,x、y、z軸方向的標度因數常值誤差為kx、ky、kz。
IMU系統在旋轉周期內理論測量值為
(6)
IMU系統旋轉周期內實際輸出值為
(7)
其中:
I為單位向量,
K=diag[kxkykz]為陀螺標度因數常值誤差。
標度因數常值誤差引起的測量誤差為
(8)
IMU系統只存在陀螺標度因數常值誤差時,經過旋轉調制后,被調制平均為
(9)
分析(9)式可知:旋轉調制技術對陀螺標度因數常值誤差無調制作用。
1.4 陀螺標度因數不對稱誤差


(10)

標度因數不對稱誤差引起的測量誤差為
(11)
IMU系統只存在陀螺標度因數常值誤差時,經過旋轉調制后,被調制平均為
(12)
分析式(12)可知:經過旋轉調制后,陀螺標度因數不對稱誤差被調制平均為零。
1.5 陀螺安裝誤差
假定IMU系統中,x陀螺對y陀螺的安裝誤差角為Δδxy,對z陀螺的安裝誤差角為Δδxz;y陀螺對x陀螺的安裝誤差角為Δδyx,對z陀螺的安裝誤差角為Δδyz;z陀螺對x陀螺的安裝誤差角為Δδzx,對y陀螺的安裝誤差角為Δδzy。

(13)
安裝誤差角引起的角速度誤差為
Δωb=ωb′-ωb
(14)
IMU系統存在陀螺安裝誤差時,經過旋轉調制后,被調制平均為
(15)
分析式(15)可知:當固定旋轉角速率時,減小旋轉調制過程中的停留時間,可以減少安裝誤差。
1.6 陀螺隨機游走
陀螺角速率測量噪聲X(t)為均值為0的白噪聲,滿足:
E(X(t))=0
(16)
E(X(t)X(τ))=σ2δ(t-τ)
(17)
積分后造成的角度誤差ε(t)應滿足
(18)
即

(19)
有
E(ε(t))=0
(20)
假定對準時間為T,且假定對準過程中旋轉周期為整數,則等效陀螺漂移為
(21)
(22)
其中,東向、天向、北向陀螺隨機游走誤差的方差為σx、σy、σz。
分析式(22)可知:陀螺隨機游走漂移系數較大,且不可調制,因此應根據對準時間和精度的要求提出光纖陀螺隨機游走的指標。
三軸加速度組合件測量誤差表達式與三軸速率陀螺測量誤差表達式具有相同的形式,因此,在經過單軸旋轉調制平均后,在b系中表示的加速度測量誤差與式(2)、式(5)、式(9)、式(12)、式(15)具有相同的形式,只是將式中的角速度變量改為對應的比力就可以了[5]。
2 連續旋轉的實現方案
慣導系統通電啟動后,開始自對準流程,且對準時間為8min;然而光纖陀螺在加電啟動過程中,陀螺漂移對溫度變化較為敏感,在此可以將隨溫度變化的陀螺漂移轉變為隨開機時間變化的陀螺漂移,因此需結合光纖慣導系統具體特點研究適合工程應用的連續旋轉方案。
文中提出了一種改進的單軸二位置旋轉方案,該旋轉方案為控制旋轉機構使IMU在圖1中的A、C兩位置間循環運動,其轉動過程可以描述如下:
次序1:IMU從A點出發,順時針旋轉經過B點,到達位置C,停留時間為Ts;
次序2:IMU從C點出發,逆時針旋轉經過B點,到達位置A,停留時間為Ts;
次序3:IMU從A點出發,逆時針旋轉經過D點,到達位置C,停留時間為Ts;
次序4:IMU從C點出發,順時針旋轉經過D點,到達位置A,停留時間為Ts。
之后IMU按照次序1~4的順序循環運動。在一個旋轉周期內,IMU系統只在0°和180°位置上有停留,且這兩個位置是互相對稱的,IMU誤差值相互抵消。與典型的單軸旋轉方案相比,改進的單軸二位置旋轉方案對隨時間變化的陀螺漂移、速度補償效果更好。
結合第1節誤差分析可知,在IMU精度相同的情況下,為了提高慣導系統的對準精度,需要減小慣導系統旋轉調制周期,可以通過以下兩種方法實現:1)增大旋轉調制角速率;2)縮短旋轉調制在位置上的停留時間。但是,增加旋轉速度會使y軸陀螺標度因數產生連續增長的方位誤差。因此,連續旋轉角速率確定需要在兩項誤差之間進行折中,經理論分析與試驗驗證,旋轉角速率設定為18(°)/s。
以實際系統為例,IMU系統的轉動慣量為:I=1.4043kg·m,電機最大輸出力矩為:J=1.4N·m,旋轉調制角速率為:ω=18(°)/s,所以IMU系統從正轉至反轉所需的最短時間為:ΔT=0.35s,若停止時間Ts設定為0.35s,旋轉框架在啟動和停止過程中都不穩定,影響系統的對準精度,因此,經過試驗驗證,將IMU的停留時間Ts設定為1s,在這種情況下,旋轉框架能夠平穩運轉,對準精度得到很大改善。
3 仿真分析
3.1 仿真結果及分析
3.1.1 陀螺漂移偏置
設定IMU系統北、天、東三個軸方向陀螺漂移都為0.05(°)/h,IMU系統北、天、東三個軸方向陀螺隨時間漂移都為0.01(°)/h:精對準仿真時間為8min,仿真結果如圖2所示。
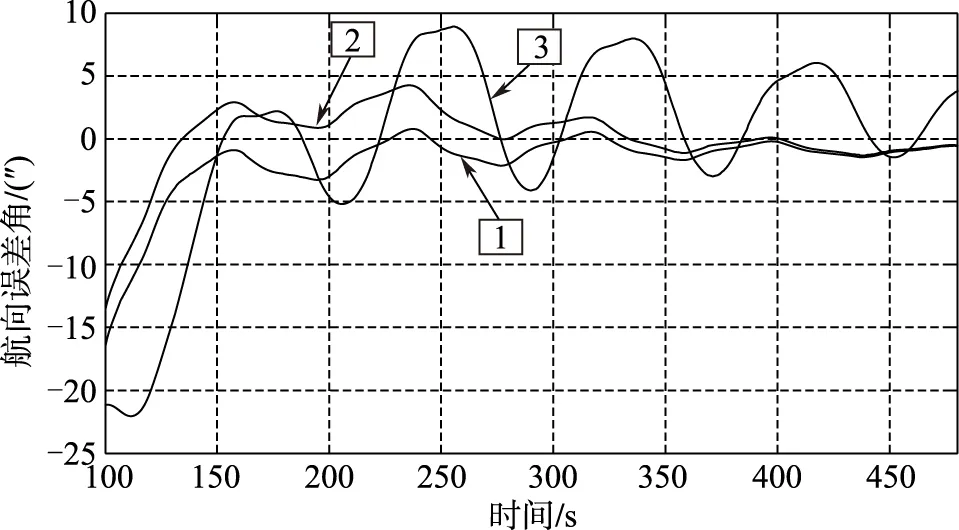
圖2 陀螺漂移—航向對準誤差角曲線Fig.2 The gyro drift-error curve of heading
圖2中,曲線1為理想旋轉調制式慣導系統航向誤差曲線,系統在8min內的對準精度為1.0″以內;曲線2為三個方向陀螺附加常值漂移后的航向誤差曲線,對準精度仍在1.0″以內;曲線3為系統附加陀螺隨時間漂移后的航向誤差曲線,對準精度為10.0″。可知:系統附加陀螺常值漂移時,精對準過程中濾波收斂時間不變,收斂精度不變,在旋轉調制過程中,陀螺常值漂移幾乎不影響對準精度;系統附加隨時間變化的陀螺漂移時,精對準過程中濾波收斂時間增加,收斂精度降低,在旋轉調制過程中,陀螺隨時間漂移對對準精度有很大影響。
3.1.2 標度因數誤差

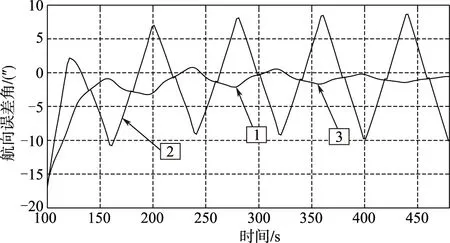
圖3 陀螺標度因數—航向對準誤差角曲線Fig.3 The gyro scale factor-error curve of heading
圖3中,曲線1為理想旋轉調制式慣導系統航向誤差曲線,系統在8min內的對準精度為1.0″;曲線2為陀螺附加標度因數對稱性誤差后系統航向誤差曲線,對準精度幅值在10.0″范圍內振蕩;曲線3為系統附加標度因數不對稱性誤差系統航向誤差曲線,對準精度仍為1.0″。
3.1.3 安裝誤差
設定IMU系統北、天、東三個方向陀螺對x、y、z軸的安裝誤差都為:δ=10″,精對準仿真時間為8min,仿真結果如圖4所示。

圖4 陀螺安裝誤差—航向對準誤差角Fig.4 The gyro misalignment-error curve of heading
圖4中,曲線1為理想旋轉調制式系統航向誤差曲線,系統在8min內對準精度約為1″;曲線2為IMU系統附加安裝誤差時的系統航向誤差曲線,系統對準精度約為3″。
3.1.4 隨機游走

圖5 陀螺隨機游走—航向對準誤差角Fig.5 The gyro random noise-error curve of heading
圖5中,曲線1為陀螺理想狀態光纖捷聯慣導系統航向誤差曲線,系統在8min內對準精度約為1.0″;曲線2為IMU系統附加陀螺隨機游走系統航向誤差曲線,對準精度約為10.0″。可知:陀螺存在隨機游走誤差項時,慣導系統的對準精度降低。
3.1.5 對準方案的比較

圖6 航向對準誤差角Fig.6 The misalignment angle of heading
圖6中,曲線1為慣導系統單位置對準方案航向誤差曲線,統計后系統對準精度在120′范圍內振蕩;曲線2為慣導系統二位置對準方案航向誤差曲線,統計后系統對準精度在30.0′范圍內振蕩;曲線3為慣導系統按改進旋轉方案對準后的航向誤差曲線,統計之后系統對準精度在45.0″范圍內振蕩,仿真實踐表明:采用連續旋轉對準方案精度,相比之前的單位置對準、雙位置對準有大幅度提升。
3.2 慣導系統對準精度測試
本文將旋轉調制慣導系統水平放置于實驗室轉臺上,分別鎖定在方位角為0°、45°、90°、135°、180°、225°、270°、315°八個位置上進行對準測試,對準時間為8min。實驗中,為了避免試驗結果的偶然性,將慣導系統重新安裝兩次,測試結果如表1所示。
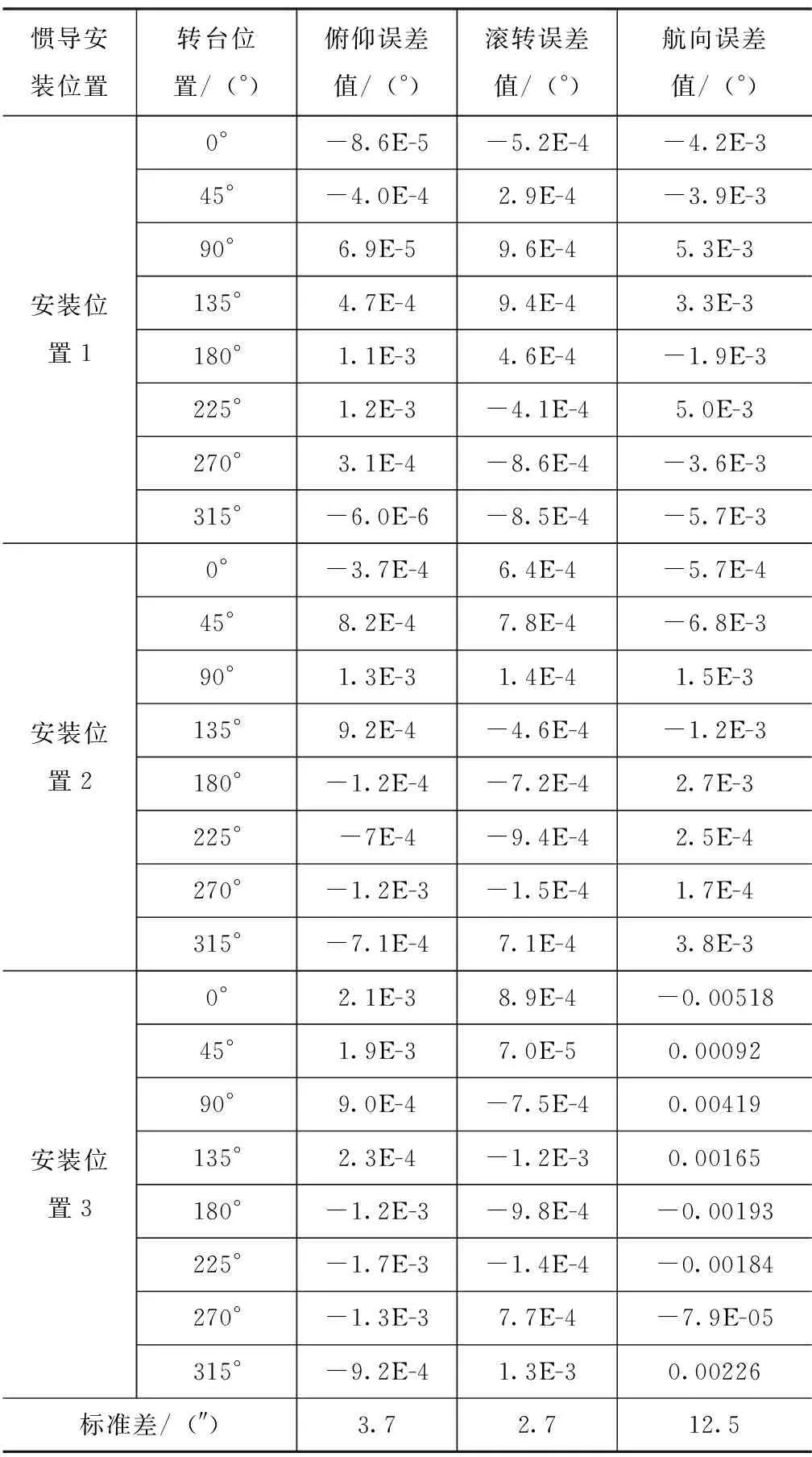
表1 慣導系統對準測試Tab.1 The test of INS alignment
從表1可知:慣導系統經過三個不同位置安裝后,對準精度優于15″。
4 結語
本文對光纖陀螺慣導系統連續旋轉對準方案的誤差因素進行了理論分析和仿真,結合旋轉調制慣導系統自身的特性,提出了工程可用的旋轉方案。通過數學仿真對連續旋轉對準方案與傳統單位置對準、多位置對準方案進行了對比,結果表明連續旋轉對準方案在收斂速度和對準精度方面均優于后兩者,具有重要的工程應用價值。
[1] Li An,Chang Guobin,Qin Fangjun,et al.Improvedprecision of strapdown inertial navigation system brought by dual-axis continuous rotation of inertial measurement unit[C]//2010 2ndInternational Asia Conference on Informatics in Control,Automation and Robotics.2010:284-287.
[2] 高鐘毓.慣性導航技術[M].北京:清華大學出版社,2012:224-253.
[3] Banerjee K,Dam B,Majumdar K,et al.An improveddither-stripping scheme for strapdown ring laser gyroscopes[J].IEEE Transaction on Aerospace and Electronic Systems,2004,7(2):54-59.
[4] 翁海娜,陸全聰,黃昆,等.旋轉光學陀螺捷聯慣導系統的旋轉方案設計[J].中國慣性技術學報,2009,17(1):8-14.
[5] Yuan Baolun,Liao Dan,Han Songlai.Error compensation of an optical gyro multi-axis rotation[J].Measurement Science and Technology,2012,23(2):297-301.
[6] 可偉,喬海巖,孟凡強.船用激光陀螺慣導單軸旋轉系統[J].艦船科學技術,2012,34(12):67-71.
Initial Alignment of Rotation-modulation Strapdown Inertial Navigation System
HE Chang-jiu,ZOU Zhi-qin,ZOU Ying,GAO Wei-xi
(Beijing Institute of Automation Control Equipment,Beijing 100074,China)
The initial alignment technology is one of the key technology of inertial navigation,and its precision will affect the navigation result.Studying of the initial alignment of rotation-modulation strapdown inertial navigation system in order to shorten the alignment time and improve alignment accuracy.Analyzing the errors of IMUs that impact the precision of navigation system,include the constant drift of gyro,the drift over time of gyro,the constant error of scale factor of gyro,the asymmetric error of scale factor of gyro,gyro misalignment,the random error of gyro and so on.Compare the advantages and disadvantages of the existing rotation scheme,proposed an improved single-axis rotation scheme second position.The result of experiment show that the heading error is less than 30″ after 8min initial alignment experiments in the scheme,the scheme has great merits in engineering applications.
Navigation system;Rotation modulation;Error analysis;Rotating scheme
2014-10-11;
2015-04-10。
何長久(1989-),男,碩士,主要從事慣性導航系統的初始對準技術的研究。E-mail:hechangjiuok@163.com
U666.12
A
2095-8110(2016)02-0001-06
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
