攻擊角度約束下打擊機(jī)動目標(biāo)的制導(dǎo)律
2016-03-16 06:58:47崔文昊池曉輝
導(dǎo)航定位與授時(shí) 2016年5期
關(guān)鍵詞:結(jié)構(gòu)
王 健,崔文昊, 史 震,池曉輝
(哈爾濱工程大學(xué)自動化學(xué)院,哈爾濱 150001)
攻擊角度約束下打擊機(jī)動目標(biāo)的制導(dǎo)律
王 健,崔文昊, 史 震,池曉輝
(哈爾濱工程大學(xué)自動化學(xué)院,哈爾濱 150001)
針對某些導(dǎo)彈要求限制末端攻擊角度的作戰(zhàn)要求,基于滑模變結(jié)構(gòu)控制理論,面向機(jī)動目標(biāo),設(shè)計(jì)了一種同時(shí)滿足脫靶量和攻擊角度約束要求的制導(dǎo)律。采用自適應(yīng)滑模趨近律,并將目標(biāo)機(jī)動視為干擾,利用線性變結(jié)構(gòu)制導(dǎo)律推導(dǎo)出目標(biāo)加速度的估計(jì)方程,并通過仿真證實(shí)了其有效性。所設(shè)計(jì)的制導(dǎo)律形式簡單、實(shí)用。仿真結(jié)果表明,該制導(dǎo)律能夠以期望的攻擊角度命中目標(biāo),并對所提出制導(dǎo)律的性能進(jìn)行了分析,具有一定的工程應(yīng)用價(jià)值。
末端攻擊角度約束;變結(jié)構(gòu)控制;目標(biāo)加速度的估計(jì)方程;脫靶量;制導(dǎo)律
0 引言
在實(shí)際應(yīng)用中,一些精確制導(dǎo)武器(如動能攔截器、反坦克導(dǎo)彈、反艦導(dǎo)彈、魚雷等)對目標(biāo)的攻擊,為了提高命中效率和毀傷效果,往往對攔截時(shí)刻導(dǎo)彈的攻擊角度有一定的要求。
自從Kim和Grider首次在機(jī)動彈頭再入制導(dǎo)的研究中引入落角約束問題以來[1],一些學(xué)者根據(jù)不同的應(yīng)用背景,不同的理論方法提出多種具有終端角度約束的導(dǎo)引律。文獻(xiàn)[2]假定中制導(dǎo)與末制導(dǎo)銜接很好,考慮自尋的導(dǎo)引頭框架角的限制,設(shè)計(jì)了平面內(nèi)末制導(dǎo)階段的最優(yōu)制導(dǎo)律,在所需控制能量最小的前提下可以實(shí)現(xiàn)攻擊角度的約束;文獻(xiàn)[3]設(shè)計(jì)了帶終端角度約束的變結(jié)構(gòu)制導(dǎo)律,在目標(biāo)不機(jī)動和隨機(jī)機(jī)動的情況下都能滿足攻擊角度的要求,并給出了制導(dǎo)律的收斂性證明。在最新的研究中,開始研究約束目標(biāo)攻擊角度的三維制導(dǎo)律,以及考慮導(dǎo)彈的動態(tài)特性和有限時(shí)間收斂下的制導(dǎo)律。
本文基于變結(jié)構(gòu)控制理論,設(shè)計(jì)了攻擊角度約束下打擊機(jī)動目標(biāo)的變結(jié)構(gòu)制導(dǎo)律,并用線性變結(jié)構(gòu)制導(dǎo)律推導(dǎo)出了目標(biāo)加速度的估計(jì)方程,并證實(shí)了其有效性。
1 末端攔截問題的數(shù)學(xué)描述和攻擊角度約束下制導(dǎo)律設(shè)計(jì)
圖1中,M、T分別代表導(dǎo)彈和目標(biāo),二維平面內(nèi)導(dǎo)彈-目標(biāo)的相對運(yùn)動學(xué)方程為:
(1)
(2)
(3)
(4)
式中:
Vm、Vt——導(dǎo)彈、目標(biāo)的速度,為常數(shù);
Am、At——導(dǎo)彈、目標(biāo)的法向加速度,垂直于各自的速度方向;
θm、θt——導(dǎo)彈、目標(biāo)的速度方向與X軸夾角,逆時(shí)針為正;
R、q——導(dǎo)彈-目標(biāo)的相對距離、視線角。
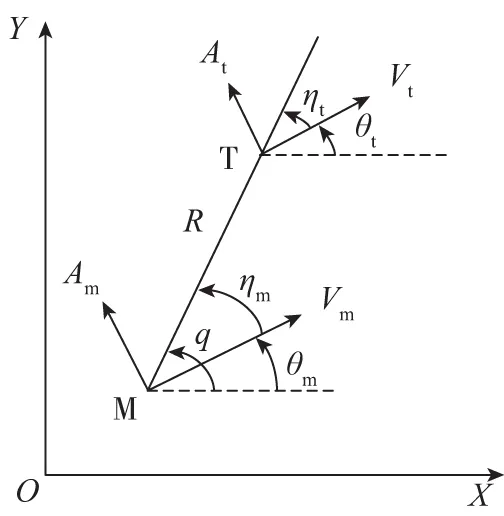
圖1 平面內(nèi)導(dǎo)彈-目標(biāo)的相對運(yùn)動關(guān)系Fig.1 Planar interception geometry
攻擊角度表示為導(dǎo)彈攔截過程中結(jié)束時(shí)刻導(dǎo)彈速度矢量和目標(biāo)速度矢量之間的夾角。定義tf為制導(dǎo)結(jié)束時(shí)刻,導(dǎo)彈期望的攻擊角度設(shè)為Θ,攻擊角度約束的制導(dǎo)問題是指在制導(dǎo)結(jié)束時(shí)刻,導(dǎo)彈保證零脫靶量的同時(shí)能以期望的攻擊角度擊中目標(biāo),即滿足:
(5)
θm(tf)-θt(tf)=Θ
(6)
(7)
式(7)代表導(dǎo)彈擊中目標(biāo)在視場范圍內(nèi),同時(shí)還可以得到
Vtsin(θt(tf)-qd)-Vmsin(θm(tf)-qd)=0
(8)
對于具體攻擊任務(wù)的導(dǎo)彈,期望的攻擊角度Θ是定值,如果目標(biāo)運(yùn)動的速度傾角θt(tf)已知時(shí),則由式(6)可知導(dǎo)彈在制導(dǎo)結(jié)束時(shí)刻的彈道傾角θm(tf)也可以確定,也就是期望的導(dǎo)彈傾角θd。再由式(7)和式(8)可以得到期望終端視線角qd的值。則對于攻擊角度的約束,即求解導(dǎo)彈的彈道傾角滿足θm(t)=θd的問題,可以轉(zhuǎn)化成終端視線角滿足q(t)=qd的問題,這也為后面滑模面的選取奠定了基礎(chǔ)。
目標(biāo)做固定加速度或者隨機(jī)加速度的機(jī)動運(yùn)動時(shí),主要討論下面三種特殊情況,其他的攻擊角度需要綜合式(5)~式(8)分析得出,工程應(yīng)用也比較少。
1)當(dāng)垂直攻擊時(shí)
θd=θt(tf)+Θ
(9)
Θ=±π/2
(10)
(11)
2)當(dāng)迎面攻擊時(shí)
θd-θt(tf)=-π
(12)
qd(t)=θt(tf)-π
(13)
3)當(dāng)追尾攻擊時(shí)
θd-θt(tf)=0
(14)
qd=θt(tf)
(15)
(16)

為保證系統(tǒng)狀態(tài)能夠到達(dá)滑模,且到滑模的過程中有優(yōu)良的動態(tài)特性,構(gòu)造自適應(yīng)趨近律為
(17)

對式(16)求導(dǎo),可得
(18)
將式(17)代入式(18)左端,式(3)、式(4)代入式(18)右端,可以得到變結(jié)構(gòu)制導(dǎo)律為
(19)
(20)
于是得到非線性變結(jié)構(gòu)制導(dǎo)律的表達(dá)式。它需要的變量多,且需要實(shí)時(shí)估計(jì)目標(biāo)的加速度和速度等信息,這給它的實(shí)現(xiàn)帶來一定難度。
2 目標(biāo)加速度的估計(jì)
我們用小角度攝動法來線性化導(dǎo)彈-目標(biāo)相對運(yùn)動學(xué)方程[7-8],最終可以得到
(21)

(22)
(23)

基于線性化的導(dǎo)彈-目標(biāo)相對運(yùn)動學(xué)方程式(23),我們來推導(dǎo)線性變結(jié)構(gòu)制導(dǎo)律。
滑動模態(tài)和趨近律方程與非線性變結(jié)構(gòu)制導(dǎo)律采用的模型相同,分別為式(16)和式(17)。
(24)
在實(shí)際中,干擾f可能無法得到,式(24)可寫為
(25)
(26)
于是制導(dǎo)律可以表示為
(27)
與非線性變結(jié)構(gòu)制導(dǎo)律比較,線性變結(jié)構(gòu)制導(dǎo)律不需要計(jì)算三角函數(shù),所需運(yùn)算量小;它的實(shí)現(xiàn)只需要獲得相對速度和視線角速率2個變量,所需的變量數(shù)目小于非線性變結(jié)構(gòu)制導(dǎo)律;只需要知道目標(biāo)加速度上界,不需要對目標(biāo)加速度進(jìn)行估計(jì)。可見,線性變結(jié)構(gòu)制導(dǎo)律的實(shí)現(xiàn)難度遠(yuǎn)小于非線性變結(jié)構(gòu)制導(dǎo)律,由于q很小,得到
(28)
將式(28)代入式(25),得到
(29)
式(29)與式(27)完全相同。可見,線性變結(jié)構(gòu)制導(dǎo)律獲得的導(dǎo)彈的指令值可以近似看作是對目標(biāo)加速度的估計(jì)值。


(30)
從式(30)和式(29)可以看出線性變結(jié)構(gòu)制導(dǎo)律的工作特點(diǎn)。導(dǎo)彈在飛向目標(biāo)的過程中,可以近似這樣認(rèn)為,實(shí)時(shí)估計(jì)目標(biāo)的加速度,而且將其近似看作導(dǎo)彈的制導(dǎo)指令,引導(dǎo)導(dǎo)彈做與目標(biāo)相同形式的機(jī)動,從而保證視線角速率在攔截過程中為零。
3 仿真實(shí)例
仿真情形1:對機(jī)動目標(biāo)垂直攻擊的情況
對機(jī)動目標(biāo)垂直攻擊的仿真結(jié)果如圖2~圖3。
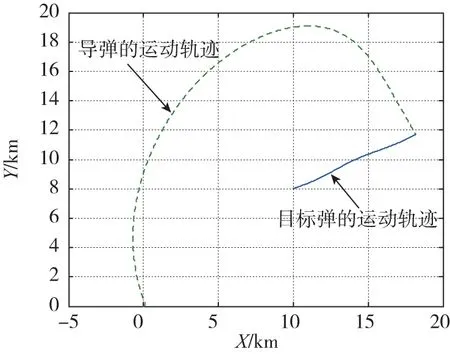
圖2 導(dǎo)彈和目標(biāo)的運(yùn)動軌跡Fig.2 Trajectories of missile and target
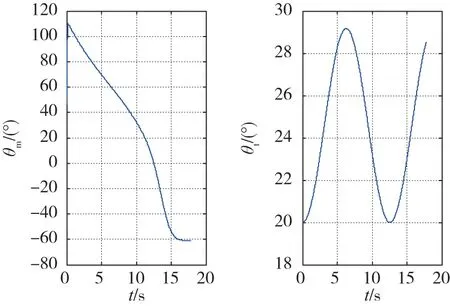
圖3 導(dǎo)彈和目標(biāo)的彈道傾角Fig.3 Trajectory oblique angles of missile and target
當(dāng)目標(biāo)具有正弦機(jī)動的加速度,由仿真結(jié)果可知導(dǎo)彈仍能在脫靶量誤差允許的情況下命中目標(biāo),脫靶量為2.3562m。由已知條件可以得到制導(dǎo)末端結(jié)束時(shí)目標(biāo)的彈道傾角近似為28.75°,已知導(dǎo)彈、目標(biāo)速度的大小Vm、Vt和目標(biāo)的彈道傾角θt的值,根據(jù)式(11),可以得到期望的視線角qd=-75.29°,進(jìn)而可以得到相應(yīng)的變結(jié)構(gòu)制導(dǎo)律,而命中目標(biāo)時(shí)導(dǎo)彈的彈道傾角為 -60.62°,根據(jù)終端攻擊角度的定義,此時(shí)攻擊角度Θ=-89.37°,可以認(rèn)為導(dǎo)彈以垂直的攻擊形式命中目標(biāo)。
仿真情形2:對機(jī)動目標(biāo)尾追攻擊的情況
對機(jī)動目標(biāo)尾追攻擊的仿真結(jié)果如圖4~圖5。
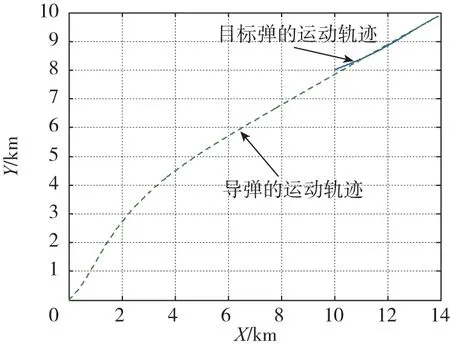
圖4 導(dǎo)彈和目標(biāo)的運(yùn)動軌跡Fig.4 Trajectories of missile and target
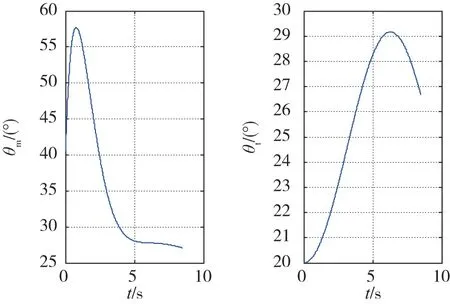
圖5 導(dǎo)彈和目標(biāo)的彈道傾角Fig.5 Trajectory oblique angles of missile and target
當(dāng)目標(biāo)具有正弦機(jī)動的加速度,由仿真結(jié)果可知導(dǎo)彈仍能在脫靶量誤差允許的情況下命中目標(biāo),脫靶量為1.7852m。由已知條件可以得到制導(dǎo)末端結(jié)束時(shí)目標(biāo)的彈道傾角近似為26.31°,已知目標(biāo)的彈道傾角θt,根據(jù)式(15),可以得到期望的視線角qd=θt=26.31°,進(jìn)而得到相應(yīng)的變結(jié)構(gòu)制導(dǎo)律,而制導(dǎo)結(jié)束時(shí)刻導(dǎo)彈的彈道傾角為 27.27°,根據(jù)終端攻擊角度的定義,此時(shí)攻擊角度Θ=0.96°,可以認(rèn)為導(dǎo)彈以追尾攻擊的形式命中目標(biāo)。
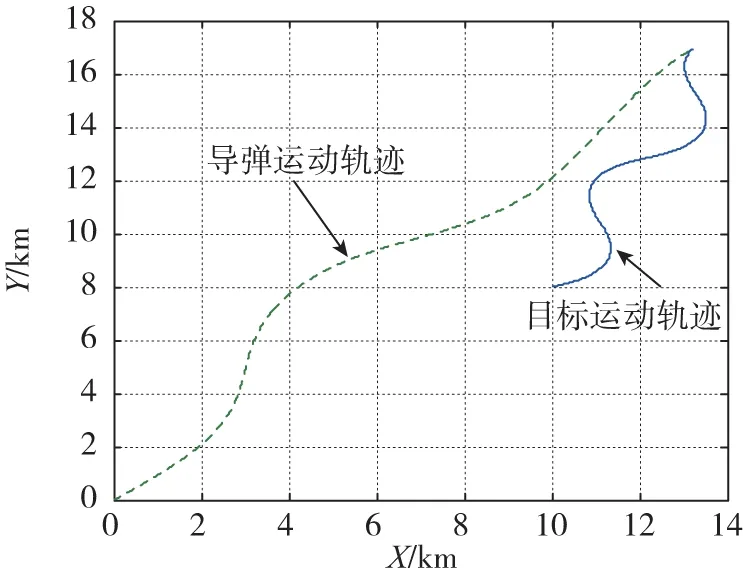
圖6 導(dǎo)彈和目標(biāo)的運(yùn)動軌跡Fig.6 Trajectories of missile and target
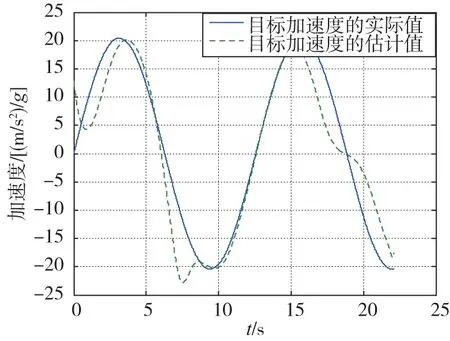
圖7 目標(biāo)加速度的實(shí)際和估計(jì)曲線Fig.7 Actual and estimated curves of target’s acceleration
如圖7所示,用線性變結(jié)構(gòu)制導(dǎo)律方法對目標(biāo)的加速度值進(jìn)行了估計(jì),雖然和實(shí)際值有所差異,但是可以近似認(rèn)為是目標(biāo)機(jī)動的加速度值,應(yīng)用到非線性變結(jié)構(gòu)制導(dǎo)律標(biāo)的法向加速度中,同時(shí)變結(jié)構(gòu)制導(dǎo)律本身具有較強(qiáng)的魯棒性,仿真結(jié)果如圖6所示,導(dǎo)彈仍能命中目標(biāo),脫靶量為1.5338m,在誤差允許的范圍內(nèi),證實(shí)了算法的有效性。
4 結(jié)論
本文基于變結(jié)構(gòu)理論,通過對建立的導(dǎo)彈末制導(dǎo)的二維數(shù)學(xué)模型進(jìn)行分析,設(shè)計(jì)了攻擊角度約束下打擊機(jī)動目標(biāo)的制導(dǎo)律,所設(shè)計(jì)的制導(dǎo)律能夠以期望的攻擊角度擊中目標(biāo),對機(jī)動目標(biāo)有較強(qiáng)的魯棒性。由于設(shè)計(jì)的制導(dǎo)律還依賴目標(biāo)的加速度,本文應(yīng)用線性化后的變結(jié)構(gòu)制導(dǎo)律對目標(biāo)的加速度進(jìn)行了估計(jì),并通過仿真證實(shí)了算法的可行性。所設(shè)計(jì)的制導(dǎo)律具有所需參量易于獲取、制導(dǎo)精度高、魯棒性強(qiáng)等優(yōu)點(diǎn),因此便于在工程中推廣應(yīng)用。
[1] Kim M, Grider K V. Terminal guidance for impact attitude angle constrained flight trajectories [J]. IEEE Transaction on Aerospace and Electronic System, 1973, 9 (6): 852-859.
[2] Song T L, Shin S J, Cho H. Impact angle control for planar engagements [J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35 (4): 1439-1444.
[3] Kim B S, Lee J G. Homing guidance with terminal angular constraint against non-maneuvering and maneuvering target [J]. AIAA-97-3474(S0731-5090): 189-199.
[4] Zhou D, Mu C, Ling Q, et al. Optimal sliding-mode guidance of a homing-missile [C]. Proceedings of IEEE Conference on Decision and Control, 1999: 5131-5136.
[5] Zhou D, Mu C, Xu W. Adaptive sliding-mode guidance of a homing missile [J]. Journal of Guidance, Control and Dynamics, 1999, 22 (4): 589-594.
[6] 王華吉,簡金蕾,雷虎民,等. 攔截機(jī)動目標(biāo)的模糊變結(jié)構(gòu)導(dǎo)引律 [J]. 電光與控制,2014, 21 (10): 42-46.
[7] 周荻.尋的導(dǎo)彈新型導(dǎo)引規(guī)律 [M]. 北京:國防工業(yè)出版社,2002: 8-26.
[8] 高為炳.變結(jié)構(gòu)控制理論基礎(chǔ) [M]. 北京:中國科學(xué)技術(shù)出版社,1990.
Guidance Law with Attack Angle Constraints for Maneuvering Targets
WANG Jian, CUI Wen-hao, SHI Zhen, CHI Xiao-hui
(College of Automation, Harbin Engineering University, Harbin 150001, China)
Some missiles with terminal attack angle constraints were required in the war, a guidance law based on the sliding mode variable structure control theory with miss distance and attack angle constraints was proposed for maneuvering targets. The target maneuvering was taken as a disturbance and an adaptive sliding mode approaching law was adopted, what’s more, the estimated equation of the target acceleration is deduced based on the linear variable structure guidance law,the simulation result demonstrates the estimated value. The obtained guidance law was simple and practical. The simulation shows that the guidance law can be used to ensure the missiles hit the maneuvering targets with the desirable attack angle, and the performances of the proposed guidance law were analyzed, the research can offer some references for engineering application.
Terminal attack angle constraints; Variable structure control; Estimated equation of the target acceleration;Miss distance; Guidance law
10.19306/j.cnki.2095-8110.2016.05.010
2015-04-21;
2015-07-09。
王健(1988-),男,碩士,研究方向?yàn)閷?dǎo)彈的制導(dǎo)與控制。E-mail:wangjian411@hrbeu.edu.cn
TJ765.3
A
2095-8110(2016)05-0051-05
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學(xué)生數(shù)理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
