ADOP可觀測性分析方法在旋轉式慣導初始對準中的應用
2016-03-16 07:43:22胡華峰
導航定位與授時 2016年5期
關鍵詞:系統
胡華峰, 劉 明, 李 旦, 羅 偉
(湖北航天技術研究院總體設計所,武漢 430040)
ADOP可觀測性分析方法在旋轉式慣導初始對準中的應用
胡華峰, 劉 明, 李 旦, 羅 偉
(湖北航天技術研究院總體設計所,武漢 430040)
針對旋轉式慣導系統多位置初始對準可觀測性的問題,對可應用于初始對準方案選擇的姿態精度因子(ADOP)可觀測性分析方法進行了研究。以慣導初始對準33維狀態誤差方程為研究對象,分析ADOP方法在旋轉式慣導初始對準的轉動順序、停留時間及模型降階方面的應用。理論分析和仿真結果均表明該方法控制靈活、直觀有效,能夠為旋轉式慣導初始對準應用中最佳方案選擇提供依據。
ADOP;可觀測性;旋轉式慣導系統;初始對準
0 引言
慣性導航系統(Inertial Navigation System,INS)中一個十分重要的問題就是其初始對準問題。實踐證明應用卡爾曼濾波器實現INS的初始對準具有較好的效果。卡爾曼濾波器對系統狀態估計的收斂速度和精度決定著系統初始對準的速度和精度,而這在很大程度上是由系統的可觀測性所決定的。因此,在設計卡爾曼濾波器之前想要研究系統狀態的可估計性和初始對準的速度和精度,必須首先分析系統狀態的可觀測性[1-2]。
為了實現慣導系統快速精確對準,有效改善系統的可觀測性,J.G.Lee和C.G.Park等研究發現,等效地轉動慣性測量單元(IMU)能夠巧妙地變換導航系統誤差模型中的系統矩陣,從而改善導航系統的可觀測性,實現快速精確對準[3]。因此,對于具有旋轉功能的慣導系統,弄清轉動對系統可觀測性和可觀測度的影響,發現最優的對準方案,對提高捷聯慣性系統初始對準的速度和精度具有重要的意義。
目前,常用的可觀測性和可觀測度分析方法很多,但都是優缺點并存[4-6]。實際應用中,應根據需要選擇合適的分析方法,Carl Johnson提出一種姿態精度因子(Attitude Dilution of Precision,ADOP)方法來分析狀態變量的可觀測度,這種方法生成的ADOP圖形象直觀,而且可以用來設計特定的軌跡以增強狀態的可觀測度[7-8]。本文在充分分析ADOP可觀測性分析方法的基礎上,介紹了如何利用ADOP方法確定初始對準中的旋轉方案及系統模型的降階。
1 ADOP可觀測性分析法
1.1 ADOP可觀測性分析
xn=Φn,n-1xn-1+wn-1
(1)
其中,wn是白噪聲序列,其協方差陣為Qn。
這里n時刻的狀態量還可以表達如下
xn=Φn,0x0+an-1
(2)
其中
an-1=wn-1+Φn,n-1wn-2+Φn,n-2wn-3+…+
Φn,2w1+Φn,1w0
量測序列為
zn=Hnxn+vn
(3)
其中,vn是量測噪聲,Hn為n時刻的量測矩陣。
將式(2)帶入式(3),則量測序列寫為如下形式
zn=Hn(Φn,0x0+an-1)+vn
=HnΦn,0x0+un
(4)
其中:
un=Hnan-1+vn
(5)
注意,a與v是不相關的。
定義:
(6)
有
Z=Hx0+U
(7)
定義協方差陣如下:
(8)
由于a與v不相關,所以由式(5)和式(8)得
(9)
又有an=wn+Φn+1,nan-1,且an-1與wn不相關,所以
(10)
又有

(11)
R =cov(U)
=diag(R1,R2,…,RN)
(12)
實際應用中,考慮與量測量相關的狀態所對應的系統噪聲項較小(如加速度計隨機游走),式(11)計算值的量級小于Rn,因此可以忽略R矩陣非對角塊的值,即式(12)成立。
因此,上述問題轉換為一個典型的最小二乘問題,根據給定的量測值Z和噪聲項U估計系統狀態x0。
加權最小二乘估計的指標是[7]
=min
(13)
其解為
(14)
(15)
將式(6)和式(12)代入式(14),可以獲得如下關系式
P=(HTR-1H)-1
(16)
其中,n表示第n次量測。
如果要研究最優估計時每個狀態變量的可觀測性,取P的每個對角線元素作為對應狀態可觀測性的度量,由于P的對角線元素描述了對應狀態的誤差方差,所以P的對角線元素值收斂的越小,代表對應狀態變量的可觀測性越高。

(17)
因此,可以加入一個量測方程
(18)
將式(18)與式(7)組合成為一個新的最小二乘問題,即:
(19)
因此,由馬爾可夫估計的均方誤差可知狀態變量的協方差矩陣可以表示為
(20)
1.2 P陣規范化
如果直接計算P陣,給出各個狀態的收斂大小,不進行規范化處理,那么各狀態的取值范圍可以是任意的,使得各個狀態之間不具有可比性,不能有效判斷各個狀態的收斂程度,因此,有必要對P陣進行規范化處理[9]。
通常,在進行卡爾曼濾波之前都要設定P0,在此認為P0是確切已知且為對角陣。利用P0將P全等變換為P′,變換等式如式(21)所示
(21)

2 基于ADOP的轉動方案選擇
下面將介紹如何利用ADOP方法來確定地面初始對準的方案。
2.1 系統說明
理論研究表明,當IMU繞方位軸從初始位置旋轉180°到第2位置時,等效東向和北向陀螺漂移的符號由正變負,若在2個位置停留時間相同則可以抵消2個陀螺儀的常值漂移誤差,從而提高方位失準角的精度。因此優先考慮繞方位軸(本文約定為Z軸)轉動的方案。
另外,在繞方位軸旋轉的基礎上,繞另外任意一軸旋轉90°,可以有效提高方位陀螺漂移的估計精度,因此,為了對比,將這種組合方案作為待選轉動方案。另外,選擇靜止不動作為參考方案進行對比。
因此,總結上述方案如表1所示(初始時刻XYZ的指向為北東地)。
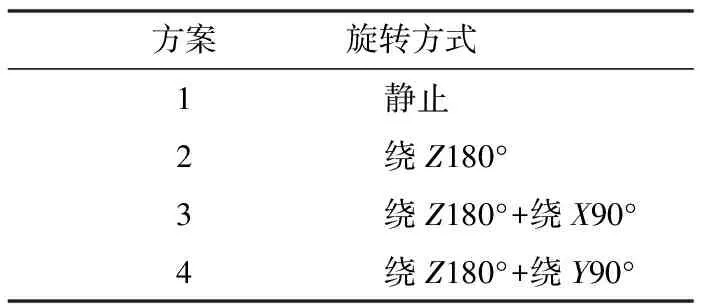
表1 轉動方案
慣導系統誤差模型設定為33維,包含6個系統狀態(速度、姿態各三維),15個加速度計狀態及12個陀螺狀態,詳細方程可參考P.G.Savage的書[10]。加速度計零偏30μg,標度因數誤差1×10-4,失準角誤差100μrad,二次項系數誤差3×10-6/g;陀螺零偏差0.01(°)/h,標度因數誤差3×10-5,失準角誤差100μrad。
2.2 最優轉動順序
目前,加速度計的水平已經達到很高的精度,慣導系統的水平對準精度已經能夠滿足用戶需要,因此本文以考察初始對準的方位對準精度為目標,設對準時間為5min,轉動速度為9(°)/s,則仿真計算得各轉動方案的方位對準精度結果如表2所示。

表2 各轉動方案的方位對準精度
從表2數據可以看出,繞Z轉動的方式為最優方式,5min的方位對準精度為0.462′;繞Z軸和X軸的組合方式效果最差,繞Z軸和Y軸的組合方式效果居中,主要是在繞Y軸的轉動過程中,該軸保持不動,保證了繞Z軸轉動的方位對準精度。需要強調的是此處僅以方位誤差的大小衡量效果的好壞。
由于篇幅所限,此處僅列出方案2姿態誤差的曲線圖,如圖1所示。
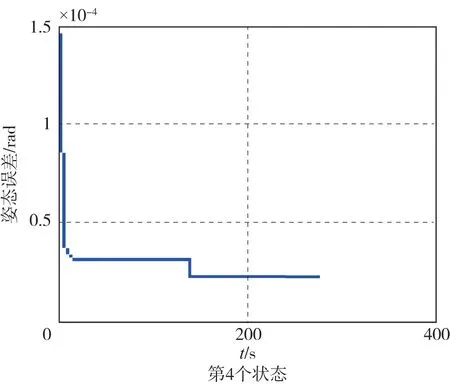
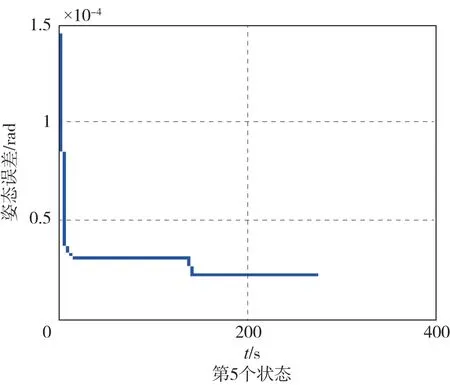
圖1 方案2姿態誤差曲線圖Fig.1 Attitude error of scheme 2
圖1中第4、5、6狀態分別為東向、北向和天向姿態誤差。從圖1中可以看,在沒有轉動時水平姿態誤差也能較快地收斂到一定程度,而方位收斂較慢,且一定時間后保持在一定水平上;在轉動之后,水平姿態和方位均能有效收斂到更高,增強了各個系統的可觀測度。
2.3 最優時間分配
從2.2節的分析可知,繞Z軸轉動的方案為較優轉動方案。但是上述分析的過程中,是將整個對準時間平均分配在各個停止段,理論證明基于轉動方式的初始對準方案,只需要在對稱位置上停留相同時間即可,因此,有必要驗證轉動過程中最后一個位置停留時間長短對方位對準精度的影響。具體時間分配及計算結果如表3所示。

表3 不同轉動時間分配的方位對準精度
從表3可以看出,對于轉動方案2,時間分配為[140 140]時最優。
3 基于ADOP的模型降階
利用ADOP可觀測性分析方法進行模型降階,就是尋求可觀測度高的狀態分量,將這些狀態保留,刪除其他狀態量,獲得低階的對準模型從而降低運算量。
由上述分析可知,基于ADOP的可觀測性分析方法可以直觀地描述各狀態分量本身的收斂情況,然而為有效地比較各狀態分量之間的收斂程度大小,需要進行歸一化。對時間分配為[140 140]的轉動方案進行歸一化處理后的結果如圖2所示。
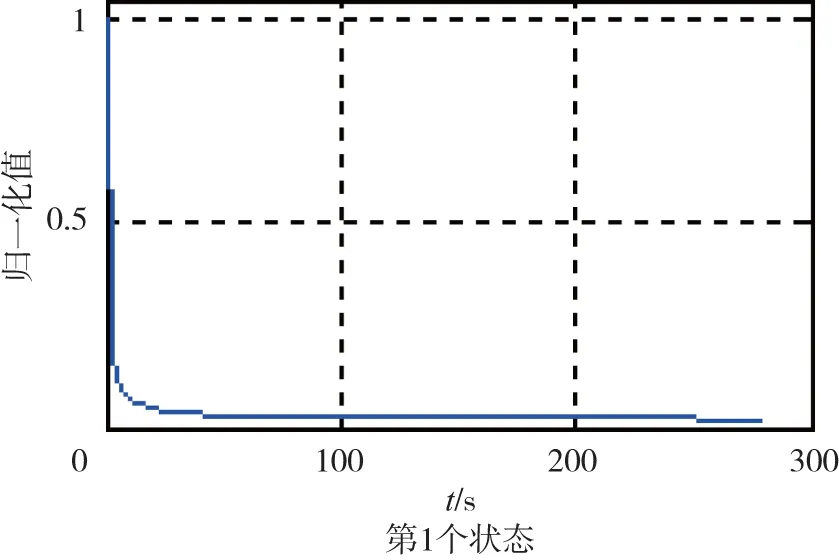
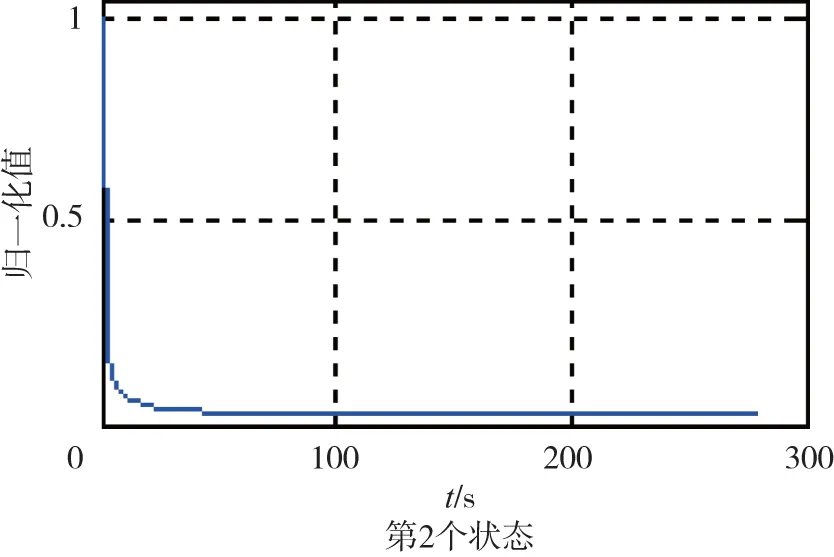
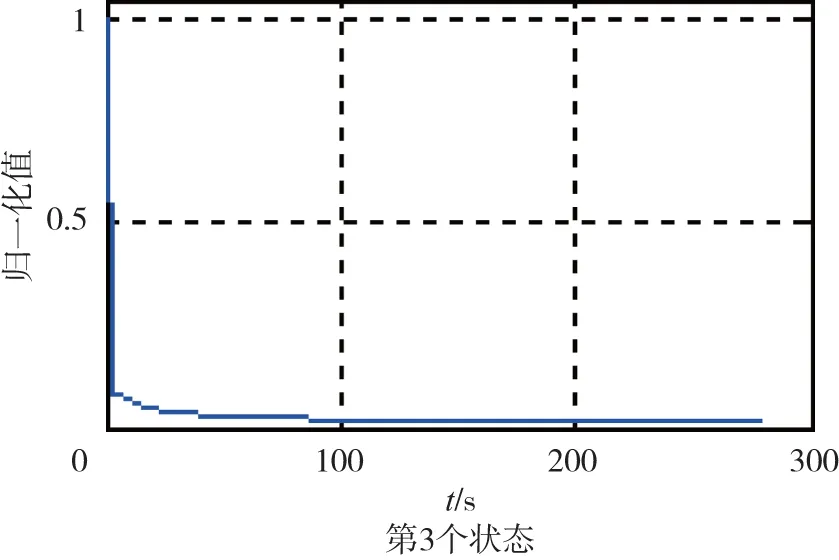
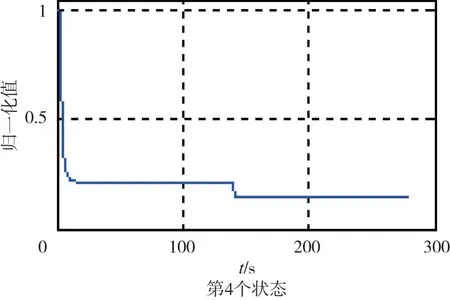
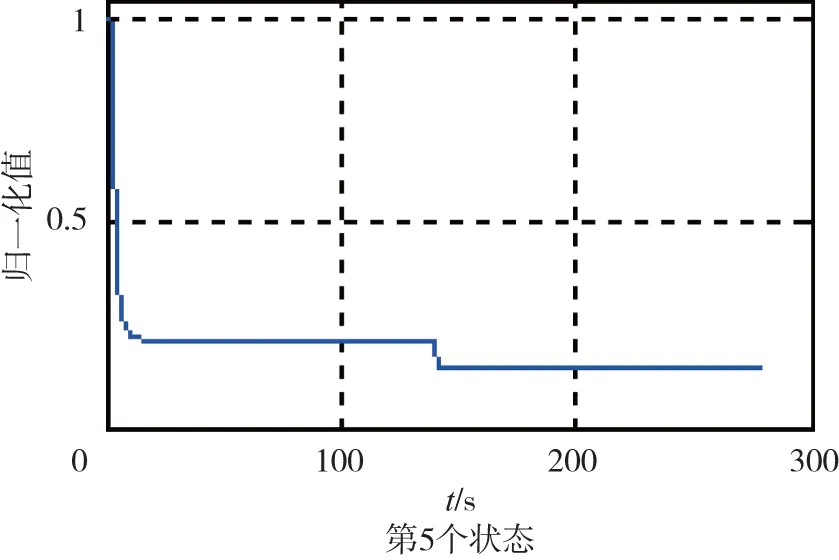
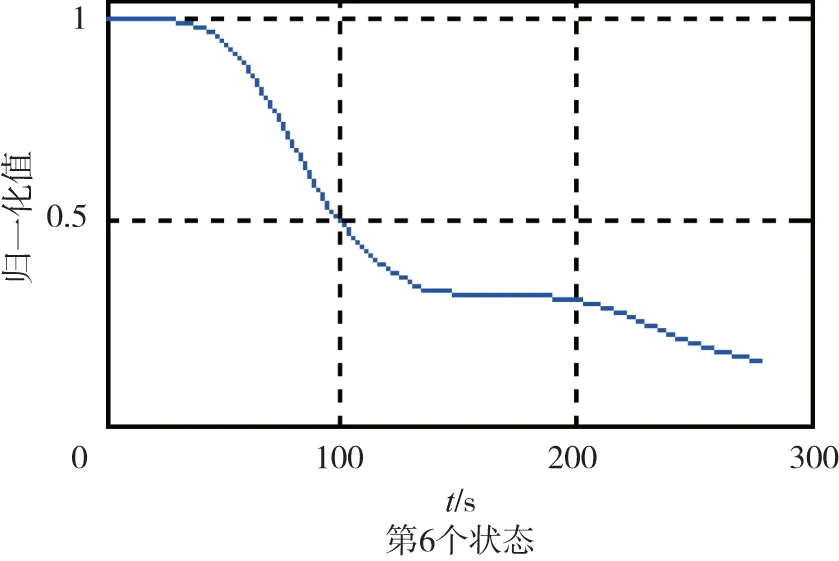
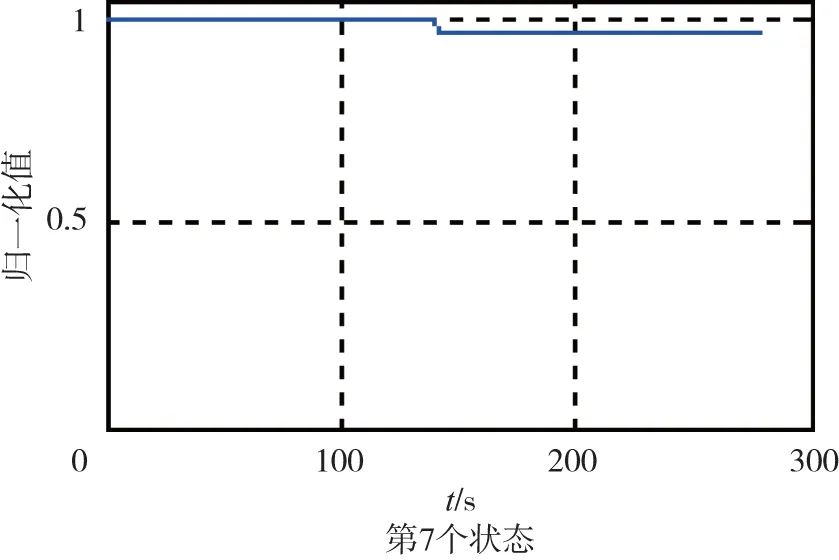
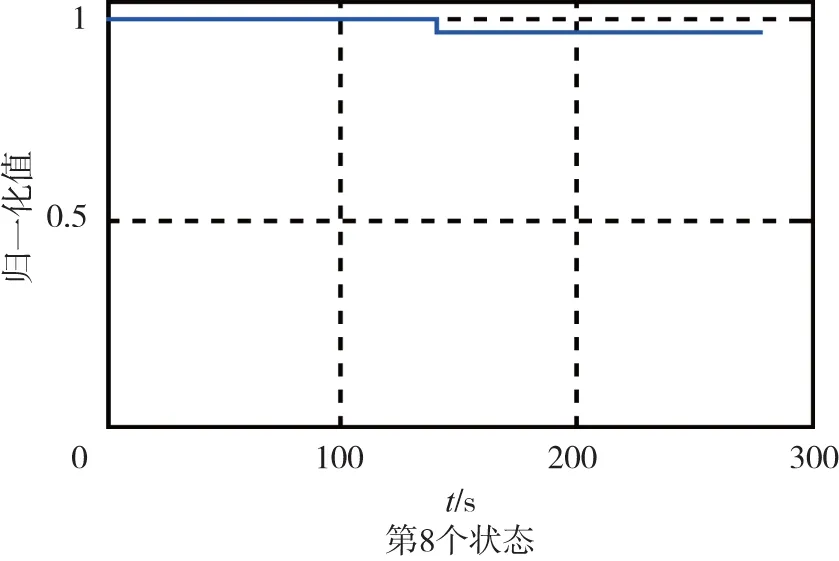
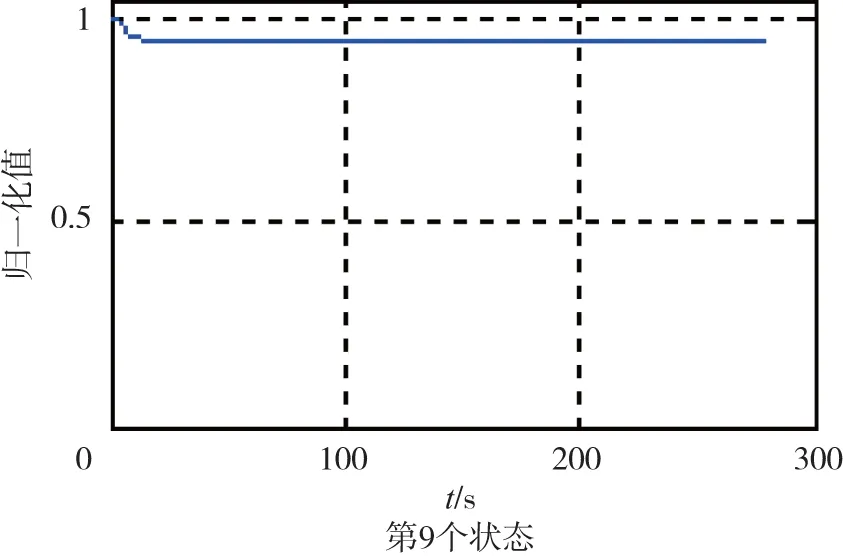
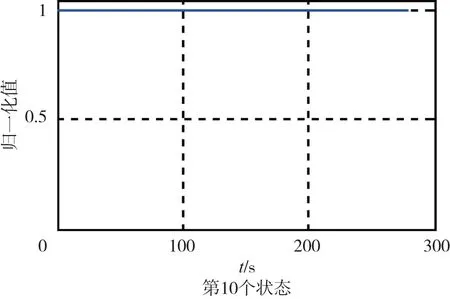
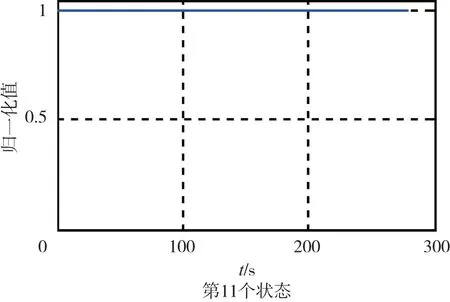
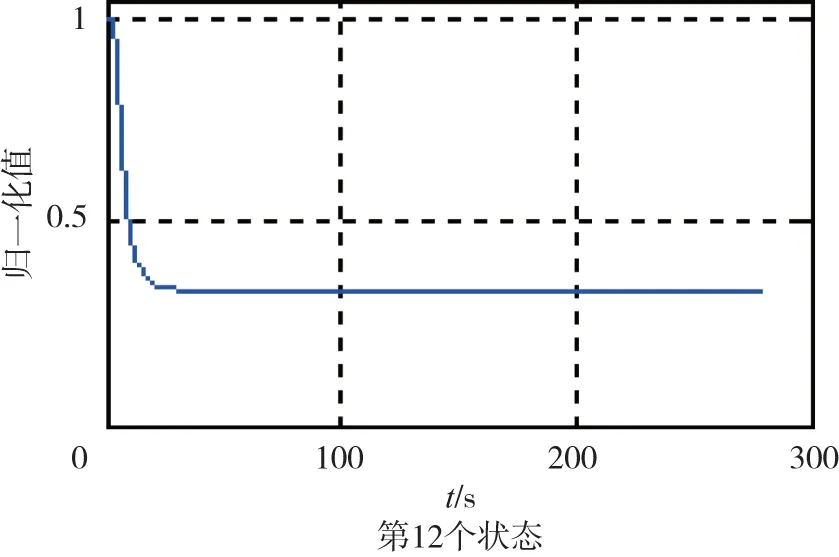
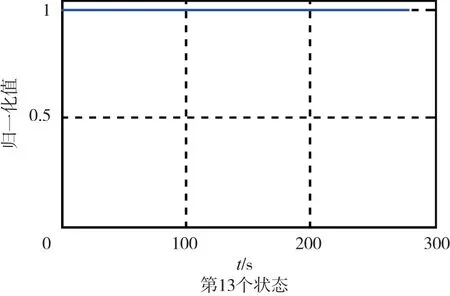
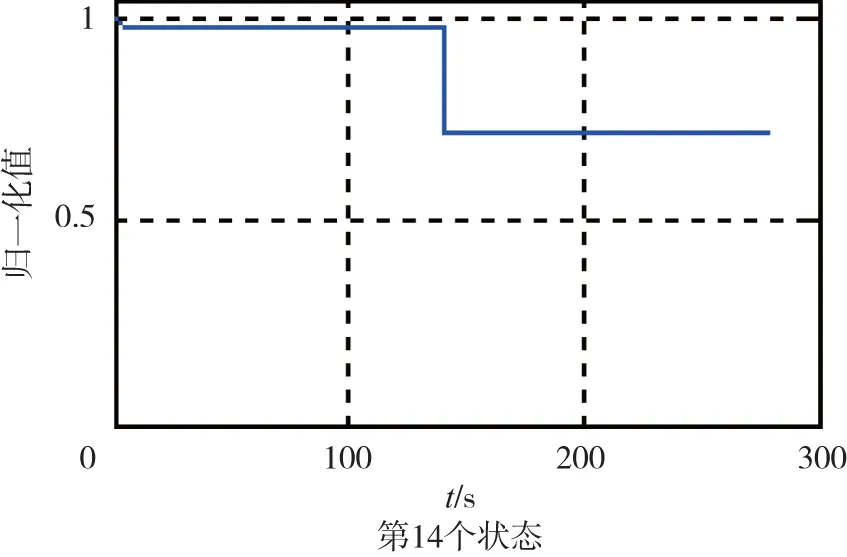
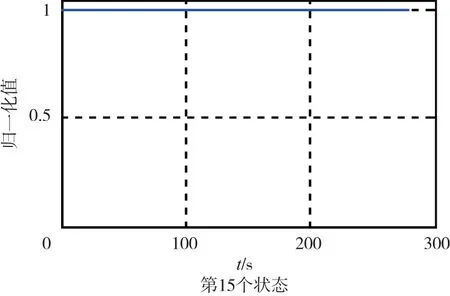
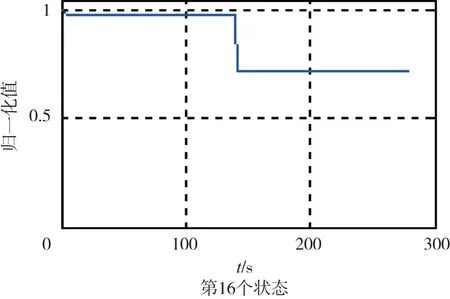
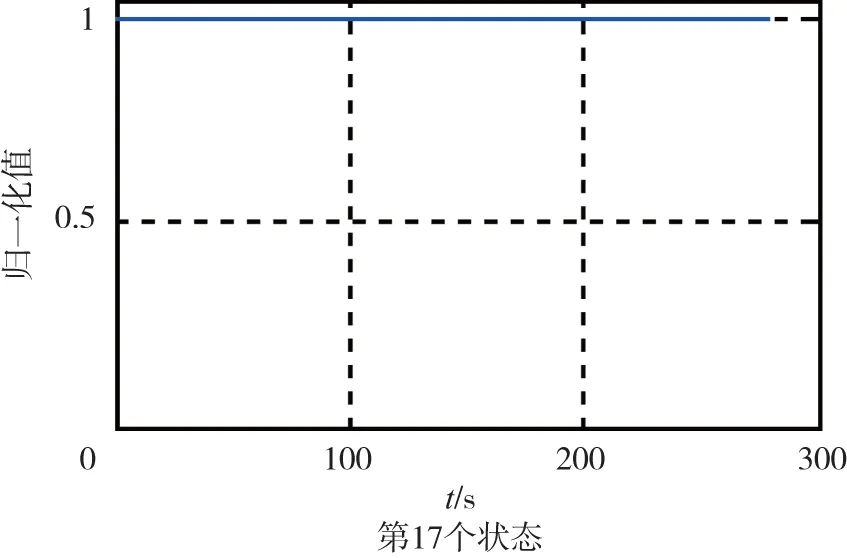
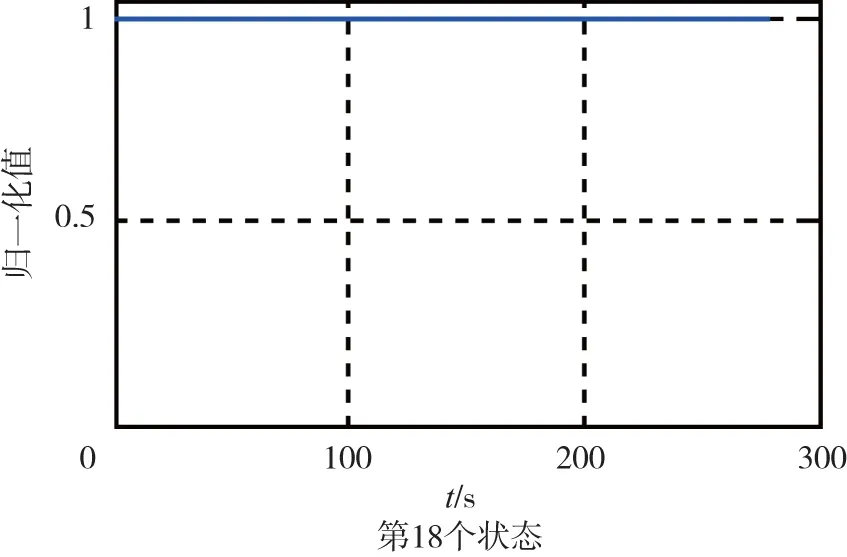
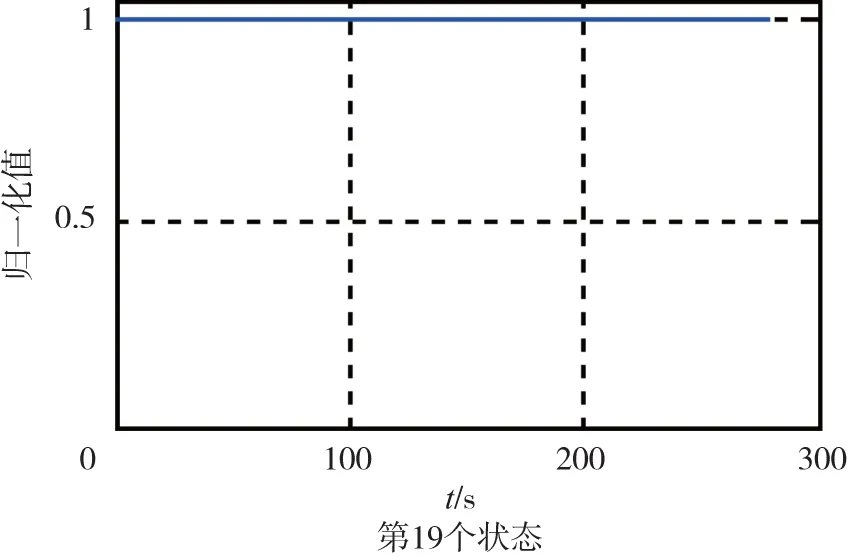
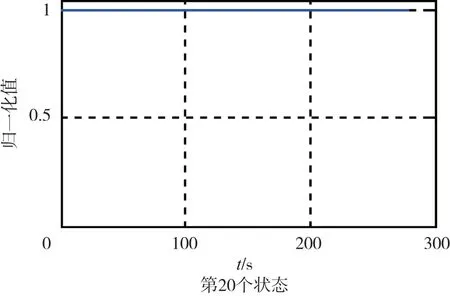
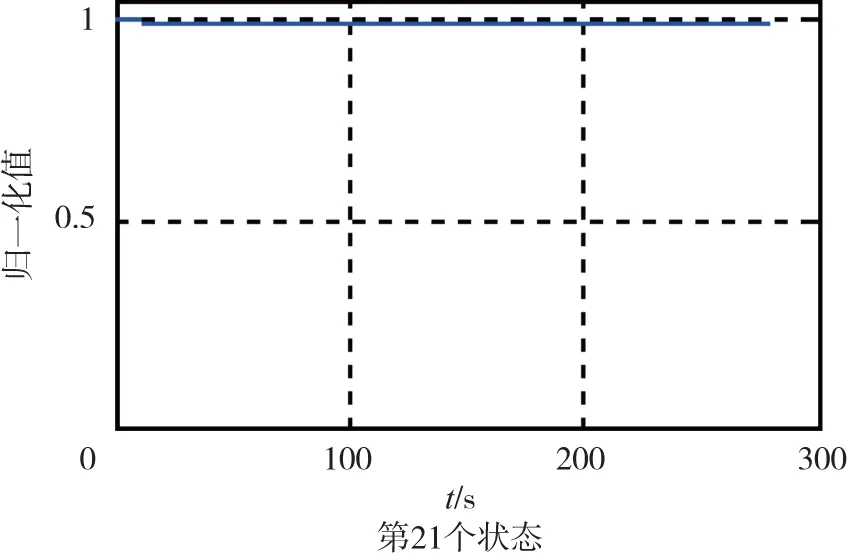

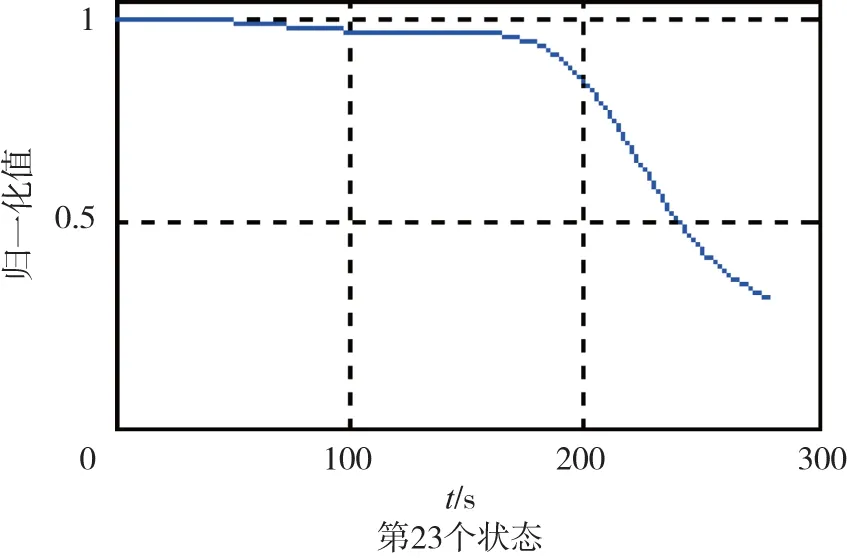
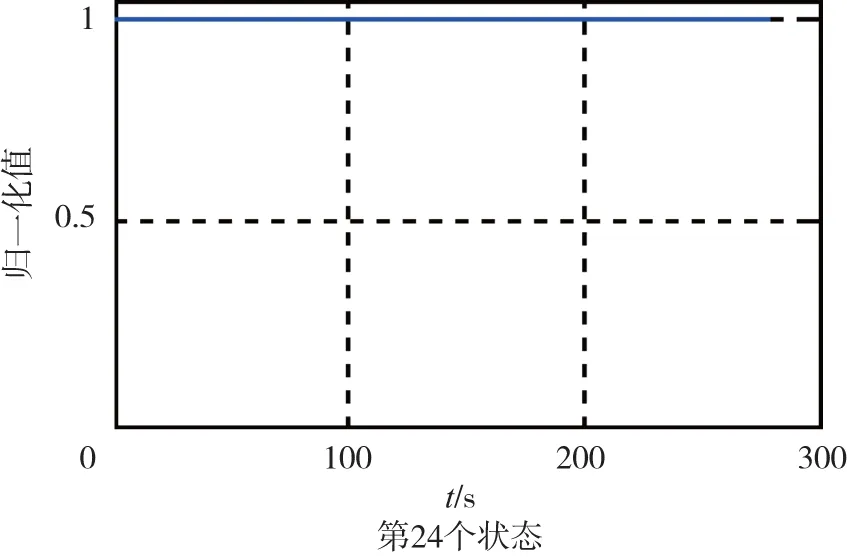
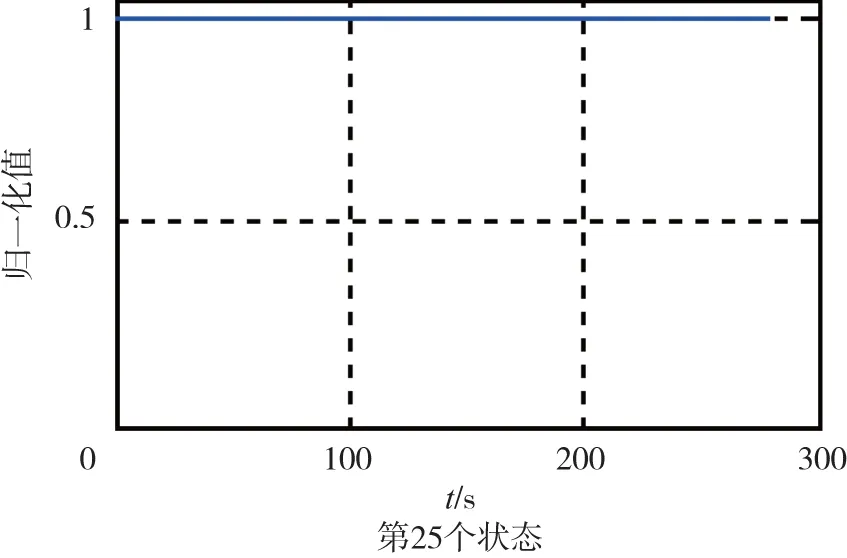
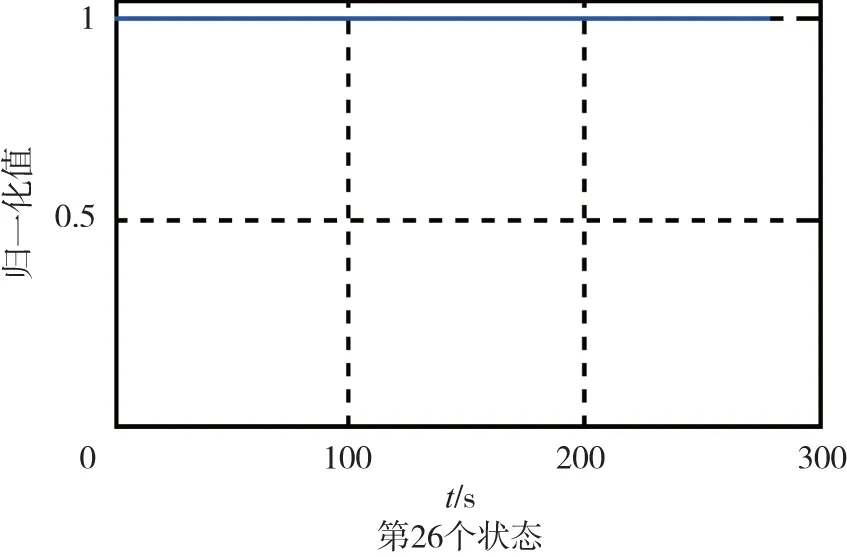

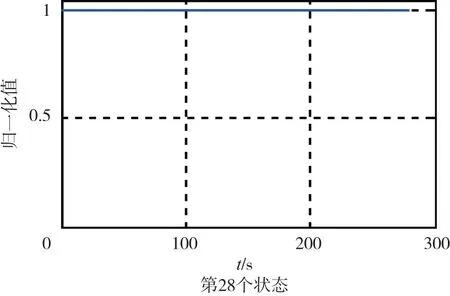
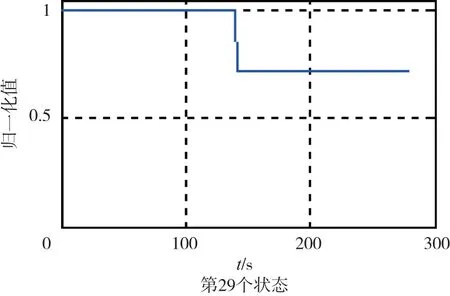

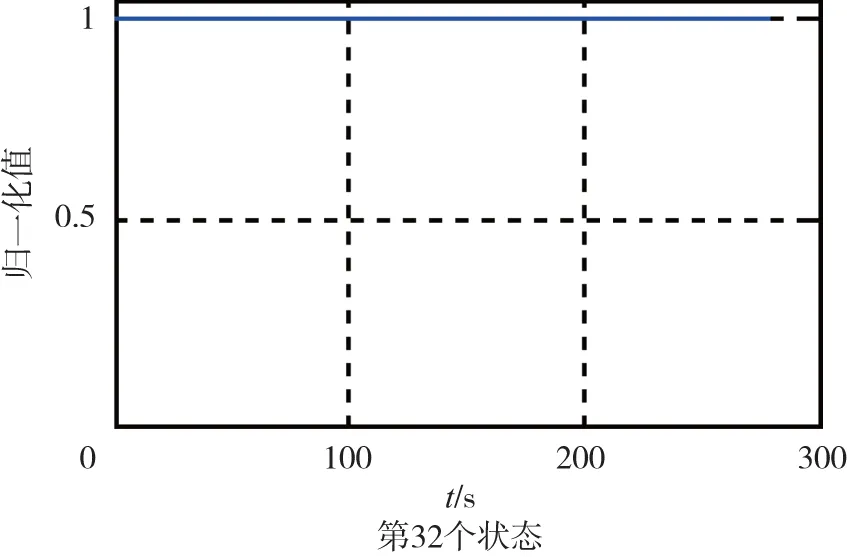
圖2 ADOP歸一化后的結果Fig.2 The result of ADOP with normalization
從圖2中可以看出,可觀測性較高的狀態有6維系統狀態(1~6),Z加速度計標度因數誤差(12)、X陀螺零偏誤差(22)、Y陀螺零偏誤差(23),另外,3個加速度計零偏誤差(7~9),X加速度計相對Z軸失準角誤差(14)、Y加速度計相對Z軸失準角誤差(16)、X陀螺相對Z軸失準角誤差(29)、Y陀螺相對Z軸失準角誤差(31)也具有一定的可觀測性,上述狀態共16維狀態。
4 結論
本文針對地面慣性導航系統初始對準的實際需求,在詳細分析基于姿態精度因子可觀測性和可觀測度的基礎上,以最終方位對準精度為目標,提出了利用ADOP輔助確定IMU轉動方案(特別是在確定各轉動位置時間分配上)的分析方法,同時給出了利用ADOP可觀測性分析方法進行模型降階的具體實現。本文所述方法為工程實際應用提供了依據,奠定了基礎。
[1] 王榮穎,許江寧,卞鴻巍. 基于可觀測性分析的方位旋轉式慣導初始對準仿真研究[J]. 中國慣性技術學報, 2009, 17(1) : 16-19.
[2] 楊曉霞,陰玉梅. 可觀測度的探討及其在捷聯慣導系統可觀測性分析中的應用[J]. 中國慣性技術學報, 2012, 20(4) : 405-409.
[3] 王新龍. 捷聯式慣導系統動、靜基座初始對準[M]. 西安:西北工業大學出版社, 2013.
[4] 付夢印,鄭辛,鄧志紅. 傳遞對準理論與應用[M]. 北京:科學出版社, 2012.
[5] Song L, Zhang C, Lu J. Self alignment of full skewed RSINS observability analysis and full observable Kalman filter[J]. Journal of Systems Engineering and Electronics, 2014, 25(1):104-114.
[6] 趙琳,李亮,孫明. 基于SVD的SINS多位置對準可觀測性分析[J]. 中國慣性技術學報, 2008, 16(5) : 523-528.
[7] Johnson C,Ohlmeyer E J,Pepitone T R. Attitude dilution of precision-a new metric for observability of inflight alignment errors[C].AIAA Guidance, Navigation, and Control Conference and Exhibit, 2000.
[8] Ohlmeyer E J,Hanger D B,Pepitone T R. In-flight alignment techniques for navy theater wide missiles[C]. AIAA Guidance, Navigation, and Control Conference and Exhibit, 2001.
[9] Ham F M,Brown R G. Observability, eigenvalues, and Kalman filtering[J]. IEEE Transactions on Aerospace and Electronic Systems, 1983,19(2):269-273.
[10] Savage P G. Strapdown analytics[M]. Strapdown Associates, 2000.
The Application of ADOP Observability Analysis Method in Rotating-INS Initial Alignment
HU Hua-feng, LIU Ming, LI Dan, LUO Wei
(Designing Institute of Hubei Aerospace Technology Academy, Wuhan 430040, China)
To study the observability of rotating inertial navigation system(INS)’s multi-position initial alignment, the ADOP (Attitude Dilution of Precision) observability analysis methods are discussed in this paper. In order to research the application of ADOP for the best rotation sequence, the best state duration and reduce model order in rotating-INS’s multi-position initial alignment, the 33-state error model of the INS is taken as its study object. The simulation of initial alignment observability is carried out, the results of theoretical analysis and simulation both show that the method proposed in this paper is intuitive, effective and easy to control, and able to provide the basis for optimal scheme selection.
ADOP; Observability; Rotating inertial navigation system; Initial alignment
10.19306/j.cnki.2095-8110.2016.05.007
2015-06-15;
2015-07-06。
胡華峰(1986-),男,工程師,主要從事慣性技術研究。E-mail:h-hfeng@163.com
V249.32+2
A
2095-8110(2016)05-0033-08
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
