MotionView及HyperStudy在全地形車前懸架設計中的應用
2016-03-15 12:33:08常立曄李成
計算機輔助工程 2016年1期
常立曄 李成
摘要:為解決全地形車大行程前懸架的懸架跳動與前束角變化的協調問題,研究一款全地形車前懸架的運動學模型.在MotionView中建立該全地形車前懸架的運動學模型,借助HyperStudy對懸架跳動與前束角變化關系曲線進行優(yōu)化,獲得與理想曲線較接近的結果.
關鍵詞:全地形車; 懸架跳動; 前束角變化; 雙橫臂懸架; 試驗設計
中圖分類號: U461.6 文獻標志碼:B
Abstract:To solve the coordination problem between the largestroke front suspension bump and the toein angle variation of all terrain vehicle, the kinematics model of the front suspension of an all terrain vehicle is researched. The kinematics model of the front suspension of the all terrain vehicle is built in MotionView, and the relation curve between suspension bump and toein angle is optimized by HyperStudy, which is consistent with the ideal curve.
Key words:all terrain vehicle; suspension bump; toein angle variation; double wishbone suspension; design of experiment
0 引 言
近年來,隨著人與環(huán)境互動的發(fā)展以及農業(yè)、娛樂和越野運輸等需求的增加,全地形車的開發(fā)和制造發(fā)展迅速.憑借4只寬大的越野低壓車胎,加上四輪獨立懸架系統(tǒng),全地形車自由穿梭在最難走行的沙灘或荒漠,載人、載物甚至野地救援都非常合適.這種體形小巧、越野性能強、機動性高的四輪汽車在某些時候甚至比性能強悍的SUV四輪越野汽車更具機動性能.全地形車的軍用潛力也已經被越來越多的軍隊所認識;其家族龐大,而且型號繁多.[12]2款經典的小排量全地形車見圖1.
然而,這種輕型全地形車的底盤懸架幾何設計要求比量產汽車還要精準,懸架行程約150 mm,傳動軸側移可達7~8 mm,若沒有可靠的仿真分析,很難確保行車安全.
目前,在懸架設計方面,清華大學的王磊等
[3]對全地形車中、后橋雙橫臂平衡懸架的設計問題進行研究,并對惡劣路況下三軸全地形車中、后橋垂直載荷進行合理分配.天津大學的馮仁川[4]用Adams對UTV的前懸架進行優(yōu)化設計,并對整車穩(wěn)態(tài)轉向特性進行研究.本文則用多體動力學仿真分析軟件MotionView對全地形車前懸架進行研究.
為分析自制全地形車前懸架的性能及其對操縱穩(wěn)定性的影響,在MotionView中建立該懸架的動力學模型并進行仿真分析,同時利用HyperStudy中的DOE和Optimizaiton模塊進行優(yōu)化設計.通過優(yōu)化對比調整前懸架的參數得到理想的Bumpsteering特性以及良好的高速操控性.
MotionView中帶有多種型式的整車前后懸架模型,能夠快速建造高精度的參數化汽車模型,主要用于對轎車的動態(tài)仿真分析.HyperStudy能與MotionView無縫銜接對仿真進行試驗設計及優(yōu)化分析,使用戶可以更精確地對設計進行量化研究.應用HyperStudy可以很方便地進行一系列的仿真試驗,從而精確地預測所設計的復雜機械系統(tǒng)在各種工作條件下的性能并提供專業(yè)的試驗統(tǒng)計結果.[5]
1 前懸架模型的建立和仿真分析
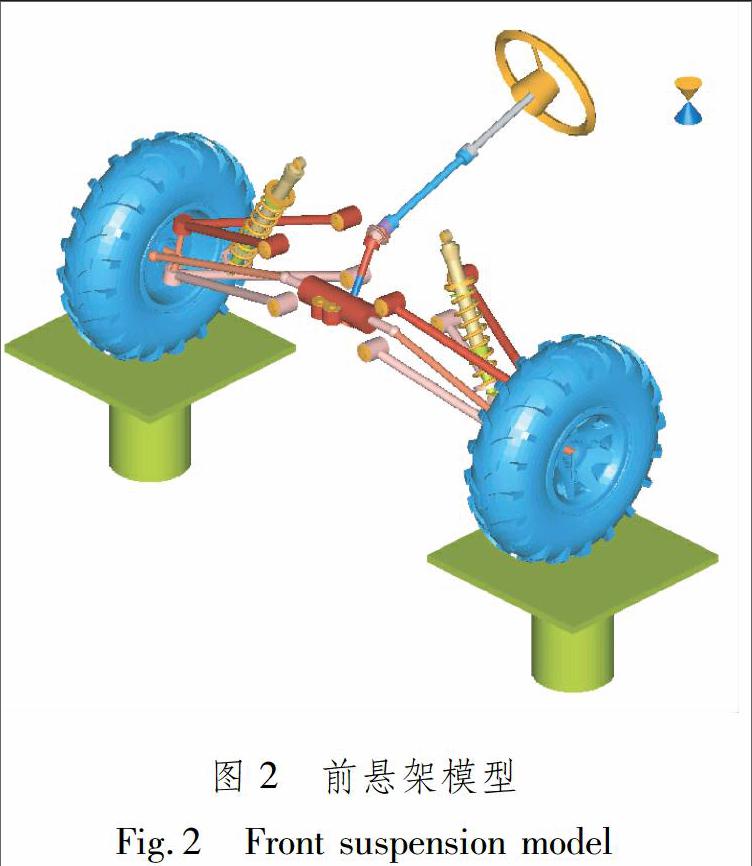
模型硬點的空間位置坐標和相關參數是建立
MotionView動力學模型的關鍵.首先,根據既定參數在MotionView中搭建全地形車的前懸架動力學模型并仿真,確定所有的連接硬點(也就是常說的球銷和襯套連接點).建立的前懸架模型見圖2.
懸架在跳動過程中轉向輪定位參數發(fā)生變化的規(guī)律稱為懸架的運動學特性.車輪定位參數中前輪外傾角、前輪前束角、主銷內傾角和主銷后傾角對汽車的操縱穩(wěn)定性影響較大.[67]為反映前輪定位參數隨車輪跳動的變化規(guī)律,在MotionView中進行雙側車輪平行跳動仿真,全地形車設計跳動范圍為上跳180 mm、下跳90 mm,分析前輪前束角的變化規(guī)律.由于汽車的對稱性,左右車輪定位參數相同,故僅分析左輪定位參數.
通過對比前輪定位參數在橫坐標為0時的值與在數值模擬中測量的值是否一致,判斷所建模型的正確性,確保仿真結果的可信度.
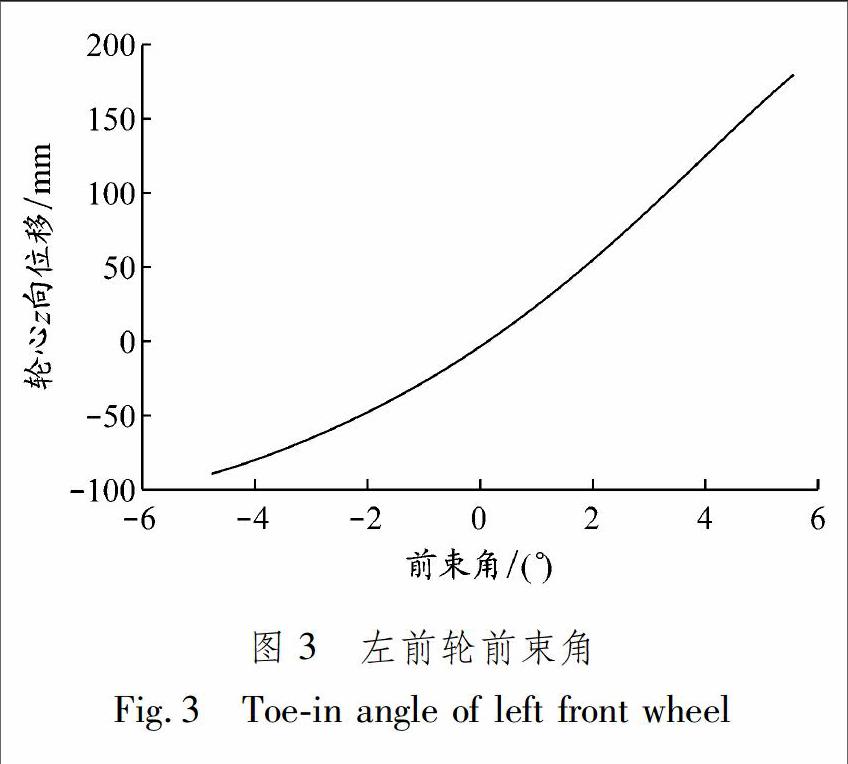
在整車運動過程中,輪胎與車身之間的相對位置會發(fā)生變化,造成前輪定位參數發(fā)生相應變動.車輪定位參數的變化量不能太大,否則將會加劇輪胎和轉向機構的磨損并降低整車操縱穩(wěn)定性和其他相關性能.[812]輪胎上下跳動時對應的前束角的變化稱為BumpSteering特性.當車輛行駛時,如果BumpSteering變化太大將會影響車輛的直線行駛穩(wěn)定性,最高車速也會受到影響,同時增大輪胎與地面間的滾動阻力,加劇輪胎的磨損.所以,在懸架系統(tǒng)設計中BumpSteering是非常重要的指標,原則是變化量越小越好.原始設計的BumpSteering規(guī)律見圖3.前輪前束角變化較大:在-90~180 mm的輪跳范圍內,前束角的變化范圍為-5~5°,是BumpSteering較大的表現,屬于惡劣工況.因此將其作為目標函數,在HyperStudy中進行優(yōu)化,使其達到理想狀態(tài).
2 優(yōu)化設計
利用HyperStudy可以對車輪定位參數中的某項或多項進行優(yōu)化,使定位參數達到理想值.本文通過對懸架的部分硬點坐標進行改變,達到優(yōu)化前束角的目的.
雙橫臂懸架中影響前束角變化的主要因素是懸
架定位硬點位置的選擇.雙橫臂懸架硬點較多,但每
個硬點坐標值對設計效果的影響不同.可以利用HyperStudy中的DOE模塊進行篩選試驗,找到對前束角影響較大的幾個坐標.雖然懸架上下控制臂硬
點對前束角也有較大影響,但是由于懸架整體結構已確定,上下控制臂硬點不能更改,因此根據實際情況,此處取轉向橫拉桿外點3個方向坐標xA,yA和zA以及轉向橫拉桿內點2個方向坐標xB和zB,共5個坐標作為變量進行分析優(yōu)化.沿用一款成熟的轉向機,轉向機輸出端(橫拉桿內點)長度固定,所以內點的y方向暫不作為設計變量,最終如不能得到理想結果,再考慮橫拉桿內點y方向的變動(此時需要新開發(fā)轉向機).
設置每個坐標點的變化范圍為10%(見表1),利用HyperStudy中的DOE模塊進行分析.
表2中的第4號試驗為近似最優(yōu)組合,具體坐標值見表3.將其代入模型驗證,結果見圖4.
由圖4可知:前束角的變化范圍為-6.5~1.6°,DOE給出的近似最優(yōu)組合并沒有達到預期的結果.因此,通過Optimizaiton模塊繼續(xù)對模型進行優(yōu)化.
最優(yōu)組合與預期結果相差巨大,不排除優(yōu)化區(qū)間選取偏小的原因.此處,根據DOE分析結果中各坐標值的變動趨勢對目標函數的影響,放大對目標函數有利的優(yōu)化區(qū)間,調整優(yōu)化區(qū)間結果見表4.
此處選用序列二次規(guī)劃優(yōu)化算法進行計算[13],最大迭代次數設置為25,優(yōu)化進程見圖5,優(yōu)化結果見表5.
由圖5可知:第4次迭代以后目標函數的變化很小.由表5可知:最優(yōu)結果為第25次迭代試驗,而且最后幾次試驗響應值變化較小,優(yōu)化結果可接受.為設計方便,僅修正2個點的坐標,結果見表6.
優(yōu)化后前懸架模型前束角隨車輪跳動的變化曲線見圖6.與原懸架相比,車輪上跳180 mm、下跳90 mm時,車輪前束角的變化范圍為-0.2~0.2°,明顯減小且滿足設計要求.
優(yōu)化前優(yōu)化后的幾何模型對比見圖7,優(yōu)化后的全地形車實車懸架見圖8.
3 結束語
前懸架結構設計不當會大大影響汽車產品的使用性能,如轉向沉重、擺振、輪胎偏磨影響輪胎使用壽命等.[14]本文采用MotionView對前懸架的幾何結構進行建模和分析,并且運用HyperStudy對模型進行優(yōu)化,解決車輪跳動過程中前束角變化過大問題.
本文前懸架系統(tǒng)的優(yōu)化、經驗參數的設置等可對全地形車及其他車型的懸架系統(tǒng)設計優(yōu)化提供參考.在開發(fā)新車或在已有車型基礎上進行改進設計時,在實際樣件、樣車制造出來之前,利用MotionView及HyperStudy提供的動態(tài)仿真環(huán)境對前懸架甚至整車的一些主要性能進行預測、評估,可以大大縮短產品的開發(fā)周期.用本文方法進行的自制全地形車前懸架設計優(yōu)化,證明此方法可縮短開發(fā)周期,優(yōu)化后的懸架系統(tǒng)在后期實車路試中表現突出.
參考文獻:
[1]金曉輝, 宋永剛, 何建清. 輕型全地形車現狀及發(fā)展趨勢分析[J]. 汽車運用, 2005(7): 1516.
JIN Xiaohui, SONG Yonggang, HE Jianqing. Analysis of current situation and development trend of light allterrain vehicle[J]. Auto Application, 2005(7): 1516.
[2]賈小平, 于魁龍, 李軍. 全地形車輛現狀與發(fā)展趨勢[EB/OL]. (20101204)[20150401]. http://wenku.baidu.com/link?url=LZ_zjrkl9mNl4yq0NLrEeh_wMjum8bO3TJC3Nl9PhUkAKxNlopUbAvcoUmW15nNCVL65BJ3t93cBE84DuxXF37IDw9S_jXNo6cHpRzEAdS.
[3]王磊, 金達鋒. 全地形車中、后橋雙橫臂平衡懸架設計[J]. 拖拉機與農用運輸車, 2007, 34(1): 6466.
WANG Lei, JIN Dafeng. Middle & rear double wishbone equilibrium suspension's design of all terrain vehicle[J]. Tractor & Farm Transporter, 2007, 34 (1): 6466.
[4]馮仁川. UTV前懸架的優(yōu)化設計及整車穩(wěn)態(tài)轉向特性研究[D]. 天津: 天津大學, 2011.
[5]李修峰, 王亞斌, 王晨. MotionView & MotionSolve應用技巧與實例分析[M]. 北京: 機械工業(yè)出版社, 2013: 269275.
[6]余志生. 汽車理論[M]. 北京: 機械工業(yè)出版社, 2009: 130200.
[7]張洪欣. 汽車設計[M]. 2版. 北京: 機械工業(yè)出版社, 1996: 149184
[8]安相璧, 李樹珉, 馬效. 車輪定位與輪胎磨損關系分析[J]. 汽車研究與開發(fā), 2001(2): 3032.
AN Xiangbi, LI Shumin, MA Xiao. Relationship between wheel alignment and tire wear[J]. Automobile Research & Development, 2001(2): 3032.
[9]季喜軍, 耿振江. 現代汽車轉向輪定位參數的變化[J]. 山西交通科技, 2001(1): 4647.
JI Xijun, GENG Zhenjiang. Change of modern automobile steering wheel orientation parameter[J]. Shanxi Science & Technology of Communications, 2001(1): 4647.
[10]馬文烈, 李芳根, 劉仁鑫. 車輪外傾角與前束合理匹配的研究[J]. 拖拉機與農用運輸車, 2006, 33(3): 5152.
MA Wenlie, LI Fanggen, LIU Renxin. Research on rightful matching with toein and camber of wheels[J]. Tractor & Farm Transporter, 33(3): 5152.
[11]尤明福, 刁哲軍, 邢世凱. 汽車四輪定位分析及檢測[J]. 汽車技術, 2002, 9(3): 3840.
YOU Mingfu, DIAO Zhejun, XING Shikai. Analysis and measurement of vehicle fourwheel alignment[J]. Automobile Technology, 2002, 9(3): 3840.
[12]國家質量監(jiān)督檢驗檢疫總局. 機動車運行安全技術條件: GB 7258—1977[S].
[13]洪清泉, 趙康, 張攀, 等. OptiStruct&HyperStudy理論基礎與工程應用[M]. 北京: 機械工業(yè)出版社, 2013: 350356.
[14]褚志剛, 鄧兆祥, 胡玉梅, 等. 汽車前輪定位參數優(yōu)化設計[J]. 重慶大學學報(自然科學版), 2003, 26(2): 58.
CHU Zhigang, DENG Zhaoxiang, HU Yumei, et al. optimization of vehicle frontal wheel orientation parameters[J]. Journal of Chongqing University(Natural Science Edition), 2003, 26(2): 58.
(編輯 武曉英)
