基于RSSI濾波的改進型泰勒級數(shù)室內(nèi)定位算法
2016-02-24 05:06:48周禮爭
計算機技術(shù)與發(fā)展 2016年5期
關(guān)鍵詞:卡爾曼濾波
程 俊,周禮爭,余 敏,唐 瑞
(1.江西師范大學(xué) 計算機信息工程學(xué)院,江西 南昌 330022;2.江西師范大學(xué) 軟件學(xué)院,江西 南昌 330022)
基于RSSI濾波的改進型泰勒級數(shù)室內(nèi)定位算法
程 俊1,周禮爭1,余 敏1,唐 瑞2
(1.江西師范大學(xué) 計算機信息工程學(xué)院,江西 南昌 330022;2.江西師范大學(xué) 軟件學(xué)院,江西 南昌 330022)
針對基于RSSI測距的無線傳感網(wǎng)絡(luò)室內(nèi)定位算法中,RSSI值易受環(huán)境影響、定位精度差的問題,文中提出了一種RSSI值優(yōu)化處理、泰勒級數(shù)進行改進的定位算法。該算法先將采集的RSSI值進行高斯-卡爾曼濾波處理,然后在不用求模型參數(shù)的情況下,引入降維思想求出了測距值,最后對泰勒級數(shù)進行改進,并用加權(quán)極大似然和改進的泰勒級數(shù)相結(jié)合的定位算法求出了定位位置。仿真結(jié)果表明:經(jīng)過RSSI濾波的改進型泰勒級數(shù)定位算法,優(yōu)化了RSSI值,提高了測距精度,使得定位算法的定位誤差維持在0.9~1.2 m,提高了定位的穩(wěn)定性和精確度。
接收信號強度指示;室內(nèi)定位;高斯-卡爾曼濾波;模型參數(shù);泰勒級數(shù)
0 引 言
近年來,隨著無線傳感器網(wǎng)絡(luò)(Wireless Sensor Network,WSN)[1]的快速發(fā)展,無線定位技術(shù)的應(yīng)用進入了一個嶄新的時代。在各種體育館、復(fù)雜的購物商場等大型建筑,為了獲得人員或物品的確切位置,室內(nèi)定位技術(shù)顯得格外重要。目前,無線傳感器網(wǎng)絡(luò)的室內(nèi)定位技術(shù)可以分為測距和非測距兩大類[2-3]。測距算法包括TOA[4]、TDOA[5]、RSSI[6]、AOA[7]等;非測距算法包括APIT[8]、凸規(guī)劃法、質(zhì)心法、DV-Hop[9]等等。
基于RSSI測距的室內(nèi)定位算法操作簡單,無需額外大量硬件,使之得到了廣泛應(yīng)用[10]。但是由于RSSI值易受環(huán)境影響,所以此方法得到的定位結(jié)果會存在很大誤差[11]。文獻[12]用高斯濾波減少了RSSI樣本中偏離真實值較大的部分,使得濾波得到的RSSI值更加準(zhǔn)確。文獻[13]提出了一種基于RSSI距離比的定位算法,在測距階段利用距離比關(guān)系消除了模型參數(shù)A,減少了因為計算模型參數(shù)帶來的誤差,提高了測距精度。文獻[14]將加權(quán)極大似然法得到的值,作為泰勒級數(shù)的初始展開位置,有效減少了泰勒級數(shù)迭代的次數(shù),降低了定位誤差。
受上述相關(guān)研究的啟發(fā),文中提出了基于RSSI高斯-卡爾曼濾波的改進泰勒級數(shù)和加權(quán)極大似然法相結(jié)合的定位算法。
1 RSSI值的優(yōu)化
1.1 傳統(tǒng)濾波方法分析
室內(nèi)定位中,由于存在人員走動、信號反射等不穩(wěn)定因素,使接收的RSSI值存在很大誤差。為了提高其精確度,常常對其進行濾波處理,其中高斯濾波、卡爾曼濾波是常用的濾波處理方法。高斯濾波可以解決RSSI在實際測試中易受干擾、穩(wěn)定性差等問題,但對于陰影效應(yīng)、電子儀器本身干擾等長時間干擾問題處理效果欠佳,無法對數(shù)據(jù)進行平滑輸出;卡爾曼濾波能去除疊加在信號上的加性噪聲,平滑顯著誤差,但卻無法去除誤差,若末尾幾個測量值誤差大,將對結(jié)果產(chǎn)生重大影響。
1.2 高斯-卡爾曼濾波優(yōu)化RSSI值
文中采用混合濾波的方法,將卡爾曼濾波、高斯濾波相結(jié)合,提出高斯-卡爾曼濾波。該濾波先對采集的RSSI值信號進行高斯擬合,篩選出高概率發(fā)生區(qū)域的RSSI值,再對篩選出的RSSI值進行卡爾曼濾波。
1.2.1 高斯濾波取值
同一個節(jié)點接收到的多個RSSI值,由于各種干擾,必然存在由誤差引起的小概率事件,通過高斯模型可以篩選出高概率發(fā)生區(qū)的RSSI值。
設(shè)RSSI服從(0,δ2)的高斯分布,其概率密度函數(shù)為:
(1)


1.2.2 卡爾曼濾波
高斯濾波取值可以濾除一大部分偏離真實值的RSSI值,但是對于疊加在信號上的加性噪聲,則無能為力。而且傳統(tǒng)的高斯濾波只是對高斯濾波取值后的數(shù)據(jù)進行簡單的求平均,并不能平滑RSSI值,為此文中在高斯濾波取值后進行了卡爾曼濾波。其具體過程如下:
狀態(tài)預(yù)測方程為:
(2)
狀態(tài)更新方程為:
(3)
式中:X(k|k-1)為目前狀態(tài)的預(yù)測值,X(k-1|k-1)為上一轉(zhuǎn)態(tài)值;A、B為系統(tǒng)參數(shù);U(k)為現(xiàn)在轉(zhuǎn)態(tài)的控制量,如果沒有,可以為0;P(k|k-1)為對應(yīng)于X(k|k-1)的協(xié)方差,P(k-1|k-1)為X(k-1|k-1)對應(yīng)的協(xié)方差;Q為系統(tǒng)噪聲;Z(k)為k時刻的測量值;H為測量系統(tǒng)的參數(shù);Kg(k)為卡爾曼濾波增益;R為量測噪聲;P(k|k)為目前轉(zhuǎn)態(tài)的更新值;I為單位矩陣,對于單模型單測量,I=1。
由式(2)和(3)可以看出,卡爾曼濾波可以通過“預(yù)測-更新”的模型遞歸思想,由系統(tǒng)的實際測量值和預(yù)估值來消除隨機噪聲,用上一狀態(tài)RSSI預(yù)估值和現(xiàn)在狀態(tài)RSSI的測量值來推導(dǎo)出現(xiàn)在現(xiàn)在狀態(tài)的RSSI值,平滑了數(shù)據(jù)。
綜上所述,通過高斯-卡爾曼濾波,可以有效去除RSSI數(shù)據(jù)中的突變數(shù)據(jù)和噪聲波動,實現(xiàn)RSSI值的準(zhǔn)確、平滑輸出,為測距模型的精確建立打下基礎(chǔ)。
2 無需測量模型參數(shù)的測距算法
假設(shè)定位節(jié)點周圍有n個錨節(jié)點單播互發(fā)空偵,它們之間一跳的距離為r1,r2,…,rn,相對應(yīng)的經(jīng)過高斯-卡爾曼濾波的RSSI值為|RSSI1|,|RSSI1|,…,|RSSIn|,則根據(jù)對數(shù)模型可得:
(4)
公式可以寫成Y=bX形式,其中:
(5)
由于A和n計算繁瑣,而且如果算法不合理或考慮不全面,將會影響到后面的定位算法。為此,引入了降維的思想,在Y=bX兩邊同時左乘bT,將矩陣降至2維,得公式如下:
(6)
(7)
通過式(6)和(7)可以將bTY=bTbX還原為二元二次方程,再結(jié)合未知節(jié)點的距離信號關(guān)系方程,可列出以下方程組:
(8)

(9)

3 定位算法的改進
3.1 加權(quán)極大似然和泰勒級數(shù)結(jié)合的定位算法
Taylor級數(shù)展開定位法具有很高的定位精度,但是倘若初值設(shè)置不當(dāng),將使迭代次數(shù)增加,計算復(fù)雜度大大增加。文獻[9]將加權(quán)似然法得到的初始坐標(biāo)作為泰勒級數(shù)的初始展開位置,減少了迭代次數(shù),降低了定位誤差,其具體步驟如下:

(10)
真實坐標(biāo)可表示為加權(quán)似然得到的坐標(biāo)與位置偏移量之和:
x=x′+Δx,y=y′+Δy
(11)
在節(jié)點估計坐標(biāo)(加權(quán)似然法得到的坐標(biāo))處按泰勒級數(shù)展開(消除非線性項):

(12)
將式(12)用矩陣表示:
B=AΔ
(13)
其中:
方程的解為:
Δ=(ATA)-1ATB
(14)
令:
重復(fù)上述過程,直到|Δx|+|Δy|<ε,ε為預(yù)先設(shè)定的閾值,將此時的(x',y')作為定位節(jié)點的最終估計位置。
3.2 加權(quán)極大似然和改進型泰勒級數(shù)結(jié)合的定位算法

根據(jù)這一思想,可以對泰勒級數(shù)做如下改進:
QB=AΔ
(15)

(16)

最后,用加權(quán)極大似然法計算出初始估計坐標(biāo),代入改進的泰勒級數(shù)展開,可以得到新的定位結(jié)果。
4 實驗結(jié)果與分析
文中采用Matlab對提出的算法進行仿真實驗,以此來驗證算法的有效性。仿真環(huán)境設(shè)計在一個8 m×6 m的矩形區(qū)域,用障礙物無規(guī)則的移動(快速、中速、慢速都有可能)代替室內(nèi)環(huán)境下的人員走動,并在區(qū)域中加入均值為0、方差為4dB的高斯白噪聲。然后在同一高度的四個角落布置4個錨節(jié)點,其坐標(biāo)分為(0,0),(8,0),(0,6),(8,6),錨節(jié)點和未知節(jié)點的采樣頻率都為5 次/s,同一段連續(xù)時間后,未知節(jié)點采集到不同錨節(jié)點發(fā)送的200次RSSI信號,每個錨節(jié)點采集到其他不同錨節(jié)點發(fā)送的200次RSSI信號,然后改變未知節(jié)點位置,重復(fù)上述實驗10次,獲得10組不同的數(shù)據(jù)。
4.1 濾波性能的分析
每一次實驗都分別從4個錨節(jié)點發(fā)送給未知節(jié)點的200次RSSI信號中隨機取出50個值,將它們重新整合,建立樣本,并以樣本標(biāo)準(zhǔn)差σs作為濾波性能的判定,其公式為:
(17)
其中:RSSI為樣本平均值;RSSIi為采樣點上濾波值。
圖1比較了高斯濾波、卡爾曼濾波、高斯-卡爾曼濾波對RSSI的濾波性能。
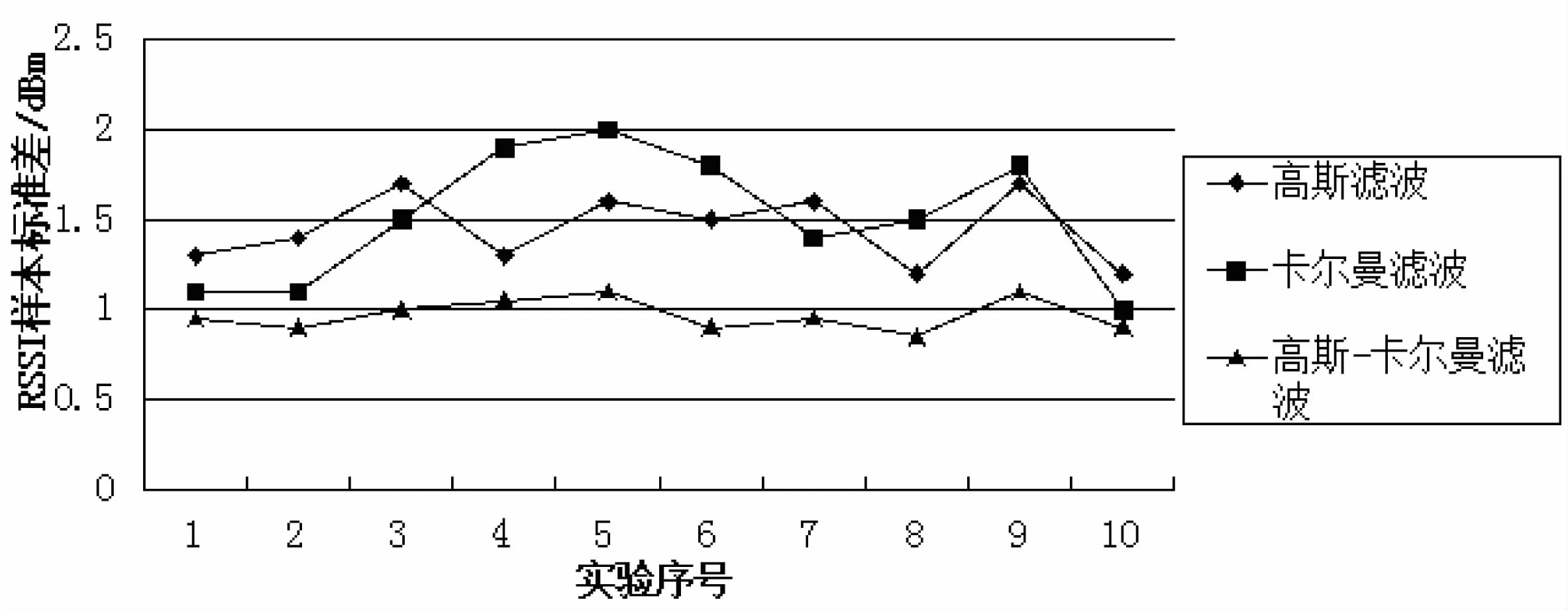
圖1 RSSI樣本標(biāo)準(zhǔn)差對比圖
由圖1可以發(fā)現(xiàn):
(1)卡爾曼濾波模型的RSSI樣本標(biāo)準(zhǔn)差波動比較大。這是由于,當(dāng)顯著誤差不多時,卡爾曼濾波能在一定程度上將采樣值平滑輸出,而當(dāng)顯著誤差較多時,由于卡爾曼濾波只能平滑顯著誤差,無法去除,其去除顯著誤差的能力不如高斯模型。
(2)高斯濾波能夠消除顯著誤差,并在一定程度上減小由于短時間干擾引起的RSSI值波動比較大的情況,使得σs偏差維持在1.5dBm左右。
(3)經(jīng)過高斯-卡爾曼濾波后,RSSI樣本標(biāo)準(zhǔn)差誤差維持在1dBm左右,相比高斯模型,其整體上波動更小,濾波性能更穩(wěn)定,平滑了RSSI的輸出值。
4.2 定位精度的分析
將未知節(jié)點和錨節(jié)點收到的200次RSSI信號進行高斯-卡爾曼濾波,并通過式(9)求得未知節(jié)點到錨節(jié)點的距離,最后進行定位實驗。
選取定位誤差e作為定位性能的判定,其公式為:
(18)
其中,未知節(jié)點真實坐標(biāo)為(x0,y0),計算得到的坐標(biāo)為(x,y)。
圖2比較了兩種定位算法:加權(quán)極大似然和泰勒級數(shù)結(jié)合的定位算法、加權(quán)極大似然和改進泰勒級數(shù)結(jié)合的定位算法。

圖2 定位誤差對比圖
由圖2可知:
(1)和傳統(tǒng)定位方法相比,改進的方法整體上的定位誤差明顯小于傳統(tǒng)方法。傳統(tǒng)定位方法的定位誤差為1.5m左右,而改進的方法降低為1.0m左右。
(2)傳統(tǒng)定位方法的定位誤差波動范圍為1.2~1.8m,而改進的定位算法由于考慮了距離因素的影響,定位誤差波動范圍減小為0.9~1.2m,減少了定位誤差,提高了定位的穩(wěn)定性。
5 結(jié)束語
文中針對室內(nèi)環(huán)境下基于RSSI測距的定位算法誤差比較大的問題,提出先用高斯-卡爾曼濾波優(yōu)化RSSI值,然后利用錨節(jié)點的關(guān)系,在不用測模型參數(shù)的情況下,求出了測距值,最后對泰勒級數(shù)進行改進,并將加權(quán)極大似然法和改進的泰勒級數(shù)相結(jié)合求出了定位位置。實驗結(jié)果表明:基于高斯-卡爾曼濾波的加權(quán)極大似然和改進泰勒級數(shù)相結(jié)合的定位算法,有效減少了定位誤差,使得定位誤差維持在0.9~1.2m,提高了定位的準(zhǔn)確度和穩(wěn)定性。
基于高斯-卡爾曼濾波的加權(quán)極大似然和改進泰勒級數(shù)相結(jié)合的定位算法提高了定位精度,但仍存在一定的局限,以后可以從以下幾個方向進行改進:
(1)加權(quán)極大似然和改進泰勒級數(shù)相結(jié)合的定位算法,增加了算法復(fù)雜性。下一步工作將尋找某種算法,使得定位精度提高的同時,減小算法的復(fù)雜度。
(2)文中針對的只是基于RSSI測距的靜態(tài)定位算法,下一步將考慮在未知節(jié)點移動的情況下,如何進行有效定位的問題。
[1]YickJ,MukherjeeB,GhosalD.Wirelesssensornetworksurvey[J].ComputerNetworks,2008,52(12):2292-2330.
[2]NasipuriA,LiK.Adirectionalitybasedlocationdiscoveryschemeforwirelesssensornetworks[C]//ProceedingsofACMinternationalworkshoponwirelesssensornetworksandapplication.Atlanta,USA:ACM,2002:105-111.
[3] 彭 渤.基于RSSI測距誤差補償?shù)臒o線傳感器網(wǎng)絡(luò)定位算法研究[D].大連:大連理工大學(xué),2008.
[4]HanerA,HopperA,StegglesP,etal.Theanatomyofacontext-awareapplication[C]//Procofthe5thannualACM/IEEEinternationalconferenceonmobilecomputingandnetworking.[s.l.]:ACM,1999.
[5] 陳鴻龍,李鴻斌,王 智.基于TDOA測距的傳感器網(wǎng)絡(luò)安全定位研究[J].通信學(xué)報,2008,29(8):11-21.
[6]LuthyKA,EgrantD,HendersonTC.LeveragingRSSIforroboticrepairofdisconnectedwirelesssensornetworks[C]//Procof2007IEEEinternationalconferenceonroboticsandautomation.[s.l.]:IEEE,2007:10-14.
[7]ZengFanzhen,YuMin,ZouChengwu,etal.Animprovedpointintriangulationlocalizationalgorithmbasedoncosinetheorem[C]//Procof2012 8thinternationalconferenceonwirelesscommunications,networkingandmobilecomputing.Shanghai,China:IEEE,2012:1652-1655.
[8]ZhangJianping,YuMin,ZhangKe,etal.AnimprovedweightedtrianglecentroidlocalizationalgorithmofAPITforwirelesssensornetworks[C]//Procof2012internationalconferenceoncomputerandinformationscience,safetyengineering.Wuhan,China:IEEE,2012:18-21.
[9]ZhangDengyin,CuiGuodong.AnunionnodelocalizationalgorithmbasedonRSSIandDV-HopforWSNs[C]//Procof2012secondinternationalconferenceonIMCC.[s.l.]:[s.n.],2012:1094-1098.
[10] 陶為戈,朱昳華,賈子彥.基于RSSI混合濾波和最小二乘參數(shù)估計的測距算法[J].傳感技術(shù)學(xué)報,2012,25(12):1748-1753.
[11] 吳君欽,盧 陶.基于RSSI測距的無線傳感器網(wǎng)絡(luò)定位算法[J].微電子學(xué)與計算機,2014,31(5):49-52.
[12] 董瑩瑩.WiFi網(wǎng)絡(luò)下的三維空間定位技術(shù)研究[D].北京:北京郵電大學(xué),2012.
[13] 吳桂平,虞慧群,范貴生.一種基于RSSI距離比的傳感器節(jié)點定位算法[J].華東理工大學(xué)學(xué)報:自然科學(xué)版,2013,39(5):596-600.
[14] 肖婷婷.基于RSSI測距的室內(nèi)定位算法研究及改進[D].南昌:江西師范大學(xué),2015.
Indoor Localization Algorithm of Improved Taylor Series Based on RSSI Filter
CHENG Jun1,ZHOU Li-zheng1,YU Min1,TANG Rui2
(1.School of Computer Information and Engineering,Jiangxi Normal University,Nanchang 330022,China;2.School of Software,Jiangxi Normal University,Nanchang 330022,China)
Aiming at the problem that the RSSI is susceptible to the environment and the accuracy is poor in the indoor localization of wireless sensor networks,a kind of positioning algorithm is proposed by the optimized RSSI and the improved Taylor series.Firstly,all measured RSSI that the node received are processed by the Gauss-Kalman filtering.Although it does not introduce the model parameters,the value of ranging is got by thought of dimension reduction.Finally,the Taylor series is improved and the position is got by the weighted maximum likelihood estimation method and the improved Taylor series.The simulation shows that the RSSI is optimized and the accuracy of ranging is improved by the indoor localization algorithm of the improved Taylor series based on RSSI filter.It made the accuracy kept between 0.9 to 1.2 m,improving the accuracy and stability of the indoor positioning.
received signal strength indication;indoor localization;Gauss-Kalman filter;model parameters;Taylor series
2015-08-11
2015-11-12
時間:2016-05-05
國家自然科學(xué)基金資助項目(41374039);國際科技合作項目(35-14)
程 俊(1989-),男,碩士研究生,研究方向為無線傳感網(wǎng)絡(luò);余 敏,教授,碩士生導(dǎo)師,研究方向為無線傳感網(wǎng)絡(luò)。
http://www.cnki.net/kcms/detail/61.1450.TP.20160505.0828.072.html
TP393
A
1673-629X(2016)05-00051-05
10.3969/j.issn.1673-629X.2016.05.011
猜你喜歡
測控技術(shù)(2018年11期)2018-12-07 05:49:38
測控技術(shù)(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
中國慣性技術(shù)學(xué)報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(shù)(2016年9期)2016-02-27 09:05:39
江蘇科技大學(xué)學(xué)報(自然科學(xué)版)(2015年4期)2015-12-17 12:42:50
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36