不同迎角和速度下充氣式返回艙氣動性能預測
2016-02-23 03:42:17趙曉舜余莉楊雪
航天返回與遙感 2016年5期
關鍵詞:模型
趙曉舜 余莉 楊雪
(南京航空航天大學航空宇航學院,南京 210016)
不同迎角和速度下充氣式返回艙氣動性能預測
趙曉舜 余莉 楊雪
(南京航空航天大學航空宇航學院,南京 210016)
減速是返回式航天飛行器必須面對的關鍵性問題。充氣式返回艙通過降低返回系統的質量增加了有效載荷,具有質量輕、易折疊包裝、展開阻力面積大,再入時彈道系數低和產生的氣動熱量小等優點。文章以美國 NASA的充氣式返回艙(IRV-3)為研究對象,采用有限體積法進行了不同速度和迎角下的流場數值計算。研究對比了充氣式返回艙在粘性模型和無粘模型下的流場數值結果,發現無粘模型在超聲速情況下能滿足一定的精度要求,提高了計算穩定性和計算效率。考察了不同迎角、速度下充氣式返回艙的氣動性能,結果表明阻力系數隨著馬赫數增加升高之后再逐漸降低,在Ma=5時氣動阻力最大;合適的迎角可以降低俯仰力矩系數,增加返回艙的穩定性;迎角在小角度變化時,俯仰力矩系數和升力系數變化較大,而阻力系數變化較小。文章的研究結果對充氣式返回艙的設計及分析有一定參考意義。
充氣式返回艙氣動性能 計算流體動力學 粘性模型 航天返回
0 引言
隨著深空探測技術的發展,傳統的第一代剛性再入返回艙由于質量大[1]、有效載荷小等諸多限制已經無法滿足探測的需要[2-4],第二代柔性充氣式再入返回艙作為一種新技術應運而生。充氣式返回艙是一種新型充氣式再入飛行器,不僅具有質量輕[5]、可折疊包裝、收攏體積小[6-7]等優點,而且其展開氣動外形在再入過程中可提供滿足工作要求的阻力,表面的柔性防熱材料還能承受較高的溫度環境[8-9]。充氣式返回艙技術受到國際航天界的高度關注[10]。
美國NASA研究的充氣式返回艙以前拋型充氣氣囊(Inflatable Re-entry Vehicle, IRV)為代表,它是一種堆疊圓環型充氣式返回艙[11]。美國曾先后進行了3次飛行試驗,分別驗證了在氣動力載荷作用下充氣殼結構保形能力、彈道性能和材料特性。在數值仿真方面,NASA對充氣式和剛性返回艙的氣體動力學進行了數值仿真,對比了它們在不同迎角下阻力系數[12],對IRV-4測試的充氣式返回艙結構采用有限元方法進行動態特性分析,與實驗對比分析了織物材料的抗載荷能力[13]。隨著中國空間活動的日益頻繁和深空探測項目的啟動,我們也將面臨各種不同體積質量載荷的回收問題和探測器在其他行星上的進入問題,充氣式減速技術的預先研究工作也漸漸開始進行。北航已經制造出了一個最大直徑 3m,頭錐角90°的充氣式防熱罩原理樣機,用以進行相關技術的探索和驗證[14];文獻[15]采用ANSYS對堆疊圓環型的結構進行靜力學分析;文獻[16]等對溫度場、熱應力及變形進行了數值計算,文獻[17]對兩次充氣和單次充氣式返回艙的再入彈道進行了比較分析。但是國內對于不同速度迎角情況下充氣式返回艙的氣動性能的研究文章還比較少。
本文以NASA的IRV-3為研究對象,分別采用粘性模型和無粘模型,基于ICEM和FASTRAN軟件開展了不同迎角和速度下的數值仿真,分析了粘性對于數值計算結果的影響,考察了迎角和速度對IRV-3氣動性能的影響。本文的研究結果對充氣式返回艙的設計及分析有一定參考意義。
1 控制方程
流體力學的控制方程分為連續方程、動量方程和能量方程。控制方程分別遵循著的三大物理規律是質量守恒、牛頓第二定律和能量守恒。本文中無粘模型忽略了粘性力對于流體運動的影響,而粘性模型是包含粘性力的完整控制方程。
1.1 無粘模型
無粘模型流動忽略了流動中的運輸和粘性耗散現象,控制方程如下:

式中 ρ為流體密度;Lj、vj為x、y、z的任一方向坐標分量和相對速度分量。

式中 Li、vi為區別于j坐標的坐標分量和區別于j坐標的平均相對速度分量;p為壓強。

式中 E為總能量;H為總焓;qj為某一方向的熱通量。
1.2粘性模型
充氣式返回艙工作時運動速度很大,為三維粘性可壓縮流動。粘性模型的連續性方程、動量方程和能量方程分別為:
式中 μ為分子粘性系數;tμ為湍流渦粘性系數;eμ為有效粘性系數。

為了得到粘性模型湍流方程的解,本文引入的k-ε湍流模型來封閉。補充方程如下:

式中 k為湍流動能;ε為湍流耗散率;計算參數(取值來自于FASTRAN軟件幫助文檔)kσ=1.0。

式中 計算參數(取值來自于FASTRAN軟件幫助文檔)c1=1.44;c2=1.92;kσ=1.3。
2 算例驗證
本文數值計算采用有限體積法進行,其中無粘模型通量采用Roe格式[18],粘性模型通量采用中心差分格式離散,時間離散均采用隱式LU-SGS方法[19]。為驗證本文數值計算的可靠性,由于公開文獻無法檢索到IRV-3的不同迎角速度下的實驗數據,以文獻[20]的圓柱形鈍頭體為對象(此鈍頭體半徑為0.05m),以此來開展高超音速粘性模型的流場計算。計算工況為:來流Ma=8,流場初始靜壓強是855Pa,溫度是1 726K,壁面溫度設定為恒溫294K且無滑移[20]。

圖1 本文與文獻的流場網格和圓柱表面壓力曲線對比Fig.1 Comparison of cylindrical surface pressure and flow field grid between this paper and the reference paper
文獻[20]中給出了數值仿真沿圓柱表面0°~90°的壓力變化曲線以及風洞實驗數據。圖1中(c)圖為本文與文獻[20]沿圓柱表面壓力曲線對比,可以看出本文數值仿真結果和文獻計算結果吻合很好,趨勢一致,和風洞實驗數據相比壓力的誤差在 6%以內。可見針對超聲速流場計算本文采用的數值方法具有較高的一致性。
3 數值模型
IRV-3的實體模型和幾何尺寸如圖2。充氣式返回艙的直徑和高度分別為3.0m和1.6m,環形結構直徑為0.3m,半錐角為60°,中心體直徑為0.39m。由于充氣圓環內部為保壓的結構,變形小,本文將其內部充氣圓環簡化為連通結構,將充氣式返回艙簡化為剛體模型。采用ICEM軟件建立了充氣式返回艙的流場分塊結構化網格,如圖3所示。為了模擬火星再入環境,將來流氣體的環境設置為地球50km處,來流氣體環境的參數如表1所示,此時溫度為270.65K,壓強為75.77Pa。采用有限體積方法進行計算,壁面設置為無滑移絕熱壁。
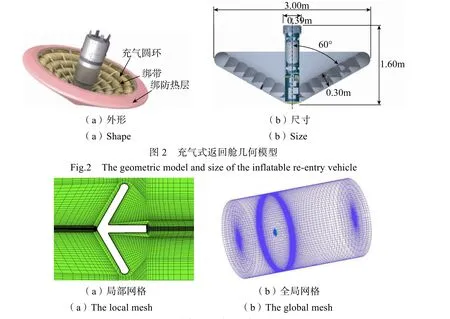
圖3 充氣返回艙的流場網格Fig.3 The flow field mesh of inflatable reentry vehicle

表1 計算仿真的環境模型Tab.1 The environmental model of CFD
網格數量對計算準確性及計算消耗均有很大的影響,本文在0°迎角,Ma=5工況下對IRV-3開展了網格相關性測試,網格數量從100萬至350萬共6種,計算結果如圖4所示,縱坐標表示充氣式返回艙阻力系數Cd、升力系數CL、俯仰力矩Cm隨著網格數cell的變化情況。計算結果表明,當網格數大于200萬時,氣動系數變化趨勢減小,網格數的增加對計算結果影響不大,反而會大大增加計算消耗。最終確定數值計算流場網格數為240萬,其中壁面第一層網格尺寸為0.015mm。
4 無粘模型和粘性模型的對比
圖5、圖6為不同速度下無粘模型和粘性模型下流場對比和氣動系數的變化:Ma≤4粘性模型中摩擦、熱傳導等耗散使得返回艙圓環處分離點前移,前部壓強小于無粘模型,阻力系數變小;Ma≥4兩種模型的流場特性相差無幾,兩種模型的阻力系數相差很小(圖6);Ma=1時,粘性模型使得流過返回艙時邊界層分離點提前,導致粘性模型上下壓差較大,升力系數更高,而在Ma≥2以上,二者相差不大(圖6)。對上述結果進行分析認為:隨著速度的升高,雷諾數逐漸增大,慣性力相對于粘性力的比值增加,慣性阻力作用增強,粘性力影響減弱。可見隨著速度的增加粘性模型對于氣動系數的影響越來越小,在Ma≥4的超聲速區域使用無粘模型計算可以保證工程計算精度,提高計算穩定性和計算效率。
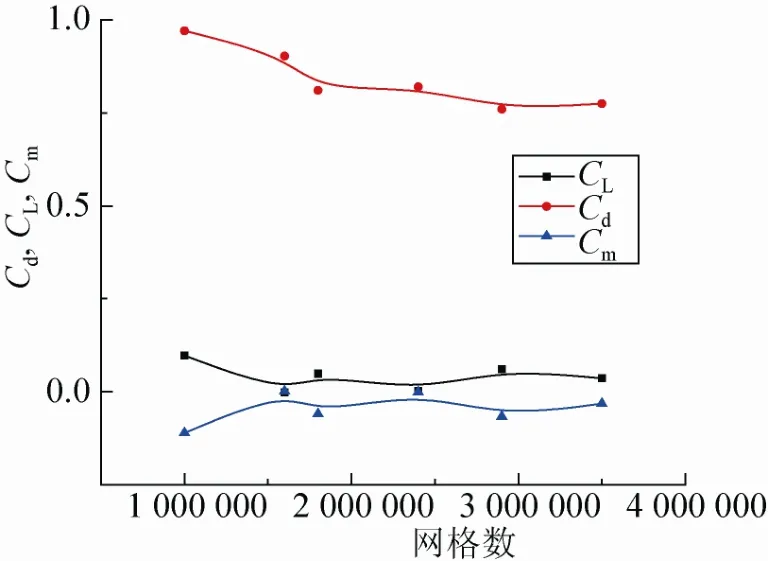
圖4 充氣式返回艙網格模型Fig.4 The mesh of the inflatable re-entry vehicle
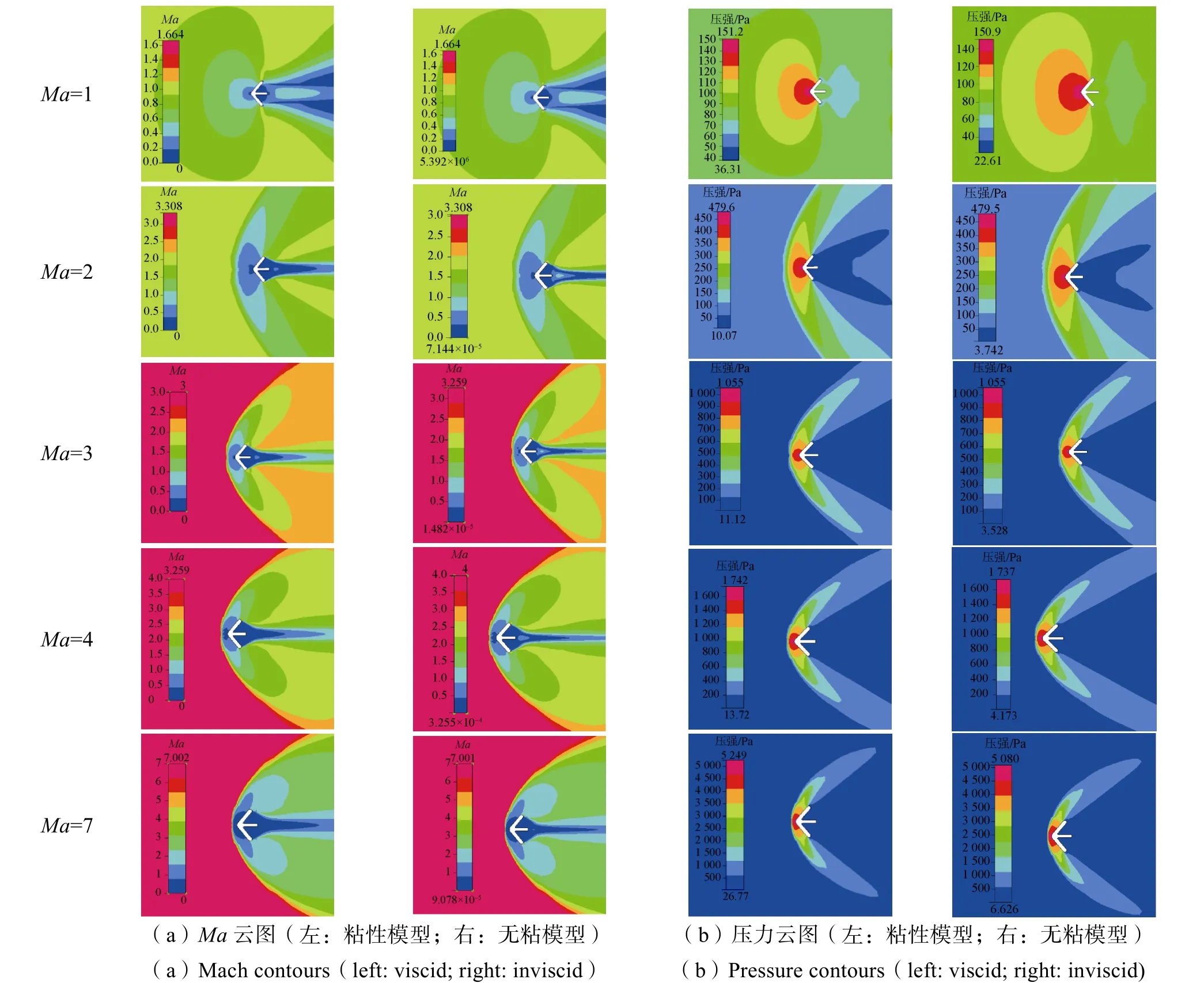
圖5 不同速度下無粘模型和粘性模型下流場對比Fig.5 The flow field of viscid model and inviscid model at different speed
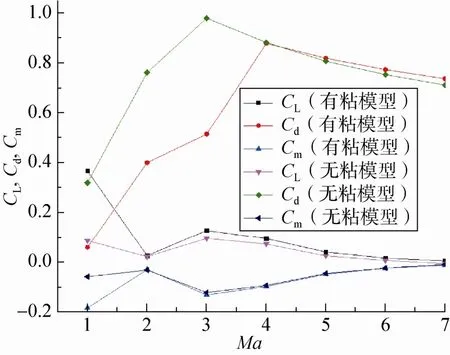
圖6 不同速度下的氣動系數的變化Fig.6 The aerodynamic coefficient at different speed
5 粘性模型下迎角速度影響分析
圖7和圖9分別為不同迎角和不同速度下返回艙的流場,圖8和圖10分別為氣動系數隨迎角及速度的變化曲線。
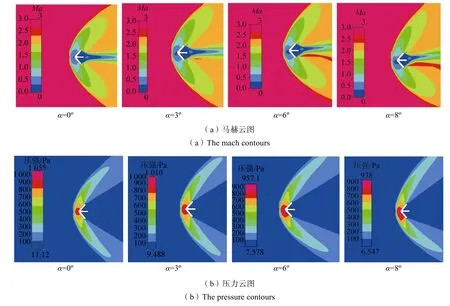
圖7 不同迎角下返回艙的流場(Ma=3;迎角α=0°,3°,6°,8°)Fig.7 The mach and pressure contours of IRV at different attack angle
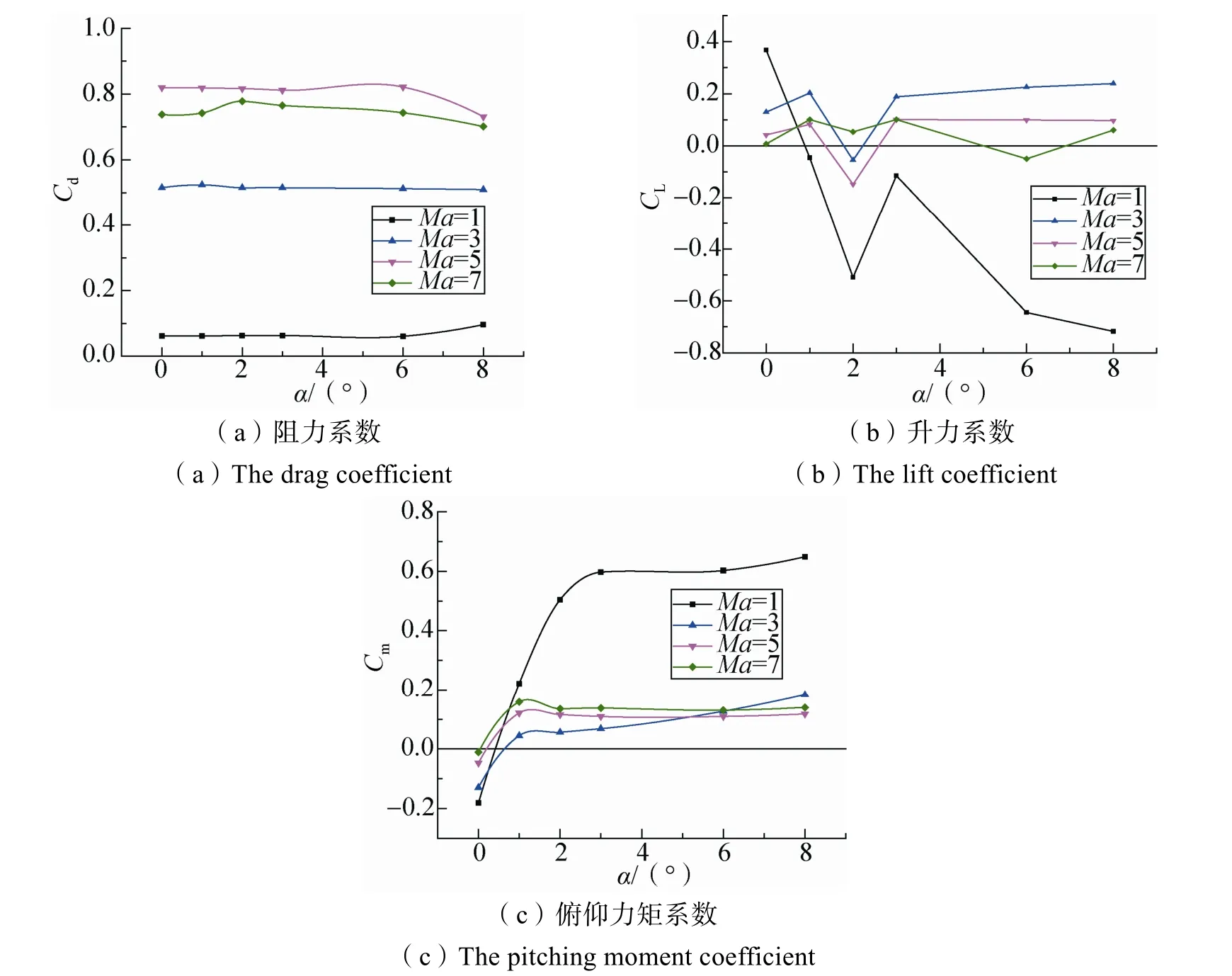
圖8 迎角對氣動系數的影響Fig.8 The influence of angle of attack on aerodynamic coefficients
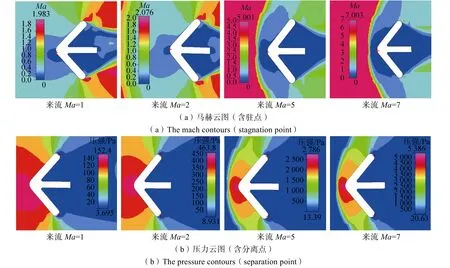
圖9 不同Ma下返回艙的流場(迎角α=3°;Ma=1、2、5、7)Fig.9 The mach and pressure contours of IRV at different Mach
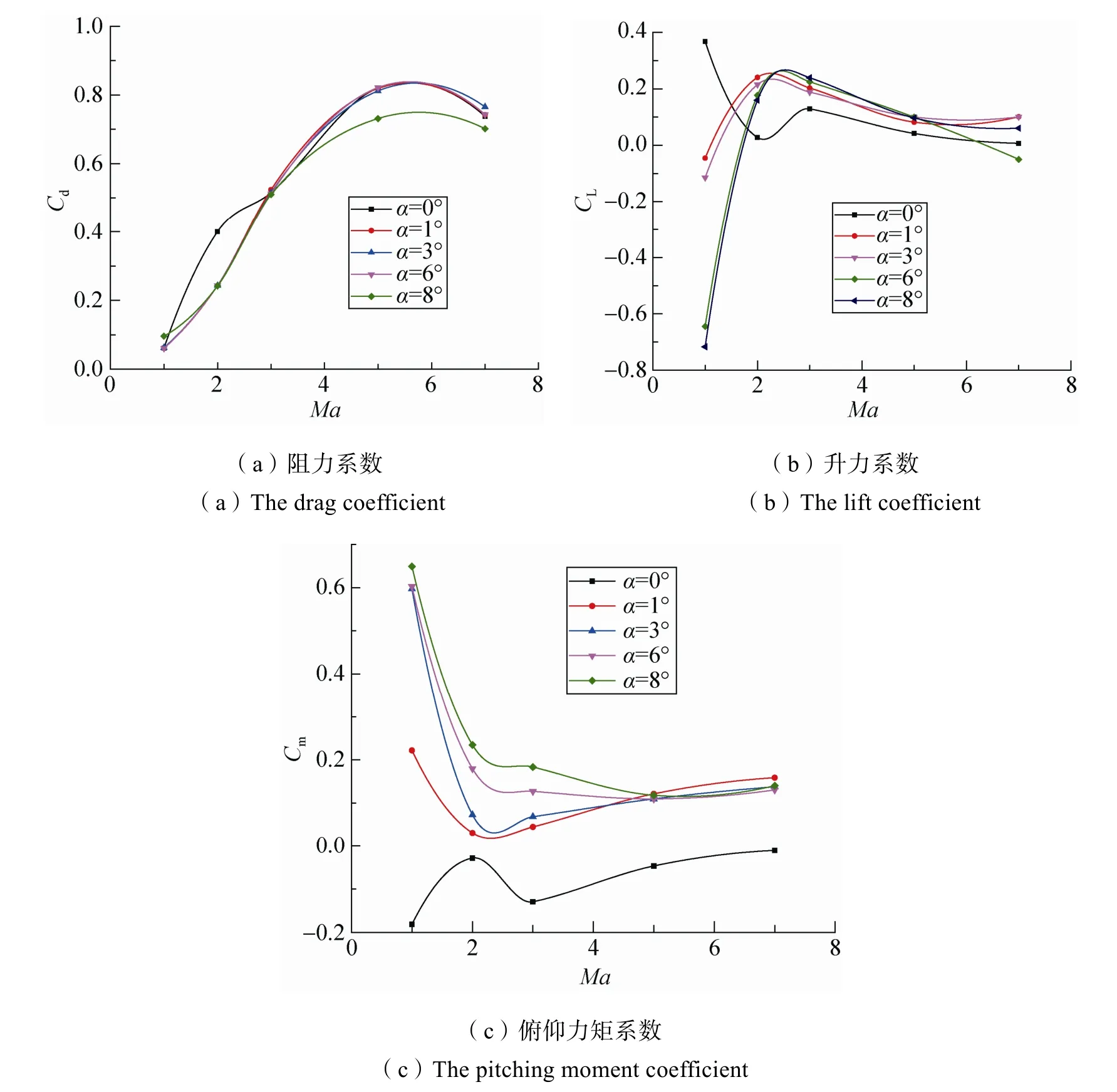
圖10 速度對氣動系數的影響(不同迎角下)Fig.10 The influence of speed on aerodynamic coefficients(at different attack angles)
由圖7~10可以看出,隨著迎角的增加,返回艙尾渦向上偏轉,流場不再對稱,返回艙尾部下方出現高馬赫區并且不斷增大;返回艙前方駐點向下翼面移動,壓強由1 055Pa下降到938Pa;下翼面高壓區不斷擴大,返回艙穩定性降低。迎角的改變對返回艙的升力系數和力矩系數會產生比較大的影響。
隨著速度的增加,尾渦區變得更為細長,弓形激波夾角減小,前翼面壓強增加幅度大于后翼面使得前后壓差的增大,此時阻力系數隨速度的增加,而當速度大于Ma=5時,前翼面壓強的增加幅度小于后翼面壓強增加,前后壓差減小使得阻力系數下降。速度的增加使分離點向后移動,駐點由下翼面向上移動,膨脹波影響區域越來越大,返回艙后部壓力變得更加均勻,升力和俯仰力矩變小;在Ma≤2時,返回艙后部膨脹波較強對尾渦影響較大,Ma越小后部不對稱壓差增加,升力系數絕對值更大,俯仰力矩變化也較大。
6 結束語
充氣式返回艙具有很好的環境適應性及優良的減速性能,在航天器回收減速領域具有很好的發展前景。本文采用數值模擬方法考察了超音速情況下無粘模型對計算準確性的影響,研究了迎角及速度變化對返回艙氣動性能的影響。得出以下結論:
1)隨著速度的增加粘性力對于阻力系數的影響越來越小;當Ma≥4時,無粘模型的計算結果與粘性模型計算結果相差很小;但無粘模型計算穩定性優于粘性模型,計算時間更短。
2)迎角增加,駐點向下翼面移動,流場不再對稱,穩定性降低,返回艙的升力系數和力矩系數影響較大,而阻力系數受迎角影響較小。
3)速度增加,分離點向后移動,返回艙尾渦區變得更為細長,弓形激波夾角減小,返回艙的阻力系數會升高之后再逐漸降低,Ma≥5時氣動阻力最大;當Ma≤2時,臨近跨音速區,尾部流場變化劇烈,上下壓力變化更為敏感,升力系數和俯仰力矩變化較大。
References)
[1]ALKANDRY H, BOYD I D, REED E M, et al. Interactions of Single-nozzle Sonic Propulsive Deceleration Jets on Mars Entry Aeroshells[J]. Spacecraft and Rockets, 2011, 48(4): 564-572.
[2]RICHARDSON E H, MUNK M M, JAMES B F. Review of NASA In-space Propulsion Technology Program Inflatable Decelerator Investments[C]//18th AIAA Aerodynamic Decelerator Systems Technology Conference, Munich, 2005.
[3]陳國良, 高樹義. 中國航天器回收著陸技術50年成就與展望[J]. 航天返回與遙感, 2008, 29(3): 27-32. CHEN Guoliang, GAO Shuyi. The Development and Prospect of Spacecraft Recovery and Landing Technology in the Last Fifty Years in China[J]. Spacecraft Recovery &Remote Sensing, 2008, 29(3): 27-32. (in Chinese)
[4]KENDALL R T. Development and Use of Inflatable Payload Recovery Vehicles[R]. AIAA 92-0888-CP, 1991.
[5]LINDELL M C, HUGHES S J, DIXON M, et al. Structural Analysis and Testing of the Inflatable Re-entry Vehicle Experiment (IRV)[C]//47th AIAA/ASME/ASCM/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Rhode Island, Newport, 2006: 1-4.
[6]衛劍征, 馬瑞強, 譚惠豐, 等. 單充氣環薄膜型返回艙氣動特性分析[J]. 航天返回與遙感, 2013, 34(7): 882-883. WEI Jianzheng, MA Ruiqiang, TAN Huifeng, et al. Analysis of Aerodynamic Characteristics of Inflatable Membrane Aeroshell[J]. Spacecraft Recovery and Remote Sensing, 2013, 34(7): 882-883. (in Chinese)
[7]FURUYA H, NAKAHARA M, MURATA S, et al. Concept of Inflatable Tensegrity for Large Space Structures[R]. Newport: 47th AIAA Structures, Structural Dynamics, and Materials Conferences, 2006.
[8]沈祖煒. 可膨脹再入防熱錐的技術進展[J]. 航天返回與遙感, 2001, 22(2): 1-6. SHEN Zuwei. Inflatable Re-entry Shield of Payload Recovery Technology[J]. Spacecraft Recoery and Remote Sensing, 2001, 22(2): 1-6. (in Chinese)
[9]LINDELL M C, HUGHES S J, DIXON M, et al. Structural Analysis and Testing of the Inflatable Re-entry Vehicle Experiment (IRVE)[C]//Newport: 47th AIAA Structures, Structural Dynamics, and Materials Conferences, 2006.
[10]李爽, 江秀強. 火星進入返回艙技術綜述與展望[J]. 航空學報, 2015, 36(2): 422-440. LI Shuang, JIANG Xiuqiang. Review and Prospect of Decelerator Technologies for Mars Entry[J]. Journal of Astronautics, 2015, 36(2): 422-440.(in Chinese)
[11]WILDE D, WALTHER S. Flight Test and ISS Application of the Inflatable Reentry and Descent Technology (IRDT) [J]. Acta Astronautica, 2002, 51(1-9): 83-88.
[12]MURMAN S M. Dynamic Simulations of Atmospheric-entry Capsules[J]. Journal of Spacecraft and Rockets, 2009, 46(4): 829-835.
[13]LITTON D K, BOSE D M. Inflatable Re-entry Vehicle Experiment (IRV)-4 Overview[C]//21st AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar, Ireland, Dublin, 2011: 23-26.
[14]九州蟲. 膨脹的野心—美國 IRV-3任務帶給我們的啟示[EB/OL]. [2012-08-06]. http://blog.sina.com.cn/s/ blog_5387c42f0102dzbs.html.JIU Zhouchong. The Vaulting Ambition-the Enlightenment of IRV-3 Mission in the United States Gives Us[EB/OL]. [2012-08-06]. http://blog.sina.com.cn/s/blog_5387c42f0102dzbs.html. (in Chinese)
[15]賀衛亮, 才晶晶. 一次發射多次返回的充氣式再入飛行器技術[J]. 載人航天, 2011(4): 37-42. HE Weiliang, CAI Jingjing. Inflatable Reentry Technologies Research for Single Launching and Multi-Reentry (SLMR) Space Transporting System[J]. Human Spaceflight, 2011(4): 37-42. (in Chinese)
[16]唐偉, 桂業偉, 王安齡, 等. 充氣氣囊減速方案的氣動設計研究[J]. 宇航學報, 2007, 28(2): 265-268. TANG Wei, GUI Yewei, WANG Anling, et al. Aerodynamic Design for an Inflatable Reentry and Descent Decelerator[J]. Journal of Astronautics, 2007, 28(2): 265-268. (in Chinese)
[17]夏剛, 程文科, 秦子增. 充氣式防熱罩再入軌道設計[J]. 國防科技大學學報, 2002, 3(24): 7-8. XIA Gang, CHENG Wenke, QIN Zizeng. Re-entry Trajectory Design of Inflatable Thermal Shield[J]. Journal of National University of Defense Technology, 2002, 3(24): 7-8. (in Chinese)
[18]ROE P L. Generalized Formulation of TVD Lax-wendroff Schemes[R]. ICASE, 1984: 84-53.
[19]YOON S, JAMESON A. Lower-upper Symmetric Gauss-sediel Method for the Euler and Navier-Stoker Equation[J]. AIAA Journal, 1988, 26(9): 1025-1026.
[20]PEERY K. Blunt-body Flow Simulations[J]. AIAA Journal, 1988, 29(6): 2904-2910.
The Prediction of Aerodynamic Performance of Inflatable Reentry Vehicle at Various Speeds and Attack Angles
ZHAO Xiaoshun YU Li YANG Xue
Aerodynamic deceleration is one of the key technologies for aerospace vehicles. The inflatable reentry vehicle can increase its payload by reducing the weight of the return system, which has the obvious advantages of light weight, easy package, large drag area, low ballistic coefficient, and small heat generated by hypersonic air. The NASA's Inflatable Reentry Vehicle (IRV-3) is used as an example to study the flow field numerical calculation of different speeds and attack angles, by using finite volume method. Comparing the viscous flow field numerical model result with the inviscid model, result shows that inviscid model in supersonic cases can meet certain accuracy requirements, improving the stability and the calculation efficiency. The aerodynamic performances at different speeds and attack angles are also studied. The results indicate that drag coefficient increases with increased much number and then gradually decreases, which reach a maximum value at 5Ma. When the attack angle changes at small angle, the changes of pitching moment coefficient and lift coefficient are bigger than the drag coefficient. A proper attack angle can reduce the pitching moment coefficient, which improves the stability of inflatable reentry vehicle. The results of this paper have reference value for design and analysis of inflatable reentry vehicles.
inflatable reentry vehicle; aerodynamic performance; CFD; viscosity model; space recovery
V411.3
: A
: 1009-8518(2016)05-0027-10
10.3969/j.issn.1009-8518.2016.05.004
2015-11-02
趙曉舜,男,1990年生,現在南京航空航天大學人機與環境工程專業攻讀博士學位。研究方向為航天器的再入、減速。E-mail:zhaoxiaoshun123@126.com。
(編輯:劉穎)
(College of Aerospace Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
國家自然科學基金(11172137)資助項目;江蘇高校優勢學科建設工程資助項目(PAPD)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19