飛機螺旋運動測量技術的發展
2016-02-21 02:38:50YANWei
民用飛機設計與研究 2016年4期
顏 巍 / YAN Wei
(上海飛機設計研究院,上海201210)
飛機螺旋運動測量技術的發展
顏 巍 / YAN Wei
(上海飛機設計研究院,上海201210)
立式風洞是研究飛機尾旋與尾旋改出的特種設施。由于尾旋試驗模型的大小受限于風洞的試驗段尺寸和流場的邊界條件,較難在模型內部安裝測量系統,早期均采用外部系統對處于螺旋運動狀態的飛機模型姿態進行捕捉、辨識,進而分析飛機的尾旋特性與改出特性。隨著材料科學、智能加工技術和信號傳輸技術的發展進步,測量系統向模塊化、微型化和超微型化發展,使得測量機構能夠安置于飛機模型的內部,這樣不僅可以實時測量數據并記錄,不需要到試驗后才進行判讀和辨識,而且所測量的數據更加完整。
人工判讀測量系統;全視場尾旋測量系統;航向參考系統
0 引言
飛機在飛行過程中若全機迎角超過臨界迎角,則飛機自身會發生復雜的旋轉運動,即螺旋運動。這種復雜運動的實質是一種極不穩定的、高度非線性的六自由度運動,即飛機沿自身三個軸向進行直線運動的同時,還圍繞三個軸發生自轉運動,飛機沿著小半徑的螺旋形軌跡下落,就像芭蕾舞演員那樣踮起腳尖旋轉。在螺旋運動中的飛機部分失去操縱性,有時甚至完全失去操縱性,飛行員很難判別飛機的姿態,旋轉的方向,甚至飛行的高度,如果不能立刻迫使飛機迎角回到亞臨界迎角范圍,則飛機無法從螺旋運動中改出。為了研究飛機的螺旋運動和螺旋的改出,科研人員采用了一系列的方式與方法,如CFD計算、大氣模型自由飛試驗和立式風洞試驗等。立式風洞是研究飛機螺旋運動和螺旋改出的設施。目前世界上立式風洞的形式主要有三種:直流式(日本防衛省技術研究本部第3研究所Φ4m立式風洞)、單回流式(俄羅斯ЦАГИ的T-105 Φ4.5m立式風洞)、雙回流式(美國NASA Langley Φ20ft VST)。將滿足幾何相似與動力相似的飛機模型投入到立式風洞試驗段內,使得模型在上升氣流中自由地進入螺旋運動,調節試驗段氣流速度,保證飛機模型在作螺旋運動時處于懸浮狀態。在研究改出螺旋時,使用專門的自動駕駛儀控制模型上的可偏轉舵面來迫使飛機改出螺旋運動。
與模型靜態測力試驗測量氣動力不同,立式風洞試驗為全動態試驗,可測量的參數均為角度和運動參數。受立式風洞試驗段口徑和流場邊界的限制,螺旋試驗模型一般較小,翼展在1m~1.4m。受質量和慣量的限制,模型需要足夠輕,這樣較難在模型內部安裝測量儀器,尤其是在早期機械式陀螺儀又大又笨重的情況下,模型在螺旋運動中各參數隨時間變化規律的測量不得不依賴外部系統。隨著技術的發展,特別是微型陀螺儀等儀器的投入使用,使得飛機模型螺旋運動參數的測量更加精確,數據更完善。
1 立式風洞模型運動的測量系統
1.1 人工判讀測量系統
此法很古老,俄羅斯中央流體力學研究院T-105立式風洞和美國NASA蘭利立式風洞在二十世紀三、四十年代的飛機模型尾旋試驗研究中使用這種測量方法。蘇聯解體后,中國科研人員從俄羅斯中央流體力學研究院T-105立式風洞處學習并獲得此套系統的技術和設備。其測量過程是采用高速膠片攝像機將立式風洞中飛機模型的運動過程拍攝下來,圖1 a)展示了蘭利立式風洞高速膠片攝像機拍攝時的立體示意圖。試驗中采用了兩個高速攝像機,一個在風洞上部洞壁的側面,一個在風洞底部圓心位置,尾旋試驗過程中用64幀/秒的高速膠片攝影機記錄下模型的運動姿態。圖1 b)展示了蘭利立式風洞飛機模型尾旋試驗時從側面所拍攝的飛機模型運動的連續畫面。獲得膠片后進行沖洗,然后用專用的投影放映機將一張張膠片上的圖像投影到一個屏幕上,采用人工手動的方法與專用的解碼模型投影進行比對,即在投影前放置一個與試驗模型完全等比例縮小的對比模型,直至模型姿態與膠片中的投影完全一致,讀出此時縮小模型的空間姿態(俯仰角、滾轉角)記為對應時刻的運動模型空間姿態,通過這樣一種解碼判讀方式獲得試驗模型的運動姿態。圖1 c)展示了T-105立式風洞的尾旋試驗模型與解碼模型對比。此種測量方式簡單直觀,因為有人工參與的過程,對圖像質量要求較低,對光噪聲干擾要求低。但這種方法也存在先天的不足,主要有以下幾點:1) 數據判讀時間極長,一次試驗的判讀時間就要一周左右;2) 模型制作成本高;3) 模型姿態的判讀受人為因素影響,不可避免地會引入人為誤差;4) 數據不足,一般選擇較為關注的時間段,選擇一定的時間間隔進行判讀,所以人工判讀獲得的數據量小,間隔大,數據不足。時至今日,此種測量方法在NASA蘭利立式風洞中已被摒棄,而T-105立式風洞仍然采用此種方法,雖然經過幾次改進,但其基本方法沒有大的改變。
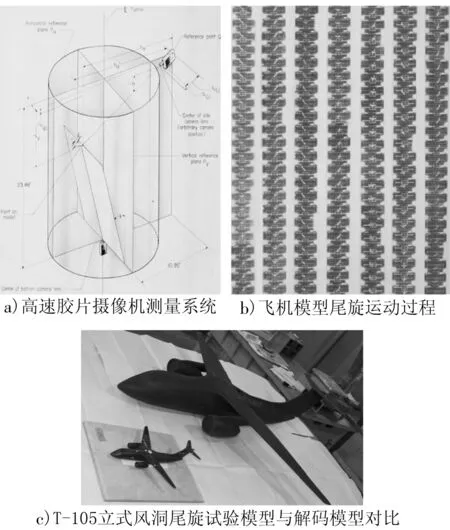
圖1 立式風洞高速膠片攝像機系統、拍攝結果與解碼模型
1.2 全視場尾旋測量系統
由于人工判讀方法的弊端,科研人員開發了全視場尾旋測量系統[1],該系統采用基于圖像采集與處理的雙目圖像測量技術,其基本原理是基于光學中心的面投影方程。所有內部方位參數和外部方位參數通過相機校準而確定,這些參數確定后,目標在2D圖像平面的坐標和3D物理空間的坐標的關系得以確定。系統采用4臺攝像機,分成A、B兩組,每組2臺形成雙目立體視覺,如圖2 a)所示。任一目標點在一組攝像機成像后,可解出目標的空間坐標,再根據其解算模型的各種運動參數。系統應用計算機并口進行圖像采集控制,用脈寬調制接口進行舵面偏轉控制,可以實現模型舵面控制、圖像采集的同步記錄,測量系統的結構示意如圖2 b)所示。
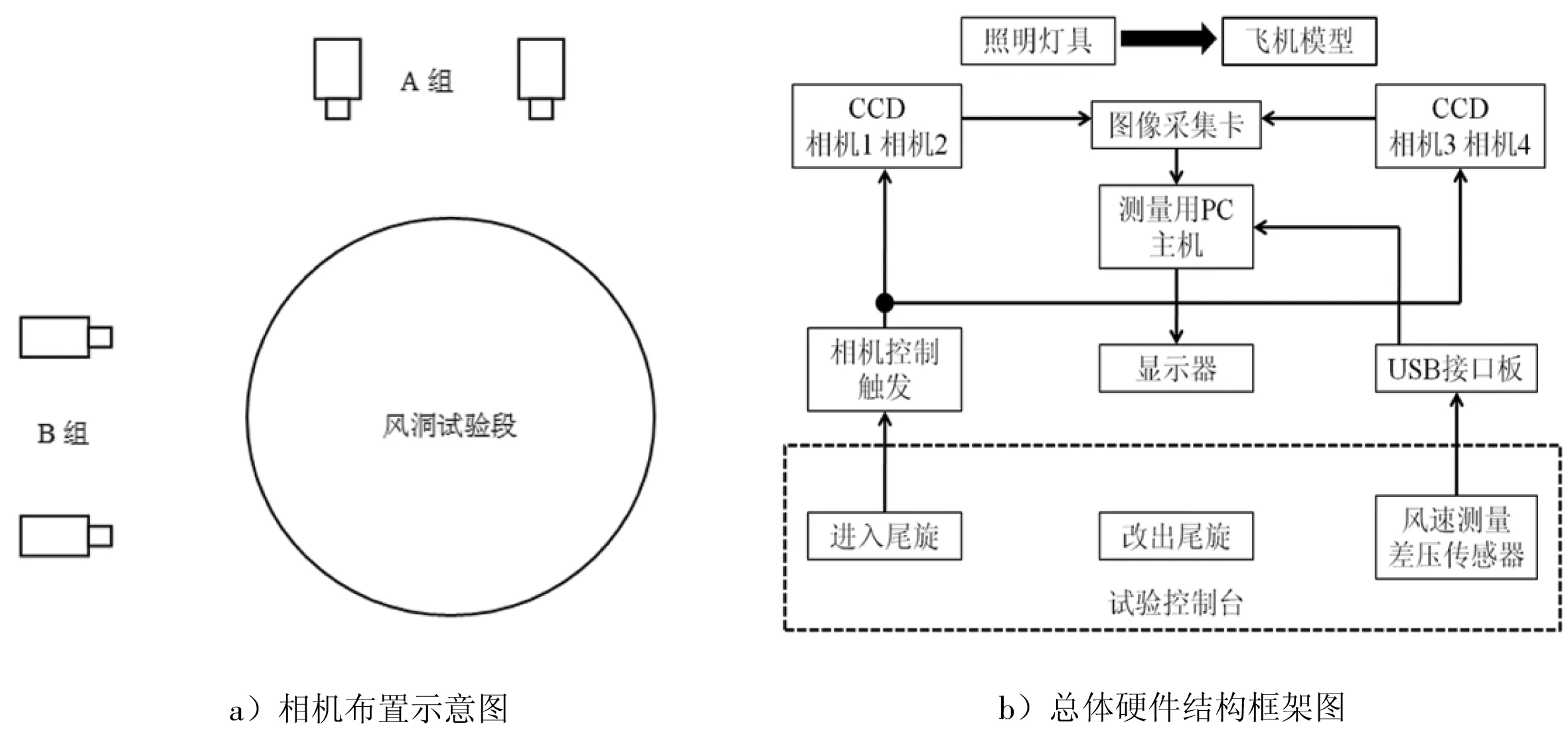
圖2 全視場尾旋測量系統
要獲得模型尾旋時的各種運動參數及姿態參數,最理想化的方法是通過獲得模型中心點及模型X、Y、Z 軸上各一點在每一時刻的坐標(風軸),即可獲得模型尾旋時的各種運動參數及姿態參數。但是,由于尾旋試驗要求非接觸測量及模型三維自由運動等的特殊性,直接獲得這些參數很難。所以需要通過在機身上打上不同的標記,標記點一般為白色,如圖3 a)所示。為了保證圖像的高對比度,在打標記點之前,需要在模型表面噴上亞光漆,如圖3 b)所示,通過CCD相機來識別飛機在某一時刻的空間相對位置和飛機的姿態。當能正確確定標記點的空間實測坐標以后,用一組能夠描述飛機姿態的標記點就能夠正確判讀運動中的飛機姿態。一般來說,可以對飛機姿態進行判定的標記點組合主要有四種,如圖4所示,這四種組合基本囊括了實測過程中所有飛機可能出現的姿態。
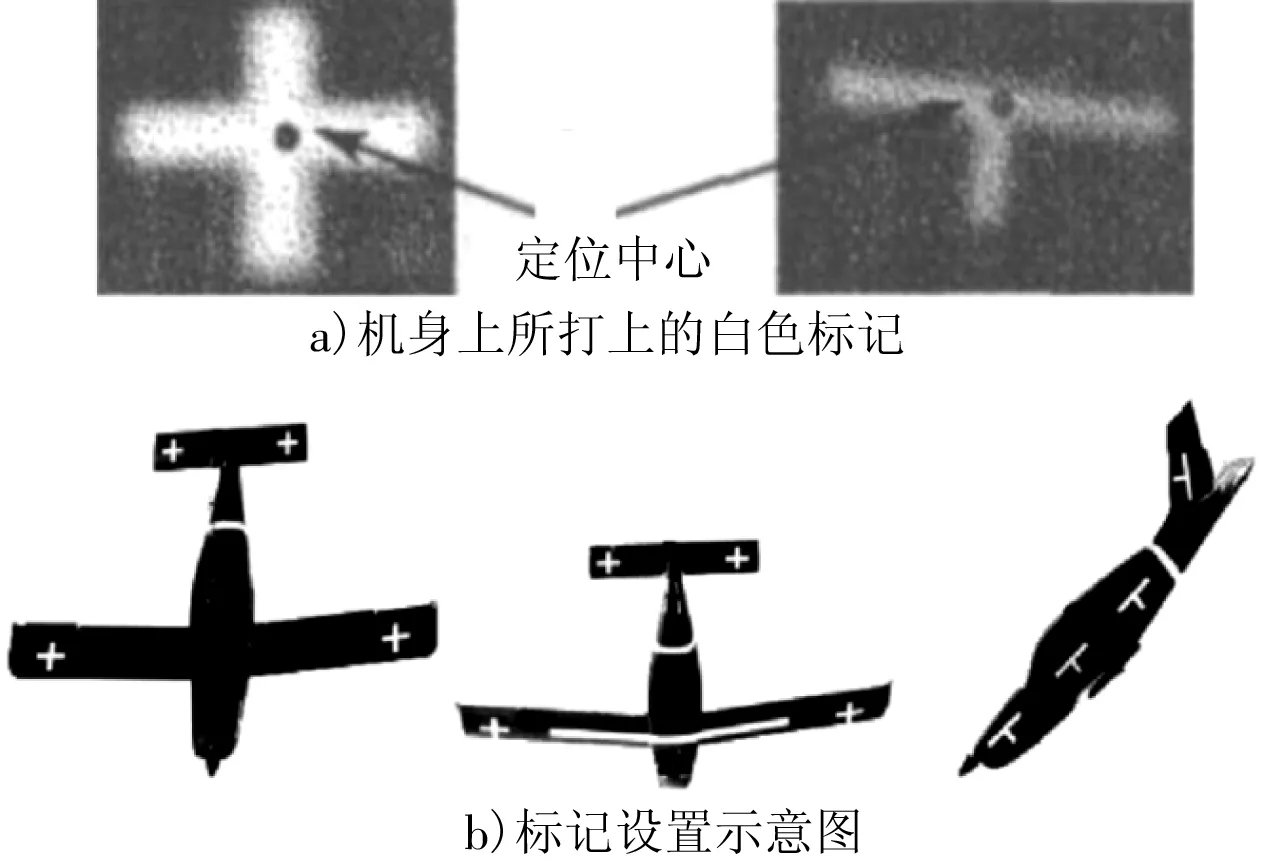
圖3 “十”字和“T”字標記點示意圖
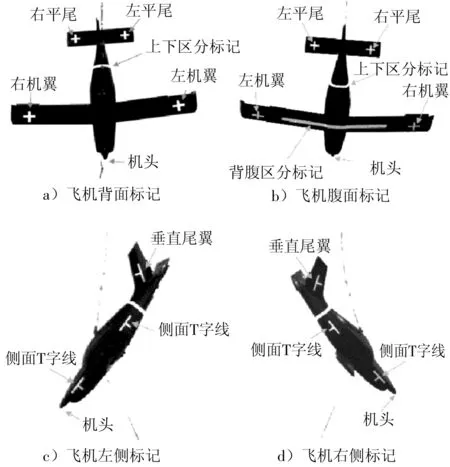
圖4 標記點組合判定模型姿態示意圖
為了準確判讀飛機在空間的位置和姿態,還需要對立式風洞試驗段的空間固定坐標進行準確標定和校核,目的是為了建立風洞洞體坐標系與飛機機體坐標系的關系,這就需要標定圖像板,圖5展示了標定圖像板以及空間坐標標定的過程示意。在完成了以上工作后,即圖像識別系統設置、模型標定、空間標定以及風速標定和計算模塊設置,就可以獲得飛機模型姿態、旋轉角速度等信息[2]。
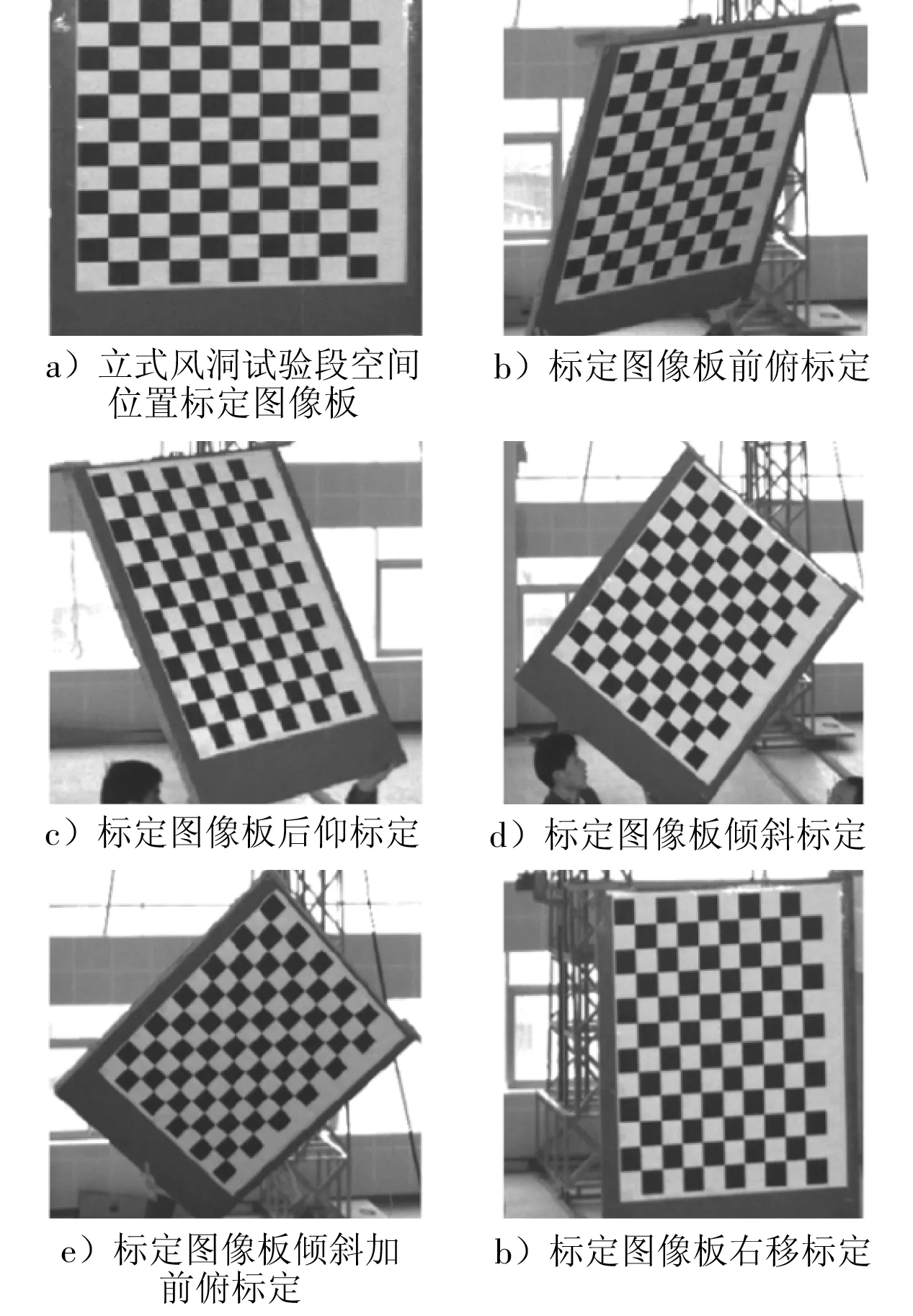
圖5 空間位置標定圖像板
隨著立式風洞型號試驗經驗的累積,“十”字形和“T”字形標定越來越顯示出一些不利的地方,首先這種標定方式比較耗費時間和精力,靈活性較差。有時“十”字形標記和“T”字形標記不易區分,對圖像點進行匹配的時候很難做到自動匹配。因此立式風洞尾旋試驗的研發人員開發了一種新的標記方式,稱為編碼標記點,如圖6 a)、b)所示,將大圓環的外圈分成面積相等的8份,中心圓為定位圓,對每一個外環顏色區標記為1,黑色區標記為0,這樣就構成了一個8位二進制數,將二進制換算到十進制,上圖中最小二進制為00100101,換算到十進制則編號為37。將不同的編碼標記點按照一定的規則粘貼在飛機模型的不同部位,如圖6 c)所示。試驗中首先需要對編碼標記進行定位和解碼,流程為:讀入圖像→圖像預處理→檢測圓心→編碼標記點解碼,飛機模型上的每一個編碼點都有唯一的一個編碼值,相對于“十”字形和“T”字形標定,這種方法可以有很多種不同的編碼,標記點有更高的靈活度。
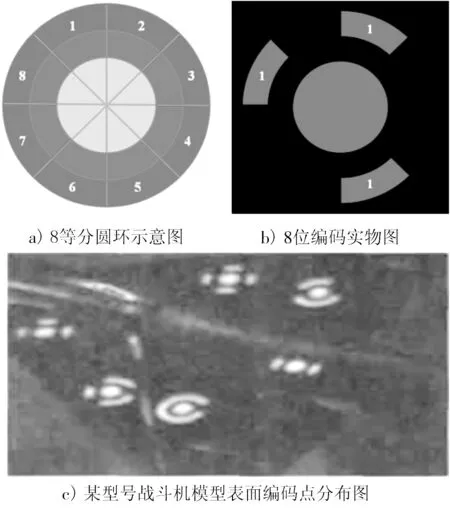
圖6 8位編碼標記示意圖
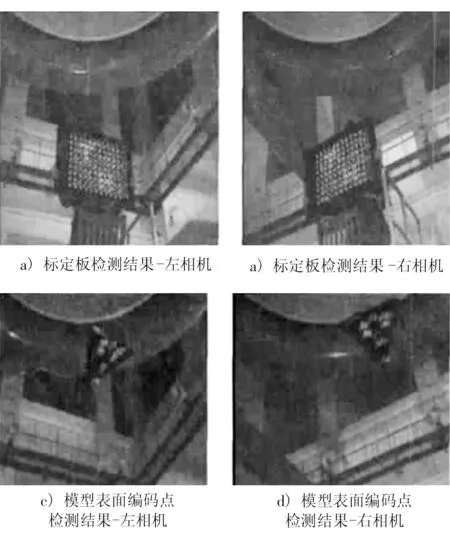
圖7 標定板檢測與模型表面編碼點檢測
試驗中,首先用尺寸大小為0.6m×0.8m,包含有99個圓的標定板進行標定,根據相機的視場范圍將標定板放置7~35個不同位置,利用雙目攝像機對標定板中的每一個圓的圓心進行定位,如圖7 a)和b)所示,其實質是建立了雙目攝像機所拍攝的空間三維系統與風洞洞體坐標系的關系。此外,還需要用三維坐標測量儀精確測量各標志點中心在機體坐標系中的三維坐標。然后開啟風洞,將打上編碼點的飛機模型送入立式風洞,當模型在旋轉運動時,通過雙目攝像機對飛機的運動進行圖像采集,結束后對圖片中模型表面的標記點進行定位,如圖7 c)和d)所示,將機體體軸系下機體表面的編碼點坐標轉換到風洞洞體坐標系下的坐標,即建立了風洞洞體坐標系下三維特征點坐標與飛機模型機體坐標系下三維特征點坐標的一個穩定轉換關系,這樣通過兩種坐標系的轉換關系就可以較為準確地求得飛機模型的俯仰角、滾轉角和偏航角[3]。
1.3 微型姿態航向參考系統
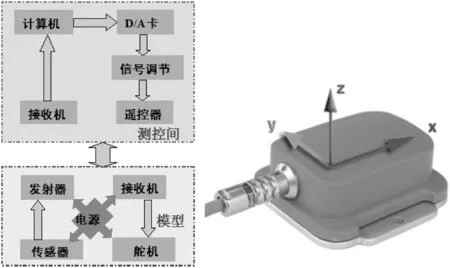
圖8 MEMS傳感器及工作原理示意圖
全視場尾旋測量系統在輸出數據和處理數據上比人工判讀測量系統在效率上要高出很多,但在試驗前需要花費大量時間進行空間位置定位和模型標記點定位。隨著科技的進步,傳統、粗笨的機械式陀螺儀逐漸被微型機電式(MEMS)陀螺儀所取代,這種微型陀螺儀體積小、質量輕、信號可無線傳輸,可以將其放置于飛機尾旋模型內部,在滿足質量和慣量的前提下,盡可能地使微型陀螺儀的質心與飛機模型的質心重合,若空間限制遠離模型質心時,應考慮將試驗結果換算至質心。目前一些立式風洞試驗模型所使用的微型陀螺儀是荷蘭XSENS公司生產的MTI-28A53G25型姿態航向參考系統[4],其外形和工作模式如圖8所示,系統內部主要包括三軸加速度計、三軸陀螺儀、三軸磁強計和溫度傳感器,這些組成了姿態的感知部分,此外還有16位AD、內部DSP和非易失性存儲器、電源模塊和接口收發器等組件。當飛機模型在立式風洞試驗段做螺旋運動時,微型測量系統開始工作,通過三軸加速度計、三軸陀螺儀、三軸磁強計測量出飛機姿態的數據,經過AD轉換后獲得原始數據,該數據可以直接輸出,也可以用于系統內部物理傳感器,進而獲得準確的傳感器數據[5]。
三軸加速度計可以同時測量x、y、z三個方向上的加速度值。MTI微型姿態航向參考系統所采用的加速度傳感器為硅微三軸加速度傳感器。市場上所出售的MEMS傳感器包含有幾種基于不同原理的硅微三軸加速度傳感器,如電容式、壓阻式、熱電偶式、諧振式、光波導式和隧道式,其中電容式最為常見[6]。
三軸陀螺儀可以同時測量繞x、y、z三個軸的旋轉角速度。MTI微型姿態航向參考系統所采用的陀螺儀為振動式微陀螺儀,它利用科里奧利效應測量運動物體的角速度,即當一個物體沿著一個方向運動且施加角一個旋轉率時,則該物體收到一個垂直方向的力,從電容感應結構可以測到科里奧利效應所產生的位移。MEMS陀螺儀有兩個方向的可移動電容板,當微型陀螺儀隨著飛機模型做螺旋運動時,徑向電容板加震蕩電壓迫使物體作徑向運動,橫向的電容板測量由于橫向科里奧利運動帶來的電容變化,科里奧利力與角速度成正比,所以電容的改變可以計算出角速度[7]。
三軸磁強計測得的數據用來校準由陀螺的數據計算而產生的偏航角。溫度傳感器測得的溫度數據用來在計算航向時所需要的溫度補償。
傳感器信息采用無線數據傳輸模式,數據格式為RS232格式,避免因數據線引入額外的懸掛繩干擾問題。試驗前,通過對微型姿態航向參考系統進行編程開發,將其輸出速率與光學測量系統同頻,實現光學測量信息與微型姿態航向參考系統信息的同步記錄。
2 結論
本文簡要回顧了立式風洞尾旋試驗測量技術的發展歷史,從較為古老的人工判讀測量系統,發展為全視場尾旋測量系統,再到包含微型陀螺儀的微型姿態航向參考系統。為需要進行立式風洞尾旋試驗研究的飛機型號提供了參考。
[1] 蔣敏.立式風洞尾旋測量系統研制[D].長沙:國防科技大學,2006.
[2] 張德久.立式風洞尾旋運動姿態參數計算機視覺測量系統的研制[D].長沙:國防科技大學,2007.
[3] 李沛,等.一種基于雙目視覺原理的飛機尾旋運動姿態測量方法[J].國防科技大學學報,2008,30(2):111-115.
[4] 喬熠暉.MTI慣性測量單元及其測試平臺的研究[D].太原:中北大學,2012.
[5] 黃會明,等.飛機尾旋三維測量試驗的改進方法[J].實驗流體力學,2013,27(2):77-81.
[6] 張海濤,等.MEMS加速度傳感器的原理及分析[J].電子工藝技術,2003,24(6):260-262.
[7] MEMS傳感器的原理和應用[Z].哈爾濱工業大學,2012.
Development of Measurement Technique for Aircraft Spin Motion
(Shanghai Aircraft Design and Research Institute, Shanghai 201210, China)
Spin tunnel is a specific facility to investigate aircraft spin and spin recovery. Since the size of aircraft spin model is limited by cross section of test section and flow field boundary condition, it is difficult to set the measurement system inside model. In earlier time, the attitude of spin model was captured and identified by the external system to analyze further aircraft spin characteristics and recovery characteristics. With the development of materials science, intelligent processing technology and signal transmission technology, measurement system is modularized, miniaturized and ultra microminiaturized, and it can be set inside the aircraft spin model. Thus, data can be taken during the tests, interpretation and identification can be carried out simultaneously, furthermore, the measured data is more complete.
manual interpretation measurement system; full field measurement system; navigation reference system
10.19416/j.cnki.1674-9804.2016.04.001
V212
A
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
環球時報(2022-05-30)2022-05-30 15:16:57
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年11期)2019-06-24 03:40:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
光學精密工程(2016年6期)2016-11-07 09:07:19
